Изобретение относится к электромагнитным измерениям и предназначено для использования при бесконтактном определении уровней переменного и постоянного токов методом преобразования их электромагнитного поля в информационный сигнал магнитомодуляционного датчика.
Известен способ измерения тока, основанный на измерениях тангенциальной составляющей напряженности магнитного поля в n точках замкнутого контура, охватывающего токопровод с измеряемым током, измерении напряженности поля в n+1 точке пространства, проводимых синхронно с измерениями тангенциальной составляющей напряженности в n точках контура, определении значения измеряемого тока суммированием результатов измерения тангенциальной составляющей напряженности магнитного поля в n точках контура с учетом относительного изменения напряженности магнитного поля в n+1 точке пространства за временной интервал между проводимыми измерениями; замкнутому контуру придают форму, имеющую центральную ось симметрии, измерения тангенциальной составляющей напряженности магнитного поля осуществляют одновременно в попарно симметричных точках контура, дополнительно измеряют составляющую напряженности магнитного поля в n+2 точке пространства, расположенной симметрично относительно оси симметрии n+1 точки пространства, причем суммирование результатов измерения тангенциальной составляющей напряженности магнитного поля в n точках контура осуществляют с учетом относительного изменения усредненного значения напряженностей поля в n+1 и n+2 точках пространства (А.С. СССР №966608, МКИ3 G 01 R 19/00, 1982 г.).
Недостатком способа является то, что магнитопровод датчика охватывает проводник с измеряемым током, это создает неудобства эксплуатации, так как проводник с током должен иметь разрывы, а также ограничивает возможности реализации способа при различиях сечений и конфигураций проводников с током.
Также известна реализация способа бесконтактного измерения силы больших электрических токов, содержащая первый источник тока, первый потокочувствительный датчик и выходной прибор, в который введены второй источник тока и второй потокочувствительный датчик, расположенный на заданном расстоянии от первого потокочувствительного датчика, а также блок умножения, блок вычитания и блок деления, при этом первые входы блока умножения и блока вычитания соединены с первым источником тока и с первым потокочувствительным датчиком, вторые входы блока умножения и блока вычитания соединены со вторым источником тока и вторым потокочувствительным датчиком, выход блока умножения соединен с первым входом блока деления, а выход блока вычитания подключен к второму входу блока деления, выход которого соединен с выходным прибором (А.С. СССР №1624339, МКИ5 G 01 R 19/00, 1991 г.).
Недостатком является малая чувствительность из-за неоптимального расположения осей чувствительности ферромагнитных полуэлементов вдоль проводника с током.
Известен способ измерения больших токов с помощью дифференциального магнитомодуляционного измерительного преобразователя, содержащего магнитопровод, выполненный из отдельных замкнутых ферромагнитных элементов, на которые намотаны секции модуляционной обмотки, охватывающие две близлежащие части каждой пары замкнутых ферромагнитных элементов, соединенные между собой последовательно согласно и подключенные к источнику стабильного переменного тока, и секции измерительной обмотки, соединенные между собой последовательно и включенные в каждой паре секций встречно, причем плоскость витков секций измерительной обмотки расположена параллельно направлению вектора напряженности магнитного поля, создаваемого измеряемым током, замкнутые ферромагнитные элементы имеют участки, выполненные в виде прямолинейных стержней, направленных нормально вектору напряженности магнитного поля, создаваемого измеряемым током, а указанные пары секций измерительной обмотки намотаны на каждом прямолинейном стержне, причем секции измерительной обмотки, намотанные на прямолинейных стержнях соседних ферромагнитных элементов, расположены на одинаковых расстояниях одна от другой и симметрично по длине стержней (А.С. СССР №1437784, МКИ4 G 01 R 19/00, 1988 г.).
Недостатком является сложность исключения посторонних магнитных полей как влияющих факторов на магнитную систему датчиков, в частности полей малых градиентов, из-за высокой чувствительности датчиков, что ведет к ухудшению помехоустойчивости.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является способ определения тока в подземном токопроводе бесконтактным методом, заключающийся в том, что измеряют в двух точках, расположенных на фиксированном расстоянии друг от друга (базе) в плоскости, перпендикулярной токопроводу, компоненты напряженности магнитного поля, создаваемого током, направленные перпендикулярно к базе, и по ним определяют величину тока, дополнительно измеряют направленные параллельно базе компоненты напряженности магнитного поля в каждой из указанных точек, а значение тока определяют по формуле: I=2πb( )/(ηHy1+Hy2Hx1/Hx2). (А.С. СССР №1503020, МКИ4 G 01 R 19/00, 1989 г.)
)/(ηHy1+Hy2Hx1/Hx2). (А.С. СССР №1503020, МКИ4 G 01 R 19/00, 1989 г.)
Недостатком является малая чувствительность из-за неоптимального расположения осей чувствительности ферромагнитных полуэлементов вдоль проводника с током.
Устройством, наиболее близким по технической сущности и достигаемому результату к заявляемому, является магнитомодуляционный дифференциальный измерительный преобразователь, содержащий магнитопровод, выполненный из ферромагнитных элементов, на которые намотаны секции модуляционной обмотки, охватывающие пару ферромагнитных элементов, соединенные между собой последовательно согласно и подключенные к источнику стабильного переменного тока, и секции измерительной обмотки, соединенные между собой последовательно встречно, причем плоскость витков измерительной обмотки расположена параллельно направлению вектора напряженности магнитного поля, создаваемого измеряемым током, прямолинейные участки ферромагнитных элементов, выполненные в виде стержней, направлены нормально вектору напряженности магнитного поля, а секции измерительной обмотки намотаны на каждом прямолинейном стержне (А. С. СССР №1437784, МКИ4 G 01 R 19/00, 1988 г.).
Недостатками устройства являются сложность и невозможность его работы в режиме градиентомера, что снижает помехоустойчивость.
Задачей изобретения является повышение точности и достоверности, расширение динамического диапазона измеряемой величины, упрощение измерительного процесса за счет оптимальной ориентации элементов электромагнитной системы первичного преобразователя.
Решение указанной задачи достигается способом определения тока бесконтактным методом, заключающийся в измерении напряженности его магнитного поля в n-точках, расположенных на фиксированных различных расстояниях от проводника с током, в отличие от прототипа n-точки расположены вдоль оси дифференциального феррозондового градиентомера, состоящего из двух идентичных, ориентированных соосно стержневых ферромагнитных полуэлементов с тонкими магнитными пленками и соленоидными обмотками, разнесенных по оси чувствительности на расстояние Δr и расположенных в плоскости, ортогональной проводнику с током, причем токопровод и ось градиентомера имеют точку пересечения, а зависимость от силы тока информационного сигнала, которым является уровень второй гармонической составляющей частоты возбуждения, определяют формулой:

где I - сила тока в проводнике;
b - коэффициент аппроксимации, зависящий от материала и формы сердечника;
s - поперечное сечение сердечников;
w2 - количество витков сигнальной обмотки;
t - время;
Нm - амплитуда вспомогательного поля;
ω=2πf, f - частота поля возбуждения феррозонда;
l - длина феррозонда;
R - расстояние от феррозонда до проводника с током;
а - длина элементарного участка феррозонда;
r - удаленность ферромагнитного полуэлемента от проводника с током;
Δr - расстояния между ферромагнитными полуэлементами градиентомера;
n - число элементарных участков длины феррозонда;
k - номер элементарного участка.
Решение указанной задачи достигается также устройством измерения тока, выполненным в виде магнитомодуляционного дифференциального преобразователя, содержащим магнитопровод, выполненный из ферромагнитных полуэлементов, на которые намотаны секции обмотки возбуждения, соединенные между собой последовательно согласно, подключенные к источнику стабильного переменного тока, и секции сигнальной обмотки, соединенные между собой последовательно встречно и подключенные к схеме обработки информационного сигнала в отличие от прототипа плоскость витков, как обмоток возбуждения, так и сигнальных обмоток, расположена ортогонально направлению вектора напряженности магнитного поля, а два идентичных ферромагнитных полуэлемента, выполненных в виде тонкопленочных стержней, размещенных внутри бифилярно намотанных в один ряд секций сигнальной обмотки и секций обмоток возбуждения, ориентированы по направлению вектора напряженности измеряемого магнитного поля, при этом ферромагнитные полуэлементы разнесены на заданное расстояние Δr, а уровень информационного сигнала определяется количеством витков и длинной ферромагнитных полуэлементов, расстоянием Δr и удаленностью градиентомера от токопровода.
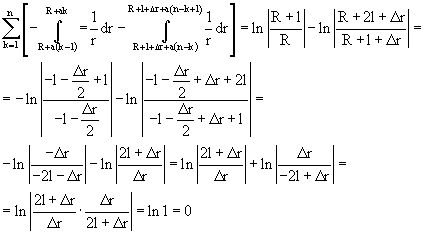
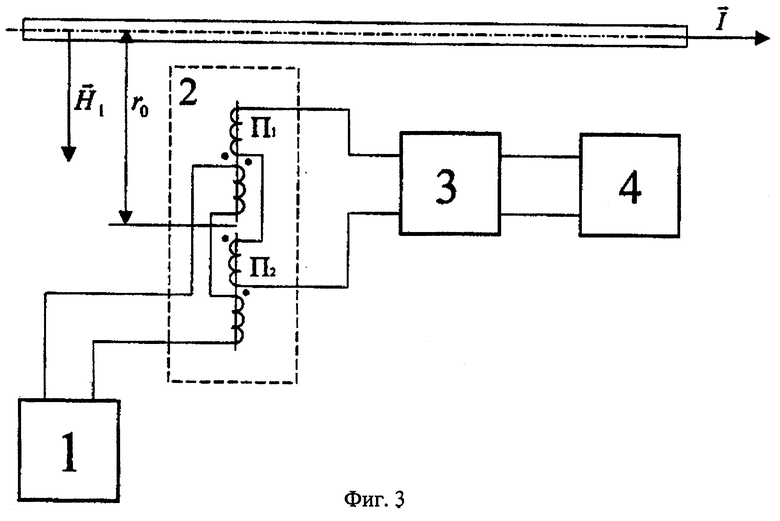
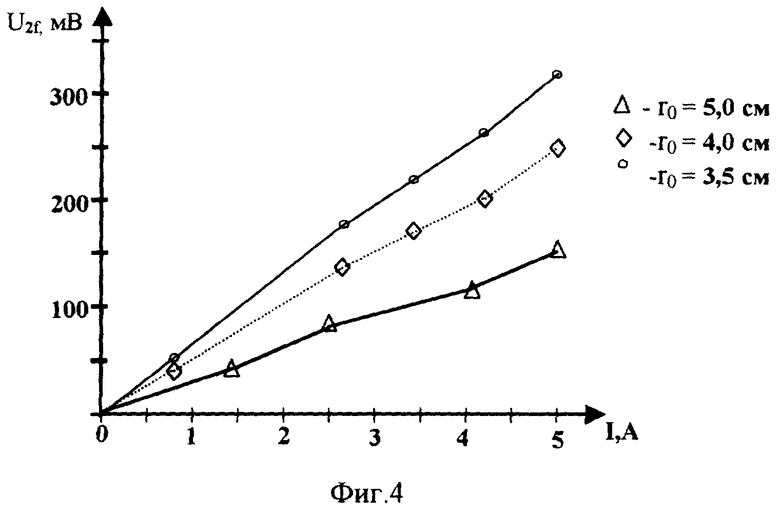
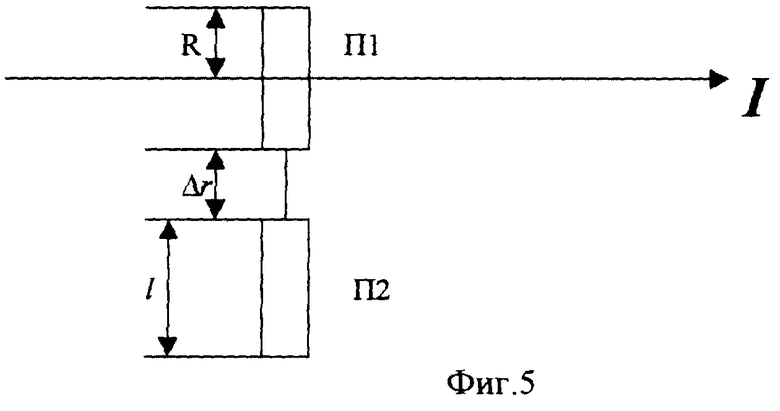
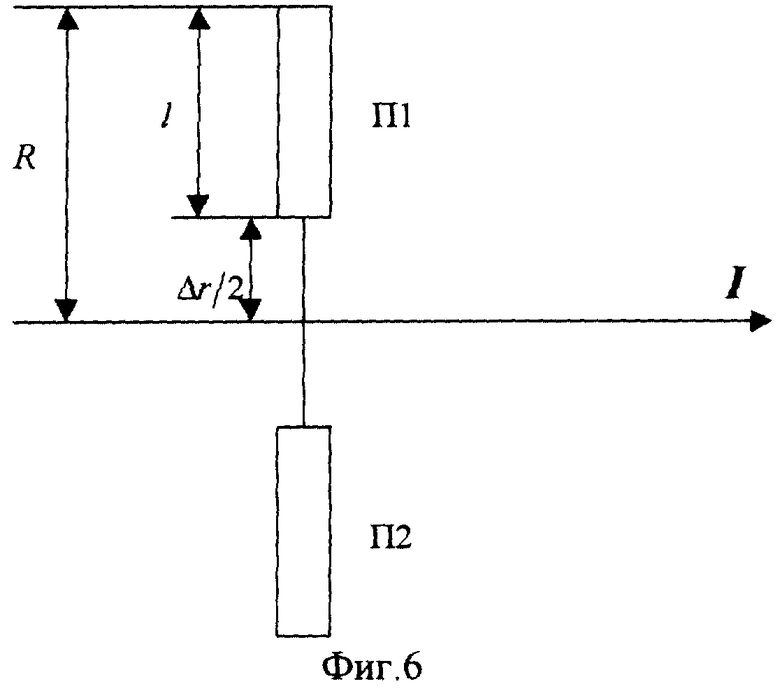
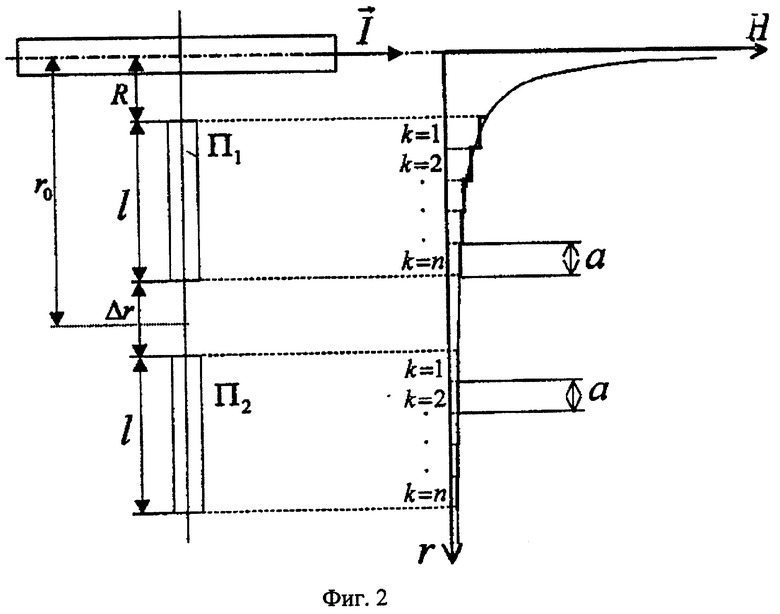
Существо изобретения поясняется чертежами. На фиг.1 изображено взаимное расположение ферромагнитных полуэлементов магнитометра с малой чувствительностью к измеряемому полю, относящееся к прототипу, на фиг.2 изображена оптимальная ориентация ферромагнитных полуэлементов градиентомера относительно токопровода, на фиг.3 изображена функциональная схема магнитометра, на фиг.4 изображена зависимость информационного сигнала магнитометра от силы тока при различной удаленности от токопровода, на фиг.5 изображена схема реализации общей формулы, в которой зависимость от силы тока определяется одним из ферромагнитных полуэлементов градиентомера, на фиг.6 изображена схема реализации общей формулы, в которой информационный сигнал градиентомера равен нулю, т.е. не зависит от силы тока.
Вследствие анизотропии формы магнитных сердечников стержневые феррозондовые преобразователи характеризуются острой диаграммой направленности в осевом направлении, то есть формируют максимальный информационный сигнал при воздействии вектора измеряемой магнитной величины по оси феррозонда. Поэтому в случае расположения ферромагнитных полуэлементов, как на Фиг.1, феррозонд, работающий в режиме градиентомера, имеет малую чувствительность к измеряемому магнитному полю  , создаваемому проводником с током
, создаваемому проводником с током  , из-за неоптимальной ориентации осей ферромагнитных полуэлементов (П1; П2) относительно проводника.
, из-за неоптимальной ориентации осей ферромагнитных полуэлементов (П1; П2) относительно проводника.
Вместе с тем возрастает чувствительность магнитометра к помехам, действующим вдоль оси проводника с током.
Оптимальной ориентацией ферромагнитных полу элементов (П1, П2) градиентомера является расположение их в одной плоскости, ортогональной оси токопровода, и последовательно друг за другом, как на Фиг.2, с разнесением их по оси чувствительности на расстояние Δr, причем магнитометр приближен к токопроводу на расстояние (R).
Интенсивность Н магнитного воздействия по длине l ферромагнитных полуэлементов градиентомера изменяется обратно пропорционально удаленности r от проводника с током. При разбиении l ферромагнитного полуэлемента на элементарные участки а равной длины информационный сигнал U2f градиентомера будет пропорционален разности интегральных воздействий Н на симметричные относительно геометрического центра магнитометра (а) - участки:

где 
(Афанасьев Ю.В. Феррозонды. - Л.: Энергия, 1969. - 166 с.).
Результирующий информационный сигнал U2f равен n сумме интегральных воздействий на а участки (формула (1)).
Формула (1) дает общую зависимость U2f от I по Фиг.2, в частности, для случая r0=(l+Δr)/2. Вариант расположения градиентомера по Фиг.2 обеспечивает высокую его чувствительность к неоднородности магнитного воздействия тока  вдоль ферромагнитных полуэлементов (П1, П2), большой динамический диапазон и возможность измерения не только постоянных, но и переменных токов.
вдоль ферромагнитных полуэлементов (П1, П2), большой динамический диапазон и возможность измерения не только постоянных, но и переменных токов.
Таким расположением ферромагнитных полуэлементов градиентомера задается зависимость его результирующего информационного сигнала U2f от электромагнитных характеристик и длины ферромагнитных полуэлементов, их взаиморасположения и удаленности от проводника с током.
Устройство содержит: генератор возбуждения 1, стержневой градиентомер 2, состоящий из ферромагнитных полуэлементов П1 и П2, блок обработки сигнала 3 и блок отображения информации 4. Информация со стержневого градиентомера в виде уровня напряжения U2f поступает в блок обработки сигнала 3, где он фильтруется, усиливается, выпрямляется, преобразуется в код и поступает в блок отображения информации 4. На выпрямителе, расположенном в блоке обработки 3, производится детектирование информационного сигнала 2f=125 кГц, что позволяет измерять не только постоянные, но и переменные токи повышенной частоты - до 10 кГц.
Магнитометр, в соответствии с Фиг.3, функционирует следующим образом: на обмотки возбуждения ферромагнитных полуэлементов градиентомера П1 и П2, включенные последовательно согласно, поступает переменный ток с частотой f=62,5 кГц и действует так, что устанавливает в равноудаленных от центра симметрии магнитометра сечениях сердечников П1 и П2 одинаковый уровень магнитной проницаемости. При этом уровень информационного сигнала частоты 2f=125 кГц, получаемого с сигнальных обмоток ферромагнитных полуэлементов П1 и П2,, соединенных последовательно встречно, будет равен нулю, так как бифилярный однослойный способ намотки обмоток возбуждения и сигнальных обмоток вдоль каждого из двух ферромагнитных стержней обеспечивает полную идентичность электромагнитных параметров ферромагнитных полуэлементов П1 и П2.
Вектор магнитного поля  , созданный током
, созданный током  в проводнике, действует на магнитометр таким образом, что интенсивность его воздействия является переменной величиной по длине каждого из ферромагнитных полуэлементов градиентомера. Магнитная проницаемость стержневых сердечников изменяется в соответствии с разностью магнитных воздействий по их длине - происходит разбаланс измерительной системы градиентомера, в результате чего в сигнальной обмотке формируется информационный сигнал U2f, уровень которого пропорционален измеряемому
в проводнике, действует на магнитометр таким образом, что интенсивность его воздействия является переменной величиной по длине каждого из ферромагнитных полуэлементов градиентомера. Магнитная проницаемость стержневых сердечников изменяется в соответствии с разностью магнитных воздействий по их длине - происходит разбаланс измерительной системы градиентомера, в результате чего в сигнальной обмотке формируется информационный сигнал U2f, уровень которого пропорционален измеряемому  току.
току.
Пример конкретной реализации способа.
Во время испытания ферромагнитные полуэлементы градиентомера находились в плоскости, ортогональной оси токопровода, последовательно друг за другом с разнесением на расстояние Δr=1,5 см, как на Фиг.2.
При помощи источника питания постоянного тока устанавливался измеряемый ток, протекающий по токопроводу. Величина тока фиксировалась по амперметру. Диапазон изменения тока от 0 до 5А.
В ходе эксперимента изменялась величина тока в токопроводе, в диапазоне (0..5)А для каждого из заданных расстояний r0 от экваториального сечения до оси токопровода.
В результате взаимодействия двух полей: магнитного поля, создаваемого током при протекании по токопроводу, и магнитного поля, создаваемого в градиентомере обмоткой возбуждения, в измерительных обмотках наводится информационный U2f сигнал, который наблюдают по осциллографу, а величину фиксируют по вольтметру.
1) Общая длина градиентомера равна 5 см. Экваториальное сечение r0 удалено от шины с током на 8,5 см (Δr=1,5 см). При I=0...5 [A] U2f=0.
2) Экваториальное сечение r0 удалено от шины с током на 6,0 см (Δr=1,5 см). При I=0...5 [А] влияние тока в шине проявлено, но эффект незначителен, порядка 10%.
3) Экваториальное сечение r0 удалено от шины с током на 5,5 см. При I=0-5 [А] изменение уровня U2f порядка 30%.
4) Экваториальное сечение r0 удалено от шины с током на 5,0 см.
Результаты занесены в таблицу 1:
5) Экваториальное сечение r0 удалено от шины с током на 4,5 см.
Результаты занесены в таблицу 2:
6) Экваториальное сечение r0 удалено от шины с током на 4,0 см.
Результаты занесены в таблицу 3:
По результатам испытаний были построены графики зависимости U2f(I), представленные на Фиг.4.
Как видно из Фиг.4, градиентомер имеет характеристику U2f=F(I), близкую к линейной, что согласуется с представленной в разделе “Сущность изобретения” теоретической зависимостью. Некоторая нелинейность объясняется влиянием внешних помех - следствием действия магнитных полей, создаваемых различными магнитными массами, которые находятся в лаборатории.
ПРИМЕНЕНИЕ ОБЩЕГО УРАВНЕНИЯ ДЛЯ ЧАСТНЫХ СЛУЧАЕВ РАСПОЛОЖЕНИЯ
ГРАДИЕНТОМЕРА ОТНОСИТЕЛЬНО ПРОВОДНИКА С ТОКОМ.
В общем случае уровень информационного сигнала градиентомера определяется формулой (1).
Формула [1] преобразуется:

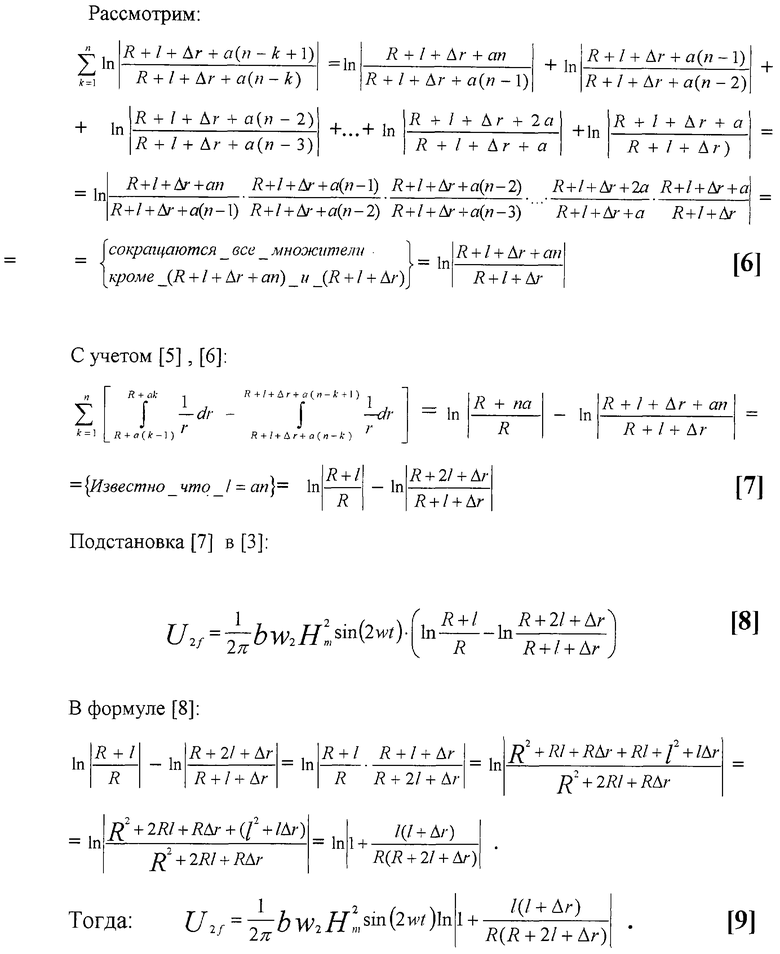
Как видно из [9], U2f не зависит от а, k, n. Зависит от R, l, Δr - параметров градиентомера, что подтверждает теоретические положения “Описания...” и “Формулы изобретения”.
Частные случаи расположения ферромагнитных полуэлементов П1 и П2 градиентомера относительно проводника с током.
1. На Фиг.5 представлен случай, когда ось I проходит через середину ферромагнитного полуэлемента П1, то есть  .
.
С учетом [5], [7] и подставляя  :
:

Таким образом, по Фиг.5 составляющая U2f, формируемая ферромагнитным полуэлементом П1, равна 0. То есть, U2f - сигнал только полуэлемента П2.
2. На Фиг.6 изображен случай, когда ось I проходит через экваториальное сечение градиентомера, то есть 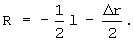 Для системы координат, заданной на фиг.1, линейные размеры элементов, находящихся в верхней полуплоскости Фиг.6, принимают отрицательные значения, то есть для П1 текущая координата r<0.
Для системы координат, заданной на фиг.1, линейные размеры элементов, находящихся в верхней полуплоскости Фиг.6, принимают отрицательные значения, то есть для П1 текущая координата r<0.
Из формул [1], [4]-[7]:
Таким образом, по Фиг.5 информационный сигнал датчика U2f=0, - в соответствии с определением градиентомера.
Приведенные материалы подтверждают справедливость общей формулы [1] и согласуются с результатами технической реализации способа.
Два идентичных полуэлемента дифференциального феррозондового магнитометра (градиентомера) ориентируют ортогонально проводнику с измеряемым током и располагают на заданных расстояниях от проводника последовательно друг за другом. Магнитные сердечники полуэлементов градиентомера выполнены в виде тонкопленочных стержней. Изобретение направлено на повышение точности измерений, расширение динамического диапазона измеряемой величины и упрощение измерительного процесса за счет оптимальной ориентации элементов магнитометра. 2 н.п. ф-лы, 3 табл., 6 ил.

где I - сила тока в проводнике;
b - коэффициент аппроксимации, зависящей от материала и формы сердечника;
s - поперечное сечение сердечников;
w2 - количество витков сигнальной обмотки;
t - время;
Нm - амплитуда вспомогательного поля;
ω=2πf, f - частота поля возбуждения феррозонда;
l - длина феррозонда;
R - расстояние от феррозонда до проводника с током;
а - длина элементарного участка феррозонда;
r - удаленность феррозондового полуэлемента от проводника с током;
Δr - расстояния между феррозондовыми полуэлементами градиентомера;
n - число элементарных участков длины феррозонда;
k - номер элементарного участка.
| Способ определения тока в подземном токопроводе бесконтактным методом | 1987 |
|
SU1503020A1 |
| Дифференциальный магнитомодуляционный измеритель больших токов | 1986 |
|
SU1437784A1 |
| Устройство для бесконтактного измерения силы больших электрических токов | 1988 |
|
SU1624339A1 |
| Способ измерения тока | 1981 |
|
SU966608A1 |

