Изобретение относится к области измерительной техники и может быть использовано при проектировании геофизической аппаратуры и создании магнитометров для измерения постоянных магнитных полей как по модулю, так и по направлению.
Известен способ определения полного пространственного вектора магнитного поля, заключающийся в последовательном определении магнитных составляющих по трем взаимно ортогональным направлениям Нx, Нy и Hz с помощью одного феррозонда, который последовательно ориентируется по каждой составляющей (Афанасьев Ю.В. Феррозонды. Л., "Энергия", 1969, стр.148).
Недостатками данного способа являются:
1) сложность измерений, связанная с необходимостью последовательного ориентирования феррозонда;
2) большая погрешность измерений в угловых положениях оси чувствительности феррозонда, близких к линии действия вектора измеряемого магнитного поля, обусловленная тем, что информационный сигнал изменяется по функции косинуса.
Известен феррозондовый датчик азимута для измерения горизонтальной составляющей магнитного поля Земли, содержащий подложку из диэлектрического материала с выполненными на ней параллельно друг другу профилированными пазами, в которых размещены два одинаковых сердечника в виде тонких стержней из немагнитного материала с нанесенной на них ферромагнитной пленкой, причем он снабжен дополнительными тонкими стержнями из немагнитного материала с нанесенной на них ферромагнитной пленкой, а на подложке выполнены дополнительные профилированные пазы ортогонально основным, при этом дополнительные тонкие стержни из немагнитного материала с нанесенной на них ферромагнитной пленкой размещены в дополнительных пазах (а.с. СССР 1158749, Е 21 В 47/02, 1985 г.).
Основными недостатками данного устройства являются:
1) работа датчика только в плоскости горизонта, то есть невозможность измерения им полного вектора магнитного поля Земли;
2) оси чувствительности ортогональных феррозондов не лежат в одной плоскости, так как пазы расположены один над другим;
3) полуэлементы каждого из дифференциальных феррозондов несоосны;
4) пазы имеют прямоугольную форму, что может привести к деформации обмоток феррозонда;
5) ориентация осей чувствительности феррозондов по вектору опорного поля зависит от углового положения корпуса прибора.
Известно также устройство с источником опорного поля в виде колец Гельмгольца на корпусе прибора, в котором проекции вектора опорного поля на оси чувствительности феррозондов содержат информацию об угловом положении прибора (Афанасьев Ю.В. Феррозонды. Л., "Энергия", 1969, стр. 146).
Основными недостатками данного устройства являются:
1) наличие подвижных частей феррозондового датчика, что ведет к слабой виброустойчивости;
2) ограничение частоты опорного поля, вследствие инерционности феррозондов с многовитковыми обмотками и объемными сердечниками, и, как следствие, недостаточное быстродействие прибора и усложнение схемы преобразования информативного сигнала.
Известно устройство для осуществления способа изготовления трехкомпонентного датчика магнитного поля с тремя взаимно ортогональными феррозондами, образующими базис. Это устройство снабжено тремя блоками ориентации, расположенными внутри опорной фигуры, каждый из которых выполнен в виде параллелепипеда со штоком, на котором закреплен магниточувствительный элемент датчика, и механизмом для углового перемещения по двум взаимно перпендикулярным направлениям, а опорная фигура выполнена в виде пространственного угла, образованного тремя взаимно ортогональными пересекающимися плоскостями (а.с. СССР 901905, G 01 R 33/02, 1982 г.).
Основными недостатками данного устройства являются:
1) большие габариты;
2) технологическая сложность осуществления способа, в частности:
- сложность механических устройств точного ориентирования осей чувствительности взаимно ортогонально;
- сложность механических приспособлений, закрепляющих датчик в корпусе измерительного прибора.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является феррозондовый датчик магнитного поля, выполненный в виде трех ортогонально расположенных и жестко закрепленных феррозондов, оси чувствительности двух из которых лежат в одной плоскости, ортогональной оси корпуса прибора, а ось чувствительности третьего, расположенного на заданном расстоянии от этой плоскости, совмещена с осью корпуса прибора (Ковшов Г.Н., Миловзоров Г. В. , Прищепов С.К. Обобщенная структура феррозондового инклинометра // Информационно-измерительная техника в нефтяной и нефтехимической промышленности: Межвузовский научно-тематический сборник. Уфа, 1983, с. 17-22).
Данный датчик имеет недостатки:
1) феррозонд, расположенный соосно корпусу прибора, не изменяет информационный сигнал при эволюциях корпуса по визирному углу;
2) феррозонды, оси чувствительности которых ортогональны оси корпуса прибора, не изменяют информационный сигнал при воздействии источника опорного поля, действующего по оси корпуса прибора, например в виде соленоида, размещенного на корпусе прибора;
3) несимметричное расположение полуэлементов феррозондов относительно общего начала координат, что не позволяет без погрешности определить направление магнитной аномалии.
Задача изобретения - повышение точности измерения магнитных воздействий за счет возможности измерения полных векторов магнитного поля как по модулю, так и по направлению.
Указанная задача достигается тем, что в способе измерения полного вектора магнитного поля, заключающемся в последовательном ориентировании одного феррозонда в горизонтальной и вертикальной плоскостях составляющих измеряемого поля, в отличие от прототипа, вводят жестко закрепленную систему из трех взаимно ортогональных феррозондов, расположенных под углом 54,735o к оси корпуса прибора, а измерения проводят, ориентируя прибор в пространстве с учетом опорного поля, направленного вдоль оси корпуса прибора, причем плоскость, общую для вектора измеряемого магнитного поля и поля, создаваемого генератором опорных импульсов, определяют по равенству изменений результирующего информативного сигнала трех феррозондов при равных ортогональных отклонениях оси корпуса прибора относительно данной плоскости, а истинное направление вектора измеряемого магнитного поля определяют по равенству сигналов всех трех феррозондов, так как каждый из них занимает равнозначное угловое положение относительно полного вектора действия измеряемого магнитного поля, и это угловое положение соответствует оптимальной чувствительности феррозондов.
Поставленная задача достигается также тем, что в устройстве, состоящем из трех взаимно ортогональных феррозондов, образующих ортонормированный базис в пространстве, в отличие от прототипа, базис из трех феррозондов расположен в пространстве таким образом, что каждый из феррозондов образует угол 54,735o с осью корпуса прибора и, соответственно, с осью обмотки источника опорного поля, а при измерениях и с вектором действия измеряемого магнитного поля, причем полуэлементы феррозондов с бифилярно намотанными сигнальной обмоткой и обмоткой возбуждения жестко закреплены в профилированных треугольных пазах и расположены соосно.
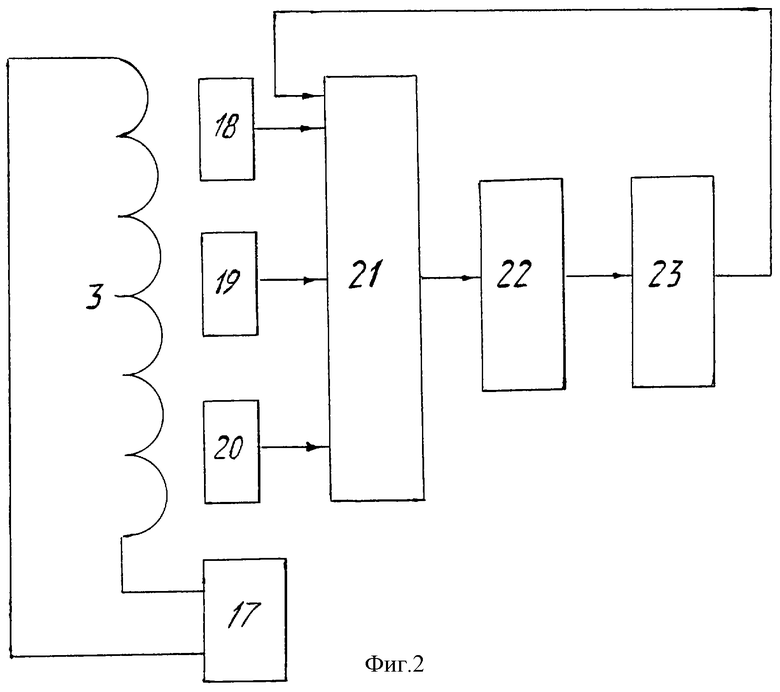
Существо устройства поясняется чертежами. На фиг.1 представлена структура первичного феррозондового преобразователя, на фиг.2 - структурная схема датчика.
Первичный феррозондовый преобразователь (фиг.1) представляет собой основание 1 из немагнитного материала, например алюминия, которое помещено в промежуточную оболочку 2 с намотанной обмоткой соленоида 3. Промежуточная оболочка 2, в свою очередь, расположена в корпусе прибора 4. Основание 1 представляет собой деталь в виде двух соосных конусов с соединенными вершинами. По образующим конусов прорезаны профилированные треугольные пазы 5, 6, 7 (на чертежах не показан), 8, 9, 10 для укладки полуэлементов феррозондов 11, 12, 13 (на чертежах не показан), 14, 15, 16.
Схема преобразования сигнала (фиг.2) включает в себя обмотку соленоида 3, генератор опорного поля 17, феррозонды 18, 19, 20, коммутатор 21, устройство обработки сигнала 22 и микроЭВМ 23.
Устройство работает следующим образом.
При наличии внешнего магнитного поля в измерительных обмотках каждого из трех феррозондов 18, 19, 20, образующих ортонормированный базис, появляются составляющие информативного сигнала. Далее составляющие информативного сигнала поступают в коммутатор 21, который пропускает их поочередно в устройство обработки сигнала 22, где происходит выделение полезного информативного сигнала, а также преобразование его в однополярное линейно изменяющееся напряжение, которое поступает на микроЭВМ 23, где происходит окончательная обработка информативного сигнала и осуществляются математические операции возведения составляющих информативного сигнала в квадрат, суммирования и извлечения корня, и представление результатов на экране дисплея. МикроЭВМ 23 также управляет работой коммутатора 21.
Пример конкретного выполнения способа.
Первоначально прибор помещают в исследуемое магнитное поле и регистрируют текущее значение полного вектора магнитного поля как
где Т - модуль полного вектора измеряемого магнитного поля;
Тx - составляющая полного вектора магнитного поля по оси Х (сигнал первого феррозонда);
Тy - составляющая полного вектора магнитного поля по оси Y (сигнал второго феррозонда);
Tz - составляющие полного вектора магнитного поля по оси Z (сигнал третьего феррозонда).
Таким образом, предварительно определяют модуль магнитного поля.
Затем прибор ориентируют примерно по направлению вектора магнитного поля. Для этого, перемещениями прибора в исследуемом магнитном поле достигают приблизительного равенства показаний сигналов всех трех ферррозондов 18, 19, 20.
Включают генератор опорного поля 17, и генерируемый сигнал поступает на обмотку соленоида 3, расположенную вдоль оси корпуса прибора и жестко закрепленную поверх основного феррозондового блока. В результате создается магнитное поле, соизмеримое с исследуемым полем по модулю и противоположное по направлению.
Далее находят плоскость, общую для вектора измеряемого магнитного поля и вектора магнитного поля, создаваемого генератором опорного поля. Для этого прибор отклоняют от текущего положения относительно своей оси в противоположные стороны на один и тот же угол порядка 5-7o, при этом регистрируют величины изменения суммарного магнитного поля измеряемого поля и поля, создаваемого генератором опорного поля. Если изменения магнитного поля не равны между собой, то изменяют плоскость отклонения прибора, и в новой плоскости заново определяют величины изменения магнитного поля при отклонениях прибора. Эти операции повторяют до тех пор, пока не будет найдено такое положение прибора, при котором отклонение его в противоположные стороны будет вызывать равные изменения магнитного поля. В таком положении прибора плоскость, перпендикулярная плоскости отклонения, будет общей для обоих векторов - вектора измеряемого полного магнитного поля и вектора, создаваемого генератором опорного поля.
После определения общей плоскости действия вектора измеряемого полного магнитного поля и вектора, создаваемого генератором опорного поля, выключают генератор опорного поля, и угловым перемещением оси прибора в найденной плоскости определяют такое его положение, при котором составляющие информативного сигнала всех трех феррозондов строго равнозначны. В этом положении прибор ориентирован точно по направлению вектора измеряемого магнитного поля.
После определения направления вектора магнитного поля проводят проверку величины модуля, так как ориентация прибора по направлению измеряемого магнитного поля соответствует оптимальной чувствительности к изменению угла наклона корпуса прибора, либо к изменению направления действия возмущающего поля.
При всем многообразии конструкций датчиков магнитного поля с использованием феррозондов в научно-технической литературе не приводится по мнению авторов такой, в которой, без существенных ее изменений, была бы реализована заявляемая совокупность взаимосвязанных отличительных признаков:
1) возможность измерения полного вектора магнитной индукции;
2) возможность измерения визирного угла, обусловленная наклонным расположением конструкции в пространстве;
3) конструкция изделия, позволяющая располагать полуэлементы феррозондов соосно;
4) повышенная чувствительность к изменению угла наклона корпуса прибора, либо к изменению направления действия возмущающего поля;
5) повышенная вибропрочность и виброустойчивость, обусловленная треугольным профилем паза;
6) повышенное отношение "сигнал-фон", обусловленное идентичностью намотки сигнальной обмотки и обмотки возбуждения;
7) высокая частота информационного сигнала, обусловленная высокой частотой опорного поля;
8) малые габариты и при этом высокая точность измерений;
9) тонкопленочные сердечники, обусловливающие высокое быстродействие обработки сигнала;
10) малая индуктивность обмоток, также ведущая к увеличению быстродействия. Вследствие этого, собственная частота задающего генератора может достигать значения Fген.собст=1 МГц, а частота опорного поля, модулирующего сигналы феррозондов Fоп=0,01•Fген.собст=10 кГц, лежит в пределах: от 100 Гц до 10 кГц.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2252422C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| ТУРБИННЫЙ РАСХОДОМЕР | 2000 |
|
RU2182660C2 |
| СПОСОБ КАЛИБРОВКИ ИНКЛИНОМЕТРИЧЕСКИХ СИСТЕМ | 2015 |
|
RU2611567C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ГЕОМАГНИТНОГО ПОЛЯ В РАБОЧЕМ ОБЪЕМЕ | 2004 |
|
RU2274870C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНЫХ И ВИЗИРНЫХ УГЛОВ | 1997 |
|
RU2121574C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| Способ измерения магнитного курса подвижного объекта и устройство для его осуществления | 2017 |
|
RU2653599C1 |
Использование: при проектировании геофизической аппаратуры и создании магнитомеров для измерения постоянных магнитных полей как по модулю, так и по направлению. Технический результат заключается в повышении точности измерения магнитных воздействий. Сущность изобретения заключается во введении жестко закрепленной системы из трех взаимно ортогональных феррозондов, расположенных под углом 54,735o к оси корпуса прибора, измерения проводят, ориентируя прибор в пространстве с учетом опорного поля, направленного вдоль оси корпуса прибора, и вычисляя модуль полного вектора измеряемого магнитного поля как корень из суммы квадратов сигналов всех трех взаимно ортогональных феррозондов, причем плоскость, общую для вектора измеряемого магнитного поля и поля, создаваемого генератором опорных импульсов, определяют по равенству изменений результирующего информативного сигнала трех феррозондов при равных ортогональных отклонениях оси корпуса прибора относительно данной плоскости, а истинное направление вектора измеряемого магнитного поля определяют по равенству сигналов всех трех феррозондов, так как каждый из них занимает равнозначное угловое положение относительно полного вектора измеряемого магнитного поля и это угловое положение соответствует оптимальной чувствительности феррозондов. 2 c.п.ф-лы, 2 ил.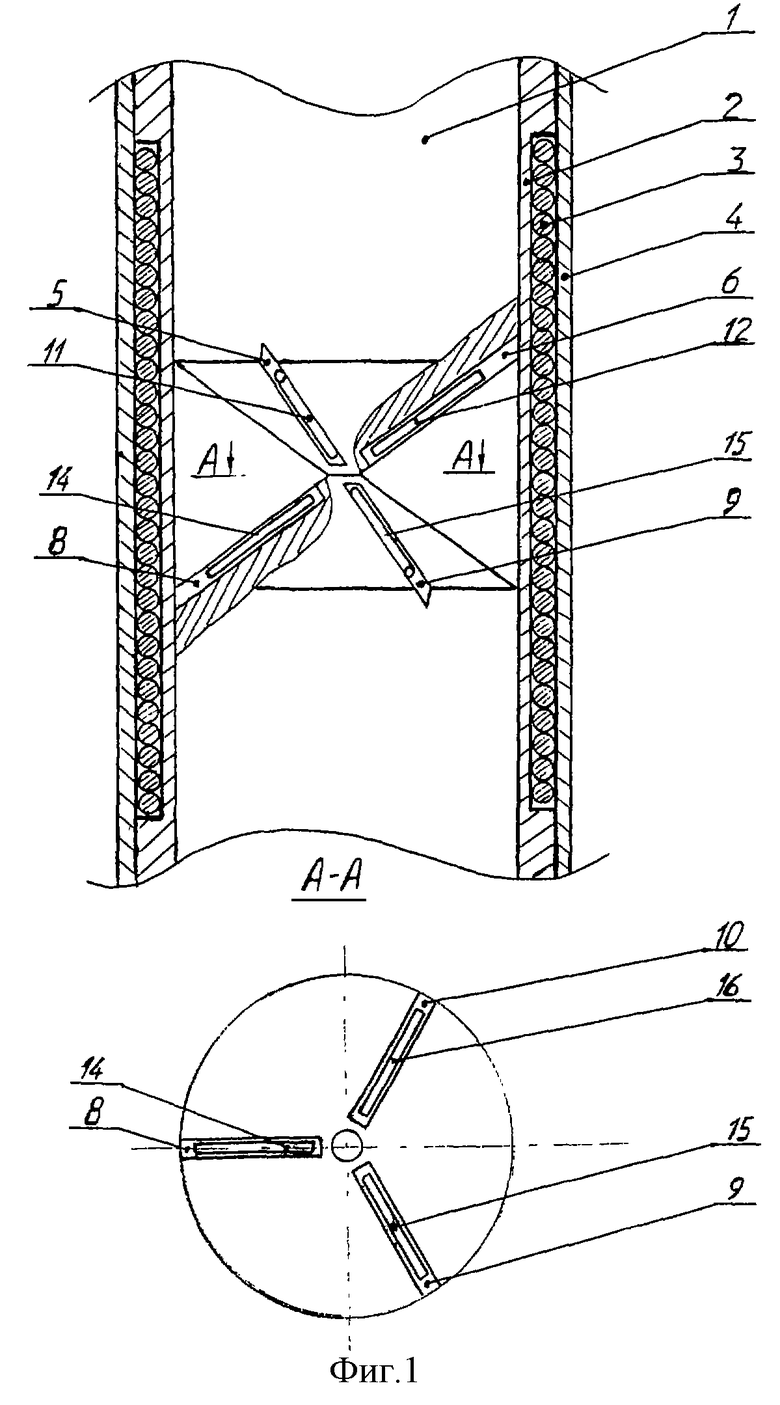
| КОВШОВ Г.Н | |||
| и др | |||
| Обобщенная структура феррозондового инклинометра | |||
| Информационно-измерительная техника в нефтяной и нефтехимической промышленности | |||
| Межвузовский научно-тематический сборник | |||
| - Уфа, 1981, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 1998 |
|
RU2153682C1 |
| ТРЕХКОМПОНЕНТНЫЙ ДАТЧИК МАГНИТНОГО ПОЛЯ | 1989 |
|
RU2006045C1 |
| Феррозондовый магнитометр | 1990 |
|
SU1755219A1 |
| Феррозондовый магнитометр | 1980 |
|
SU930176A1 |
| Способ изменения твердости готовых абразивных инструментов | 1935 |
|
SU45509A1 |

