Изобретение относится к области радиолокации, в частности к устройствам выделения доплеровских сигналов движущихся целей, принимаемых когерентной радиолокационной станцией с непрерывным и импульсным излучением зондирующих сигналов совместно с сигналами пассивных помех, и может быть использовано в системах обнаружения, сопровождения и измерения скорости движущихся целей.
Известен следящий фильтр сигнала движущейся цели, который является наиболее близким по технической сущности к заявляемому устройству (см. Дудко Г.К., Резникова Г.Б. Доплеровские измерители скорости и угла сноса самолета. - М.: Сов. радио, 1964, стр.267, рис.6.16), принятый за прототип. Известное устройство-прототип содержит последовательно соединенные первый усилитель промежуточной частоты (УПЧ), вход которого является входной шиной фильтра, первый смеситель, первый полосовой фильтр и первый частотный дискриминатор, последовательно соединенные второй смеситель и второй УПЧ, последовательно соединенные блок управления и управляемый гетеродин, выход которого подключен ко второму входу первого смесителя.
Недостатками устройства-прототипа являются малая точность фильтрации и низкая помехоустойчивость при выделении доплеровского сигнала от целей, движущихся с малыми радиальными скоростями, из аддитивной смеси с пассивной помехой, например отражений от подстилающей поверхности Земли. Это обусловлено тем, что пассивная помеха имеет неравномерный спектр, который существенно шире спектра сигнала движущейся цели и частично попадает в диапазон анализируемых доплеровских частот сигнала цели. Энергетический центр тяжести спектра остатков пассивной помехи, прошедших полосовой фильтр и поступающих на вход первого частотного дискриминатора, смещает истинное положение центра тяжести доплеровского сигнала движущейся цели в положение, соответствующее энергетическому центру тяжести аддитивной смеси сигнала движущейся цели и остатков пассивных помех. При этом выходное напряжение первого частотного дискриминатора содержит постоянную составляющую ошибки, обусловленную влиянием пассивной помехи, прошедшей на выход первого полосового фильтра, на формирование напряжения рассогласования, что приводит к возникновению ошибки слежения частоты колебаний управляемого гетеродина за центром спектра сигнала движущейся цели, которая может привести к тому, что на выход первого полосового фильтра, а следовательно, и следящего фильтра, будет проходить сигнал движущейся цели с искаженным по отношению к входному сигналу спектром, т.е. фильтрация сигнала цели осуществляется с низкой точностью. Эти искажения спектра полезного сигнала вызывают неточность в работе последующих устройств обработки, особенно тех, которые используют амплитудную информацию спектра сигнала цели. Величина ошибки слежения не остается постоянной, она изменяется как при изменении спектральных характеристик пассивных помех, так и при изменении средней доплеровской частоты сигнала движущейся цели, например для маневрирующей цели, что вызывает случайный непредсказуемый характер результата фильтрации, обусловленный влиянием пассивной помехи на работу фильтра и малой точностью при фильтрации доплеровского сигнала движущейся цели из аддитивной смеси сигнала цели с пассивной помехой.
Задачей настоящего изобретения является создание следящего фильтра сигнала движущейся цели, обеспечивающего повышение точности фильтрации и помехоустойчивости работы следящего фильтра путем снижения влияния пассивных помех на фильтрацию сигналов от целей, особенно движущихся с малыми радиальными скоростями, и на работу следящего фильтра.
Поставленная задача достигается тем, что в следящий фильтр сигнала движущейся цели, содержащий так же, как и прототип, последовательно соединенные первый УПЧ, вход которого является входной шиной следящего фильтра, первый смеситель, первый полосовой фильтр и первый частотный дискриминатор, последовательно соединенные второй смеситель и второй УПЧ, последовательно соединенные блок управления и управляемый гетеродин, выход которого подключен ко второму входу первого смесителя, в отличие от прототипа, введены генератор удвоенной промежуточной частоты, выход которого подключен к первому входу второго смесителя, второй вход которого подключен к выходу первого УПЧ, последовательно соединенные третий смеситель, первый вход которого подключен к выходу второго УПЧ, а второй вход - к выходу управляемого гетеродина, второй полосовой фильтр, второй частотный дискриминатор и блок вычитания, второй вход которого подключен к выходу первого частотного дискриминатора, а выход подключен к входу блока управления, при этом выход первого полосового фильтра является выходной шиной следящего фильтра.
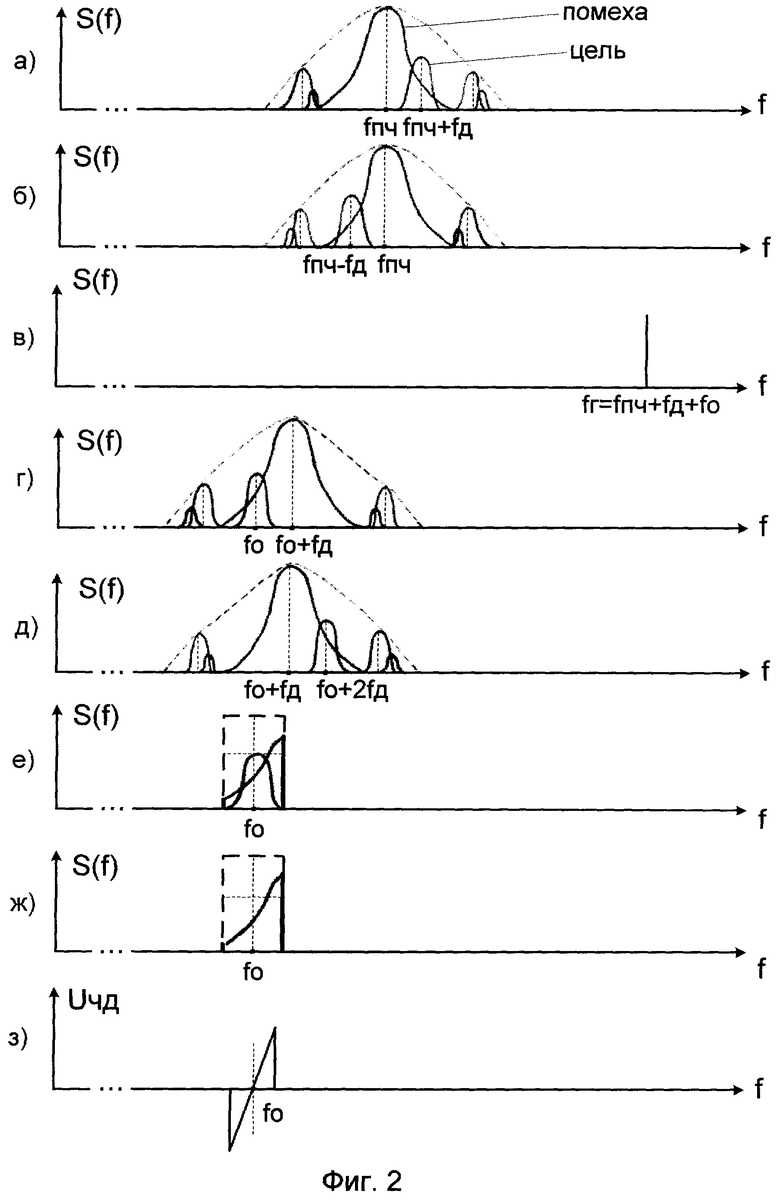
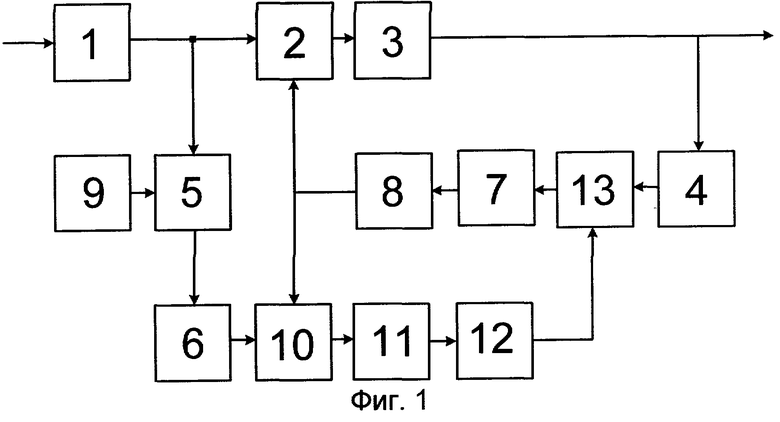
Сущность изобретения поясняется чертежами, где на фиг.1 представлена структурная схема предлагаемого следящего фильтра сигнала движущейся цели, на фиг.2 представлены спектры сигналов и амплитудно-частотные характеристики блоков, поясняющие принцип работы предлагаемого следящего фильтра.
Следящий фильтр сигнала движущейся цели (фиг.1) содержит так же, как и прототип, последовательно соединенные первый усилитель промежуточной частоты (УПЧ) 1, вход которого является входной шиной следящего фильтра, первый смеситель 2, первый полосовой фильтр (ПФ) 3 и первый частотный дискриминатор 4; последовательно соединенные второй смеситель 5 и второй УПЧ 6; последовательно соединенные блок управления 7 и управляемый гетеродин 8, выход которого подключен ко второму входу первого смесителя 2.
В отличие от прототипа в него введены генератор удвоенной промежуточной частоты 9, выход которого подключен к первому входу второго смесителя 5, второй вход которого подключен к выходу первого УПЧ 1; последовательно соединенные третий смеситель 10, первый вход которого подключен к выходу второго УПЧ 6, а второй вход - к выходу управляемого гетеродина 8, второй ПФ 11, второй частотный дискриминатор 12 и блок вычитания 13. Второй вход блока вычитания 13 подключен к выходу первого частотного дискриминатора 4, а выход подключен к входу блока управления 7. Выход первого ПФ 3 является выходной шиной следящего фильтра.
На фиг.2 представлены спектры сигналов и амплитудно-частотные характеристики блоков для случая приближающейся цели, где
а) - спектр сигналов на выходе первого УПЧ 1,
б) - спектр сигналов на выходе второго УПЧ 6,
в) - спектр сигналов на выходе управляемого гетеродина 8,
г) - спектр сигналов на выходе первого смесителя 2,
д) - спектр сигналов на выходе третьего смесителя 10,
е) - спектр сигналов на выходе первого ПФ 3,
ж) - спектр сигналов на выходе второго ПФ 11,
з) - дискриминационная характеристика частотного дискриминатора 4.
Заявляемое устройство работает следующим образом для случая приближающейся цели.
Сигнал с выхода приемника на промежуточной частоте, представляющий собой аддитивную смесь доплеровского сигнала движущейся цели, пассивной помехи и внутриприемного шума, поступает на вход первого УПЧ 1. Ширина полосы пропускания УПЧ согласована с длительностью радиоимпульса. С выхода УПЧ 1 сигнал движущейся цели и пассивная помеха поступают (фиг.2,а) на первый вход первого смесителя 2, на второй вход которого от управляемого гетеродина 8 поступает гармоническое колебание с частотой fг = fпч+fД+fo (где fпч - промежуточная частота; fд - частота доплеровского сдвига; fo - центральная частота настройки первого ПФ 3). Сигнал с выхода первого смесителя 2 (фиг.2,г) поступает на вход первого ПФ 3. Первый ПФ 3, частота настройки которого равна fo, а полоса пропускания равна априори известной ширине основной парциальной составляющей спектра сигнала движущейся цели, осуществляет селекцию сигнала движущейся цели из аддитивной смеси и подавляет основную часть мощности пассивной помехи. Сигнал движущейся цели и остатки пассивных помех, спектральные составляющие которых попали в полосу пропускания первого ПФ 3 (фиг.2,е), поступают на вход первого частотного дискриминатора 4, дискриминационная характеристика которого (фиг.2,з) перекрывает всю полосу пропускания первого ПФ 3, с переходной частотой настройки fo, равной центральной частоте настройки первого ПФ 3.
Напряжение на выходе первого частотного дискриминатора 4 формируется из отклика первого частотного дискриминатора 4 на спектр сигнала движущейся цели и на асимметричный спектр остатков сигнала пассивной помехи (фиг.2,е) и пропорционально частотному рассогласованию между энергетическим центром тяжести сигнала на его входе и частотой настройки fo. Энергетический центр тяжести входного сигнала первого частотного дискриминатора 4 находится в промежутке между энергетическим центром тяжести спектра доплеровского сигнала движущейся цели и энергетическим центром тяжести спектра остатков пассивных помех, прошедших на выход первого ПФ 3.
Одновременно с выхода первого УПЧ 1 сигнал (фиг.2,а) поступает на второй вход второго смесителя 5, на первый вход которого подается напряжение с частотой fген=2fпр от генератора удвоенной промежуточной частоты 9. С выхода второго смесителя 5 (фиг.2,б) сигнал поступает на вход второго УПЧ 6 и после усиления в нем подается на первый вход третьего смесителя 10, на второй вход которого подается сигнал с частотой fг=fпч+fД+fo от управляемого гетеродина 8 (фиг.2,в).
С выхода третьего смесителя 10 (фиг.2,д) сигнал подается на вход второго ПФ 11, центральная частота настройки которого равна fo, а полоса пропускания которого равна полосе пропускания первого ПФ 3. Второй ПФ 11, вследствие симметрии спектра пассивной помехи относительно центральной составляющей спектра пассивной помехи, пропускает только спектральные составляющие пассивной помехи (фиг.2,ж). С выхода второго ПФ 11 сигнал поступает на вход второго частотного дискриминатора 12, имеющего такую же дискриминационную характеристику (фиг.2,з), как и у первого частотного дискриминатора 4. Напряжение на выходе второго частотного дискриминатора 12 пропорционально положению энергетического центра тяжести спектра остатков пассивной помехи, прошедшей второй ПФ 11, относительно переходной частоты fo, и, следовательно, равно помеховой части напряжения на выходе первого частотного дискриминатора 4, пропорциональной положению энергетического центра тяжести остатков пассивной помехи, прошедшей первый ПФ 3. С выхода второго частотного дискриминатора 12 сигнал подается на первый вход блока вычитания 13, на второй вход которого подается сигнал с выхода первого частотного дискриминатора 4.
В блоке вычитания 13 осуществляется вычитание напряжения с выхода второго частотного дискриминатора 12 из напряжения с выхода первого частотного дискриминатора 4. Полученное на выходе блока вычитания 13 напряжение уже не содержит помеховой составляющей, обусловленной влиянием пассивной помехи, а содержит только полезную постоянную составляющую, обусловленную частотным рассогласованием между центральной частотой сигнала движущейся цели и центральной частотой настройки первого ПФ 3, что устраняет влияние пассивной помехи на работу следящего фильтра и повышает помехоустойчивость. С выхода блока вычитания 13 напряжение поступает на вход блока управления 7.
Блок управления 7 вырабатывает напряжение, которое изменяет частоту fг колебаний управляемого гетеродина 8 таким образом, чтобы центральная частота спектра доплеровского сигнала движущейся цели совпадала с центральной частотой настройки fo первого ПФ 3. В устройстве наступает режим автоматического слежения за энергетическим центром тяжести только спектра сигнала движущейся цели.
На выходе первого ПФ 3 получаем отфильтрованный без искажения его спектра доплеровский сигнал движущейся цели (фиг.2,е), который подается на выход следящего фильтра. Ширина полосы спектров пассивных помех и шума на выходе следящего фильтра сигнала движущейся цели определяется шириной полосы пропускания первого ПФ 3, согласованной со спектром сигнала цели, и существенно уже полосы пассивных помех на входе устройства, что повышает выходное энергетическое соотношение сигнал/помеха и обеспечивает улучшение работы последующих устройств, причем спектр полезного сигнала не искажается, что особенно важно для последующих устройств, использующих амплитудную информацию спектра.
Для случая фильтрации сигнала удаляющейся цели от радиолокатора результат работы следящего фильтра сигнала движущейся цели будет аналогичен рассмотренному выше (при движении цели на радиолокатор) с уменьшенным влиянием пассивной помехи.
Известный следящий фильтр позволяет с достаточной точностью производить фильтрацию полезного сигнала на фоне помех и шумов с равномерной спектральной плотностью. Значительную трудность представляет фильтрация сигнала движущейся цели из помех, имеющих неравномерную спектральную плотность в анализируемом диапазоне частот, например пассивных помех от подстилающей поверхности Земли, особенно если характеристики помех изменяются во времени, что обусловлено сильным влиянием пассивной помехи, перекрывающей по спектру анализируемый диапазон частот сигнала цели, на процесс и результат фильтрации, что особенно проявляется при фильтрации сигналов от целей, движущихся с малыми радиальными скоростями.
Предлагаемый следящий фильтр сигнала движущейся цели обладает существенными преимуществами по сравнению с устройством-прототипом по помехоустойчивости работы и точности фильтрации сигнала движущейся цели, принимаемого одновременно с сигналами пассивных помех, имеющих неравномерную спектральную плотность в ожидаемом диапазоне частот и изменяющиеся во времени характеристики, что особенно наглядно проявляется при слежении за частотой и измерении скорости быстро маневрирующей цели, перемещающейся на фоне неоднородных образований (поле-вода-лес).
Технический результат от использования предлагаемого следящего фильтра сигнала движущейся цели, в отличие от прототипа, заключается в повышении точности фильтрации и помехоустойчивости работы следящего фильтра путем снижения влияния пассивных помех на фильтрацию сигналов от целей, особенно движущихся с малыми радиальными скоростями, и на работу следящего фильтра.
Реализация устройства не вызывает практических трудностей, так как вновь вводимые блоки представляют собой завершенные функциональные узлы, выполняемые на основе известных и широко распространенных радиотехнических элементов, выпускаемых отечественной промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ФИЛЬТР СИГНАЛА ДВИЖУЩЕЙСЯ ЦЕЛИ | 2004 |
|
RU2252432C1 |
| СЛЕДЯЩИЙ ФИЛЬТР СИГНАЛА ДВИЖУЩЕЙСЯ ЦЕЛИ | 2004 |
|
RU2252433C1 |
| КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2003 |
|
RU2254594C1 |
| КОГЕРЕНТНО-ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2004 |
|
RU2252430C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ЦЕЛЕЙ НА ФОНЕ ПОМЕХ | 1998 |
|
RU2139552C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| АКУСТИЧЕСКИЙ ТЕЧЕИСКАТЕЛЬ | 2009 |
|
RU2403546C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ АВТОМАТИЧЕСКОГО СЛЕЖЕНИЯ ЗА ДАЛЬНОСТЬЮ | 2011 |
|
RU2463623C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
Изобретение может быть использовано в системах обнаружения, сопровождения и измерения скорости наземных движущихся целей. Достигаемый технический результат - повышение точности фильтрации и помехоустойчивости работы следящего фильтра – обеспечивается путем снижения влияния пассивных помех, создаваемых целями, движущимися с малыми радиальными скоростями и имеющими неравномерную спектральную плотность в ожидаемом диапазоне частот. Преимущества заявленного решения особенно наглядно могут проявиться при слежении за доплеровской частотой и измерении скорости быстро маневрирующей цели, перемещающейся на фоне неоднородных образований. Следящий фильтр сигнала движущейся цели содержит усилители промежуточной частоты (1,6), смесители (2,5,10), полосовые фильтры (3, 11), частотные дискриминаторы (4,12), блок управления (7), управляемый гетеродин (8), генератор удвоенной промежуточной частоты (9), блок вычитания (13). 2 ил.
Следящий фильтр сигнала движущейся цели, содержащий последовательно соединенные первый усилитель промежуточной частоты (УПЧ), вход которого является входной шиной следящего фильтра, первый смеситель, первый полосовой фильтр и первый частотный дискриминатор, последовательно соединенные второй смеситель и второй УПЧ, последовательно соединенные блок управления и управляемый гетеродин, выход которого подключен ко второму входу первого смесителя, отличающийся тем, что в него введены генератор удвоенной промежуточной частоты, выход которого подключен к первому входу второго смесителя, второй вход которого подключен к выходу первого УПЧ, последовательно соединенные третий смеситель, первый вход которого подключен к выходу второго УПЧ, а второй вход - к выходу управляемого гетеродина, второй полосовой фильтр, второй частотный дискриминатор и блок вычитания, второй вход которого подключен к выходу первого частотного дискриминатора, а выход подключен к входу блока управления, при этом выход первого полосового фильтра является выходной шиной следящего фильтра.
| ДУДКО Г.К., РЕЗНИКОВ Г.Б | |||
| Доплеровские измерители скорости и угла сноса самолета | |||
| Москва, Советское радио, 1964, с.267, рис.6.16 | |||
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1993 |
|
RU2054693C1 |
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА СРЕДНЕЙ ЧАСТОТОЙ УЗКОПОЛОСНОГО СПЕКТРА СИГНАЛА | 1980 |
|
SU1069536A1 |
| КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1985 |
|
RU1285924C |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 4496949, 29.01.1985 | |||
| US 5081459 A, 14.01.1992 | |||
| ТУЗОВ Г.И | |||
| Выделение и обработка информации в доплеровских системах | |||
| Москва, Советское радио, 1967, с.132, рис.3.23. | |||

