Предлагаемое изобретение относится к радиолокационной технике и может быть использовано в когерентных импульсных РЛС, использующих сложные сигналы и моноимпульсный принцип пеленгации, предназначенных измерять как координаты отражающей цели, так и угловое положение источников шумовой помехи.
В настоящее время для сопровождения целей по дальности и углу широко используется моноимпульсный принцип, сложные сигналы и доплеровская фильтрация.
Известно устройство формирования угловой ошибки в когерентной импульсно-доплеровской моноимпульсной РЛС при приеме шумового сигнала [1]. В данном устройстве суммарные и разностные сигналы после моноимпульсной антенны переносятся на промежуточную частоту и после усиления на промежуточной частоте с помощью генератора опорного сигнала и двух фазовых детекторов переносятся на видеочастоту с получением действительных сигналов суммы и разности. Полученные сигналы (u∑ и uΔ) оцифровываются, дискретным преобразованием Фурье вычисляется М-точечный спектр комплексного сигнала х=u∑+juΔ, в качестве действительных (Re) и мнимых (Im) частей которого берутся действительные оцифрованные суммарные u∑ и разностные и uΔ сигналы соответственно. По спектральным составляющим найденного спектра Х восстанавливают спектры аналитических суммарных S∑ и разностных SΔ сигналов в области частот i=0...M/2. Спектры S∑ и SΔ используются для расчета угловой ошибки равносигнального направления (РСН) относительно направления на источник шумовой помехи как частное от деления математического ожидания скалярных произведений сигналов S∑ и SΔ по всем спектральным составляющим для i=0...M/2 на математическое ожидание мощности S∑ на тех же частотах (в качестве координат векторов S∑ и SΔ используются их квадратурные составляющие). Для компенсации неидентичности амплитудно-частотных характеристик (АЧХ) суммарного и разностного каналов в режиме тестовых испытаний имитируется тест-сигнал, по которому оценивается относительный сдвиг фаз между каналами, учитываемый при формировании окончательной оценки угловой ошибки.
Недостатком устройства является возможность работы только по шумовому сигналу и сложность расчетов по оценке сигнала ошибки, т.к. оценка выполняется по результатам вычисления математических ожиданий скалярных произведений S∑i и SΔi и мощностей S∑i по всем i-тым спектральным составляющим от i=0 до i=М/2.
Известен способ сопровождения цели, описанный в [2] и взятый в качестве прототипа, позволяющий повысить помехозащищенность сопровождения отражающей цели по отношению к пассивным и активным шумовым помехам при одновременном повышении точности сопровождения. Согласно способу после установки оси равносигнального направления (РСН) в направлении предполагаемой цели по данным предшествующего обзора производится прием отраженного сигнала с образованием на выходе моноимпульсной антенны суммарных и разностных сигналов, полученные сигналы усиливаются малошумящими усилителями на несущей частоте, преобразуются на промежуточную частоту, усиливаются, переносятся на видеочастоту с помощью квадратурно-фазового детектирования с получением квадратурных составляющих каждого сигнала, в заданном диапазоне дальностей производится согласованная фильтрация. Для каждого элемента дальности осуществляется многоканальная доплеровская фильтрация суммарного сигнала, определение мощности сигналов на выходах доплеровских фильтров, пороговое обнаружение сигналов, определение ширины спектра обнаруженных сигналов и сравнение с порогом для селекции истинного сигнала от помехового, отраженного ложной целью. После выбора сигнала на автосопровождение определяют координаты цели (дальность и доплеровскую частоту) и производят слежение за целью по доплеровской частоте и дальности, определяют угловое рассогласование цели относительно РСН как сумму произведений одноименных квадратурных составляющих суммарного и разностного сигналов на отслеживаемой доплеровской частоте. Полученный сигнал ошибки используют для управления положением РСН моноимпульсной антенны (замыкают следящую систему по углу, стробируемую, как обычно, стробом дальности).
Недостатком способа, прототипа является отсутствие подавления зеркальных видеочастот широкополосного шумового сигнала после квадратурно-фазового детектирования. Ввиду чего составляющие входного спектра широкополосного шумового сигнала на положительных и отрицательных (зеркальных) видеочастотах налагаются друг на друга, соответственно невозможно правильно оценить как квадратурные составляющие суммарного и разностных сигналов, так и сигнал углового рассогласования направления РСН на источник шумовых помех. Кроме того, ввиду отсутствия подавления зеркальных видеочастот шумовая полоса приемника в 2 раза шире оптимальной, соответственно потенциал связи при приеме сигналов цели меньше расчетного на 3 дБ.
Целью изобретения является обеспечение возможности слежения как за сигналом цели, так и за шумовым источником помех при одновременном повышении потенциала связи по сигналу цели за счет подавления на видеочастоте зеркальной шумовой полосы.
Для решения поставленной задачи в способ сопровождения цели [2], включающий:
установку оси РСН моноимпульсной антенны в направлении предполагаемой цели по данным предшествующего обзора;
излучение импульсных когерентных сигналов в заданном направлении;
прием высокочастотных сигналов в интервале между зондирующими;
суммарно-разностное преобразование принимаемых сигналов, супергетеродинное преобразование их на промежуточную частоту;
усиление суммарного и разностного сигналов на промежуточной частоте, преобразование спектров сигналов в область видеочастот посредством квадратурно-фазового детектирования при помощи опорных колебаний fo, частота которых равна промежуточной частоте;
согласованную фильтрацию суммарных и разностных сигналов с получением М-точечных временных реализаций аналитических суммарных v∑ij и разностных vΔij сигналов на каждом j-том периоде повторения,  , в диапазоне дальностей,
, в диапазоне дальностей,  ,
,
многоканальную доплеровскую фильтрацию комплексной огибающей импульсной последовательности суммарного сигнала для каждого элемента дальности в заданном интервале в диапазоне частот Доплера от минус 1/2Тп до 1/2Тп с полосой ΔF и числом каналов N=1/ТпΔF, где Тп - период повторения зондирующих импульсов, ΔF - ширина спектра межпериодных флюктуаций сигналов от истинных целей
Z∑in=F(v∑ij),
где i - номер элемента дальности,
j - номер периода повторения,
n - номер доплеровского фильтра,  ,
,
F - оператор преобразования Фурье;
вычисление амплитуды спектральных составляющих суммарного сигнала
 ,
,
обнаружение сигналов, для которых Р∑in превышает порог обнаружения в априорном диапазоне дальностей,  , МA≤М;
, МA≤М;
поиск сигнала цели с шириной спектра ΔFД меньше порогового Δпорог, включающего вычисление ширины спектров ΔFД суммарного сигнала в порядке убывания их амплитуд по дальности, сравнение текущего вычисленного значения ширины спектра ΔFД с заданным пороговым значением Δпорог, при превышении которого принимают решение об обнаружении ложной цели, циклическое повторение вычисления ширины спектра сигнала, следующего по амплитуде, до нахождения сигнала цели с шириной спектра меньше порогового;
определение номера доплеровского фильтра nц с максимальной амплитудой спектра цели;
определение сигнала рассогласования по частоте, замыкание контура слежения по частоте, подстройка сигналом рассогласования частоты положения nц следящего строба по частоте;
узкополосную фильтрацию с полосой ΔF=1/NTn комплексной огибающей импульсных последовательностей сигналов в суммарном и разностном каналах на отслеживаемой nц доплеровской частоте с получением комплексных спектральных составляющих суммарных Z∑(i, nц) и разностных ZΔ(i, nц) сигналов;
выделение амплитудной огибающей сигналов в суммарном канале
 ;
;
выделение сигнала ошибки по дальности в суммарном канале, замыкание контура сопровождения по дальности и подстройка этим сигналом положения (iц) следящего строба дальности;
вычисление сигнала углового рассогласования γ(iц,nц) РСН относительно направления на цель по результатам вычисления спектральных составляющих суммарного Z∑(iц, nц) и разностного ZΔ(iц, nц) сигналов на отслеживаемой точке сцены дальность - доплеровская частота (iц, nц);
замыкание контура сопровождения по углу по сигналу углового рассогласования γ(iц, nц) с корректировкой положения РСН моноимпульсной антенны;
отличающийся тем, что после квадратурно-фазового детектирования подавляют полосу зеркальных видеочастот, где априорно отсутствует сдвинутый на доплеровскую частоту сигнал цели, полученные действительные суммарно-разностные сигналы оцифровываются с частотой выборки Fв, превышающей полосу частот, занимаемых модулирующим сигналом более чем в два раза;
перед началом поиска сигнала цели после порогового обнаружения определяется число обнаруженных сигналов w; если при циклическом поиске сигнала цели за w циклов не обнаружен сигнал цели, производится:
многоканальная доплеровская фильтрация суммарных сигналов в диапазоне частот от нуля до 1/2Тп на дальностях  , где нет отраженных сигналов с получением комплексных спектров суммарных сигналов Z∑in и амплитуд спектральных составляющих суммарного сигнала ;
, где нет отраженных сигналов с получением комплексных спектров суммарных сигналов Z∑in и амплитуд спектральных составляющих суммарного сигнала ;
пороговое обнаружение сигналов источника шумовых помех по амплитудам Р∑in спектральных составляющих, превысивших порог обнаружения источника шумового сигнала;
нахождение Nэ экстремальных точек (iэ,nэ) с максимальной амплитудой спектральной составляющей Р∑in, с вычислением для них спектральных составляющих разностного сигнала ZΔ(i,n);
вычисление сигнала рассогласования РСН относительно направления на источник шумовых помех γип как среднюю величину угловых рассогласований γэ для Nэ экстремальных точек (iэ,nэ) по квадратурным спектральным составляющим суммарных Z∑(iэ,nэ) и разностных ZΔ(iэ,nэ) сигналов;
замыкание следящей системы по углу с наведением оси антенны по сигналу углового рассогласования РСН антенны на источник шумовых помех;
подавление полосы зеркальных видеочастот производится путем преобразования пары квадратурных видеосигналов в новую пару сигналов, дополнительно сдвинутых друг относительно друга на 90° в полосе частот, занимаемой модуляцией зондирующего сигнала ΔFc, и последующего их сложения;
согласованная фильтрация в каждом периоде повторения выполняется последовательностью операций, включающих М-точечное преобразование Фурье последовательностей комплексных чисел xij=u∑ji+juΔij, действительная часть которых равна оцифрованным выборкам суммарного сигнала u∑ij, а мнимая - выборкам разностного сигнала uΔij, с получением М-точечных спектров Xmj=F(xij),  , m-номер частоты спектральной составляющей, восстановление спектров аналитических суммарных S∑mj и разностных SΔmj сигналов по спектрам Хmj, перемножение спектров аналитических суммарных и разностных сигналов с комплексно сопряженным спектром зондирующего сигнала S*m с получением спектров сжатых сигналов V∑mj=S∑mjS*m и VΔmj=SΔmjS*m, обратное М-точечное преобразование Фурье с получением для каждого j-того периода повторения М-точечных аналитических временных реализаций сжатых суммарных v∑ij и разностных vΔij сигналов.
, m-номер частоты спектральной составляющей, восстановление спектров аналитических суммарных S∑mj и разностных SΔmj сигналов по спектрам Хmj, перемножение спектров аналитических суммарных и разностных сигналов с комплексно сопряженным спектром зондирующего сигнала S*m с получением спектров сжатых сигналов V∑mj=S∑mjS*m и VΔmj=SΔmjS*m, обратное М-точечное преобразование Фурье с получением для каждого j-того периода повторения М-точечных аналитических временных реализаций сжатых суммарных v∑ij и разностных vΔij сигналов.
Согласно предлагаемому способу производится моноимпульсный суммарно-разностный прием отраженных сигналов на выставленном по данным предшествующего обзора направлении. После усиления и преобразования принятых суммарно-разностных сигналов на промежуточную частоту переносят их на видеочастоту посредством квадратурно-фазового детектирования при помощи опорных колебаний, частота которых равна промежуточной частоте. Подавляют полосу зеркальных видеочастот, где априорно отсутствует сдвинутый на доплеровскую частоту сигнал цели путем преобразования квадратурных видеосигналов в новую пару сигналов, дополнительно сдвинутых друг относительно друга на 90° в полосе частот, занимаемой модуляцией зондирующего сигнала ΔFc, и последующего их сложения. Полученные действительные суммарно-разностные сигналы оцифровываются с частотой выборки Fв>2ΔFc и далее подвергаются согласованной фильтрации с получением М-точечных временных реализаций аналитических суммарных v∑ij и разностных vΔij сигналов на каждом j-том периоде повторения,  в диапазоне дальностей
в диапазоне дальностей  , включающим участок априорного нахождения отраженного сигнала и участок, где нет отраженного сигнала.
, включающим участок априорного нахождения отраженного сигнала и участок, где нет отраженного сигнала.
Согласованная фильтрация включает М-точечное преобразование Фурье последовательностей комплексных чисел xij=u∑ij+juΔij, действительная часть которых равна оцифрованным выборкам суммарного сигнала u∑ij, а мнимая равна выборкам разностного сигнала uΔij, с получением М-точечных спектров Хmj=F(xij),  , m-номер частоты спектральной составляющей, восстановление спектров аналитических суммарных S∑mj и разностных SΔmj сигналов по спектрам Xmj [3]:
, m-номер частоты спектральной составляющей, восстановление спектров аналитических суммарных S∑mj и разностных SΔmj сигналов по спектрам Xmj [3]:
Re(S∑mj)=Re[Xmj+XM-m,j]/2, для частот  ,
,
Im(S∑mj)=Im[Xmj-XM-m,j]/2, для частот
Re(SΔmj)=Im[Xmj+XM-m,j]/2, для частот ,
Im(SΔmj)=-Re[Xmj-XM-m,j]/2, для частот ,
Re(S∑0j)=Re(X0j), для частоты m=0
Im(S∑0j)=Re(S∑m/2,j), для частоты m=0
Re(SΔ0j)=Im(X0j), для частоты m=0
Im(SΔ0j)=Re(SΔM/2j), для частоты m=0
S∑mj=SΔmj=0, для частот m≥M/2,
перемножение спектров аналитических суммарных и разностных сигналов с комплексно сопряженным спектром зондирующего сигнала S*m с получением спектров сжатых сигналов:
V∑mj=S∑mjS*m и VΔmj=SΔmjS*m,
обратное М-точечное преобразование Фурье с получением для каждого j-ого периода повторения М-точечных аналитических временных реализаций сжатых суммарных v∑ij и разностных vΔij сигналов,
для каждого i-ого элемента дальности в априорном диапазоне дальностей  , МA≤М, осуществляют многоканальную доплеровскую фильтрацию комплексной огибающей импульсной последовательности суммарного сигнала в диапазоне частот Доплера от минус 1/2 Тп до 1/2 Тп с полосой ΔF и числом каналов N=1/ТпΔF, где Тп - период повторения зондирующих импульсов, ΔF - ширина спектра межпериодных флюктуаций сигналов от истинных целей
, МA≤М, осуществляют многоканальную доплеровскую фильтрацию комплексной огибающей импульсной последовательности суммарного сигнала в диапазоне частот Доплера от минус 1/2 Тп до 1/2 Тп с полосой ΔF и числом каналов N=1/ТпΔF, где Тп - период повторения зондирующих импульсов, ΔF - ширина спектра межпериодных флюктуаций сигналов от истинных целей
Z∑in=F(v∑ij),
где i - номер ячейки дальности,
n - номер доплеровского фильтра,
j - номер периода повторения,
F - оператор преобразования Фурье,
вычисляют амплитуды спектральных составляющих суммарного сигнала
,
формируют порог обнаружения в каждой точке рабочего диапазона дальность - доплеровская частота по среднему уровню помех в скользящем окне по дальности и доплеровской частоте [4, с.107], центром которого является анализируемая точка (i,n)
где 2ki - размер скользящего окна по дальности,
k0 - множитель, зависящий от вероятности правильного обнаружения и вероятности ложной тревоги,
выполняют обнаружение сигналов в рабочем диапазоне дальностей по амплитуде суммарной спектральной составляющей Р∑in, превышающей порог обнаружения Пin, находят число дальностей w, на которых имеется превышение порога обнаружения, вычисляют ширину доплеровских спектров ΔFД обнаруженных суммарных сигналов в порядке убывания их амплитуд по дальности, сравнивают текущее вычисленное значение ширины спектра ΔFД с заданным пороговым значением Δпорог, при превышении которого принимают решение об обнаружении ложной цели, вычисляют число оставшихся для анализа сигналов w:=w-1 и при w>0 циклически повторяют вычисление ширины спектра следующего по амплитуде сигнала до нахождения сигнала цели с шириной спектра меньше порогового Δпорог, определяют номер доплеровского фильтра цели nц по положению максимума спектра сигнала цели, определяют сигнал рассогласования по частоте, замыкают контур слежения по частоте и подстраивают сигналом рассогласования частоты положение nц следящего строба по частоте; осуществляют узкополостную фильтрацию с полосой ΔFф=1/NTп комплексной огибающей импульсных последовательностей сигналов в суммарном и разностном каналах на nц-той отслеживаемой доплеровской частоте, вычисляют амплитудную огибающую сигналов в суммарном канале Р∑inц, вычисляют сигнал ошибки по дальности в суммарном канале, замыкают контур сопровождения по дальности и подстраивают этим сигналом положение (iц) следящего строба дальности, вычисляют сигнал углового рассогласования γ(iц,nц) РСН относительно направления на цель по результатам вычисления спектральных составляющих суммарного и разностного сигналов на отслеживаемой точке дальность - частота (iц,nц)
 ,
,
замыкают контур сопровождения по углу по сигналу углового рассогласования γц с корректировкой положения РСН моноимпульсной антенны.
Если при циклическом поиске координат цели в априорном диапазоне дальностей за w циклов не обнаружен сигнал цели, производится:
многоканальная доплеровская фильтрация суммарных сигналов в диапазоне частот от нуля до 1/2Тп на дальностях, где нет отраженных сигналов, , с получением комплексных спектров суммарных сигналов ZΣin и амплитуд спектральных составляющих суммарного сигнала ;
пороговое обнаружение сигналов от источника шумовых помех по превышению амплитуды спектральной составляющей Р∑in шумового порога обнаружения;
нахождение среди сигналов, превысивших шумовой порог обнаружения, Nэ экстремальных сигналов, с максимальной амплитудой спектра Р∑in и их координаты (iэ,nэ),
вычисление для Nэ найденных точек спектральных составляющих разностного сигнала ZΔ(iэ,nэ),
вычисление сигналов углового рассогласования РСН γk для Nэ экстремальных точек,  , по квадратурным спектральным составляющим суммарного Z∑k и разностного ZΔk сигналов
, по квадратурным спектральным составляющим суммарного Z∑k и разностного ZΔk сигналов
 ,
,
вычисление углового рассогласования РСН на источник шумового сигнала как усредненного значения угловых рассогласований экстремальных точек
 ,
,
замыкается следящая система по углу по сигналу углового рассогласования γИП с коррекцией положения моноимпульсной антенны на источник шумовых помех.
Сущность изобретения поясняется дальнейшим описанием и чертежами моноимпульсной РЛС, реализующей данный способ: Прототипом для нее, как и для заявляемого способа, является РЛС, приведенная в [2].
Фиг.1 - структурная схема моноимпульсной РЛС;
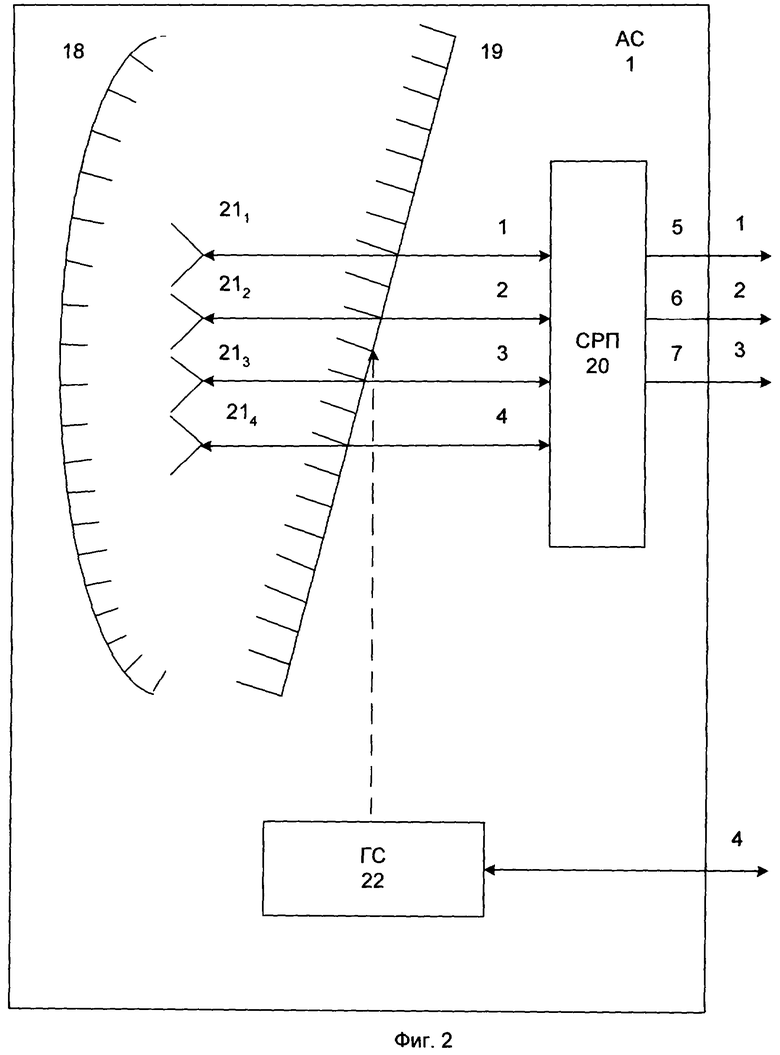
Фиг.2 - структурная схема антенной системы 1;
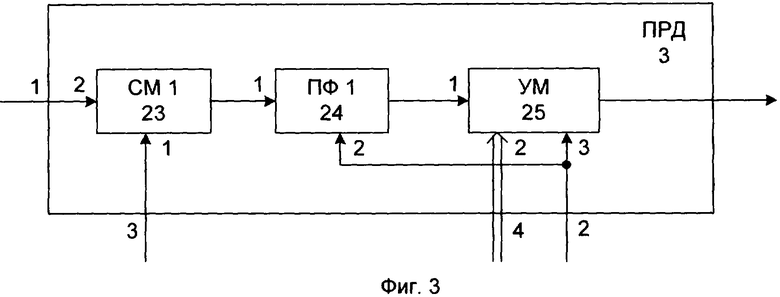
Фиг.3 - структурная схема передатчика 3;
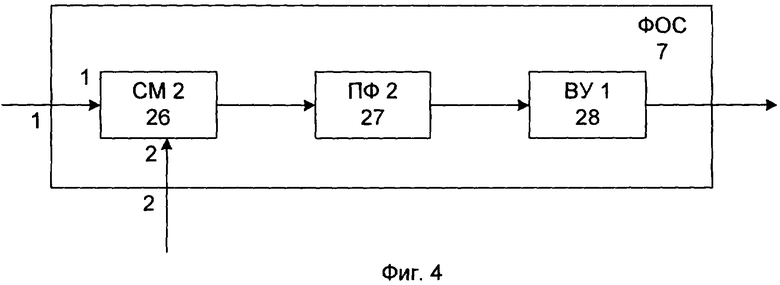
Фиг.4 - структурная схема формирователя опорного сигнала 7;
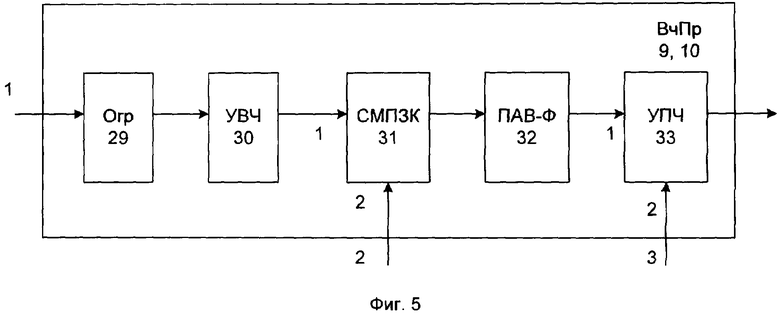
Фиг.5 - структурная схема высокочастотного приемника 9 (10);
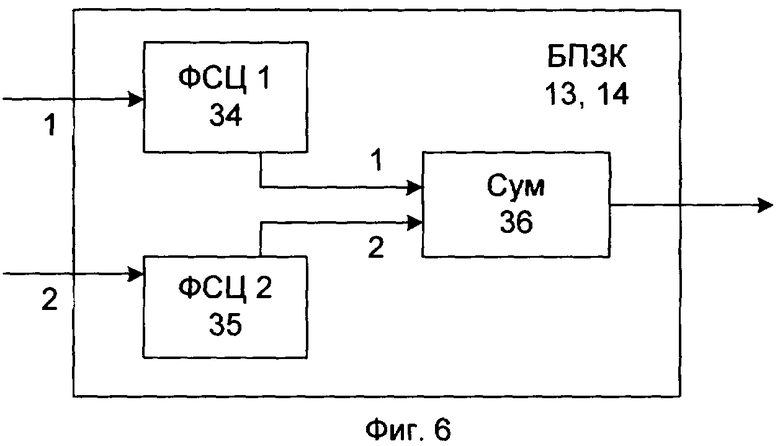
Фиг.6 - структурная схема блока подавления зеркального канала 13 (14);
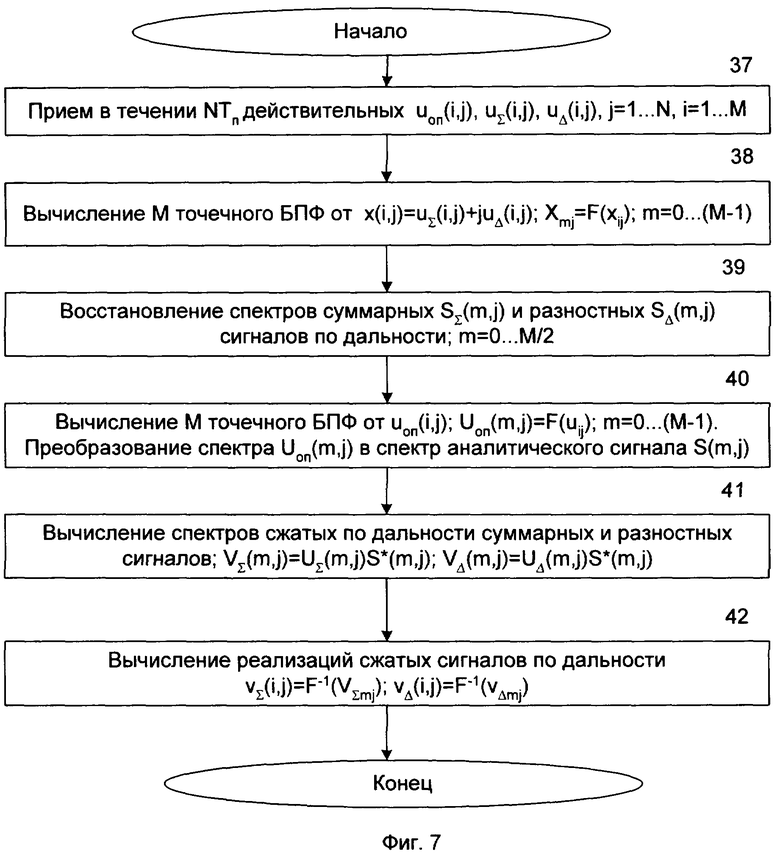
Фиг.7 - алгоритм работы БЦВМ 17 по формированию сжатых сигналов;
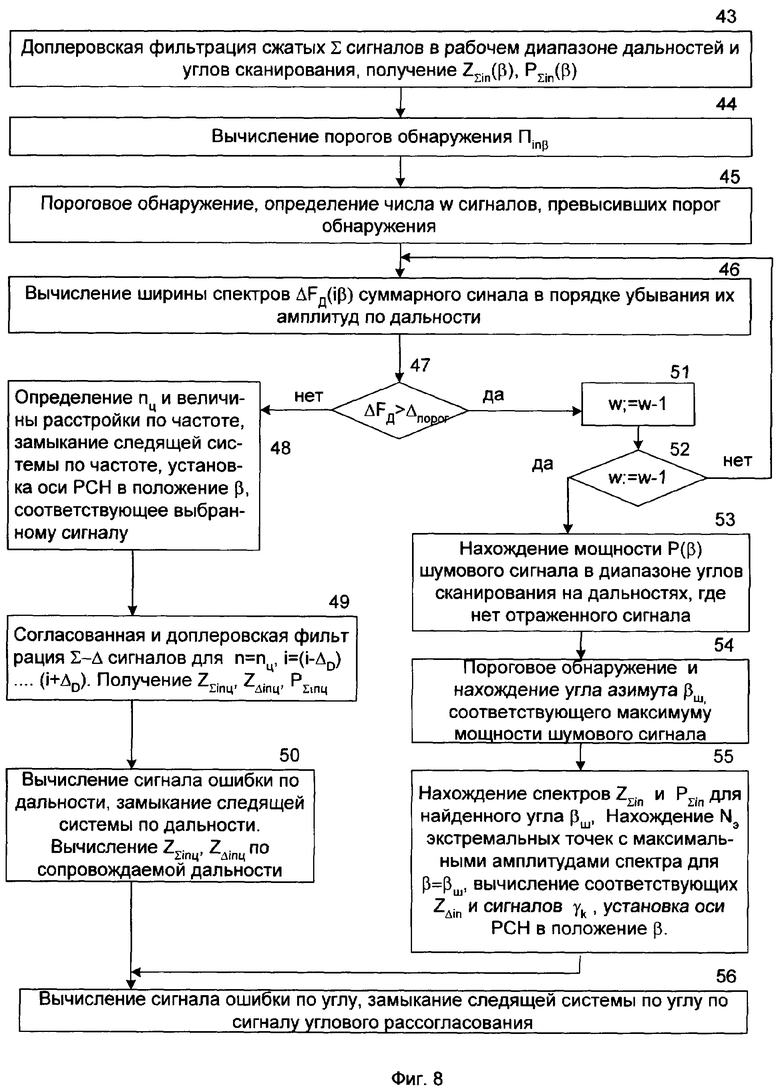
Фиг.8 - алгоритм работы БЦВМ 17 по выбору цели на сопровождение, переходу на сопровождение и работы при сопровождении.
На фиг.1 представлена структурная схема моноимпульсной РЛС, где приняты следующие обозначения:
1 - моноимпульсная антенная система (АС), вариант которой приведен на фиг.2;
2 - антенный переключатель (АП), может быть выполнен в виде трехплечевого ферритового Y-циркулятора;
3 - передатчик (ПРД), вариант передатчика приведен на фиг.3;
4 - возбудитель (В), совокупность кварцованного генератора с умножителями частот, выполняемых по схеме умножителей частот, в том числе с применением петель цифровых схем фазовой автоподстройки частоты (ФАПЧ) [15, с.35, рис.11; 16, с.63, рис.3.2];
5 - синхронизатор (СНХ) представляет совокупность преобразователей код - период, код - длительность и цифроаналоговых преобразователей;
6 - формирователь модулированного сигнала (ФМС), в качестве формирователя может быть генератор, управляемый напряжением по частоте;
7 - формирователь опорного сигнала (ФОС), структурная схема которого приведена на фиг.4;
8 - переключатель (П), в качестве переключателя может быть использован однополюсный переключатель на два положения [9], к свободному выходу переключателя подключена согласованная нагрузка, которая не показана;
9 - высокочастотный приемник суммарного сигнала (ВчПр-∑), структура приемника приведена на фиг.5;
10 - высокочастотный приемник разностного сигнала (ВчПр-Δ), аналогичен высокочастотному приемнику суммарного канала 9;
11 - квадратурно-фазовый детектор суммарного сигнала (КвФд-∑), примером может быть квадратурный смеситель [7];
12 - квадратурно-фазовый детектор разностного сигнала (КвФд-Δ), аналогичен квдратурно-фазовому детектору 11;
13 - блок подавления зеркального канала суммарного канала (БПЗК-∑), структурная схема блока приведена на фиг.6;
14 - блок подавления зеркального канала разностного канала (БПЗК-Δ), аналогичен блоку 13;
15 - видеоусилитель суммарного канала (ВУ-∑);
16 - видеоусилитель разностного канала (ВУ-Δ);
17 - бортовая вычислительная машина (БЦВМ), в качестве варианта может быть БЦВМ [12].
На схеме фиг.1 радиолокационная станция содержит последовательно соединенные возбудитель 4, передатчик 3, антенный переключатель 2, антенную моноимпульсную систему 1, второй выход возбудителя 4 через последовательно соединенные синхронизатор 5, формирователь модулированного сигнала 6 и формирователь опорного сигнала 7 подключен к третьему входу бортовой вычислительной машины (БЦВМ) 17, третий выход антенного переключателя 2 через последовательно соединенные высокочастотный приемник суммарного сигнала 9, квадратурный фазовый детектор суммарного сигнала 11, блок подавления зеркального канала суммарного канала 13 и видеоусилитель суммарного сигнала 15 подключен к четвертому входу БЦВМ 17, выход переключателя 8 через последовательно соединенные высокочастотный приемник разностного сигнала 10, квадратурный фазовый детектор разностного сигнала 12, блок подавления зеркального канала разностного канала 14 и видеоусилитель разностного сигнала 16 подключен к пятому входу БЦВМ 17, первый вход-выход БЦВМ 17 соединен с третьими входами высокочастотных приемников суммарного 9 и разностного 10 каналов, третьим входом переключателя 8, четвертым входом-выходом моноимпульсной антенной системы 1, четвертым входом передатчика 3, входу возбудителя 4, и первым входом синхронизатора 5, второй и третий выходы моноимпульсной антенной системы 1 соединены с первым и вторым входами переключателя 8, первый выход возбудителя 4 соединен с вторыми входами высокочастотных приемников суммарного 9 и разностного 10 сигналов, выход формирователя модулированного сигнала 6 соединен с третьим входом передатчика 3, второй выход синхронизатора 5 соединен с одноименными входами формирователя модулированного сигнала 6 и передатчика 3, третий выход возбудителя 4 соединен с первым входом формирователя опорного сигнала 7, первыми входами квадратурных фазовых детекторов 11 и 12, третий выход синхронизатора 5 соединен с вторыми входами видеоусилителей 15 и 16, вторые выходы квадратурных фазовых детекторов 11 и 12 соединены с одноименными входами блоков подавления зеркального канала 13 и 14 соответственно, четвертый выход синхронизатора 5 соединен с шестым входом БЦВМ 17, второй вход - выход которой является входом - выходом РЛС.
На Фиг.2 представлен вариант моноимпульсной антенной системы 2 на базе двухзеркальной антенны [10], где приняты следующие обозначения:
18 - параболическое зеркало;
19 - твистрефлектор;
20 - суммарно-разностный преобразователь (СРП), который может быть построен на основе волноводных Т-мостов;
211...214 - облучатели;
22 - гиростабилизатор (ГС), примером которого может быть гиростабилизатор [11].
Моноимпульсная антенная система 1, изобаженная на фиг.2, содержит параболическое зеркало 18, подвижное зеркало (твистрефлектор) 19, механически соединенное с платформой гиростабилизатора 22, четыре облучателя 211...214 моноимпульсной антенной системы 1 соединены с одноименными входами-выходами суммарно-разностного преобразователя 20, пятый вход-выход которого является первым суммарным входом-выходом моноимпульсной антенной системы 1, шестой и седьмой выходы суммарно-разностного преобразователя 20 являются вторым (азимутальным), третьим (угломестным) разностными выходами моноимпульсной антенной системы 1 соответственно, информационный вход-выход гиростабилизатора 22 является четвертым входом-выходом моноимпульсной антенной системы 1.
На фиг.3 приведена структурная схема передатчика 3, на которой приняты следующие обозначения:
23 - первый смеситель (СМ1) может быть выполнен как балансный смеситель по схеме [13, с.144];
24 - первый полосовой фильтр (ПФ1);
25 - усилитель мощности (УМ) может быть реализован в зависимости от требуемой мощности и полосы усиливаемых частот на основе амплитрона, лампы бегущей волны или полупроводникового прибора [13, с.19-20, 25, 42-46].
В схеме передатчика 3, изображенного на фиг.3, последовательно соединены первый смеситель 23, первый полосовой фильтр 24 и усилитель мощности 25, выход которого является выходом передатчика 3, первый вход первого смесителя 23 является третьим входом передатчика 3, второй вход усилителя мощности 25 является четвертым входом передатчика 3, второй вход передатчика 3 соединен с вторым входом первого полосового фильтра 24 и третьим входом усилителя мощности 25, первый вход передатчика 3 является вторым входом первого смесителя 23.
На фиг.4 приведена структурная схема формирователя опорного сигнала 8, на которой приняты следующие обозначения:
26 - второй смеситель (СМ2);
27 - второй полосовой фильтр (ПФ2);
28 - первый видеоусилитель (ВУ1).
На схеме формирователя опорного сигнала 7, изображенного на фиг.4, выход второго смесителя 26 через последовательно соединенные второй полосовой фильтр 27 и первый видеоусилитель 28 соединен с выходом формирователя опорного сигнала 7, первый и второй входы второго смесителя 26 являются одноименными входами формирователя опорного сигнала 7.
На фиг.5 приведена структурная схема высокочастотных приемников (ВчПр) 9 и 10, где приняты следующие обозначения:
29 - ограничитель (Огр);
30 - усилитель высокой частоты (УВЧ);
31 - смеситель с подавлением зеркального канала (СМПЗК), примером смесителя является смеситель, приведенный в [13, рис.36 с.144];
32 - фильтр на поверхностных акустических волнах (ПАВ-Ф), примером которого может быть фильтр, приведенный в [8];
33 - усилитель промежуточной частоты (УПЧ).
Примером модуля, в котором объединены ограничитель 29, усилитель высокой частоты 30, смеситель с подавлением зеркального канала 31, является модуль [14].
На схеме высокочастотного приемника 9, изображенного на фиг.5, последовательно соединены ограничитель 29, усилитель высокой частоты 30, смеситель с подавлением зеркального канала 31, ПАВ-фильтр 32 и усилитель промежуточной частоты (УПЧ) 33, выход которого является выходом высокочастотного приемника 9, вход ограничителя 29 является первым входом высокочастотного приемника 9, второй вход смесителя с подавлением зеркального канала 31 является вторым входом высокочастотного приемника 9, второй вход УПЧ 33 является третьим входом высокочастотного приемника 9.
На фиг.6 приведена структурная схема блоков подавления зеркального канала 13, 14, на которой приняты следующие обозначения:
34 и 35 - первая и вторая фазосдвигающие цепи (ФСЦ 1 и ФСЦ 2),
36 - сумматор (Сум).
На схеме блоков подавления зеркального канала 13 (14), изображенной на фиг.6, выходы первой 34 и второй 35 фазосдвигающих цепей соединены с первым и вторым входами сумматора 36 соответственно, выход которого является выходом блока подавления зеркального канала 13, первый и второй входы блока подавления зеркального канала 13 являются входами первой 34 и второй 35 фазосдвигающих цепей соответственно.
В соответствии со схемами фиг.1-8 моноимпульсная РЛС, реализующая предлагаемый способ, работает следующим образом.
В исходном состоянии РЛС находится в режиме ожидания, при этом включено питание минимально необходимого числа блоков РЛС, включая БЦВМ 17. Активизация работы РЛС производится по командам от внешней системы управления по командам включения с выдачей соответствующих полетных заданий, приходящих на второй вход БЦВМ 17. В обоих случаях БЦВМ 17 включает питание всех блоков РЛС кроме выходного усилителя мощности 25 в передатчике 3 (фиг.3). Для этого на четвертый вход передатчика 3 с БЦВМ 17 приходит соответствующая команда. Далее БЦВМ 17 проводит расчеты параметров излучения (периода повторения, длительности зондирующего импульса, закона внутриимпульсной модуляции, начальных значений уровня усиления сигналов в высокочастотных приемниках (9 и 10) и в видеоусилителях (15 и 16) в зависимости от априорной дальности до заданной цели и ее отражающих характеристик), после этого БЦВМ 17 через управляющую шину с первого входа - выхода производит ввод расчетных значений настройки в блоки РЛС, включающий:
установку начального усиления сигнала в высокочастотных приемниках суммарного 9 и разностного 10 сигналов (сигнал АРУ ВЧ),
подключение азимутального разностного сигнала с второго выхода моноимпульсной антенной системы 1 через переключатель 8 к первому входу высокочастотного приемника разностного сигнала 10,
введение в моноимпульсную антенную систему 1 (в дальнейшем по тексту антенная система 1) по четвертому входу кодов скоростей оси визирования по азимуту и углу места. Данные коды транслируются на гиростабилизатор 22 (фиг.2), с помощью которого ось визирования антенной системы направляется в требуемое начало сектора сканирования. Текущие координаты оси антенной системы по азимуту и углу места (ε,β) выдаются с гиростабилизатора 22 на БЦВМ 17 по ее запросу с четвертого входа - выхода антенной системы 1. При достижении заданного начала сектора сканирования (ε0,β0) БЦВМ 17 через гиростабилизатор 22 останавливает ось антенной системы 1,
введение в возбудитель 4 кодов установки частоты гетеродина fг на первом выходе и опорной частоты fo на третьем. Частота fo равна промежуточной fпр и используется в квадратурно-фазовых детекторах 11 и 12 при переносе принятых суммарных и разностных сигналов с промежуточной частоты на видеочастоту,
введение в синхронизатор 5 параметров импульса амплитудной модуляции зондирующих импульсов (периода повторения Тп и длительности τ на втором выходе синхронизатора 5), случайного кода внутриимпульсной частотной манипуляции зондирующего сигнала, транслируемого через цифроаналоговый преобразователь в виде напряжения UЧМ на первый вход формирователя модулированного сигнала 6, кода регулировки усиления сигнала в видеоусилителях 15 и 16, преобразуемого в аналог (сигнал АРУ ВУ), выдаваемого с третьего выхода синхронизатора 5.
После подготовительных операций возбудитель 4 формирует опорную частоту fo, равную промежуточной частоте, поступающую на квадратурно-фазовые детекторы 11, 12, частоту гетеродина fг, поступающую на передатчик 3 и высокочастотные приемники суммарного 9 и разностного 10 сигнала, кварцованную частоту fкв на втором выходе, поступающую на синхронизатор 5. Частота fкв используется в синхронизаторе 5 при формировании импульсов амплитудной модуляции UAM цифровым способом. Импульсы амплитудной модуляции с второго выхода синхронизатора 5 поступают на вторые входы формирователя модулированного сигнала 6 и передатчика 3 для модуляции длительности формируемых ими сигналов. На четвертом выходе синхронизатора 5 формируется кварцованная частота выборки fв, используемая в БЦВМ 17 для синхронизации моментов выборки, принятых и преобразованных на видеочастоту сигналов с выходов видеоусилителей 15 и 16. При наличии импульсов амплитудной и частотной модуляции на первом и втором выходах синхронизатора 5 формирователь модулированного сигнала 6 формирует частотно-манипулированный сигнал на промежуточной частоте fпр приемника, поступающий на третий вход передатчика 3.
Последующая работа РЛС включает разведку, выбор цели, захват и сопровождение выбранной цели. БЦВМ 17 по заложенной программе включает режим сканирования антенной системы 1 по азимуту в заданном угловом секторе. Для чего БЦВМ 17 вводит в гиростабилизатор 22 антенной системы 1 управляющие сигналы по знаку и скорости сканирования, включает передатчик 3, подачей команды включения на его четвертый вход. С этого момента на выходе передатчика (фиг.3) формируются мощный сигнал на несущей частоте, полученной смешиванием частоты гетеродина, приходящей на первый вход первого смесителя 23, с частотно-манипулированным импульсом, приходящим с формирователя модулированного сигнала 6 на первый вход первого смесителя 23 на промежуточной частоте. Частота настройки первого полосового фильтра 24 (его затухание на несущей частоте) управляется импульсом амплитудной модуляции, приходящим с синхронизатора 5 на второй вход первого полосового фильтра 24, при этом в паузах между зондирующими импульсами его затухание максимально, обеспечивая подавление непрерывного паразитного сигнала на выходе усилителя мощности 25 до допустимого уровня. Выходной сигнал передатчика 3 через антенный переключатель 2 поступает на антенную систему 1 и излучается в сканируемом направлении. Антенная система 1 принимает отраженный сигнал и формирует суммарный и два разностных (азимутальный на втором выходе и угломестный на третьем выходе). В зависимости от измеряемой угловой координаты (азимутальной или угломестной) по команде БЦВМ 17, вводимой на переключатель 8 через третий вход, на высокочастотный приемник разностного канала 10 с антенной системы 1 приходит либо азимутальный, либо угломестный разностный сигнал. Суммарный сигнал с первого выхода антенной системы 1 проходит через антенный переключатель 2 на высокочастотный приемник суммарного сигнала 9. Дальнейшая обработка суммарных и разностных сигналов до поступления их на БЦВМ 17 проводится аналогичными каналами, состоящими из высокочастотных приемников 9 и 10, квадратурно-фазовых детекторов 11 и 12, блоков подавления зеркального канала 13 и 14 и видеоусилителей 15 и 16. При этом в высокочастотных приемниках 9 и 10 (фиг.5) выполняется преобразование принятых сигналов на промежуточную частоту и усиление, в квадратурно-фазовых детекторах 11 и 12 получают квадратурные суммарные и разностные сигналы на видеочастоте, в блоках подавления зеркального канала 13 и 14 (фиг.6) получают действительные однополостные сигналы, которые далее усиливаются в видеоусилителях 15 и 16. Частота гетеродина fг на вторые входы высокочастотных приемников 9 и 10 приходит с первого выхода возбудителя 4. Для получения квадратур принятого сигнала на видеочастоте на первые входы квадратурно-фазовых детекторов 11 и 12 с возбудителя 4 приходит опорная частота fo.Уровень усиления однополостных сигналов в видеоусилителях 15 и 16, как и в высокочастотных приемниках 9 и 10, регулируется БЦВМ 17 по результатам анализа уровня суммарного видеосигнала на выходе видеоусилителя 15. При этом код регулировки видеоусилителей 15 и 16 подается БЦВМ 17 на синхронизатор 5, который преобразует его в аналоговое напряжение АРУ ВУ, поступающее на вторые входы видеоусилителей 15 и 16. Выходные суммарные и разностные видеосигналы с выходов видеоусилителей суммарного 15 и разностного 16 канала поступают на четвертый и пятый аналоговые входы БЦВМ 17, где оцифровываются, запоминаются и обрабатываются.
Обработка сигналов, полученных во время сканирования оси антенной системы в рабочем секторе углов, включает для текущего положения оси антенной системы согласованную фильтрацию сигналов на каждом периоде повторения и последующую многоканальную доплеровскую для каждого разрешаемого элемента дальности в заданном априорном диапазоне дальностей. Алгоритм согласованной фильтрации суммарного и разностного сигналов приведен фиг.7. Особенностью внутрипериодной согласованной фильтрации является то, что в каждом периоде в качестве опорного uоп(i,j) используется сигнал с выхода формирователя модуляции сигнала 6, прошедший через формирователь опорного сигнала 7 на третий аналоговый вход БЦВМ 17, оцифрованный и запомненный. При этом спектр опорного аналитического сигнала S(m,j) получают с помощью М точечного быстрого преобразования Фурье (БПФ) от uоп(i,j) в соответствии с выражением:
 ,
,
где F - оператор преобразования Фурье.
Алгоритм последующего поиска сигнала, выбора сигнала цели, его захвата и сопровождения приведен на фиг.8. Сначала (поз.43 фиг.8) производится доплеровская фильтрация сжатых суммарных сигналов v∑ij(β) в рабочем диапазоне дальностей  и углов сканирования β с получением комплексных спектров Z∑in(β) и амплитуд Р∑in(β). Далее для каждого положения β вычисляется порог обнаружения Пinβ (поз.44 фиг.8) по среднему уровню помех в скользящем окне по дальности, центром которого является анализируемая точка (i,n,β) [4, с.107]
и углов сканирования β с получением комплексных спектров Z∑in(β) и амплитуд Р∑in(β). Далее для каждого положения β вычисляется порог обнаружения Пinβ (поз.44 фиг.8) по среднему уровню помех в скользящем окне по дальности, центром которого является анализируемая точка (i,n,β) [4, с.107]
 ,
,
где 2ki - размер скользящего окна,
k0 - множитель, зависящий от вероятности правильного обнаружения и вероятности ложной тревоги.
Использование порога Пinβ позволяет определить число сигналов w, превышающих порог обнаружения. Для w сигналов, превысивших порог обнаружения, вычисляется ширина спектра ΔFД(i,β) суммарного сигнала в порядке убывания амплитуд по дальности (поз.46, 47, 51, 52 фиг.8) до нахождения сигнала с шириной полосы ΔFд меньшей порога Δпорог (поз.47 фиг.8), после чего работа РЛС происходит по ветви от поз.48 до поз.50 и 56, соответствующей обнаружению цели с захватом сигнала по доплеровской частоте, дальности и углу. Если из w сигналов, превысивших порог обнаружения Пinβ, сигнал цели не найден (ΔFд<Δпорог), РЛС перестраивается на обнаружение, захват и сопровождение шумового источника помех (поз.53-55 фиг.8). При этом последовательно на дальностях, где нет отраженного сигнала, вычисляется развертка мощности шумового сигнала по углу азимута Р(β):
 ,
,
где Мш - число дальностей, на которых анализируется шумовой сигнал, находится угловое положение βш максимума мощности шумового сигнала и сравнивается Р(βш) с порогом обнаружения. Если порог превышен, находят Nэ экстремальных точек (iэ, jэ) для азимута βш, спектры суммарных Z∑(iэ,nэ,βш) и разностных сигналов ZΔ(iэ,nэ,βш), после этого вычисляют γk.
Информация, получаемая на поз.50 или 55 фиг.8, используется в поз.56 фиг.8 для вычисления сигнала ошибки по углу (либо γц либо γИП) и замыкания системы сопровождения по углу по сигналу углового рассогласования.
Переключением разностных сигналов по азимуту и углу места через переключатель 8 на входе высокочастотного приемника разностного сигнала 10 по командам БЦВМ 17 обеспечивается возможность одновременного слежения за обоими угловыми координатами цели (εц,βц) и их угловыми скоростями (ωεц, ωβц). Слежение по дальности и доплеровской частоте сигнала цели обеспечивает измерение как текущей дальности до цели, так и радиальной скорости цели (Dц,VDц). Для источника шумового сигнала БЦВМ 17 при слежении обеспечивает измерение как угловых координат (εИП, βИП), так и угловых скоростей (ωε ИП, ωβ ИП).
Логика работы РЛС в боевом режиме может быть изменена на чисто пассивный по источнику шумовых помех или активный только по отражающей цели, в том числе с перестройкой несущей частоты от пачки к пачке, что обеспечивается возможностями синтеза частот сигнала в возбудителе 4 на современной элементной базе.
Результаты измерений БЦВМ 17 выдает в систему управления по ее запросу по отдельной информационной шине, подключенной к ее второму выходу.
На фиг.2 приведен вариант антенной системы 1 на базе двух зеркальной антенны Кассегрена, включающей параболическое зеркало 18, четыре рупорных облучателя 211...214, твистрефлектор 19, механически связанный с гиростабилизатором 22. Подвод зондирующего сигнала передатчика к рупопорным облучателям 211...214 и преобразование принятого четырьмя лучами двух зеркальной антенны сигнала в суммарные и разностные сигналы производится суммарно-разностным преобразователем 20. При этом разностные сигналы по азимуту и углу места при приеме формируются на шестом и седьмом выходах суммарно-разностного преобразователя 20 соответственно, суммарный - на пятом. Направление излучения-приема определяется наклоном твистрефлектора 19, механически выставляемого гиростабилизатором 22.
Структурная схема формирователя опорного сигнала 6 приведена на фиг.4. Здесь частотно-манипулированный сигнал промежуточной частоты поступает на второй вход второго смесителя 26, где с помощью сигнала промежуточной частоты fпр с четвертого выхода возбудителя 4 переносится на видеочастоту, далее последовательно фильтруется вторым полосовым фильтром 27 и усиливается первым видеоусилителем 28, являющимся выходным устройством формирователя опорного канала 6.
Вариантом высокочастотных приемников 9 и 10 является приемник, изображенный на фиг.5. Здесь через последовательно соединенные ограничитель 29 и усилитель высокочастотного сигнала 30 принятый сигнал поступает на смеситель с подавлением зеркального канала 31. Гетеродинная частота приходит на второй вход смесителя 31 с возбудителя 4. Преобразованный на промежуточную частоту сигнал через ПАВ-фильтр и усилитель промежуточной частоты 33 поступает на выход высокочастотного приемника 9 (10).
Вариант блока подавления зеркального канала 13 (14) на видеочастоте приведен на фиг.6. Здесь первая и вторая фазосдвигающие цепи 34 и 35 могут быть выполнены на базе схем с равномерной амплитудно-частотной характеристикой, фазочастотные характеристики которых во всем диапазоне частот имеют относительный сдвиг 90 град. [6, с.51, рис.2].
Преимуществом предлагаемого способа перед прототипом является: обеспечение возможности слежения РЛС как за целями-отражателями, так и за источниками шумовых помех, это позволяет в зависимости от помеховой обстановки и полетного задания наводить ЛА либо на цель, либо на источник шумовых помех, соответственно повысить боевые возможности ЛА,
повышение потенциала связи на 3 дБ за счет подавления зеркального видеочастотного канала, соответственно уменьшения шумовой полосы,
работа схем сжатия суммарных и разностных каналов производится по оцифрованному действительному сигналу (одной квадратурной составляющей), а не квадратурному, состоящему из двух составляющих, при этом требования к частоте выборки минимальны (Fв≥2ΔFc), требования к идентичности амплитудно-частотных и фазочастотных характеристик видеоусилителей, стоящих после квадратурно-фазового детектирования перед АЦП, снимаются (не требуется квадратурно-фазовый детектор и второй видеоусилитель), ортогональность квадратур сжатых сигналов обеспечивается чисто цифровой обработкой без повышения требований к числу операций и быстродействию АЦП,
сокращение числа операций при сжатии суммарных и разностных сигналов за счет выполнения свертки принятых сигналов с опорным в частотной области, где спектр принятых суммарных и разностных сигналов вычисляется одним БПФ, вместо двух, при этом восстанавливаются соответствующие им спектры аналитических сигналов.
Предлагаемое устройство моноимпульсной РЛС, реализующее указанный способ, дополнительно к тому, что позволяет способ, обеспечивает:
повышение потенциала связи на 3 дБ за счет подавления зеркальных каналов при переносе принятых суммарных и разностных сигналов на промежуточную частоту;
защиту приемника от перегрузки как зондирующим сигналом, так и мощных организованных помех за счет ограничения принятого сигнала на несущей частоте;
снижение требований к когерентности зондирующих сигналов за счет переноса каждого зондирующего сигнала на видеочастоту, оцифровки и использования в качестве опорного.
Пользуясь сведениями, представленными в материалах заявки, предлагаемую РЛС можно изготовить в производстве, используя известные материалы, элементы, узлы и технологию, применять для обнаружения, сопровождения и измерения координат как реальных отражающих целей, так и источников шумовых помех, что доказывает промышленную применимость изобретения.
В соответствии с материалами заявки был изготовлен опытный образец устройства, испытания которого подтвердили достижение указанного технического эффекта.
ЛИТЕРАТУРА
1. Патент России №2255349 от 17.02.2004, кл. G01S 3/14. Устройство формирования ошибки при приеме шумового сигнала
2. Патент России №2117960 от 20.08.1998, кл. G01S 13/34. Способ сопровождения цели моноимпульсной радиолокационной станцией.
3. Введение в цифровую фильтрацию, под ред. Р.Богнера и А.Констанидиса. - М.: Мир 1976 г. (с.-128-131).
4. Защита радиолокационных систем от помех. Состояние и тенденции развития, под ред. А.И.Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2003 г. (с.107).
5. Резонансный ограничитель СВЧ-мощности на полупроводниковых диодах. М.: Радиотехника 1987 г., №10.
6. Квадратурная схема на операционных усилителях. - М.: Электроника, 1975 г., №17 (с.50, 51).
7. Квадратурный смеситель LT 5516 фирма Linear Technologis.
8. ПАВ-фильтры типа АЕ 455 Н 804. Проспект фирмы АЭК «Дизайн», г.Санкт-Петербург.
9. Однополосный переключатель на 2 положения SW-338 фирмы МА-СОМ.
10. М.С.Жук, Ю.Б.Молочков. Проектирование линзовых, сканирующих широкополосных антенн и фидерных устройств. - М.: Энергия, 1973 г. (с.82, рис.2-7).
11. Гиростабилизированный привод антенной системы ГС-26, разработки ОАО АНПП «Темп-Авиа».
12. Бортовая вычислительная машина ВБ-480-01. Руководство по эксплуатации НКШР.466535.020 РЭ.
13. Справочник по радиолокации под ред. М.: Сколник, т.3. - М.: Советское Радио, 1979 г. (с.19...52, 103...107, 144, рис.36).
14. Приемный модуль СВЧ «Опара», разработки ЗАО «Салют 25», г.Нижний Новгород.
15. Л.А.Белов. Синтезаторы частот и сигналов (сер. «Конспекты лекций по радиотехническим дисциплинам, вып.9». - Сайнс-Пресс, 2002 г. (с.35, рис.11).
16. В.Рыжков, Попов В.Н. Синтезаторы частоты в технике радиосвязи. - М.: Радио и связь, 1991 г. (с.63, рис.3.2).
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ НЕПОДВИЖНЫХ ОБЪЕКТОВ С ПОМОЩЬЮ ШУМОВОГО СИГНАЛА И ШУМОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, РЕАЛИЗУЮЩАЯ ДАННЫЙ СПОСОБ | 2024 |
|
RU2831136C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| СПОСОБ РАДИОЛОКАЦИИ И РАДИОЛОКАТОР С ДОПЛЕРОВСКИМ ПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2580507C2 |
| РАДИОЛОКАТОР С НЕПРЕРЫВНЫМ ШУМОВЫМ СИГНАЛОМ И СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЯЕМЫХ ДАЛЬНОСТЕЙ В РАДИОЛОКАТОРЕ С НЕПРЕРЫВНЫМ СИГНАЛОМ | 2015 |
|
RU2589036C1 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| МОНОИМПУЛЬСНАЯ РЛС МИЛЛИМЕТРОВОГО ДИАПАЗОНА | 2015 |
|
RU2600109C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
Заявленное изобретение относится к радиолокационной технике и может быть использовано в когерентных импульсных РЛС, использующих сложные сигналы и моноимпульсный принцип пеленгации, предназначенных измерять как координаты отражающей цели, так и угловое положение источников шумовой помехи. Достигаемым техническим результатом изобретения является обеспечение возможности моноимпульсной РЛС следить как за сигналом цели, так и за шумовым источником помех при одновременном повышении потенциала связи по сигналу цели. Указанный результат достигается за счет того, что после квадратурно-фазового детектирования суммарных и разностных сигналов производится подавление видеочастот, где априорно отсутствует сдвинутый на доплеровскую частоту сигнал цели (зеркальных видеочастот). Подавление производится за счет пропускания квадратур входного видеосигнала через соответствующие фазосдвигающие цепи с единичным усилением, фазочастотные характеристики которых в рабочем диапазоне частот имеют сдвиг относительно друг друга 90 град., и суммирования полученных сигналов. 2 н.и 3 з.п. ф-лы, 8 ил.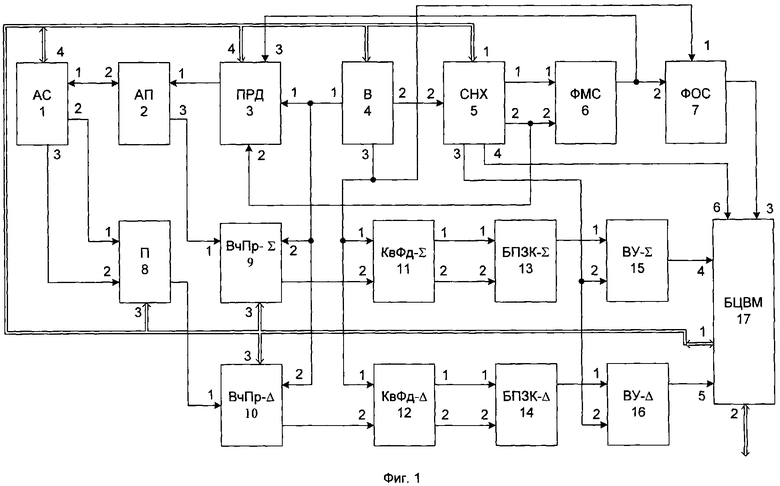
Способ сопровождения цели в моноимпульсной радиолокационной станции (РЛС), включающий установку оси равносигнального направления (РСН) моноимпульсной антенны в направлении предполагаемой цели по данным предшествующего обзора; излучение импульсных когерентных сигналов в заданном направлении; прием высокочастотных сигналов в интервале между зондирующими; суммарно-разностное преобразование принимаемых сигналов, супергетеродинное преобразование их на промежуточную частоту; усиление суммарного и разностного сигналов на промежуточной частоте; преобразование спектров сигналов в область видеочастот посредством квадратурно-фазового детектирования при помощи опорных колебаний fo, частота которых равна промежуточной частоте; согласованную фильтрацию суммарных и разностных сигналов с получением М-точечных временных реализаций аналитических суммарных vΣij и разностных vΔij сигналов на каждом j-м периоде повторения,  , в диапазоне дальностей,
, в диапазоне дальностей,  , многоканальную доплеровскую фильтрацию комплексной огибающей импульсной последовательности суммарного сигнала для каждого элемента дальности в заданном интервале в диапазоне частот Доплера от минус 1/2Тп до 1/2Тп с полосой ΔF и числом каналов N=1/TпΔF, где Тп - период повторения зондирующих импульсов, ΔF - ширина спектра межпериодных флюктуаций сигналов от истинных целей ZΣin=F(vΣij), где i - номер элемента дальности, j - номер периода повторения, n - номер доплеровского фильтра, , F - оператор преобразования Фурье; вычисление амплитуды спектральных составляющих суммарного сигнала
, многоканальную доплеровскую фильтрацию комплексной огибающей импульсной последовательности суммарного сигнала для каждого элемента дальности в заданном интервале в диапазоне частот Доплера от минус 1/2Тп до 1/2Тп с полосой ΔF и числом каналов N=1/TпΔF, где Тп - период повторения зондирующих импульсов, ΔF - ширина спектра межпериодных флюктуаций сигналов от истинных целей ZΣin=F(vΣij), где i - номер элемента дальности, j - номер периода повторения, n - номер доплеровского фильтра, , F - оператор преобразования Фурье; вычисление амплитуды спектральных составляющих суммарного сигнала  обнаружение сигналов, для которых РΣin превышает порог обнаружения в априорном диапазоне дальностей,
обнаружение сигналов, для которых РΣin превышает порог обнаружения в априорном диапазоне дальностей,  , МA≤М; поиск сигнала цели с шириной спектра ΔFд меньше порогового Δпорог, включающего вычисление ширины спектров ΔFд суммарного сигнала в порядке убывания их амплитуд по дальности, сравнение текущего вычисленного значения ширины спектра ΔFд с заданным пороговым значением Δпорог, при превышении которого принимают решение об обнаружении ложной цели, циклическое повторение вычисления ширины спектра сигнала, следующего по амплитуде, до нахождения сигнала цели с шириной спектра меньше порогового; определение номера доплеровского фильтра nц с максимальной амплитудой спектра цели; определение сигнала рассогласования по частоте, замыкание контура слежения по частоте, подстройка сигналом рассогласования частоты положения nц следящего строба по частоте; узкополосную фильтрацию с полосой ΔF=1/NTn комплексной огибающей импульсных последовательностей сигналов в суммарном и разностном каналах на отслеживаемой nц доплеровской частоте с получением комплексных спектральных составляющих суммарных ZΣ(i,nц) и разностных ZΔ(i,nц) сигналов, выделение амплитудной огибающей сигналов в суммарном канале
, МA≤М; поиск сигнала цели с шириной спектра ΔFд меньше порогового Δпорог, включающего вычисление ширины спектров ΔFд суммарного сигнала в порядке убывания их амплитуд по дальности, сравнение текущего вычисленного значения ширины спектра ΔFд с заданным пороговым значением Δпорог, при превышении которого принимают решение об обнаружении ложной цели, циклическое повторение вычисления ширины спектра сигнала, следующего по амплитуде, до нахождения сигнала цели с шириной спектра меньше порогового; определение номера доплеровского фильтра nц с максимальной амплитудой спектра цели; определение сигнала рассогласования по частоте, замыкание контура слежения по частоте, подстройка сигналом рассогласования частоты положения nц следящего строба по частоте; узкополосную фильтрацию с полосой ΔF=1/NTn комплексной огибающей импульсных последовательностей сигналов в суммарном и разностном каналах на отслеживаемой nц доплеровской частоте с получением комплексных спектральных составляющих суммарных ZΣ(i,nц) и разностных ZΔ(i,nц) сигналов, выделение амплитудной огибающей сигналов в суммарном канале  , выделение сигнала ошибки по дальности в суммарном канале, замыкание контура сопровождения по дальности и подстройка этим сигналом положения (iц) следящего строба дальности, вычисление сигнала углового рассогласования γ(iц,nц) РСН относительно направления на цель по результатам вычисления спектральных составляющих суммарного ZΣ(iц,nц) и разностного ZΔ(iц,nц) сигналов на отслеживаемой точке сцены дальность - доплеровская частота (iц,nц), замыкание контура сопровождения по углу по сигналу углового рассогласования γ(iц,nц) с корректировкой положения РСН моноимпульсной антенны, отличающийся тем, что после квадратурно-фазового детектирования подавляют полосу зеркальных видеочастот, где априорно отсутствует сдвинутый на доплеровскую частоту сигнал цели, полученные действительные суммарно-разностные сигналы оцифровываются с частотой выборки FB, превышающей полосу частот, занимаемых модулирующим сигналом ΔFc более чем в два раза; перед началом поиска сигнала цели после порогового обнаружения определяется число обнаруженных сигналов w; если при циклическом поиске сигнала цели за w циклов не обнаружен сигнал цели, производится: многоканальная доплеровская фильтрация суммарных сигналов в диапазоне частот от нуля до 1/2Тп на дальностях
, выделение сигнала ошибки по дальности в суммарном канале, замыкание контура сопровождения по дальности и подстройка этим сигналом положения (iц) следящего строба дальности, вычисление сигнала углового рассогласования γ(iц,nц) РСН относительно направления на цель по результатам вычисления спектральных составляющих суммарного ZΣ(iц,nц) и разностного ZΔ(iц,nц) сигналов на отслеживаемой точке сцены дальность - доплеровская частота (iц,nц), замыкание контура сопровождения по углу по сигналу углового рассогласования γ(iц,nц) с корректировкой положения РСН моноимпульсной антенны, отличающийся тем, что после квадратурно-фазового детектирования подавляют полосу зеркальных видеочастот, где априорно отсутствует сдвинутый на доплеровскую частоту сигнал цели, полученные действительные суммарно-разностные сигналы оцифровываются с частотой выборки FB, превышающей полосу частот, занимаемых модулирующим сигналом ΔFc более чем в два раза; перед началом поиска сигнала цели после порогового обнаружения определяется число обнаруженных сигналов w; если при циклическом поиске сигнала цели за w циклов не обнаружен сигнал цели, производится: многоканальная доплеровская фильтрация суммарных сигналов в диапазоне частот от нуля до 1/2Тп на дальностях  , где нет отраженных сигналов с получением комплексных спектров суммарных сигналов ZΣin и амплитуд спектральных составляющих суммарного сигнала
, где нет отраженных сигналов с получением комплексных спектров суммарных сигналов ZΣin и амплитуд спектральных составляющих суммарного сигнала  , пороговое обнаружение сигналов источника шумовых помех по амплитудам РΣin спектральных составляющих, превысивших порог обнаружения источника шумового сигнала, нахождение Nэ экстремальных точек (iэ,nэ) с максимальной амплитудой спектральной составляющей PΣin, с вычислением для них спектральных составляющих разностного сигнала ZΔ(i,n), вычисление сигнала рассогласования РСН относительно направления на источник шумовых помех γип как среднюю величину угловых рассогласований γэ для Nэ экстремальных точек (iэ,nэ) по квадратурным спектральным составляющим суммарных ZΣ(iэ,nэ) и разностных ZΔ(iэ,nэ) сигналов; замыкание следящей системы по углу с наведением оси антенны по сигналу углового рассогласования РСН антенны на источник шумовых помех.
, пороговое обнаружение сигналов источника шумовых помех по амплитудам РΣin спектральных составляющих, превысивших порог обнаружения источника шумового сигнала, нахождение Nэ экстремальных точек (iэ,nэ) с максимальной амплитудой спектральной составляющей PΣin, с вычислением для них спектральных составляющих разностного сигнала ZΔ(i,n), вычисление сигнала рассогласования РСН относительно направления на источник шумовых помех γип как среднюю величину угловых рассогласований γэ для Nэ экстремальных точек (iэ,nэ) по квадратурным спектральным составляющим суммарных ZΣ(iэ,nэ) и разностных ZΔ(iэ,nэ) сигналов; замыкание следящей системы по углу с наведением оси антенны по сигналу углового рассогласования РСН антенны на источник шумовых помех.
 , m - номер частоты спектральной составляющей, восстановление спектров аналитических суммарных SΣmj и разностных SΔmj сигналов по спектрам Xmj, перемножение спектров аналитических суммарных и разностных сигналов с комплексно сопряженным спектром зондирующего сигнала S*m с получением спектров сжатых сигналов V∑mj=S∑mjS*m и VΔmj=SΔmjS*m, обратное М-точечное преобразование Фурье с получением для каждого j-го периода повторения М-точечных аналитических временных реализаций сжатых суммарных vΣij, и разностных vΔij сигналов.
, m - номер частоты спектральной составляющей, восстановление спектров аналитических суммарных SΣmj и разностных SΔmj сигналов по спектрам Xmj, перемножение спектров аналитических суммарных и разностных сигналов с комплексно сопряженным спектром зондирующего сигнала S*m с получением спектров сжатых сигналов V∑mj=S∑mjS*m и VΔmj=SΔmjS*m, обратное М-точечное преобразование Фурье с получением для каждого j-го периода повторения М-точечных аналитических временных реализаций сжатых суммарных vΣij, и разностных vΔij сигналов.| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2255353C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| US 6118402 A, 12.09.2000 | |||
| US 6087974 A, 11.07.2000 | |||
| Устройство для измерения геометрии зеркального отражателя | 1987 |
|
SU1500952A1 |

