Изобретение относится к области возобновляющихся источников энергии, а именно волновой и ветровой энергии, и преобразования их в другие виды, преимущественно в электрическую.
Известна ветроэнергетическая установка [1] с использованием основного рабочего элемента в виде лопасти, установленного на платформах, которые в свою очередь соединены в состав, начало и конец которого соединены вместе, то есть образуют кольцо. Состав устанавливается на соответствующих размеров рельсовый путь. Парус имеет наибольший коэффициент использования ветровой энергии. Мощность, развиваемая установкой, отбирается от вала колес платформы.
Недостаток указанной ветроэнергетической установки заключается в том, что ориентация паруса меняется синхронно на всём протяжении времени прохода платформы по кольцевому пути. За это время парус делает полуоборот (180°) вокруг своей оси (мачты).
Известен также ветродвигатель [2], который по своим конструктивным признакам может быть указан в качестве аналога предлагаемого преобразователя энергии.
Данный аналог содержит вертикальный вал, вертикальные лопасти, флюгер и механизм регулирования. На валу закреплён диск, лопасти выполнены в виде плоских пластин и установлены на диске с возможностью поворота относительно их вертикальных осей, на корневых частях которых закреплены верхние магниты, взаимодействующие с нижними магнитами. Последние размещены на поворотной платформе, связанной с флюгером.
Механизм регулирования снабжён центробежным регулятором скорости вращения с ползуном, клином и пластиной, взаимодействующими друг с другом. При этом пластина установлена на платформе с возможностью линейного перемещения в направлении, перпендикулярном плоскости флюгера. Ползунок центробежного регулятора связан через клин с пластиной, взаимодействующей с нижними магнитами.
При взаимодействии верхних магнитов, жёстко закреплённых на осях лопастей, с нижними магнитами, закреплёнными на подвижной платформе, происходит изменение ориентации лопастей относительно направления ветра.
Каждая из лопастей на активном участке принимает положение, перпендикулярное направлению ветра, а на пассивном - вдоль направления.
В качестве недостатка указанного аналога можно указать его конструктивную сложность. Это связано с необходимостью установки магнитов и одновременного изменения их ориентации по всему кругу, где проходит корневая часть вертикальной оси лопастей (парусов).
Указанная особенность приводит к тому, что данную конструкцию трудно реализовать в агрегатах значительной мощности.
Известна также ветроэлектрическая установка [3], которая может быть указана в качестве ближайшего аналога изобретения (прототипа). Она содержит установленные на круговом пути (замкнутая колея) взаимосвязанные платформы, каждая из которых, в свою очередь, включает кинематически связанную вагонетку (тележку) и лопасть (парус).
В качестве недостатка прототипа можно указать конструктивную сложность установки, а также то, что его невозможно использовать для преобразования энергии волн.
Технический результат заключается в значительном повышении мощности ветроэнергетической установки за счёт одновременного преобразования энергии поступательного и поперечного движения волн и обеспечивается за счет того, что преобразователь энергии ветра и волн, содержащий взаимосвязанные через рычаги вращающиеся платформы, на каждой из которых установлена лопасть (парус) имеет дополнительно взаимосвязанный преобразователь движения и узел изменения ориентации и фиксации положения лопасти, установленные в центре и взаимодействующие со всеми лопастями и флюгером, установленным также в центре преобразователя.
Узел изменения ориентации и фиксации положения лопасти содержит фланец, установленный на втулке лопасти с возможностью поворота на 30° и связанный неподвижно с внешней шлицевой полумуфтой и фиксатором положения цепей, взаимодействующих соответственно с внутренней шлицевой полумуфтой и взаимно сдвинутыми относительно друг друга на 60° и соединенными неподвижно сегментными звездочками, при этом внутренняя шлицевая полумуфта, установленная с возможностью вертикального смещения, с помощью пружины связана с установочным кольцом и взаимодействует через кольцо с профильным торцом с отжимными подшипниками.
Преобразователь содержит связанные горизонтальную лопасть, установленную на горизонтальном кронштейне, закрепленном над поплавковой камерой и звездочку, а пары сегментных звездочек через цепь и трос связаны со звездочками, установленными в соответствующих взаимно противоположных горизонтальных лопастях.
Преобразователь движения содержит вращающийся на неподвижной стойке корпус и выходной вал, на котором в два яруса установлены кинематически связанные верхние и нижние обгонные муфты и центральные конические шестерни, каждая из которых входит в сцепление с шестернями-сателлитами, размещенными по периметру боковой поверхности корпуса через равные промежутки одна над другой по вертикали, при этом шестерни-сателлиты через соответствующие обгонные муфты связаны с храповыми колесами, рычаги вращения которых через втулки соединены неподвижно с наконечниками соответствующих спаренных рычагов, кроме того, выходной вал через конические шестерни связан с электрогенератором (насосом), установленным на торце неподвижной стойки.
На осях вращения нижних колес-сателлитов установлены вторые храповые колеса, взаимодействующие также с рычагами первых храповых колес, и через верхние и нижние цилиндрические шестерни с соответствующими верхними обгонными муфтами и шестернями-сателлитами.
Вращающиеся платформы выполнены в виде каркаса пирамидальной формы, на каждом из которых установлены штанга и связанная с ней неподвижно верхняя звездочка с возможностью свободного вращения на вертикальной стойке, кроме того, они содержат жестко установленные на одной втулке нижние и верхние звездочки, при этом верхние звездочки через цепь связаны со звездочками, установленными на втулках двух половин лопастей, средние звездочки через цепь связаны со звездочкой, установленной дополнительно на втулке флюгера, а нижние звездочки через цепи и трос - с соответствующими сегментными звездочками.
Каждая вращающаяся платформа содержит дополнительно кинематически связанные двухшлицевую муфту, фланец и кольцо с профильным (двухкулачковым) торцом, взаимодействующим с двумя подшипниками, установленными на каркасе платформы, верхняя торцевая плоскость которого через вновь введенную пружину взаимодействует с фланцем, установленным на одной втулке с верхней звездочкой с возможностью вертикального смещения и сцепления через двухшлицевую муфту со средней звездочкой, связанной с флюгером и двумя половинами лопасти.
Вращающие платформы выполнены в виде герметичных камер обтекаемой формы, на которых установлены плоские лопасти и связанные с ними неподвижно звездочки, с возможностью свободного вращения вокруг вертикальных стоек, при этом звездочки через цепи и тросы кинематически связаны с соответствующими сегментными звездочками.
На фиг.1 изображён общий вид преобразователя энергии ветра и волн, где:
1 - стойка преобразователя;
2 - вращающаяся платформа (поплавковая камера);
3 - лопасть;
4 - преобразователь движения;
5 - рычаги спаренные;
6 - узел для изменения ориентации и фиксации положения лопастей 3;
авб и бса - активный и пассивный участки вращения поплавковых камер 2 соответственно.
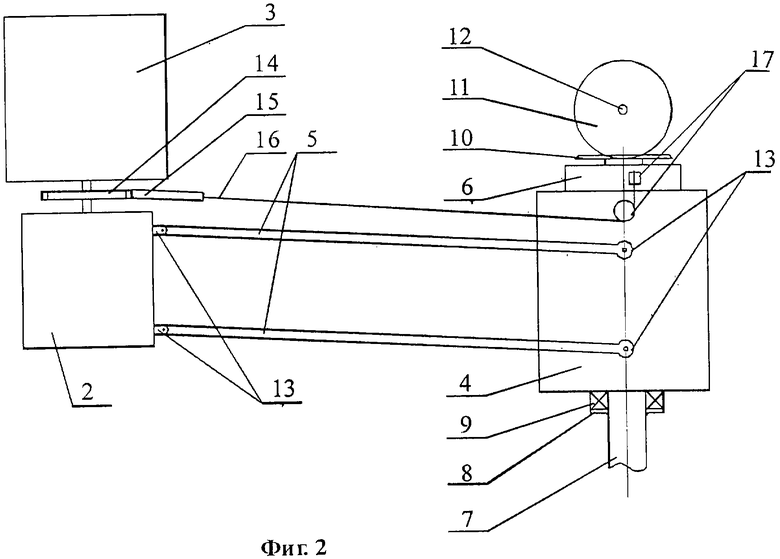
На фиг.2 приведена кинематическая связь между поплавковой камерой 2 (ветровой вариант вращения) с преобразователем движения 4,
7 - неподвижная стойка;
8 - упорное кольцо;
9 - упорный подшипник;
10 - ведущая шестерня;
11 - ведомая шестерня;
12 - вал редуктора электрогенератора (насоса);
13 - плоские шарниры;
14 - звёздочка;
15 - цепь;
16 - трос;
17 - блочки.
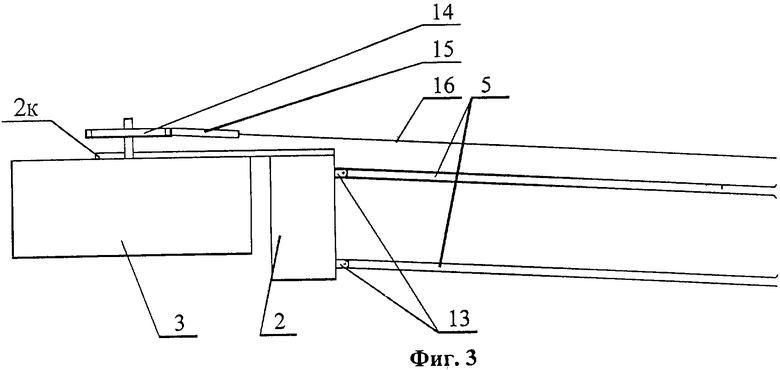
На фиг.3 изображен волновой вариант вращения поплавковой платформы 2 (камеры), где 2К - кронштейн горизонтальный.
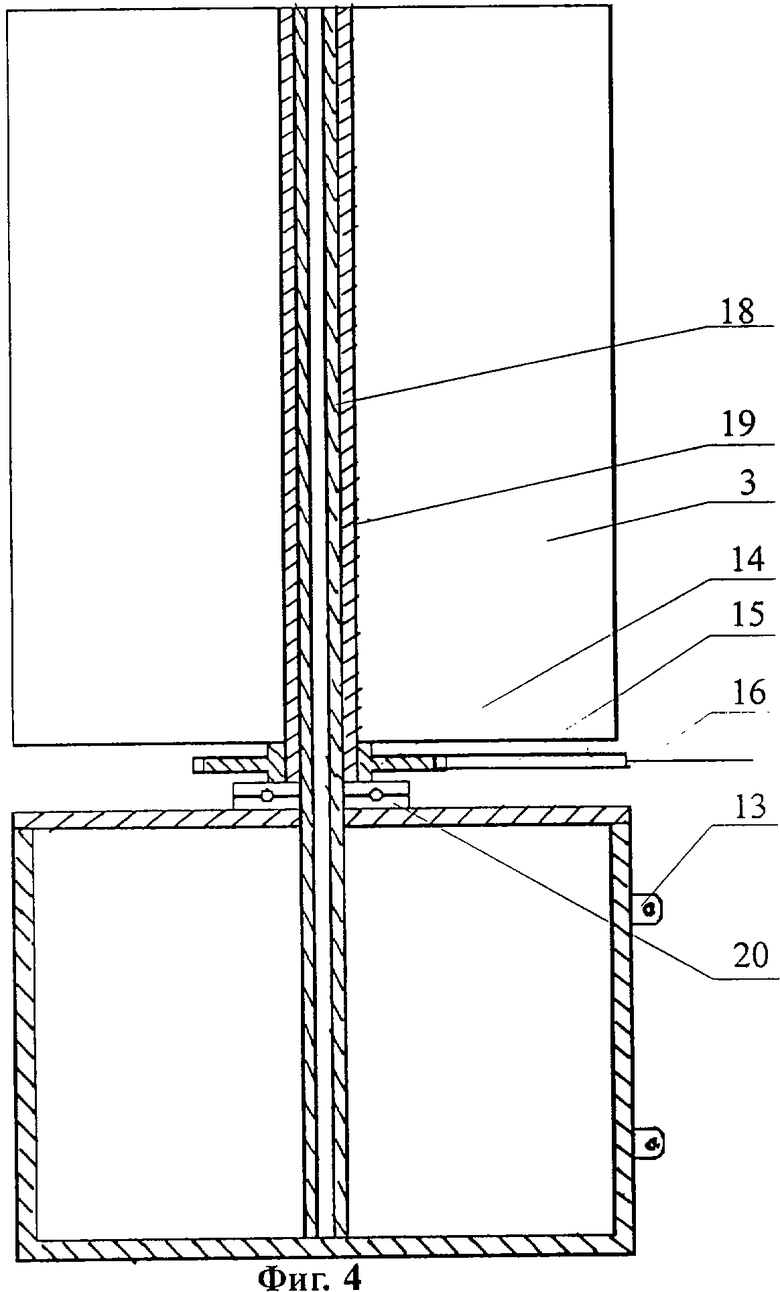
На фиг.4 изображена конструкция ветрового варианта поплавковой платформы 2, где:
18 - вертикальная стойка лопасти 3;
19 - втулка лопасти 3;
20 - упорный подшипник.
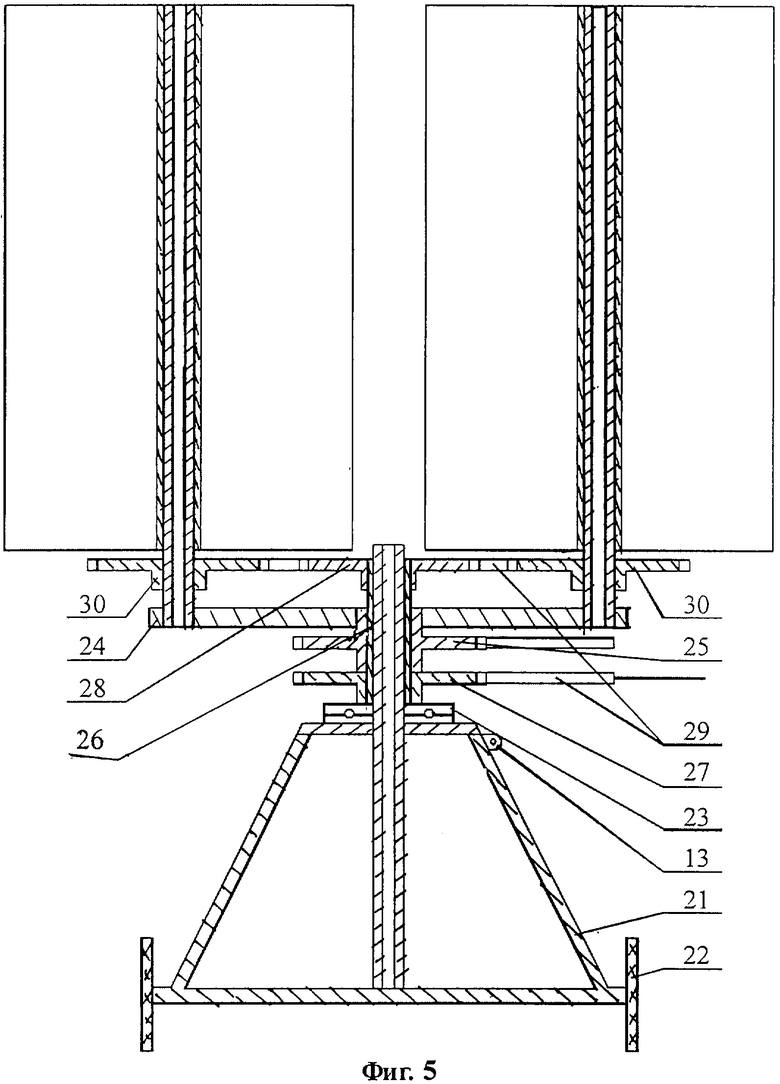
На фиг.5 изображена конструкция автономного ветрового варианта
вращающейся платформы 2, где:
21 - каркас пирамидальный;
22 - колесо;
23 - упорный подшипник:
24 - коромысло;
25 - средняя звездочка;
26 - втулка;
27 - нижняя звездочка;
28 - верхняя звездочка;
29 - цепь;
30 - звездочки двух половин лопасти 3.
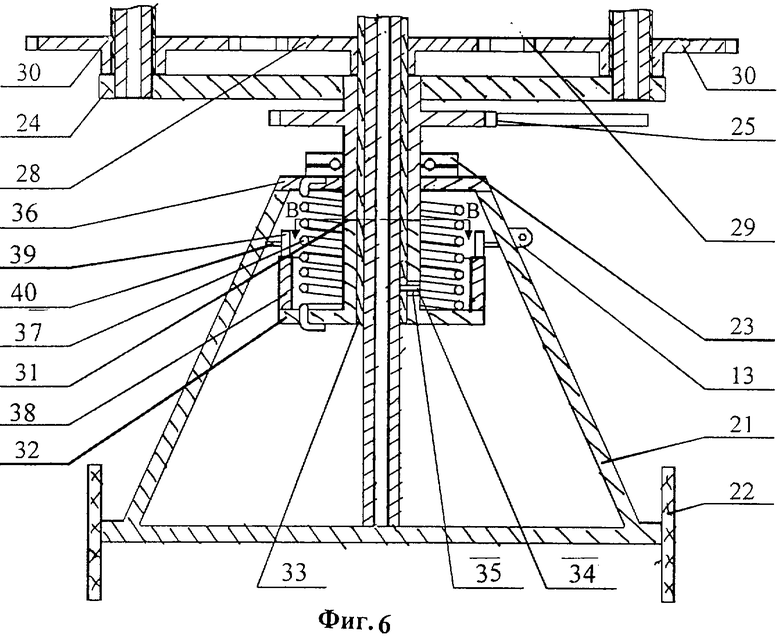
На фиг. 6 представлен второй вариант конструкции вращающихся платформ 2, где каждая лопасть 3 имеет автономный вариант узла 6 изменения ориентации и фиксации положения двух половинок лопастей 3, где:
31 - двухшлицевая муфта сцепления;
32 - фланец;
33 - втулка соединительная;
34 - палец направляющий;
35 - паз вертикальный;
36 - верхняя торцевая плоскость каркаса;
37 - пружина;
38 - кольцо с профильным (двухкулачковым) торцом;
39 - подшипники отжимные;
40 - крепление подшипников.
На фиг.7 изображен вид В-В по фиг.6.
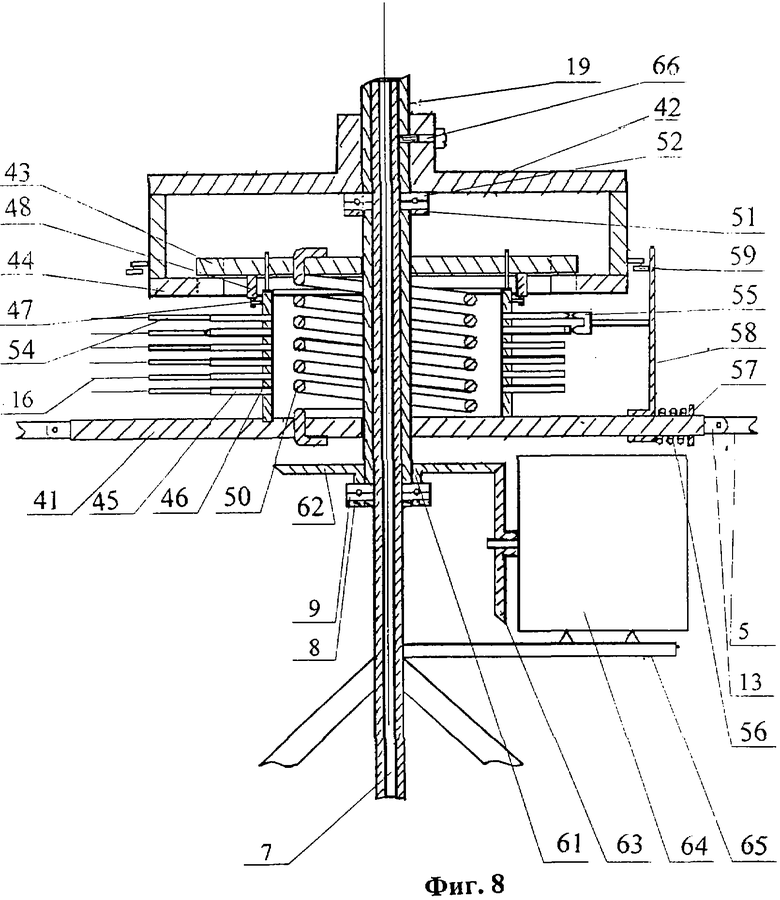
На фиг. 8 изображена конструкция узла 6 для изменения ориентации и фиксации положения лопастей 3, где:
41 - кольцо установочное;
42 - фланец;
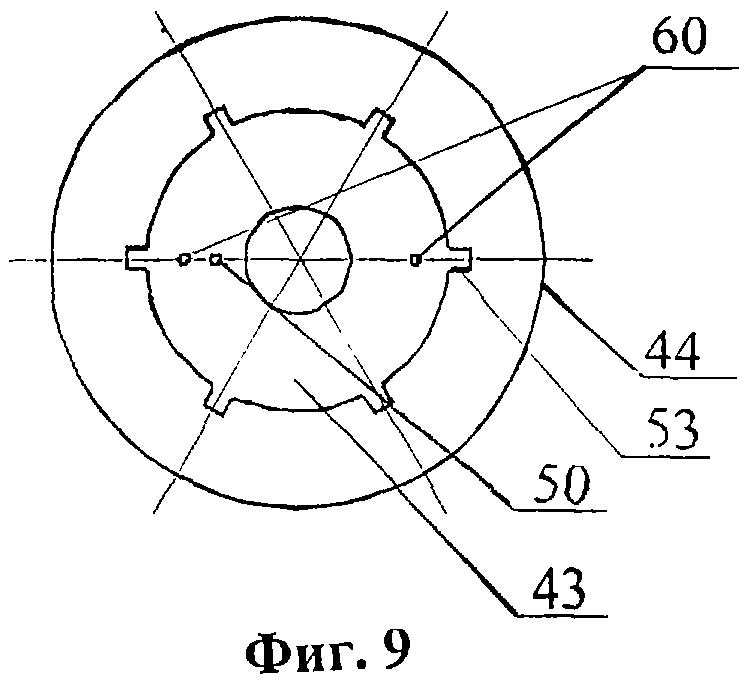
43, 44 - внутренняя и внешняя шлицевые полумуфты;
45 - сегментные звёздочки;
46 - кольца промежуточные;
47 - подшипник;
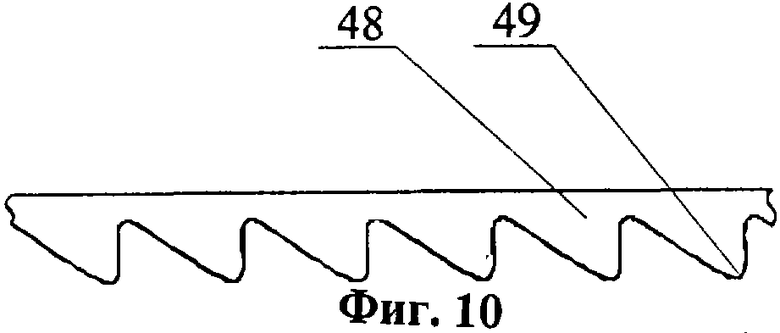
48 - кольцо с профильным (кулачковым) торцом;
49 - профиль торца кольца 48;
50 - пружина;
51 - второе упорное кольцо;
52 - второй упорный подшипник;
53 - шлицы полумуфт 43, 44;
54 - цепь;
55 - скоба с двумя зубцами;
56 - пружина;
57 - упорное кольцо (прокладка)
58 - упорная планка;
59 - боковая направляющая;
60 - направляющие стержни;
61 - выходной вал;
62 - ведущая шестерня;
63 - ведомая шестерня;
64 - электрогенератор (насос);
65 - подставка;
66 - фиксатор (болт).
На фиг.9 изображен вид на внутреннюю 43 и внешнюю 44 шлицевые полумуфты.
На фиг. 10 изображен вид развертки профильного торца 49 кольца 48.
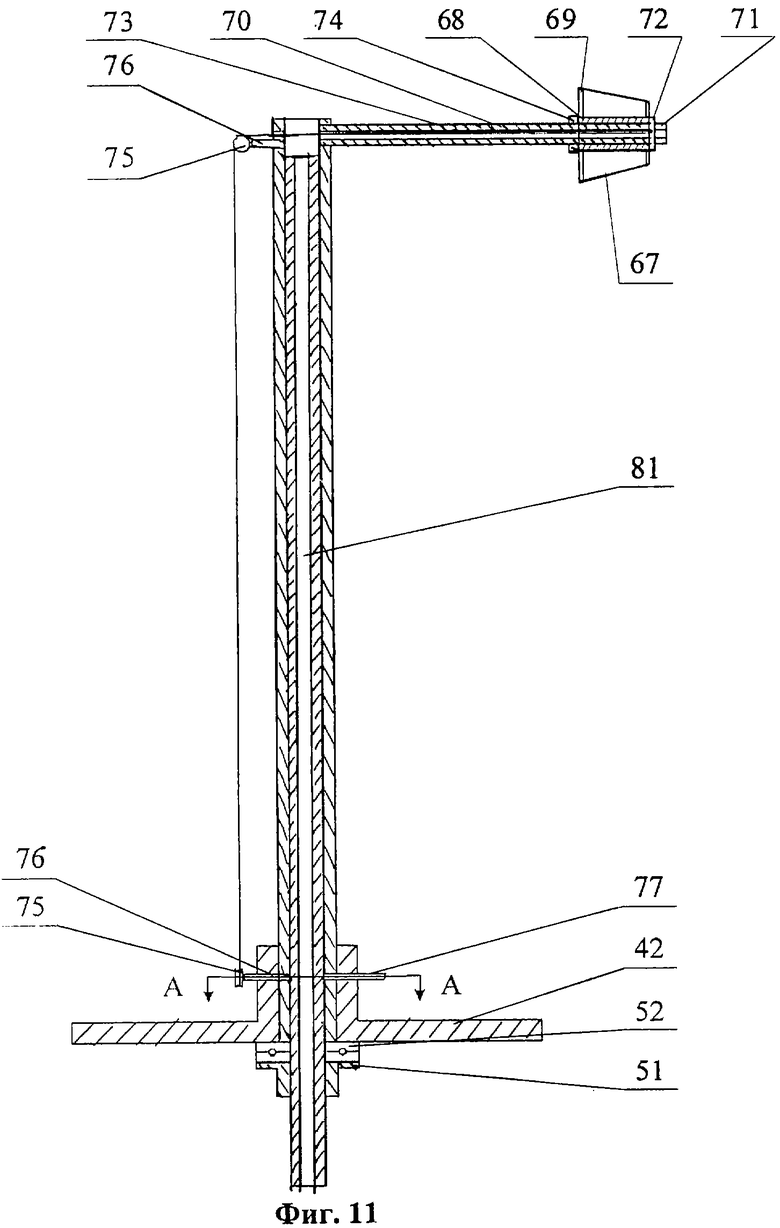
На фиг.11 изображен флюгер конической формы, где:
67 - флюгер конический;
68 - втулка цилиндрическая;
69 - радиальные стойки;
70 - рычаг трубчатый горизонтальный;
71 - паз;
72 - палец;
73 - трос;
74 - упор;
75 - блочки;
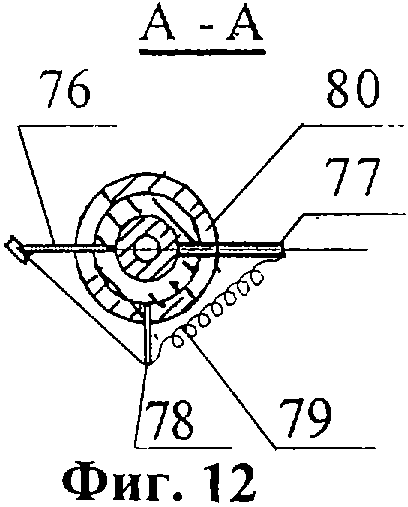
76,77,78 - рычаги первый, второй и третий соответственно;
79 - пружина;
80 - паз;
81- втулка флюгера 67.
На фиг.12 изображен вид А-А по фиг.11.
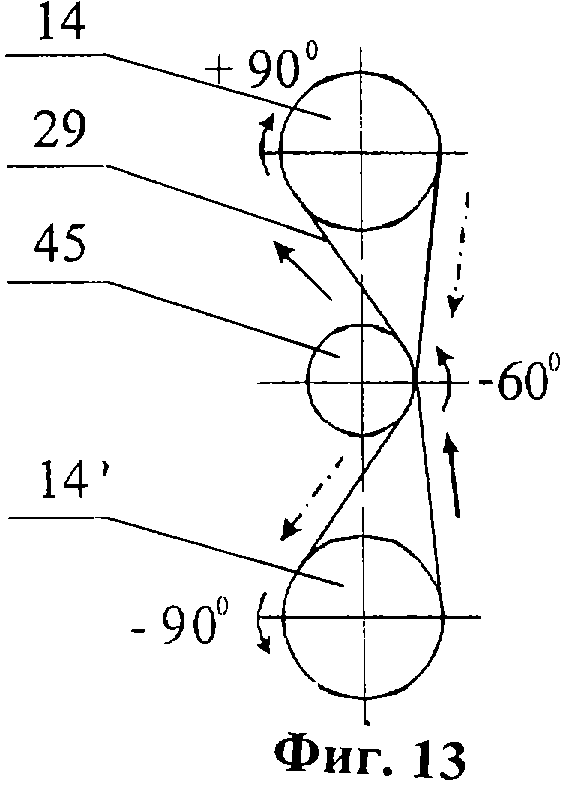
На фиг.13 приведена кинематическая схема цепной связи между сегментными звездочками 45 и звездочками 14, установленными на втулках одинарных лопастей 3.
На фиг. 14 изображен третий вариант для изменения ориентации и фиксации положения вертикальных и горизонтальных лопастей, где на втулке 81 флюгера 67 установлена дополнительная звездочка 82.
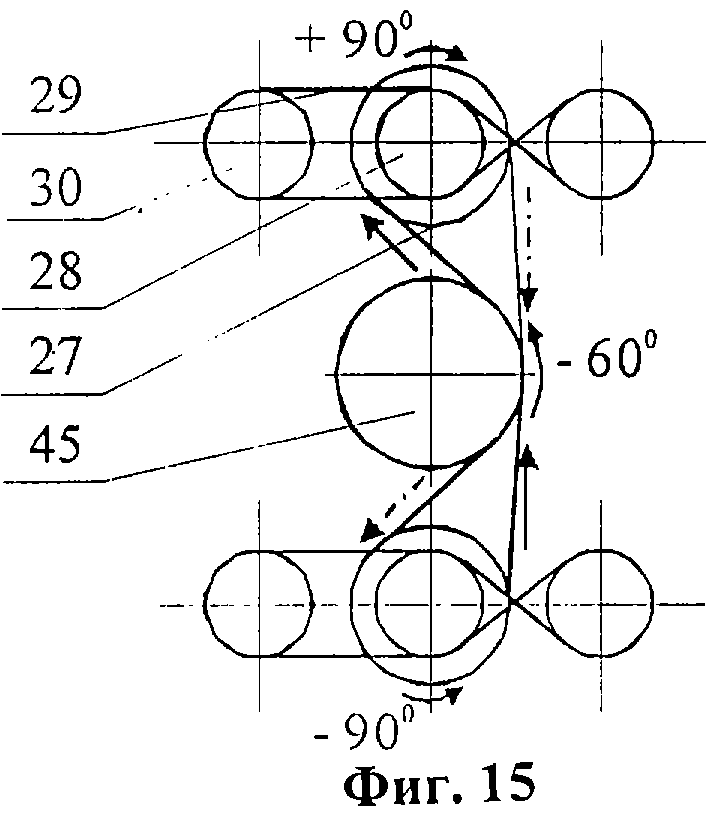
На фиг. 15 приведена кинематическая схема цепных связей между сегментными звездочками 45 и нижними звездочками 27, установленными на втулках 26 лопастей 3, состоящих из двух половинок и обеспечивающих их поворот во взаимно противоположных направлениях на угол ±90°.
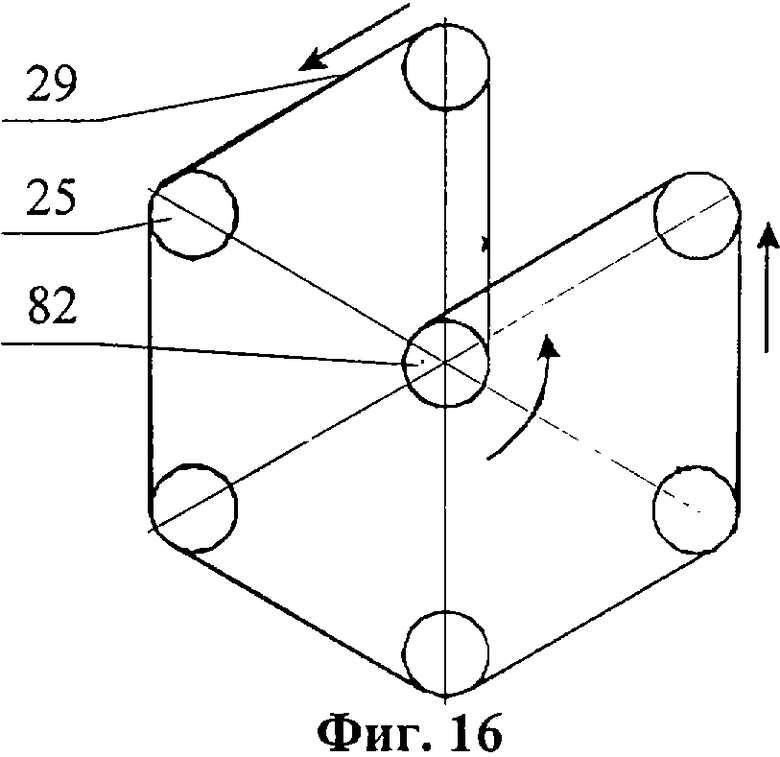
На фиг. 16 приведена кинематическая связь цепной передачи между звездочкой 82, установленной на стойке флюгера 67 и средними звездочками 25, установленными на коромыслах 24 лопастей 3, состоящих из двух половинок.
На фиг. 17 изображен преобразователь движения 4, совмещенный с узлом 6 изменения ориентации лопастей 3, где:
83 - выходной вал преобразователя 4;
84 - корпус преобразователя движения 4;.
85 - крышка преобразователя движения 4;
86 - диск неподвижный;
87 - верхняя и нижняя обгонные муфты;
88, 89 - верхняя и нижняя центральные конические шестерни;
90 - шестерни-сателлиты;
91 - храповое колесо;
92 - обгонная муфта;
93 - собачка (см. фиг.19);
94 - рычаг храпового колеса 91;
95 - втулка;
96 - ось шестерни-сателлита;
97 - наконечник спаренного рычага 5 (см. фиг.19);
98 - шестерня ведущая;
99 - генератор (насос);
100 - пружина.
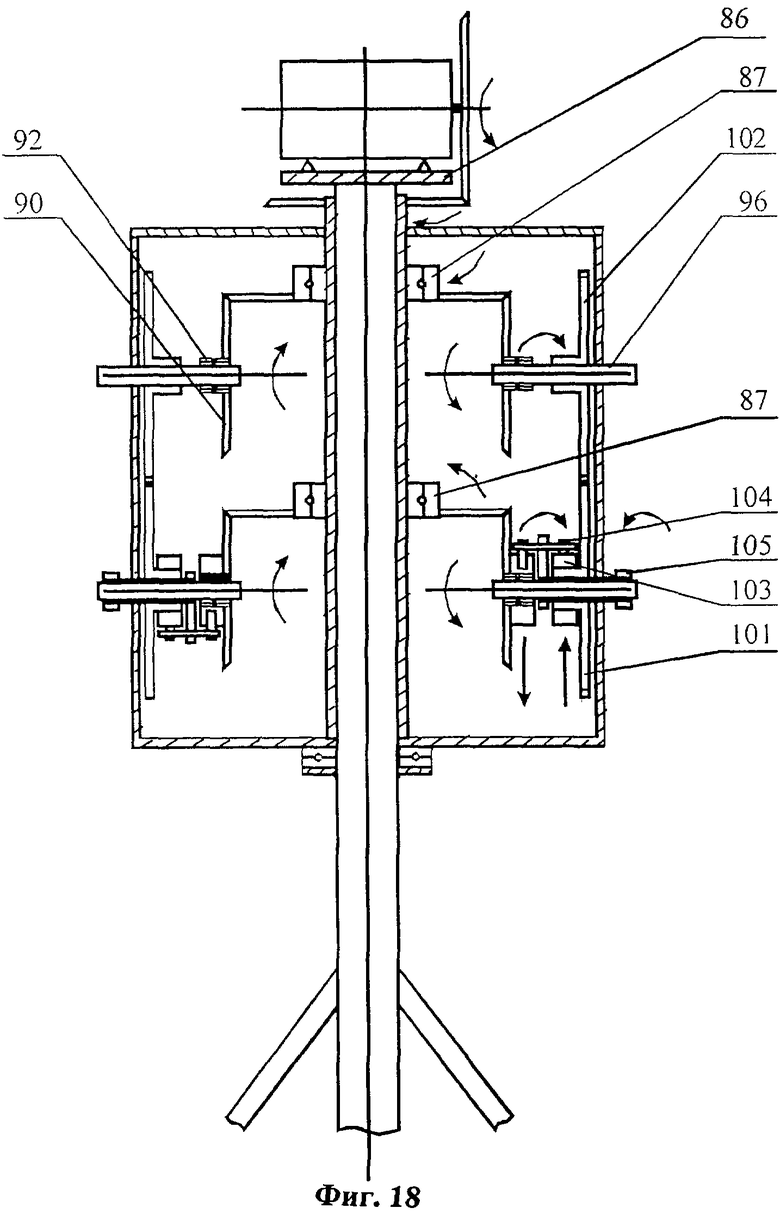
На фиг.18 изображен второй вариант преобразователя движения, где:
101, 102 - первая и вторая цилиндрические шестерни;
103 - второе спаренное храповое колесо;
104 - вторая собачка;
105 - наконечник одиночного рычага.
На фиг.19 изображен преобразователь энергии ветра и волн с первым вариантом преобразователя движения по фиг.8; где:
106, 107 - ведущая и ведомая конические шестерни;
108 - электрогенератор (насос);
109 - диск неподвижный;
110 - фиксатор углового положения.
Преобразователь 4 устанавливается в море на неподвижной вертикальной стойке 7 так, чтобы поплавковые камеры 2 и преобразователь движения 4 оказались на уровне моря. Стойка 7 устанавливается на железобетонной основе с боковыми подпорками. Преобразователь 4 может быть также подвешен над уровнем моря с помощью горизонтальной балки.
Поплавковая платформа 2 представляет собой герметичные камеры обтекаемой формы типа торпеды. На фиг.3 поплавковые камеры 2 имеют форму цилиндра. Желательно выполнить их из пластика.
Лопасти 3 устанавливаются над герметичными поплавковыми камерами 2 на вертикальных стойках 18, и они меняют свою ориентацию на угол ±90° относительно направления ветра или волн.
Для сохранения вертикального положения лопастей 3 используются спаренные рычаги 5. Они состоят из двух параллельных одинаковых стержней, концы которых с помощью плоских шарниров 13 прикреплены к боковым поверхностям преобразователя движения 4 и поплавковых платформ 2. При подъеме и опускании платформы 2 на волнах стойка 18 лопасти 3 сохраняет своё вертикальное положение.
На фиг.1 при указанном направлении ветра или волн участок авб вращения платформы 2 является активным, а участок бса - пассивным. На активном участке лопасти 3 ориентированы перпендикулярно, а на пассивном - вдоль направления ветра или волн.
При такой ориентации лопастей 3 поплавковые платформы 2 вращаются вокруг вертикальной стойки преобразователя 7 по часовой стрелке.
Вертикальная неподвижная стойка 7 устанавливается на дне моря около берега так, чтобы преобразователь движения 4 оказался над уровнем моря. Параллельные спаренные рычаги 5 с помощью плоских шарниров 13 установлены один над другим и ориентированы в вертикальной плоскости. Они обеспечивают вертикальность стойки лопасти 18 при ее вращении вокруг стойки 7. Преобразователь движения 4 свободно вращается на неподвижной стойке 7. Для этого на стойке 7 сварено неподвижное упорное кольцо 8 и установлен упорный подшипник 9.
Над преобразователем движения 4 на стойке 7 установлен также узел 6 для изменения ориентации и фиксации положения лопастей 3. Электрогенератор 12 устанавливается на горизонтальном диске, закреплённом на верхнем торце стойки 7. На валу генератора 12 установлена ведомая шестерня 11. Вращение от ведомой шестерни на генератор 12 должно быть передано через редуктор.
Редуктор необходим для согласования скорости вращения ведомой шестерни 11 со скоростью вращения ротора электрогенератора 12.
На втулке 19 неподвижно установлены лопасть 3 и звёздочка 14. Они имеют возможность свободно вращаться вокруг вертикальной стойки 18 и лопасти 3. Стойка 18 установлена, в свою очередь, неподвижно по центру поплавковой платформы 2. Поплавковая камера 2 должна быть герметичной и иметь обтекаемую форму, типа торпеды. Подъемная сила поплавковой камеры 2 должна быть такой, чтобы обеспечить надводное положение звёздочки 14, установленной в корневой части лопасти 3.
Звёздочка 14 находится в сцеплении с цепью 15, которая затем переходит в связанные с ней с цепью с обоих концов тросы 16. Тросы 16 соединяют оба конца цепи 15 с концами цепи 54, входящими в сцепление с сегментными звёздочками 45. Таким образом, образуется замкнутое соединение, передающее вращение на угол +60° от сегментных звёздочек 45 на соответствующие звёздочки 14 взаимно противоположных лопастей 3 и поворачивающих их соответственно на углы ±90°.
Лопасть по фиг.3 имеет удлинённую в горизонтальном направлении форму. Лопасть 3 устанавливают рядом с поплавковой камерой 2 на горизонтальном кронштейне 2к, закреплённом над поплавковой камерой 2.
Такая установка лопасти 3 обеспечивает максимальный отбор энергии морской волны в самом подвижном поверхностном слое его перемещения.
При необходимости одновременного использования энергии горизонтального перемещения волн и ветра на одном валу со звёздочкой 14 могут быть установлены две лопасти 3: для ветра - сверху и для волны - снизу.
Лопасть 3 и звездочка 14, установленные неподвижно на втулке 19, свободно вращаются на вертикальной стойке 18. Вертикальность стойки 18 лопасти 3 обеспечивается с помощью параллельных спаренных рычагов 5. Плоские шарниры 13, неподвижно установленные на определённом расстоянии на боковых поверхностях преобразователя движения 4 и поплавковой платформы (камеры) 2, при взаимодействии с параллельными и одинаковыми спаренными рычагами 5 обеспечивают свободное качание платформ 2 на волнах. При этом стойки 18 лопастей 3 сохраняют вертикальное положение по всей траектории их вращения вокруг центральной стойки независимо от высоты волны.
На фиг.5 приведена конструкция ветрового наземного варианта вращающейся платформы 2. В этом варианте преобразователя нет необходимости в преобразователе движения 4. Платформы 2 выполнены в виде каркаса пирамидальной формы 21. Каркас создает минимальное сопротивление встречному потоку воздуха при своем вращении и обеспечивает устойчивое вертикальное положение лопасти 3, состоящей из двух половин. Каркас 21 установлен на двух колесах 22. На верхнем торце каркаса 21 на упорном подшипнике 23 установлено коромысло 24, с которым неподвижно связана средняя звездочка 25. Коромысло 24 с помощью средней звездочки 25 свободно поворачивается вокруг втулки 26. На этой втулке 26 неподвижно установлены нижняя 27 и верхняя 28 звездочки. Верхняя звездочка 28 с помощью цепи 29 взаимодействует с двумя звездочками 30, установленными на втулках двух половин лопасти 3 (см.фиг.5 и 6). При этом нижняя звездочка 27 через цепь 29 и трос взаимодействует с сегментными звездочками 45.
Средняя звездочка 25 через цепь 29 взаимодействует со звездочкой 82, установленной неподвижно на стойке флюгера 67.
При изменении направления ветра меняется ориентация флюгера 67. Это приводит к вращению звездочки 82, установленной на втулке 81 флюгера 67. С помощью цепи 29 это вращение передается на средние звездочки 25, установленные на коромыслах 24 всех лопастей 3 преобразователя. Таким образом, осуществляется ориентация коромысел 24 лопастей 3 относительно направления ветра.
Изменение ориентации левой и правой половин лопастей 3 относительно коромысла 24 осуществляется с помощью звездочек 30, установленных на втулках 26, и верхней звездочки 28. Кинематическая схема их соединения с помощью цепи 29 приведена на фиг. 13.
Верхняя звездочка 28, закрепленная на одной втулке 26 с нижней звездочкой 27, дважды за период в точках а и б меняют свое угловое положение на угол ±90°. Такое изменение углового положения звездочек 27, 28 осуществляется с помощью цепной связи нижней звездочки 27 каждой пары противоположно расположенных лопастей 3 с соответствующей секцией сегментных звездочек 45.
Изменение углового положения сегментных звездочек 45 на угол 60° при их вращении вокруг неподвижной стойки 7 преобразуется во вращение нижней звездочки 27 на угол ±90°. Так как в целом за период цепь 29 не меняет свое положение относительно звездочек, ее можно в целях экономии заменить тросом. Тросы соединяют концы двух звеньев цепи 29, образуя замкнутую цепь согласно кинематической схеме на фиг.13.
Второй вариант конструкции вращающейся платформы 2 на фиг.6. отличается от конструкции на фиг. 5 тем, что имеет автономный узел 4 изменения ориентации и фиксации положения двух половин лопасти 3.
Это достигается тем, что средняя звездочка, удерживающая ориентацию коромысла относительно направления флюгера (ветра), через двухшлицевую муфту сцепления 31 связана с фланцем 32. Фланец 32 установлен на соединительной втулке 33 с возможностью свободного перемещения по вертикали. Для этого в соединительной втулке 33 неподвижно установлен палец направляющий 34, который ходит по пазу вертикальному 35 во фланце 32. Вращение фланца 32 с помощью втулки 33 передается верхней звездочке 28. Для изменения ориентации двух половинок лопасти 3 используется вращение платформы 2 вокруг центрального колеса. На верхней торцевой плоскости каркаса 36 установлены упорный подшипник и коромысло, связанные со средней звездочкой. Эта звездочка, в свою очередь, через двухшлицевую муфту сцепления 31 (см. фиг.7) связана с фланцем 32. Фланец 32 с помощью пружины 37, которая работает на закрутку и на сжатие, связан с верхней торцевой плоскостью вращающегося каркаса 36.
Пружина 37 при вращении каркаса 36 закручивается на 180°. В точках а и б кулачковые выступы профильного торца кольца 38 наталкиваются на отжимные подшипники 39. С помощью креплений 40 подшипники 39 установлены на боковых стойках каркаса 36. При отжатии кольца 38 и фланца 32 вниз шлицы муфты сцепления 31 выходят из сцепления друг с другом. При этом фланец 32, а также связанная с ним верхняя звездочка 28 поворачиваются на 180° относительно неподвижного коромысла 24. При соотношении числа зубьев верхней звездочки Z1 с числом зубьев Z2 звездочек 30, установленных на втулках двух половинок лопастей 3, Z1/Z2=1/2. Последние меняют свою ориентацию на 90°. После изменения указанной ориентации фланец 32 снова входит в сцепление со средней звездочкой 25, что осуществляется с помощью муфты 31. Таким образом, фиксируется положение двух половинок лопастей 3 на всем протяжении активных и пассивных участков вращения платформ 2. На активном участке половинки лопастей 3 ориентированы перпендикулярно направлению ветра, а на пассивном - вдоль указанного направления.
На фиг.8 приведена конструкция узла 6 для изменения ориентации и фиксации положения лопастей 3.
На торце вертикальной стойки 7 неподвижно устанавливается второе упорное кольцо 51 и второй упорный подшипник 52. Над подшипником 52 сверху устанавливают фланец 42 с фиксатором углового положения (болт) 66. В зависимости от направления ветра или волны меняется угловое положение фланца 42, к которому крепится узел 6 для изменения ориентации и фиксации положения лопасти 3. Внешняя шестишлицевая полумуфта 44 крепится к фланцу 42. Одновременно при изменении углового положения фланца 42 меняется и фиксируется угловое положение кольца с профильным (кулачковым) торцом 48. Узел 6 для изменения ориентации лопастей 3 включает в себя конструктивные элементы 43-55. Элементы 56-61 относятся к фиксатору положения лопастей 3. Узел 6 изменения ориентации обеспечивает через каждую 1/6 периода вращения (60°) поворот лопастей 3 на угол ±90° при наличии у преобразователя шести лопастей 3. При четырёх лопастях 3 этот угол составляет 90°, а при восьми лопастях -45°. Соответственно меняется её число шлицов у полумуфт 43 и 44 и кулачков профильного торца 49.
Узел 6 изменения ориентации лопастей 3 является подвижным относительно фланца 42. При этом угловое положение фиксатора положения лопастей 3 не меняется. Узел 6 изменения ориентации положения лопастей 3 состоит из неподвижно соединённых друг с другом внутренней шлицевой полумуфты 43, взаимно сдвинутых на 60° сегментных звездочек 45, колец промежуточных 46 и кольца с отжимными подшипниками 47 (см. фиг.8).
Отжимные подшипники 47 перемещаются по профильному (кулачковому) торцу 49 кольца 48. Согнутые концы второй пружины 50 обеспечивают постоянный прижим подшипника 47 к профильному торцу 49 кольца 48.
Взаимодействие подшипника 47 с кулачковыми выступами профильного торца 49 приводит к подъему внутренней шлицевой полумуфты 43 и выводит ее из сцепления с внешней полумуфтой 44. Заведенная до этого пружина 50 поворачивает на 60° по часовой стрелке сегментные звездочки 45. Только одна звездочка из шести сегментных звездочек 45 входит в сцепление с соответствующей цепью из шести и поворачивает одну из лопастей 3 (в т. a) на угол +90°, другую - (в т. б) на угол -90°.
После этого шлицы полумуфт 43 и 44 снова входят в сцепление друг с другом. Так как верхний конец пружины 50 входит в отверстие внутренней шлицевой полумуфты 43, начинается закрутка пружины 50 на 60°. Накопление энергии закрутки пружины 50 меняет через 1/6 периода вращения платформ 2 ориентацию следующей пары лопастей 3, оказавшихся в это время в точках а и б траектории их движения вокруг вертикальной стойки (см. фиг.1).
В следующие полпериода с лопастями 3 взаимодействуют последовательно нижние сегментные звездочки 45 каждой из трех пар. При этом угол поворота лопастей 3 в каждой паре меняется на противоположный. Таким образом, каждая из лопастей 3 меняет свое положение на угол ±90° в точках а и б. В точке а лопасть 3 установится перпендикулярно направлению ветра (или волны), а в точке б - становится вдоль указанного направления.
Угловое положение шестишлицевых полумуфт 44 жестко связано с угловым положением профильного торца 49 кольца 48.
При изменении направления ветра или волн необходимо менять угловое положение фланца 42 и кольца 48 с профильным (кулачковым) торцом 49 и фиксировать угловое положение болтом 66.
Кольцо установочное 41 имеет отверстие для утопления нижнего конца пружины 50. Концентричная выточка в установленном кольце препятствует радиальным перемещениям вращающих элементов узла 6 для изменения ориентации лопастей 3.
Фиксатор положения лопастей 3 содержит три одинаковые выдвигающиеся подпружиненные секции. Каждая секция при этом включает в себя скобу с двумя зубцами 55, пружину 56, прокладки 57, упорную планку 58 и две боковые направляющие 59.
Каждая секция охватывает пару цепей 54 и фиксирует их положение в период между циклами их сцепления с сегментными звездочками 45.
Зубья во всех скобах 55 находятся на одной вертикали и по очереди взаимодействуют с соответствующими сегментными звездочками 45. Расклинивание зубца 55 узла 6 фиксации положения лопастей 3 происходит, когда соответствующая сегментная звездочка 45 (одна из двух) подходит к верхнему или нижнему зубцу 55 и выталкивает зубец из цепи 54. При этом обе цепи 54 освобождаются, и происходит смещение связанных между собой цепей 54 в ту и другую стороны, в зависимости от того, какая из сегментных звездочек 45 (верхняя или нижняя) взаимодействует с цепью.
Зубцы 55 в скобах в каждой секции соединены друг с другом на определенном расстоянии между ними. Это расстояние зависит от расстояния между двумя цепями 54 и определяется толщиной прокладки 57. Пружина 56 устанавливается между упорной планкой 58 и прокладкой 57. Она обеспечивает необходимое усилие для заклинивания зубца 55 в цепь 54 и для его расклинивания при подходе соответствующей сегментной звездочки 45.
Все три секции фиксатора положения 6 соединены неподвижно с фланцем 42, угловое положение которого задается и фиксируется болтом 66. При этом угловое положение фланца 32 относительно установочного кольца 41 может меняться автоматически в зависимости от направления и скорости ветра.
Для предотвращения угловых смещений узла 6 фиксации положения лопастей 3 относительно внутренней шлицевой полумуфты 43 его устанавливают на двух параллельных направляющих стержнях 60. Стержни 60, в свою очередь, неподвижно устанавливают на кольце 46 с отжимными подшипниками 47.
Преобразователь энергии ветра и волн может работать без преобразователя движения 4, что существенно упрощает конструкцию преобразователя. При этом используется энергия только текущей среды - ветра или воды.
Преобразователь движения используется, когда необходимо преобразовать энергию подъема и опускания поплавковой платформы 2 (камеры) на волнах.
Следует отметить, что преобразователи движения на фиг. 17 и на фиг.18 могут быть использованы автономно без устройства 6 для изменения ориентации и фиксации положения лопастей 3 и без лопастей 3, с одним или несколькими поплавковыми камерами 2 (без лопастей 3) в качестве самостоятельного волнового двигателя.
На фиг. 8 приводится конструкция преобразователя энергии ветра и волн без преобразователя движения 4.
В этом случае на вертикальной стойке 7 с помощью упорного кольца 8 и упорного подшипника 9 устанавливается вращающееся установочное кольцо 41, которое соединяется с помощью плоских шарниров 13 и рычагов с вращающимися на колесах (или плавающими) платформами 2, на которых установлены лопасти 3 и связанные с ними звездочки 14. Кольцо 41 соединено неподвижно с соосным выходным валом 61 и ведущей шестерней 62 преобразователя.
Ведущая шестерня 62 передает вращение на ведомую шестерню 63, установленную на валу редуктора электрогенератора (насоса). Электрогенератор 12 установлен на подставке 65, закрепленной неподвижно на стойке 7.
При использовании преобразователя движения (ПД) роль установочного кольца 41 играет корпус 84 преобразователя движения 4.
Для автоматической регулировки скорости вращения выходного вала 61 преобразователя необходимо с опережением или с задержкой относительно направления ветра (а-б) менять ориентацию лопастей 3. При этом угол смещения может меняться в пределах от 0 до 45° в зависимости от скорости ветра или волн. При ураганных скоростях (более 40 м/с) при угле смещения 45° происходит самоторможение преобразователя, т.к. положительный и отрицательный моменты вращения, создаваемые лопастями 3 на активном и пассивном участках траектории их вращения, компенсируют друг друга.
Для решения данной задачи используются флюгер формы усеченного конуса (см.фиг.11), взаимодействующий с фланцем 42. В зависимости от скорости ветра угловое положение фланца 42 должно регулироваться в пределах от 0 до 30°.
Это угловое смещение в 30° с помощью цепной передачи преобразуется в угол 45°, на который смещается фаза переключения ориентации лопастей 3. Для этого отношение числа зубьев сегментных звездочек Z1 к числу зубьев нижних звездочек 27 Z2 должно быть равно Z1-2, Z2-3.
Флюгер конической формы 67 на фиг. 11 содержит цилиндрическую втулку 68 и радиальные стойки 69. При этом втулка 68 свободно перемещается в продольном направлении по горизонтальному трубчатому рычагу 70. Одним концом рычаг 70 неподвижно под углом 90° соединен с втулкой 81 флюгера 67, другим концом трос 73 связан с флюгером 67.
Натянутый по оси трубчатого рычага 70 трос 73 перемещает флюгер 67 до упора 74.
Трос 73 с помощью двух блочков 75, установленных на концах рычагов 76, неподвижно связанных со стойкой 81 флюгера 67, передает перемещение флюгера 67 на рычаг 78. Рычаг 78 неподвижно соединен с фланцем 42 и с помощью пружины 79, другой конец которой связан с втулкой флюгера 81, фиксирует начальное положение фланца 42.
Сила натяжения пружины 79 должна обеспечить необходимое усилие прижатия флюгера 67 к упору 74.
Подбирая параметры пружины, а также флюгера - площадь боковой поверхности, диаметры верхнего и нижнего торцовых сечений, возможно настроить преобразователь так, чтобы скорость вращения выходного вала не менялась при изменении скорости ветра в широком диапазоне скорости ветра от 5 до 40 м/с.
Поворот фланца 42 на угол от 0 до 30° приводит к изменению углового положения узла 6 для изменения ориентации и фиксации положения лопасти 3 (см.фиг.8).
На фиг. 11 на втулке флюгера дополнительно установлена неподвижно звездочка 82. Эта звездочка 82 с помощью цепи 29 соединяется со всеми средними звездочками 25, ориентирующими коромысла 24 лопастей 3, состоящих из двух половинок. Звездочки 82 и 25 имеют одинаковое число зубьев. Таким образом, флюгер 67, установленный в центре преобразователя, меняет ориентацию коромысел 24 всех лопастей 3.
Для изменения ориентации двух половинок лопастей 3 относительно коромысла 24 используется цепная связь между сегментными звездочками 45 и нижними звездочками 27. Отношение зубьев этих звездочек Z1/Z2, равное 2/3, обеспечивает поворот левой и правой половинок лопастей 3 во взаимно противоположных направлениях на угол ±90°. Верхние звездочки 28, в свою очередь, цепью связаны со звездочками 30, установленными на втулках 19 двух половин каждой лопасти 3. Звездочки 28 и 30 также имеют одинаковый диаметр и число зубьев.
Преобразователь движения 4 функционирует следующим образом.
На стойке 7 неподвижно установлено упорное кольцо 8, а на нем - упорный подшипник 9. Над упорным подшипником 9 установлен корпус 84 преобразователя движения 4 цилиндрической формы.
Если преобразователь движения 4 используется как автономный волновой двигатель, то его корпус 84 устанавливается на упорном кольце 8 неподвижно без упорного подшипника 9.
На стойке 7 установлен выходной вал 83 преобразователя энергии 4 с возможностью свободного вращения. На верхнем конце его неподвижно закреплена ведущая шестерня 98. На валу 83 с помощью обгонных муфт 87 установлены верхняя 88 и нижняя 89 центральные конические шестерни. В сцепление с центральной верхней шестерней входят шесть верхних шестерен-сателлитов 90. Аналогично, в сцепление с центральной нижней шестерней 89 входят шесть нижних конических шестерен-сателлитов 90.
Шестерни-сателлиты 90 установлены симметрично через равные промежутки (60°). При этом верхние и нижние шестерни-сателлиты 90 установлены одна под другой по одной вертикали. На осях вращения шестерен-сателлитов 90 установлены соответствующие храповые колёса 91. Храповые колеса 91 связаны с шестернями-сателлитами 90 через обгонные муфты 92 типа I [4], передающие вращение только в одном направлении [3]. На оси вращения шестерни-сателлита 90 установлена втулка 95, с которой жестко связаны рычаг храпового колеса 94 и наконечник 97 одного из спаренных рычагов 5. На конце рычага 94 установлена подпружиненная собачка 93, с помощью которой приводится во вращение храповое колесо 91. Вращение храпового колеса 91 передается через обгонную муфту 92 на шестерню-сателлит 90 и далее на соответствующую центральную коническую шестерню 88 или 89.
Вращение от центральных шестерен 88, 89 через соответствующие обгонные муфты 87 передается выходному валу преобразователя 83 и установленной на нем ведущей шестерне 98.
Эта шестерня 98 приводит во вращение ведомую шестерню 11, установленную на валу редуктора электрогенератора 99.
По фиг. 18 преобразователь движения приводит во вращение выходной вал как при подъеме поплавковой камеры 2, так и при его опускании. Для этого необходимо, чтобы суммарный вес поплавковой платформы 2 с лопастью был равен половине веса морской воды, вытесненной погруженной в воду частью поплавковой камеры 2.
В этом случае моменты вращения, создаваемые рычагом 5 при его подъеме и опускании, будут равны друг другу. На одной оси установлены два храповых колеса 91 и 103, которые работают по очереди. Так, при подъеме рычага 5 собачка 104 приводит к повороту колеса 103 и связанной с ним цилиндрической шестерни 101, и находящейся с ним в сцеплении шестерни 102. Затем вращение передается через обгонную муфту 92 типа 1 [4] конической шестерне-сателлиту 90. Эта шестерня 90 находится в сцеплении с центральной шестерней 88, установленной с помощью обгонной муфты 87. Обгонные муфты 87 и 92 позволяют беспрепятственно передавать вращение от всех шести шестерней-сателлитов 90 на выходной вал преобразователя 83, автоматически отключая те звенья, которые создают отрицательные моменты и препятствуют его вращению.
Аналогично работают нижние шестерни-сателлиты 90, которые через обгонные муфты 92 связаны со вторыми храповыми колесами 103 и передают вращение нижней центральной конической шестерне 89. Эта шестерня установлена на выходном валу также с помощью обгонной муфты 87.
По фиг. 19 конструкция преобразователя энергии преобразует энергию ветра, приводящую к вращению поплавковые камеры 2, а также энергию волн, приводящую к поперечным колебаниям указанных камер, в электрическую энергию. Электрогенератор с редуктором 108 установлен на неподвижном диске 109, закрепленном на верхнем торце вертикальной стойки. Вращение выходного вала через ведущую 106 и ведомую 107 шестерни передается на вал редуктора электрогенератора 108. В зависимости от скорости ветра и волн устанавливается необходимое угловое положение узла 6 изменения ориентации и фиксации положения лопастей 3, которое фиксируется с помощью фиксатора углового положения 110.
На выходе преобразователя может быть установлен также винтовой насос. В этом случае нет необходимости в синхронизации скорости вращения выходного вала преобразователя.
Преобразователь может быть использован в качестве двигателя ходового винта для лодок, которые могут плавать по морям без расхода топлива.
Источники информации
1. RU, №2125182 С1, кл. F 03 D 5/04, 20.01.1999.
2. RU, №2153599 С1, F 03 D 7/06, 27.07.2000.
3. SU, №1275114 А1, кл. F 03 D 5/00, 07.12.1986.
4. Анурьев В.И. Справочник конструктора машиностроителя. Том 2, М.: Машиностроение, 1980, стр.209-215.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 2004 |
|
RU2280782C2 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2007 |
|
RU2392487C2 |
| ВЕТРОЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО | 2005 |
|
RU2281413C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2004 |
|
RU2280785C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 2003 |
|
RU2253039C2 |
| ВЕТРОДВИГАТЕЛЬ | 2006 |
|
RU2318132C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ (ВАРИАНТЫ) | 2009 |
|
RU2409763C2 |
| КОЛЕБЛЮЩИЙ ВЕТРОДВИГАТЕЛЬ | 2009 |
|
RU2395712C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВОЛН | 2005 |
|
RU2300663C1 |
| КОЛЕБЛЮЩИЙСЯ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ (ВАРИАНТЫ) | 2008 |
|
RU2386855C1 |



Изобретение относится к области возобновляющихся источников энергии, а именно ветро- и гидроэнергии. Технический результат заключается в значительном повышении мощности преобразователя энергии и повышении чувствительности к слабым потокам ветра и воды. Преобразователь содержит взаимосвязанные через рычаги вращающиеся платформы, на каждой из которых установлена лопасть (парус), и дополнительно взаимосвязанный преобразователь движения и узел изменения ориентации и фиксации положения лопасти, установленные в центре и взаимодействующие со всеми лопастями и флюгером, установленным также в центре преобразователя. В волновом варианте преобразователя энергии ветра и волн вращающиеся платформы выполнены в виде герметичных камер обтекаемой формы, на которых установлены плоские лопасти и связанные с ними неподвижно звёздочки, с возможностью свободного вращения вокруг вертикальных стоек, при этом звёздочки через цепи и тросы кинематически связаны с соответствующими сегментными звёздочками. 7 з.п. ф-лы, 19 ил.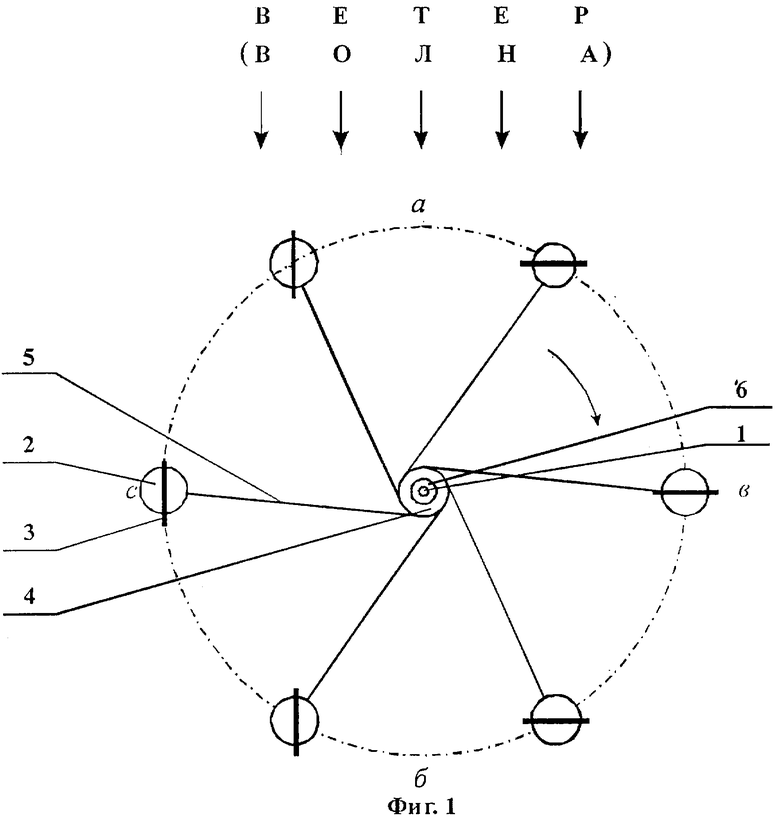
| Ветроэлектрическая установка | 1981 |
|
SU1275114A1 |
| Ветроэлектрическая установка | 1985 |
|
SU1273640A1 |
| ВЕТРОСИЛОВАЯ УСТАНОВКА | 1926 |
|
SU7108A1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1996 |
|
RU2119092C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1996 |
|
RU2125182C1 |
| ВЕТРОДВИГАТЕЛЬ | 1999 |
|
RU2153599C1 |
| DE 3125908 A1, 20.01.1983 | |||
| СПОСОБ ПРОФИЛАКТИКИ ТОКСИЧЕСКОГО ДЕЙСТВИЯ И НАКОПЛЕНИЯ КОБАЛЬТА В ТКАНЯХ У ЭКСПЕРИМЕНТАЛЬНЫХ ЖИВОТНЫХ ПРИ МОДЕЛИРОВАНИИ ХРОНИЧЕСКОГО ОТРАВЛЕНИЯ | 2006 |
|
RU2312666C1 |
| WO 00/45050 A1, 03.08.2000. | |||

