Изобретение относится к радиоэлектронике и может быть использовано для дистанционного, беспроводного контроля положения и ориентации различных механизмов.
Существуют датчики перемещения ДП1 и ДП2 [1], состоящие из первичного преобразователя (обмотки) и блока согласования, соединенных кабелем различной длины. Датчики содержат выполненную печатным способом трехобмоточную катушку, осуществляющую электромагнитную связь с измерительным кольцом (или полубесконечной плоскостью) контролируемого объекта. Питание обмотки датчика осуществляется генератором блока согласования с последующей лианеризацией и преобразованием высокочастотного сигнала в величину выходного тока. Недостатком такого датчика является необходимость подачи напряжения питания от источника постоянного тока.
Наиболее близкой к заявляемому устройству является система измерения линейных перемещений С 072 [2]. Система состоит из четырех магнитострикционных датчиков линейных перемещений ПЛИ 083 или ПЛИ 083-01, усилительно-преобразующего блока, соединенных между собой кабельной линией длиной до 10 м и четырех магнитов, закрепленных на объекте измерения. Четырехканальная система осуществляет бесконтактное измерение линейных перемещений днища сильфонного вытеснителя или других объектов контроля и преобразования информации о перемещении в электрический сигнал. Основным недостатком такого устройства является наличие проводной связи магнитострикционных датчиков с преобразующим блоком, а также необходимость подачи напряжения питания на усилительно-преобразующий блок.
Техническим результатом заявляемого устройства является отсутствие источников энергопитания в месте размещения датчика, а также исключение кабельной линии связи между датчиком и блоком обработки информационного сигнала.
Технический результат достигается тем, что радиотранспондерный датчик положения и ориентации содержит исполнительное устройство, корпус которого выполнен из немагнитного материала, а на крышке корпуса установлены четыре пластины из магниточувствительного материала с образованием между ними крестообразной щели и управляющий орган, причем исполнительное устройство состоит из двух групп герконов, первая группа состоит из четырех герконов, соединенных последовательно и подключенных к устройству на поверхностных акустических волнах (ПАВ), а вторая группа состоит из четырех герконов, каждый из которых подключен к соответствующему устройству на ПАВ, при этом первая группа герконов располагается вблизи центра крестообразной щели исполнительного устройства таким образом, что все герконы данной группы находятся на одинаковом расстоянии от центра крестообразной щели, а вторая группа герконов располагается на большем расстоянии от центра крестообразной щели таким образом, что все герконы данной группы находятся на одинаковом расстоянии от центра крестообразной щели, а управляющий орган содержит постоянные магниты. Исполнительное устройство состоит из двух групп нормально разомкнутых герконов, подключенных к устройствам на ПАВ, в качестве которых используются двухпортовые акустические резонаторы. Исполнительное устройство состоит из двух групп нормально замкнутых герконов, подключенных к устройствам на ПАВ, в качестве которых используются линии задержки. Все устройства на ПАВ, соединенные с герконами как первой, так и второй группы, подключены к общей антенне. Управляющий орган заключен в корпус из немагнитного материала. Крестообразная щель располагается непосредственно над герконами, причем герконы устанавливаются перпендикулярно осям щелей. Постоянные магниты в управляющем органе располагаются таким образом, что в статическом режиме центры магнитов совпадают с контактными сердечниками герконов первой группы. Радиотранспондерный датчик положения и ориентации содержит исполнительное устройство, корпус которого выполнен из немагнитного материала, а на крышке корпуса установлены четыре пластины из магниточувствительного материала с образованием между ними крестообразной щели и управляющий орган, причем исполнительное устройство состоит из двух групп герконов, первая группа состоит из четырех герконов, соединенных последовательно и подключенных к устройству на ПАВ, а вторая группа состоит из четырех герконов, каждый из которых подключен к соответствующим выходам устройства на ПАВ, при этом первая группа герконов располагается вблизи центра крестообразной щели таким образом, что все герконы данной группы находятся на одинаковом расстоянии от центра крестообразной щели исполнительного устройства таким образом, что все герконы данной группы находятся на одинаковом расстоянии от центра крестообразной щели, а управляющий орган содержит постоянные магниты. Исполнительное устройство состоит из двух групп нормально замкнутых герконов, подключенных к соответствующим выходам устройства на ПАВ, в качестве которого используется многоотводная линия задержки. Устройство на ПАВ, соединенное с герконами как первой, так и второй группы, подключено к общей антенне. Управляющий орган заключен в корпус из немагнитного материала. Крестообразная щель располагается непосредственно над герконами, причем герконы устанавливаются перпендикулярно осям щелей. Постоянные магниты в управляющем органе располагаются таким образом, что в статическом режиме центры магнитов совпадают с контактными сердечниками герконов первой группы.
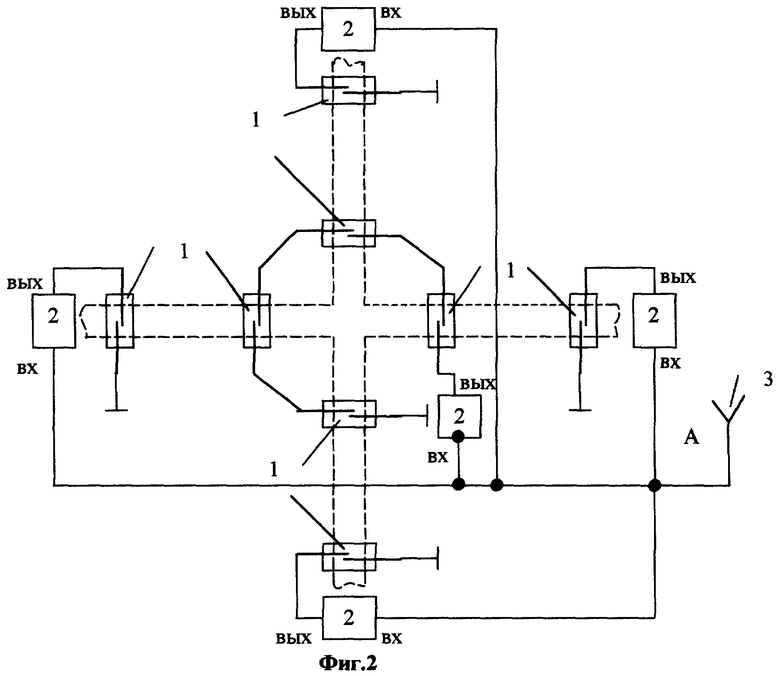
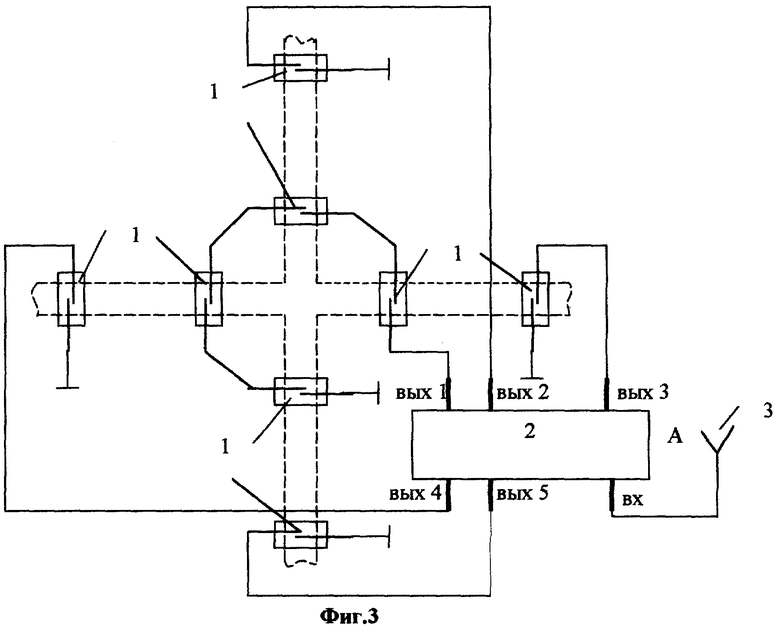
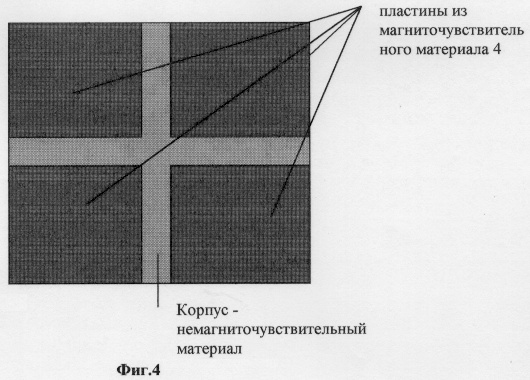
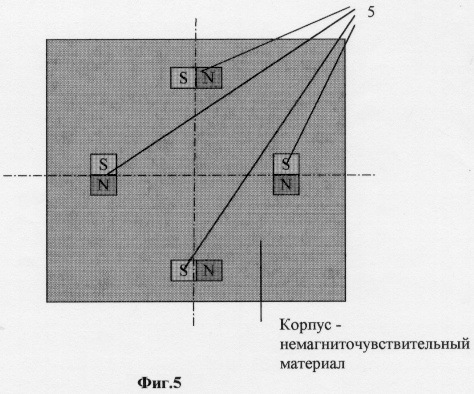
На фиг.1 схематически изображено исполнительное устройство на резонаторах, на фиг.2 - исполнительное устройство на линиях задержки, на фиг.3 - исполнительное устройство на многоотводной линии задержки, на фиг.4 показана крышка корпуса исполнительного устройства, на фиг.5 - управляющий орган, на фиг.6 показаны отраженные сигналы радиотранспондерного датчика положения и ориентации.
Возможность осуществления заявляемого изобретения подтверждается нижеприведенными материалами.
Радиотранспондерный датчик положения и ориентации содержит исполнительное устройство и управляющий орган.
Исполнительное устройство (фиг.1) состоит из двух групп герконов 1, подключенных к устройствам на ПАВ 2. Первая группа состоит из четырех герконов, соединенных последовательно и подключенных к устройству на ПАВ. Вторая группа состоит из четырех герконов, каждый из которых подключен к соответствующему устройству на ПАВ. Входы всех устройств на ПАВ соединены с антенной 3. Устройства на ПАВ настроены на одну частоту, но имеют отраженные сигналы с разными временами задержек. Первая группа герконов располагается вблизи центра крестообразной щели таким образом, что все герконы данной группы находятся на одинаковом расстоянии от центра крестообразной щели. Вторая группа герконов располагается на большем расстоянии от центра крестообразной щели таким образом, что все герконы данной группы находятся на одинаковом расстоянии от центра крестообразной щели. Исполнительное устройство имеет три варианта исполнения: две группы нормально разомкнутых герконов, подключенных между входом и выходом двухпортовых акустических резонаторов (фиг.1), две группы нормально замкнутых герконов, подключенных к выходу линий задержки (фиг.2), две группы нормально замкнутых герконов, подключенных к выходам многоотводной линии задержки (фиг.3).
Корпус исполнительного устройства выполнен из немагнитного материала (фиг.4). На крышке корпуса исполнительного устройства установлены четыре пластины 4 из магниточувствительного материала. Для увеличения точности определения положения объекта пластины устанавливаются таким образом, что образованная между ними крестообразная щель располагается непосредственно над герконами. Для увеличения точности ориентации объекта по углу герконы устанавливаются перпендикулярно осям щелей.
Корпус управляющего органа (фиг.5) выполнен из немагнитного материала. Постоянные магниты 5 располагаются таким образом, что в статическом режиме центры магнитов совпадают с контактными сердечниками герконов первой группы.
Предлагаемый датчик работает следующим образом.
Для центровки двух механизмов центр одного из них совмещается с центром крестообразной щели исполнительного устройства и закрепляется на нем. Центр другого механизма совмещается с центром управляющего органа и закрепляется на нем.
Опрос радиотранспондерного датчика происходит периодически. Инициирующий радиоимпульс с помощью антенны 3 принимается и далее передается к устройствам на ПАВ, в которых происходит прямое и обратное преобразование электрического сигнала в поверхностную акустическую волну, причем импульс оказывается задержанным по времени на определенную величину, конструктивно зависящую от самого устройства на ПАВ (разная для каждого устройства), и имеющим амплитуду, зависящую от состояния герконов (фиг.6).
Во время движения одного механизма над другим исполнительное устройство оказывается в зоне действия управляющего органа. Если один из магнитов управляющего органа оказывается в зоне срабатывания одного из второй группы герконов, то происходит срабатывание соответствующего геркона. В зависимости от варианта исполнительного устройства геркон замыкается либо размыкается и в результате в первом варианте исполнительного устройства замыкается вход и выход акустического резонатора, а во втором и третьем варианте закороченный выход линии задержки и многоотводной линии задержки отрывается от земли и появляется отраженный сигнал с временем задержки соответствующего устройства на ПАВ, подключенного к данному геркону. Появление одного из четырех отраженных импульсов говорит о местонахождении центра механизма и дает команду о дальнейшем направлении передвижения (вверх, вниз, влево, вправо). При совпадении центров (когда магниты управляющего органа находятся непосредственно над герконами первой группы) происходит одновременное срабатывание герконов первой группы, в результате в первом варианте замыкается вход и выход соответствующего резонатора, а во втором и третьем варианте закороченный выход линии задержки и многоотводной линии задержки отрывается от земли и появляется отраженный сигнал, имеющий время задержки данного устройства на ПАВ (центр).
Использование предлагаемого изобретения позволяет дистанционно контролировать положение различных механизмов и центрировать их относительно друг друга.
Литература
1. Датчики теплофизических и механических параметров. - Справочник в трех томах. Т.2 / Под общ. ред. Ю.Н.Коптева; под ред. Е.Е.Багдатьева, А.В.Гориша, Я.В.Малкова - М.: ИПРЖР, 1999. - 688 с. ил. с. 642.
2. Датчики теплофизических и механических параметров. - Справочник в трех томах. Т.2 /Под общ. ред. Ю.Н.Коптева; под ред. Е.Е.Багдатьева, А.В.Гориша, Я.В.Малкова - М.: ИПРЖР, 1999. - 688 с. ил. с. 31.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВВОДА КОДА ДОСТУПА В КОНТРОЛЛЕР ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ЗАМКА | 2006 |
|
RU2321714C1 |
| ДАТЧИК УРОВНЯ ЖИДКОСТИ | 2005 |
|
RU2284482C1 |
| Измеритель толщины среза | 1982 |
|
SU1094962A1 |
| Сигнализатор уровня жидкости | 2022 |
|
RU2787690C1 |
| ТРАНСПОНДЕР | 1997 |
|
RU2133482C1 |
| ВНУТРИТРУБНЫЙ ДЕТЕКТОР ВРЕЗОК (ВАРИАНТЫ) | 2005 |
|
RU2280810C1 |
| УСТРОЙСТВО ВКЛЮЧЕНИЯ ПРОТИВОУГОННОЙ СИГНАЛИЗАЦИИ | 1996 |
|
RU2104184C1 |
| КОММУТИРУЮЩЕЕ УСТРОЙСТВО ВЗРЫВОЗАЩИЩЕННОЕ | 2012 |
|
RU2501113C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ИЗ МАГНИТНОГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2510888C1 |
| Бесконтактный датчик тока на поверхностных акустических волнах | 2021 |
|
RU2779616C1 |
Изобретение относится к радиоэлектронике и может быть использовано для дистанционного, беспроводного конроля положения и ориентации различных механизмов. Техническим результатом является отсутствие источников энергопитания в месте размещения датчика и исключение кабельной линии связи между датчиком и блоком обработки информационного сигнала. Радиотранспондерный датчик положения и ориентации содержит исполнительное устройство, корпус которого выполнен из немагнитного материала, а на крышке корпуса установлены четыре пластины из магниточувствительного материала с образованием между ними крестообразной щели и управляющий орган, причем исполнительное устройство состоит из двух групп герконов, первая группа состоит из четырех герконов, соединенных последовательно и подключенных к устройству на ПАВ, а вторая группа состоит из четырех герконов, каждый из которых подключен к соответствующему устройству на ПАВ, при этом первая группа герконов располагается вблизи центра крестообразной щели исполнительного устройства таким образом, что все герконы данной группы находятся на одинаковом расстоянии от центра крестообразной щели, а вторая группа герконов располагается на большем расстоянии от центра крестообразной щели таким образом, что все герконы данной группы находятся на одинаковом расстоянии от центра крестообразной щели, при этом все устройства на ПАВ, соединенные с герконами как первой, так и второй группы, подключены к общей антенне, а управляющий орган содержит постоянные магниты. 2 н. и 9 з.п. ф-лы, 6 ил.
| КОПТЕВ Ю.Н | |||
| и др., Датчики теплофизических и механических параметров | |||
| М.: ИПРЖР, 1999 - Справочник в трех томах, т.2, с.31 | |||
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТА | 1997 |
|
RU2126980C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2098297C1 |
| US 4096477 A, 20.06.1978 | |||
| US 4737790 A, 12.04.1988 | |||
| DE 4336898 А, 01.06.1995. | |||

