Устройство для эксплуатации погружного электронасосного агрегата в нефтегазовой скважине относится к области добычи нефти и может быть использовано для повышения эффективности работы скважины.
Известно устройство, реализующее способ автоматического регулирования режима работы скважины, оборудованной погружным центробежным электронасосом [1]. Устройство содержит установленный в скважине погружной центробежный электронасос, включающий собственно насос и погружной приводной электродвигатель с глубинным манометром-термометром и протектором, насосно-компрессорные трубы, станцию управления с силовым трансформатором и силовым токоподводящим кабелем, глубинный канал связи, частотный преобразователь, регулируемый штуцер, обратный клапан и манометры, установленные на выкидной линии.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, относится то, что данное устройство в реальном времени не может определить оптимальный режим работы системы “пласт - скважина - погружной насос” и поддерживать его, поскольку в устройстве отсутствуют блоки идентификации и адаптивный регулятор. Кроме того, дросселирование на устье скважины не обеспечивает энергосберегающие режимы работы электронасоса и потенциальный дебит скважины.
Наиболее близким по совокупности признаков к заявляемому устройству является устройство для осуществления способа эксплуатации погружных центробежных насосных агрегатов в группе скважин [2]. Устройство содержит установленные в скважинах погружные центробежные насосные агрегаты с кабелями питания их электродвигателей, преобразователь частоты напряжения, датчики параметров состояния каждой скважины и ее насосного агрегата, подключенные к системе измерения и формирования сигналов управления электродвигателями, коммутирующие устройства для связи кабелей питания электродвигателей с промысловой электросетью и преобразователем частоты напряжения, блок определения оптимальной последовательности воздействий сигналами управления. Это устройство принято за прототип.
К причинам, препятствующим достижению указанного ниже технического результата, относится то, что используемая в данном устройстве система измерения и формирования сигналов управления электродвигателями обеспечивает управление электронасосными агрегатами только по предварительно определенному заданию без привязки к изменяемым в реальном времени параметрам системы “пласт - скважина - погружной насос” и призабойной зоны пласта. Данное устройство не обеспечивает оптимальный режим работы скважин и качество переходных процессов при переключении питания электронасосных агрегатов.
Сущность изобретения заключается в том, что в устройство для эксплуатации погружного электронасосного агрегата в нефтегазовой скважине, содержащее установленный в скважине погружной электронасосный агрегат с кабелем питания его электродвигателя, блок погружной телеметрии с датчиками параметров состояния скважины и электронасосного агрегата, измеритель дебита, установленный на выкидной линии, преобразователь частоты напряжения, снабженный контроллером и соединенный со станцией управления, снабженной контроллером и подключенной к кабелю питания электродвигателя, задатчик режима работы, дополнительно введены адаптивный регулятор, блок динамической модели системы “пласт - скважина - погружной насос”, блок идентификации динамической модели, блок идентификации параметров призабойной зоны пласта. При этом выходы задатчика режима работы соединены с входами адаптивного регулятора, блока динамической модели системы “пласт - скважина - погружной насос” и блока идентификации параметров призабойной зоны пласта, выход которого соединен с входом задатчика режима работы, выход измерителя дебита соединен с входами блока идентификации динамической модели и блока идентификации параметров призабойной зоны пласта, вторые входы которых соединены с выходом станции управления, второй выход которой соединен со вторым входом адаптивного регулятора, выход которого подключен к входу преобразователя частоты напряжения, выходы блока динамической модели системы “пласт - скважина - погружной насос” и блока идентификации динамической модели соединены с третьим и четвертым входами адаптивного регулятора.
Достигаемый технический результат - повышение качества регулирования погружного электронасосного агрегата на заданные показатели производительности, сокращение времени переходных процессов, снижение нагрузки на электронасосный агрегат и затрат электроэнергии за счет учета реальных динамических характеристик системы “пласт - скважина - погружной насос”.
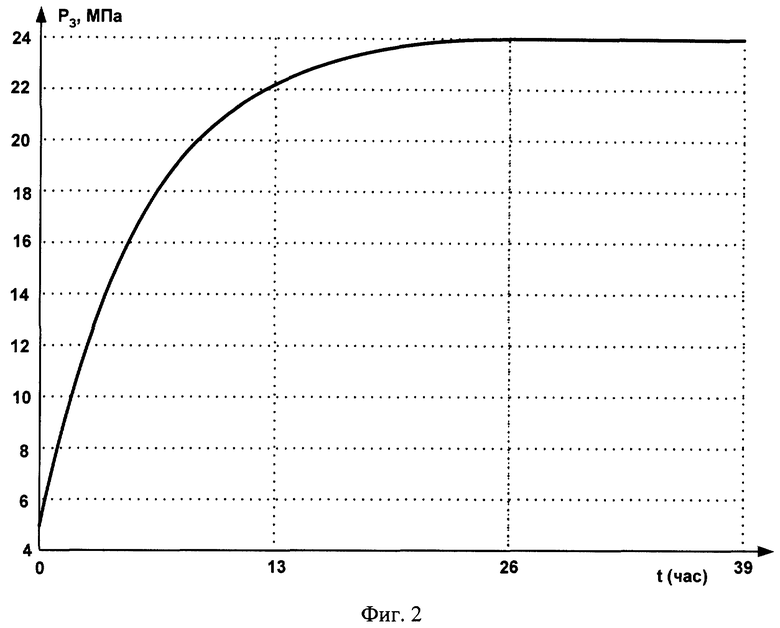
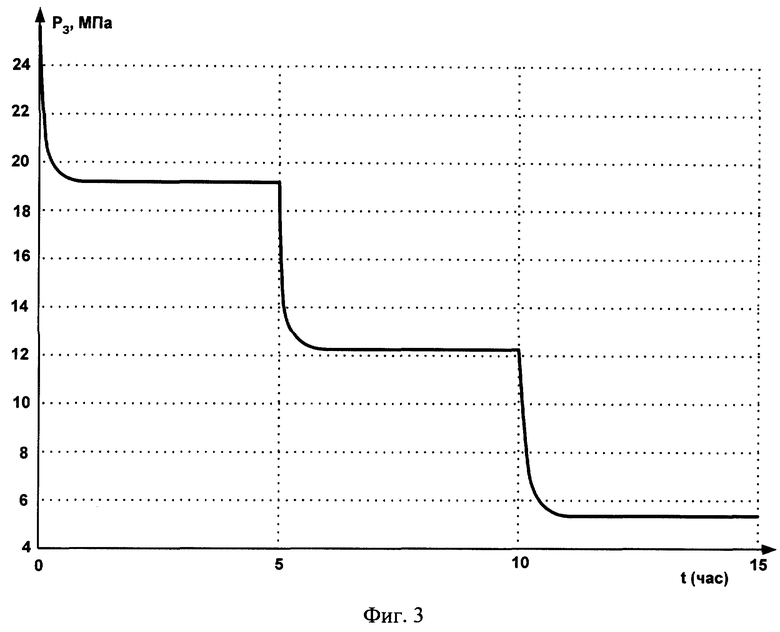
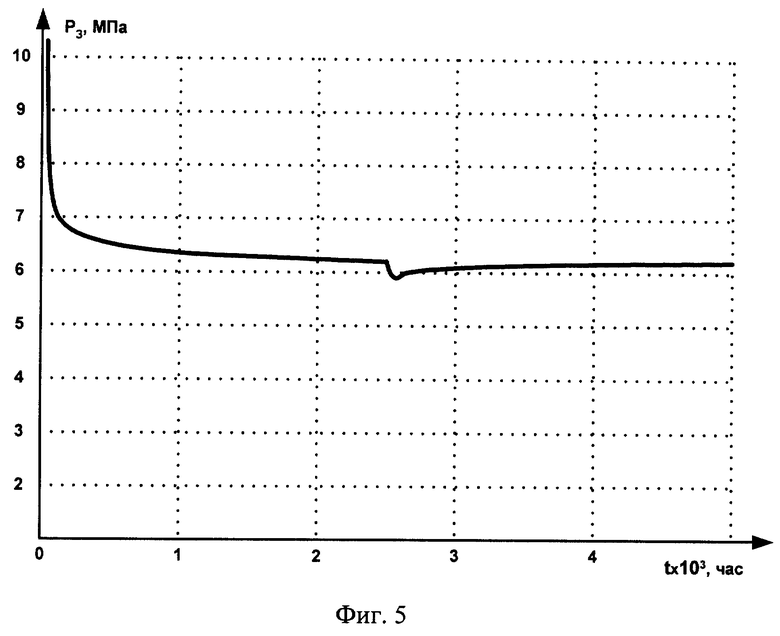
На фиг.1 представлена структурная схема скважины, оборудованной погружным электронасосным агрегатом; на фиг.2 - график кривой восстановления давления; на фиг.3 - график индикаторной диаграммы; на фиг.4 - график расчетной характеристики скин-фактора; на фиг.5 - графики изменения забойного давления при выводе скважины на режим и его поддержания.
Скважина, оснащенная погружным электронасосным агрегатом (фиг.1), содержит продуктивный пласт 1, эксплуатационную колонну 2, погружной приводной электродвигатель 3 с датчиком 4 температуры внутри его корпуса, насос 5, колонну 6 насосно-компрессорных труб, силовой токоподводящий кабель 7, блок 8 погружной телеметрии с датчиками 9 давления и 10 температуры скважинной жидкости на приеме насоса 5, датчиками 11 и 12 виброускорений в двух плоскостях корпуса электродвигателя 3, измеритель 13 дебита, например автоматическую групповую замерную установку, объемную или весовую, в выкидной линии 14 скважины, станцию 15 управления с встроенным контроллером и силовым трансформатором (на фиг.1 условно не показаны), преобразователь 16 частоты напряжения с встроенным контроллером (на фиг.1 условно не показан), задатчик 17 режима работы, адаптивный регулятор 18, блок 19 динамической модели системы “пласт - скважина - погружной насос”, блок 20 идентификации динамической модели, блок 21 идентификации параметров призабойной зоны пласта.
Источником скважинной жидкости является продуктивный пласт 1, сообщение с которым осуществляется через перфорационные отверстия в обсадной колонне 2 скважины. Основными параметрами погружного электронасосного агрегата, состоящего из насоса 5, например центробежного, и погружного приводного электродвигателя 3, является производительность QЖ (м3/сут), развиваемый напор Н (м вод. ст.), а также наличие на приеме насоса 5 давления не ниже заданного значения при различных частотах fI на выходе преобразователя 16 частоты напряжения. Погружной приводной электродвигатель 3 образует совместно с преобразователем 16 частоты напряжения и станцией 15 управления частотно-регулируемый привод, с помощью которого осуществляется управление частотой n вращения ротора электродвигателя 3 и, соответственно, насоса 5.
Силовой токопроводящий кабель 7 служит для подвода электроэнергии к погружному приводному электродвигателю 3 и передачи сигналов от блока 8 погружной телеметрии, включающего датчики 9 - 12, на поверхность.
Измеритель 13 дебита скважинной жидкости измеряет текущий дебит скважины, в том числе с разделением по продукту и воде.
Станция 15 управления с встроенным контроллером и силовым трансформатором предназначена для управления, питания и защиты погружного приводного электродвигателя 3, обработки сигналов блока 8 погружной телеметрии и, совместно с преобразователем 16 частоты напряжения, для регулирования скорости вращения роторов погружного приводного электродвигателя 3 и насоса 5.
Задатчик 17 режима эксплуатации скважины, выполненный обычно в виде автоматизированного рабочего места оператора (технолога) на основе персонального компьютера, установленного в диспетчерском пункте цеха добычи нефти, служит для вычисления потенциального дебита скважины в соответствии с ее гидродинамическими параметрами, задания выбранного оператором режима работы системы “пласт - скважина - погружной насос” и ввода сигнала управления в адаптивный регулятор 18.
Блок 19 динамической модели в соответствии с режимом работы системы “пласт - скважина - погружной насос” определяет ее расчетные параметры и совместно с адаптивным регулятором 18 служит для обеспечения потенциального дебита скважины.
Блок 20 идентификации динамической модели определяет фактические параметры системы “пласт - скважина - погружной насос” в соответствии с ее выбранной расчетной моделью.
Блок 21 идентификации параметров призабойной зоны пласта определяет гидродинамические параметры скважины для выбора с помощью задатчика 17 режима требуемого значения потенциального дебита.
Адаптивный регулятор 18 и блоки 19, 20 и 21 как функциональные звенья предлагаемого устройства могут быть реализованы программным (цифровым) способом с помощью программируемых контроллеров, в том числе контроллеров станции 15 управления и преобразователя 16 частоты напряжения.
Устройство работает следующим образом.
Жидкость из пласта 1 притекает через перфорационные отверстия в эксплуатационную колонну 2 скважины. Погружной приводной электродвигатель 3, снабженный датчиком 4 температуры внутри его корпуса, вращает ротор насоса 5. Далее жидкость по колонне 6 насосно-компрессорных труб подается на поверхность. Электропитание погружного приводного электродвигателя осуществляется по силовому токоподводящему кабелю 7. Датчики 9 и 10 блока 8 погружной телеметрии измеряют давление РПР и температуру ТПР на приеме насоса, датчики 11 и 12 - виброускорения αх и αY в двух плоскостях корпуса электродвигателя 3, а также насоса 5 с учетом их жесткого соединения и наличия общего ротора (вала). Информационные сигналы от блока 8 погружной телеметрии, включающего датчики 9-12, подаются в модулированной форме по силовому токоподводящему кабелю 7 на поверхность в станцию 15 управления. Измеритель 13 дебита скважинной жидкости, установленный в выкидной линии 14, измеряет текущий дебит скважины. Управление электропитанием с обеспечением необходимых защит от нештатных режимов по току, напряжению, температуре ТД внутри корпуса и виброускорениям αX и αY погружного приводного электродвигателя 3 осуществляет станция 15 управления.
Преобразователь 16 частоты напряжения устанавливает и регулирует (поддерживает) режим работы динамической системы “пласт - скважина - погружной насос” путем изменения производительности насосной установки в функции забойного давления скважины, соответствующей условию согласования характеристики истечения скважины, определяемой производительностью насоса 3, и характеристики притока скважины (реальной индикаторной диаграммы скважины).
Проведение гидродинамических исследований (ГДИ) скважины, в частности снятие КВД и индикаторной диаграммы (ИД), в общем случае сопряжено с трудоемкими работами, связанными с необходимостью замеров давления на забое глубинными манометрами, либо “отбивкой” динамического уровня. Предлагаемое устройство существенно облегчает эти процедуры, позволяя строить КВД и ИД в автоматическом режиме без дополнительных спускоподъемных операций.
С выхода измерителя 13 дебита на первый вход блока 21 идентификации параметров призабойной зоны пласта подается сигнал текущего дебита QЖ, с выхода станции 15 управления, обрабатывающий сигнал блока 8 погружной телеметрии, на второй вход блока 21 подается сигнал давления PПР на приеме насоса 5.
При подаче с выхода задатчика 17 режима сигнала остановки скважины в блоке 21 идентификации определяется КВД. При этом по показаниям датчика 9 через определенные промежутки времени там же регистрируются значения давления РПР скважинной жидкости на приеме насоса 5, пересчитываются в значения забойного давления РЗ, строится КВД (фиг.2).
Пластовое давление РПЛ определяется как значение РЗ, при котором КВД принимает положение, близкое к горизонтальному. По значению пластового давления рассчитывается депрессия ΔPД на каждом из режимов:
ΔPД=PПЛ-PЗ.
ИД определяется методом установившихся режимов. Для этого с выхода задатчика 17 режима подается сигнал управления преобразователем 16 частоты напряжения. Адаптивный регулятор 18 отрабатывает заданный сигнал, приводя систему “пласт - скважина - погружной насос” в установившийся режим. Данные о давлении скважинной жидкости на приеме насоса (РПР) с выхода датчика 9 давления и о дебите скважинной жидкости с выхода измерителя 13 дебита подаются в блок 21 идентификации параметров призабойной зоны пласта для построения ИД в виде РЗ=РЗ(QЖ) и ее дальнейшей интерпретации в классическую форму QЖ=QЖ(ΔРД) (фиг.3).
Коэффициент продуктивности К скважины также определяется на установившихся режимах, когда приток из скважины (QС) равен заданному отбору жидкости (QЖ). Для этого на графике зависимости QЖ=QЖ(ΔРД) определяется угловой коэффициент прямолинейного участка кривой, который является значением коэффициента продуктивности:

По КВД также рассчитывается скин-фактор, например по методике, согласно которой строится кривая зависимости ΔP=ΔP(lnt) и находится значение углового коэффициента i.
Выражение для определения ΔР=ΔP(lnt) имеет вид [3]:
 или ΔР=ilnt-A,
или ΔР=ilnt-A,
где 
k - проницаемость коллектора;
μ - динамическая вязкость нефти в пластовых условиях;
h - эффективная толщина пласта;
χ - пьезопроводность;
rс - радиус скважины;
S - скин-фактор.
Отсюда находят параметры:

где ε - гидропроводность пласта.
Тогда проницаемость коллектора:

Пьезопроводность и приведенная пьезопроводность рассчитываются соответственно как:

где m - открытая пористость;
βЖ - сжимаемость жидкости;
βП - сжимаемость поровых каналов;
rпp - приведенный радиус.
Приведенный радиус скважины:
Скин-фактор:

Другим распространенным методом расчета скин-фактора является определение значения давления в скважине РС, являющееся точкой пересечения продолжения прямолинейного участка графика с осью ординат (фиг.4).
Далее скин-фактор рассчитывается по формуле [4]:

где b - объемный коэффициент нефти.
Такие параметры, как эффективная толщина пласта h, вязкость жидкости μ, открытая пористость m, сжимаемость жидкости βЖ и сжимаемость поровых каналов βП полагают известными.
Гидропроводность также можно рассчитать с использованием коэффициента продуктивности из формулы [5]:

где Rk - радиус контура питания.
Таким образом, в блоке 21 идентификации параметров призабойной зоны пласта в режиме реального времени определяются потенциальный дебит скважины и гидродинамические параметры призабойной зоны пласта.
В зависимости от сигнала задания режима, формируемого преобразователем 16 частоты напряжения по сигналу задатчика 17 режима, погружной приводной электродвигатель 3 вращает с определенной частотой ротор насоса 5, откачивающего скважинную жидкость QЖ.
Для построения алгоритма оптимального управления на выбранном режиме система “пласт - скважина - погружной насос” описана линеаризованными уравнениями в виде последовательных апериодических звеньев с передаточными функциями:

где kЭЦН, ТЭЦН - коэффициент передачи и постоянная времени соответственно электронасосного агрегата;
kСКВ, ТСКВ - коэффициент передачи и постоянная времени соответственно скважины;
p - оператор Лапласа.
Блок 19 динамической модели системы “пласт - скважина - погружной насос” воспроизводит ее в виде двух последовательно соединенных апериодических звеньев:

где  - расчетные коэффициент передачи и постоянная времени соответственно электронасосного агрегата;
- расчетные коэффициент передачи и постоянная времени соответственно электронасосного агрегата;
 - расчетные коэффициент передачи и постоянная времени соответственно скважины.
- расчетные коэффициент передачи и постоянная времени соответственно скважины.
В первом звене - расчетной модели электронасосного агрегата сигнал напряжения определенной частоты и амплитуды Uf преобразуется в дебит скважинной жидкости QЖ. Во втором звене - расчетной модели “пласт - скважина” откачивание скважинной жидкости QЖ приводит к изменению забойного давления РЗ. Постоянную времени первого звена  можно определить по данным испытаний электронасосного агрегата. Постоянную времени
можно определить по данным испытаний электронасосного агрегата. Постоянную времени  системы “пласт - скважина” (второго звена) можно определить из предварительно снятой КВД. При этом
системы “пласт - скважина” (второго звена) можно определить из предварительно снятой КВД. При этом 
Расчетную модель системы “пласт - скважина - погружной насос” во всем диапазоне режимов работы можно также представить в виде системы дифференциальных уравнений:

где АP, ВP, CP, DP - заданные матрицы расчетных коэффициентов;

Реальная система “пласт - скважина - погружной насос” является нелинейным непрерывным объектом, описываемым уравнениями:
где А, В, С, D - матрицы коэффициентов;

H(QЖ); G(Uf); U(Pз); R(QЖ) - нелинейные функции.
Блок 20 идентификации динамической модели содержит модель идентифицируемых параметров [6] системы “пласт - скважина - погружной насос”:

где матрицы АМ, ВМ, СМ, DМ включают перестраиваемые коэффициенты аМ, bM, cM, dM, равные по окончании процесса идентификации коэффициентам а, b, с, d уравнений, описывающих систему “пласт - скважина - погружной насос”.
Для минимизации разностей коэффициентов ΔA=A-AM; ΔВ=В-ВM; ΔС=С-CM; ΔD=D-DM выбраны функции Ляпунова в виде положительно определенных квадратичных форм:

где К, L, М, N - положительные определенные диагональные матрицы заданных постоянных коэффициентов;
ΔАT, ΔВT, ΔСT, ΔDT - транспонированные матрицы разностей коэффициентов.
В режиме реального времени блок 20 идентификации динамической модели определяет коэффициенты матриц АM, ВM, CM, DМ и выдает управляющие сигналы на адаптивный регулятор 18. Процесс идентификации устойчиво сходим.
Сравнение расчетных коэффициентов матриц АP, ВP, СP, DP и идентифицируемых коэффициентов матриц АM, ВM, CM, DМ происходит в адаптивном регуляторе 18. Сигналы разностей коэффициентов уравнений, описывающих реальную систему “пласт - скважина - погружной насос”, и эталонных коэффициентов δA=AM-AP; δB=bM-bP; δC=CM-CP; δD=DM-DP служат для настройки адаптивного регулятора 18.
Сигнал управления погружным насосом на выходе адаптивного регулятора 18 имеет вид:

С целью обеспечения устойчивости динамической системы “пласт - скважина - погружной насос” задана функция Ляпунова в виде положительно определенной квадратичной формы

где Р - положительно определенная матрица коэффициентов.
Управление w ищется в виде:

где 
Гиперплоскость σ переключения управления в скользящем режиме:

Адаптивный регулятор 18, блок 19 динамической модели системы “пласт - скважина - погружной насос”, блок 20 идентификации динамической модели, блок 21 идентификации параметров призабойной зоны пласта могут быть реализованы в виде программных блоков с помощью кустового контроллера или компьютера автоматизированного рабочего места оператора, на основе которого реализован задатчик 17 режима.
Литература
1. Пат. 2140523 RU, МПК Е 21 В 43/00. Способ автоматического регулирования режима работы скважины, оборудованной погружным центробежным насосом /В.О.Кричке (RU). - 97110564/03; Заявл. 24.06.99; Опубл. 10.04.01.
2. Пат. 2050472 RU, МПК F 04 D 15/00, F 04 D 13/10, Е 21 В 43/12. Способ эксплуатации погружных центробежных насосных агрегатов в группе скважин и устройство для его осуществления /П.Т.Семченко, И.А.Гордон (RU). - 5023311/06; Заявл. 23.12.91; Опубл. 20.12.95.
3. Регламент гидродинамических исследований нефтедобывающих и водонагнетательных скважин на нефтяных и нефтегазовых месторождениях №13-С01-01. М.: - НК “ЮКОС ЭП”, 2002. - С.42.
4. Персиянцев М.Н. Добыча нефти в осложненных условиях. - М.: Недра, 2000. - С.307.
5. Методика расчета забойного давления и потенциального дебита скважин. - Уфа: 000 “ЮганскНИПИнефть”, 2001. - С.31.
6. Справочник по теории автоматического управления /Под ред. А.А.Красовского. - М.: Наука. Гл. ред. физ. - мат. лит., 1987. - С.254.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНАЯ АВТОМАТИЧЕСКАЯ ЦИФРОВАЯ ИНТЕЛЛЕКТУАЛЬНАЯ СКВАЖИНА | 2018 |
|
RU2689103C1 |
| СКВАЖИННАЯ НАСОСНАЯ УСТАНОВКА | 2005 |
|
RU2285155C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ ПОГРУЖНЫМ ЭЛЕКТРОНАСОСОМ С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ | 2003 |
|
RU2250357C2 |
| СПОСОБ ОТКАЧКИ НЕФТИ ИЗ СКВАЖИН С БОЛЬШИМ ГАЗОСОДЕРЖАНИЕМ И ЭЛЕКТРОПОГРУЖНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2380521C2 |
| СПОСОБ ДОБЫЧИ ФЛЮИДА ИЗ ПЛАСТОВ ОДНОЙ СКВАЖИНЫ ЭЛЕКТРОПРИВОДНЫМ НАСОСОМ С ЭЛЕКТРИЧЕСКИМ КЛАПАНОМ И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2008 |
|
RU2385409C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ С ПОГРУЖНЫМ ЦЕНТРОБЕЖНЫМ НАСОСОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2165037C2 |
| Способ управления бурением скважин с автоматизированной системой оперативного управления бурением скважин | 2018 |
|
RU2701271C1 |
| СПОСОБ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ДОБЫЧИ НЕФТИ ИЗ ПЛАСТОВ ОДНОЙ СКВАЖИНЫ С ПОГРУЖНОЙ НАСОСНОЙ УСТАНОВКОЙ (ВАРИАНТЫ) | 2007 |
|
RU2344274C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ПРИЗАБОЙНОЙ ЗОНЫ ПЛАСТА | 2018 |
|
RU2687828C1 |
| СПОСОБ ГИДРОДИНАМИЧЕСКИХ ИССЛЕДОВАНИЙ НЕФТЯНЫХ СКВАЖИН, ОБОРУДОВАННЫХ ЭЛЕКТРОЦЕНТРОБЕЖНЫМИ НАСОСАМИ С ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ ТОКА | 2011 |
|
RU2475640C2 |

Изобретение относится к нефтегазовой промышленности. Обеспечивает повышение качества регулирования погружного электронасосного агрегата на заданные показатели производительности. Сущность изобретения: устройство содержит установленный в скважине погружной электронасосный агрегат с кабелем питания его электродвигателя. Устройство также содержит задатчик режима работы, блок погружной телеметрии с датчиками параметров состояния скважины и электронасосного агрегата, измеритель дебита, установленный на выкидной линии, преобразователь частоты напряжения, соединенный со станцией управления. Последняя подключена к кабелю питания электродвигателя. Согласно изобретению в устройство дополнительно введены адаптивный регулятор, блок динамической модели системы “пласт - скважина - погружной насос”, блок идентификации динамической модели, блок идентификации параметров призабойной зоны пласта. 5 ил.

Устройство для эксплуатации погружного электронасосного агрегата в нефтегазовой скважине, содержащее установленный в скважине погружной электронасосный агрегат с кабелем питания его электродвигателя, блок погружной телеметрии с датчиками параметров состояния скважины и электронасосного агрегата, измеритель дебита, установленный на выкидной линии, преобразователь частоты напряжения, соединенный со станцией управления, подключенной к кабелю питания электродвигателя, задатчик режима работы, отличающееся тем, что в устройство дополнительно введены адаптивный регулятор, блок динамической модели системы “пласт - скважина - погружной насос”, блок идентификации динамической модели, блок идентификации параметров призабойной зоны пласта, при этом выходы задатчика режима работы соединены с входами адаптивного регулятора, блока динамической модели системы “пласт - скважина - погружной насос” и блока идентификации параметров призабойной зоны пласта, выход которого соединен с входом задатчика режима работы, выход измерителя дебита соединен с входами блока идентификации динамической модели и блока идентификации параметров призабойной зоны пласта, вторые входы которых соединены с выходом станции управления, второй выход которой соединен со вторым входом адаптивного регулятора, выход которого подключен к входу преобразователя частоты напряжения, выходы блока динамической модели системы “пласт - скважина - погружной насос” и блока идентификации динамической модели соединены с третьим и четвертым входами адаптивного регулятора.
| СПОСОБ ЭКСПЛУАТАЦИИ ПОГРУЖНЫХ ЦЕНТРОБЕЖНЫХ НАСОСНЫХ АГРЕГАТОВ В ГРУППЕ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2050472C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ СКВАЖИНЫ, ОБОРУДОВАННОЙ ПОГРУЖНЫМ ЦЕНТРОБЕЖНЫМ ЭЛЕКТРОНАСОСОМ | 1997 |
|
RU2140523C1 |
| Способ эксплуатации скважинного насоса с частотно-регулируемым приводом | 1985 |
|
SU1262026A1 |
| Способ регулирования многосекционного электродвигателя скважинной насосной установки и скважинная насосная установка | 1988 |
|
SU1643794A1 |
| Способ управления скважинным насосом с погружным электродвигателем | 1989 |
|
SU1740634A1 |
| US 3568771 А, 09.03.1971 | |||
| US 4581613 А, 08.04.1986. | |||

