Изобретение относится к области управления разработкой объектов нефтегазовых месторождений, в том числе со сложным геологическим строением, способов управления бурением скважин при освоении месторождений.
В соответствии со сложившейся практикой, на этапе подготовки к промышленной эксплуатации месторождения углеводородов, осуществляют выделение объектов эксплуатации и расстановку фонда скважин. При разработке мероприятий по восстановлению добычи на старых месторождениях также осуществляют проектные мероприятия, в том числе, по определению фонда скважин. Фонд скважин характеризуется функциональным назначением, траекторными параметрами и технологическим регламентом. Особую актуальность представляют собой разработки месторождений со сложным геологическим строением, которые характеризуются:
- осложненным литологическим строением, обусловленным тектоническими нарушениями;
- латеральной и вертикальной неоднородностью (неоднородность по составу и структуре строения);
- наличием нескольких горизонтов с различной насыщенностью и различными коллекторскими свойствами, с флюидами, имеющими различные свойства;
- наличием специфических водоняфтяных зон.
Кроме того, также актуальной является проблема освоения залежей с низкопроницаемыми коллекторами и высоковязкой нефтью.
Однако, как показывает опыт, при осуществлении проектных решений зачастую выявляются расхождения проектных и фактических показателей [Гавура В.Е. Геология и разработка нефтяных и газовых месторождений. - М.: ВНИИОЭНГ, 1995]. Это объясняется, в основном, ограниченным количеством фактического материала, низкой достоверностью принятых значений параметров пластов и флюидов, несовершенством применяемых моделей и расчетов. Объект разработки, определяемый как группа пластов (пласт) со схожими геолого-физическими свойствами, фазовым составом и режимом, может включать в себя пласты неоднородные по составу и строению. Использование метода аналогий не всегда дает корректный результат.
Бурение является одним из важнейших процессов разработки месторождений. Согласно существующему подходу к бурению скважин траекторию бурения и технологический регламент поддерживают согласно проекта, предусматривающего бурение до определенного забоя с последующими геофизическими и геологическими исследованиями. [Беляков Н.В. Интегрированные геофизические исследования бурящихся скважин. - М.:Из-во «Физматкнига», 2008]. Если результат отрицательный, то скважина перебуривается. Если результат приемлемый - подбирается режим эксплуатации, наиболее приемлемый для полученных параметров коллектора. Т.е. вначале пробурили - затем определяют, как добывать. Использование геонавигации (LWD - системы) лишь отчасти усовершенствует процесс, т.к. используемые в составе компоновки низа буровой колонны (КНБК) телеметрические системы используют беспроводные каналы связи (гидравлические и электромагнитные) с очень низкой скоростью передачи данных (низкая пропускная способность), поэтому информационное обеспечение в процессе бурения позволяет решать только простые задачи, например, движение бурового инструмента в горизонтальной плоскости по пласту без пересечения его границ.
Известно [Технология бурения нефтяных и газовых скважин/Басарыгин Ю.М., Булатов А.И., Проселков Ю.М., 2001 г. (URL:http:www.petrolibraru.ru)], что распространение получили три основных способа бурения - роторный, турбинно-роторный и электробурение. Достоинства и недостатки этих способов известны.
При роторном способе вращение бурового долота осуществляется путем вращения всей буровой колонны. Диапазон скоростей 30 - 150 об/мин. Достоинствами способа являются: достаточно высокая скорость бурения при максимально простой КНБК; низкая аварийность из-за прихватов буровой колонны; нет проблем бурения с любой (кроме аэрированной) промывочной жидкостью; относительно низкое давление в промывочном тракте. К недостаткам способа следует отнести: сравнительно высокие требования к механическим и ресурсным характеристикам труб буровой колонны; ограничения по скорости вращения долота; определенные проблемы при бурении на депрессии; существенная сложность наземного оборудования со значительными массо-габаритными показателями; используемая забойная телеметрия с гидравлическим каналом связи (специальная кабельная телеметрия не используется в связи с технологическими ограничениями) обладает низкой пропускной способностью (единицы бит/сек.) и не обеспечивает передачу достаточного объема информации в режиме реального времени, тем самым ограничивая возможности автоматизации и расширения функциональных возможностей буровой системы.
Роторно-турбинное бурение осуществляется компоновкой, обязательно включающей в свой состав забойный гидравлический (турбинный или винтовой) двигатель. Двигатель приводится во вращение потоком бурового раствора. К достоинствам способа относятся: возможность бурения при высоких скоростях вращения долота; относительно невысокие требования к механическим и ресурсным характеристикам труб буровой колонны; относительно простое наземное оборудование. Недостатками являются: система промывки одновременно является приводной для забойного двигателя и, как следствие, возникают сложности оптимизации режима работы забойного двигателя и параметров промывки забоя; невысокий кпд бурового двигателя; высокое давление бурового раствора; невозможность бурения на депрессии и на аэрированных буровых растворах. Кроме того, также как и при роторном бурении, использование аналогичной телеметрии приводит к тем же недостаткам.
Электробурение находилось на стадии широкого промышленного экспериментального применения вплоть до 2012 г. в отдельных регионах нашей страны. Этот способ характерен применением погружного электродвигателя для вращения бурового долота. Подключение этого электродвигателя к источнику электроэнергии осуществляется посредством разъемных секций кабеля, встроенных в буровые трубы (электротрубы). Главные достоинства способа: широкие возможности автоматизации бурения за счет реализации простой и эффективной скважинной телеметрической аппаратуры, использующей в качестве среды передачи сигналов силовые цепи питания погружного электродвигателя; возможность оптимального бурения на депрессии с использованием любых растворов, включая аэрированные; низкое давление в промывочном тракте. Основной недостаток способа - это необходимость в электротрубах. Это достаточно сложное и дорогое изделие, требующее в процессе эксплуатации высокой технологической дисциплины.
С учетом роста сложности технологического процесса разбуривания месторождений, имеющих сложное геологическое строение, системы электробурения являются хорошей основой для эффективного бурения скважин с любой траекторией в различных горно-геологических условиях. Современный уровень техники позволяет создать высокоэффективную систему электробурения.
Известен электробур [Бурение нефтяных и газовых скважин/ Середа Н.Г., Соловьев Е. М. Учебник для вузов. - 2-е изд., М: «Недра», 1988] состоящий из электродвигателя, шпинделя и системы защиты от проникновения промывочной жидкости. Электродвигатель представляет собой высоковольтную трехфазную маслонаполненную систему с короткозамкнутым секционированным ротором. Выходные концы обмотки статора подсоединены к силовому подводящему кабелю. Ротор состоит из полого вала с секциями короткозамкнутых обмоток. Электротрубы выполнены с центральным расположением кабельных секций. В наземном оборудовании реализован токоподвод посредством трансформатора по схеме с изолированной нейтралью по вторичной обмотке через контактный токоподвод, расположенный между вертлюгом и ведущей буровой трубой. Система обеспечивает высокие технико-экономические показатели при строгом соблюдении технологических регламентов эксплуатации. Существенными недостатками известной системы электробурения являются:
- сравнительно низкий кпд используемого асинхронного двигателя (63 - 67)% при небольшом диапазоне регулировки частоты вращения;
- центральное расположение кабельных секций создает гидравлическое сопротивление буровому раствору и препятствует перемещению аварийного инструмента внутри буровой колонны;
- аппаратура скважинной телеметрической системы недостаточно эффективна;
- отсутствуют средства управления для решения современных и перспективных задач подземной навигации.
Известно устройство [RU №2040691, МПК Е21В 47/12, опубл. 25.07.1995 г.] для бурения скважин, а именно к устройство для бесконтактной передачи энергии от источника, находящегося в одной трубе из колонны труб, к потребителю, находящемуся в другой трубе этой колонны. Сущность изобретения: система передачи информации, электрической энергии содержит электрические проводники, расположенные вдоль тела труб, и элементы бесконтактной связи на ниппеле и муфте. Эти элементы выполнены в виде трансформаторных обмоток, размещенных в кольцевых проточках стыкуемых труб. Кольцевые проточки выполняются или на торце муфты и на упорной плоскости ниппеля, или в конических резьбовых поверхностях ниппеля и муфты, или на торце ниппеля и противолежащей ему плоскости муфты, или в наружных цилиндрических поверхностях ниппеля и муфты, или во внутренних поверхностях ниппеля и муфты. Трансформаторные обмотки могут быть размещены внутри собственных разомкнутых магнитопроводов, при этом трубы могут быть выполнены из немагнитного материала. Трансформаторные обмотки могут быть намотаны вокруг собственных замкнутых кольцевых магнитопроводов, установленных в кольцевых проточках, при этом трубы могут быть выполнены из немагнитнорго электропроводного материала. Достоинством изобретения является наличие высокоскоростного канала связи с поверхностью, позволяющего оснастить забойную часть компоновки всей необходимой аппаратурой (навигационной и геофизической) для обеспечения эффективной проводки скважин. Недостатком - сложность и высокая стоимость встроенной в трубы проводной линии связи, используемой только для информационного обмена.
Известен способ и система для направленного бурения скважин [US 2017306702, МПК Е21В 44/04; Е21В 44/06; опубл. 26.10.2017 г.]. Способ заключается в выборе проектного начального и конечного пространственного положения участка ствола скважины, на котором рассчитывается технологический регламент бурения, в частности, чередование роторного бурения и так называемого «слайд бурения», т.е. бурения с помощью ориентируемой забойной компоновки. Рассчитанный участок траектории включает в себя прогнозируемую реакцию при бурении и учет этой реакции при выборе режимов проходки. Далее осуществляют бурение этого участка скважины. Траектория и режимы бурения корректируются, при необходимости, исходя из результатов промежуточных замеров. Достоинством предлагаемого технического решения, прежде всего, является оптимизация процесса проводки скважин по заданной траектории на основе априорного моделирования процесса с учетом ограничений, оперативной корректировки текущей траектории при возникновении возмущающих факторов, неучтенных при моделировании, путем изменения параметров управляющих воздействий и режимов бурения (вплоть до замены компоновки), широкие возможности для автоматизации процесса. К достоинствам данного решения следует также отнести учет такого весьма важного фактора при бурении скважин, как состав и структура геологической формации. Предлагается идентифицировать эту формацию на основе априорных данных соседних скважин и по косвенным параметрам, связанным с изменениями режимов бурения. Однако такую идентификацию следует признать недостаточно достоверной, т.к. соседние скважины могут отстоять на значительном расстоянии, а косвенные параметры дают только грубые оценки.
Известна система управления и способ при бурении в различных неоднородных пластах [WO 2017132098, МКИ Е21В 41/00, 44/00, опубл. 03.08.2017 г.]. Система использует метод электромагнитного каротажа, основанный на магнитотеллурическом метод изучения строения массивов горных пород. Магнитотеллурические методы изучения строения массивов горных пород основаны на применении вариаций естественного переменного электромагнитного поля Земли [Жамалетдинов, А.А. Магнитотеллурический метод изучения строения массивов горных пород. Учебное пособие. - 2014. - 103 стр.]. Отличительной особенностью магнитотеллурических методов является отсутствие необходимости в применении генераторных устройств для возбуждения электромагнитного поля в земле. Магнитотеллурические методы известны с 1912 года, когда французский геофизик Конрад Шлюмберже предложил использовать вариации естественного переменного электромагнитного поля Земли для горно-геологических целей. Система определяет расстояние от КНБК до неоднородностей геологических формаций для управления траекторией направленного бурения и изучения строения пород. Недостаток
системы - специфичность и ограниченность критериев управления, т.к. существует множество факторов, учет которых необходим во взаимосвязи при проводке скважины.
Сложившаяся практика проектирования системы разработки нефтегазовых месторождений характеризуется определенными реальными свойствами:
- отсутствие достаточной статистической информации;
- наличие неоднозначной статистической совокупности фонда скважин в следствии того, что свойства неоднородного продуктивного пласта не полностью детерминированы;
- сложность системы добычи углеводородов с большим числом элементов и связей, а также из-за динамичности системы.
Эти факторы обуславливают необходимость увязки проектных решений непосредственно на производстве [URL: Современные принципы проектирования разработки нефтяных,газовых и газоконденсатных месторождений/ февраль 2017 г. (www.geologam.ru/oil/planning)].
.Задачей изобретения является создание способа управления бурением скважин с автоматизированной системой оперативного управления бурением скважин, в том числе со сложным геологическим строением, при освоении месторождений на основе электробурения.
Техническим результатом изобретения является повышение эффективности процесса освоения и эксплуатации месторождений за счет сокращения времени освоения, оптимизации схем разработки, повышения качества вскрытия продуктивных пластов.
Поставленная задача решается способом управления бурением скважин, в том числе при разработке месторождений со сложным геологическим строением, заключающийся в том, что первоначально, опираясь на априорные данные, бурят хотя бы одну скважину в характерном месте объекта разработки. Траекторию бурения и параметры бурения выбирают непосредственно в процессе проходки скважины при заданных ограничениях, а бурение осуществляют до достижения продуктивного коллектора при обеспечении критерия максимальной нефтеотдачи в области коллектора, прилегающей к скважине. В процессе проходки скважины производят полную достоверную идентификацию параметров объекта разработки и окружающих горно-геологических пород. На основании полученных результатов формируют хотя бы одну субоптимальную модель разработки объекта, с учетом которой осуществляют бурение других скважин также с достижением критерия максимальной нефтеотдачи и осуществлением мониторинга горногеологической среды, прилегающей к скважине. По результатам этого мониторинга оперативно корректируют субоптимальную модель разработки объекта, и данный итеративный процесс продолжают до достижения оптимальной модели разработки объекта и месторождения в целом по критерию максимума нефтеотдачи при минимуме затрат ресурсов и времени.
Согласно изобретению априорные данные на начало бурения имеют рекомендательный характер.
Согласно изобретению критерий нефтеотдачи носит комплексный характер и включает в себя параметры производительности скважины и извлекаемости углеводородов.
Согласно изобретению ограничения параметров траектории и бурения носят многоаспектный и переменный характер и включают, в том числе, геологические локации, минимизацию затрат и ресурсов при освоении скважины, критерии технико-экономических показателей бурения, аспекты безопасной и безаварийной работы.
Согласно изобретению управление бурением осуществляют в автоматизированном и/или автоматическом режиме с использованием принципов интеллектуального управления.
Согласно изобретению скважину, в основном, бурят за один рейс с полным информационным обеспечением для дальнейших работ.
Согласно изобретению идентификацию параметров объекта разработки выполняют по инклинометрическим, геофизическим и технологическим измерениям в режиме реального времени.
Поставленная задача решается автоматизированной системой оперативного управления бурением скважин, включающая в себя буровые трубы со встроенными кабельными секциями, единую компоновку низа буровой колонны, состоящую из двигателя вентильного электрического бурового привода, под нижним основанием которого размещены блок наддолотный, примыкающий к буровому долоту, блок отклонителя регулируемого, блок электропитания, блок телеметрии и управления. К верхней головной части двигателя вентильного электрического бурового привода подключена силовая кабельная линия, сформированная в буровых трубах до устья скважины. Над двигателем вентильным электрического бурового привода размещены блок инклинометрический и блок геофизический. Вход/выход блока наддолотного подключен к первому входу/выходу блока телеметрии и управления, второй вход/выход которого соединен с первым входом/выходом блока отклонителя регулируемого, второй вход которого подключен к первому выходу блока электрического питания, вход которого подключен к выходу двигателя вентильного электрического бурового, вход которого соединен с первым входом/выходом силовой кабельной линии связи, и через первую транзитную линию соединен с третьим входом/выходом блока телеметрии и управления, четвертый вход которого подключен к второму выходу блока электрического питания, а пятый вход/выход через вторую транзитную линию соединен с первым входом/выходом блока инклинометрического, который вторым входом/выходом подключен к блоку геофизическому. Второй вход/выход силовой кабельной линии на устье скважины подключен к первому выходу наземной станции управления приводом и к первому входу/выходу наземной подсистемы управления бурением, второй вход/выход которой подключен ко второму входу/выходу наземной станции управления приводом, третий его вход/выход подключен к субъекту управления, а его четвертый вход/выход предназначен для подключения к подсистеме информационной поддержки разработки.
Согласно изобретению наземная подсистема управления бурением имеет связь с интегрирующими средствами подсистемы информационной поддержки разработки.
Согласно изобретению блок телеметрии и управления связан с наземной подсистемой управления бурением высокоскоростным и двухсторонним каналом связи забой - поверхность, использующим в качестве среды распространения сигналов силовую кабельную линию.
Согласно изобретению инклинометрические датчики размещены в двух местах - в блоке наддолотном под двигателем вентильным электрическим бурового электропривода и над этим двигателем в блоке инклинометрическом для повышения оперативности и достоверности измерений.
Согласно изобретению регулируемый отклонитель выполнен по роторной управляющей схеме или только с регулируемым углом перекоса.
Согласно изобретению геофизическая аппаратура размещена в блоке наддолотном и в блоке геофизическом для оптимизации геофизических измерений, причем состав геофизической аппаратуры, ее характеристики и размещение обуславливаются решением навигационных и дополнительных задач, сформированных в начале бурения.
Согласно изобретению датчики технологических параметров размещены в блоке наддолотном и в наземных устройствах.
Согласно изобретению наземная подсистема управления бурением является интеллектуальной системой управления.
Согласно изобретению блок телеметрии и управления выполнен на базе программируемой логики и реализует функцию адаптивного бурового регулятора с возможностью оперативной настройки.
Согласно изобретению субъектом управления (лица принимающего решение) являются и/или технолог, геолог, буровой мастер и другие уполномоченные лица.
Согласно изобретению статор двигателя вентильного электрического бурового электропривода имеет дополнительные обмотки для питания скважинной аппаратуры и электроприводов исполнительных механизмов в составе компоновки низа буровой колонны.
Согласно изобретению транзитные линии в составе компоновки низа буровой колонны проложены через статор двигателя вентильного электрического бурового привода.
Согласно изобретению в состав наземной подсистемы управления бурением включены наземные средства измерения, вычислитель управляющего воздействия, наземные исполнительные механизмы, формирователи динамических моделей бурового инструмента и призабойной среды, идентификатор, формирователь цели управления, решатель, база знаний, база данных, вычислитель управляющих воздействий, модуль самооценки, интерфейс взаимодействия с подсистемой информационной поддержки разработки.
Технический результат изобретения достигается благодаря следующему. На этапе проектирования, опираясь на техническое задание и технико-экономическое обоснование, создается концептуальная схема разработки месторождения. На основании этой схемы в составе месторождения выделяются определенные объекты, в свою очередь они делится на зоны по прогнозу схожести физико-геологических свойств. Опираясь на эвристические подходы, выбирается первоначальная зона (зоны), в которой осуществляется бурение. Основные цели бурения - обеспечение приемлемой производительности скважины и разведка объекта. На основании данных разведки формируется предварительная геолого-физическая модель объекта, которая учитывается при формировании субоптимальных моделей (близких к оптимальным и принятых на основе определенных допущений и неточностей) разработки. Существует около двухсот технологий разработки [Бердин Т.Г. Проектирование разработки нефтегазовых месторождений системами горизонтальных скважин. - М. ООО «Недра - Бизнесцентр», 2001 -199 с] с использованием различных схем расположения скважин, имеющих различные траектории - вертикальные, наклонно-направленные, горизонтальные. Каждое последующее бурение имеет целью достижение максимального критерия нефтеотдачи и осуществляется в контексте полученной модели и, одновременно, корректирует модель объекта разработки и технологический регламент. Такой подход к бурению и способ управления им позволяет эффективно, в итеративном режиме сформировать и осуществить проект освоения месторождения. В конечном итоге, при получении достаточно полной информации по месторождению, формируется и уточняется геолого-физическая модель месторождения, на основании которой осуществляется его оптимальная разработка.
Обеспечение приемлемой производительности скважины достигается выбором траектории бурения и технологическим процессом проходки, обеспечивающим достижение оптимального критерия нефтеотдачи с учетом заданных ограничений (экономических, траекторных, технологических и др.) на основе достаточного объема поступающей в реальном масштабе времени измерительной информации навигационного, геофизического и технологического характера. Указанный критерий нефтеотдачи включает в себя параметры производительности (продуктивности) скважины и извлекаемости углеводородов.
Известно, что продуктивность нефтяной скважины q зависит от целого ряда факторов [URL:http://vseonefti/ru]:
q=αkh(Рпл.-Рзаб.)/μВ(lnr0/rw)+S, где
(Рпл.-Рзаб) - разность пластового и забойного давления, α - масштабный коэффициент, k - проницаемость пласта, h - мощность пласта, μ - вязкость флюида, В - коэффициент расширения по объему, r0 - радиус контура питания, rw - радиус скважины, S - скин-фактор (фильтрационное сопротивление течению флюида).
Также известно, что нефтеотдача характеризуется коэффициентом извлечения нефти - КИН. КИН зависит от многочисленных факторов и варьируется от 0,09 до 0,75 [URL:http:neftegaz.ru/tecch_library]. Можно считать, что для целого ряда случаев, КИН=f(μ*,k, Тпл., Тпес., h, Sнеф., Sсет.) и может иметь вид регрессионного уравнения [Назарова Л.Н. Обоснование коэффициента извлечение нефти в зависимости от комплекса геолого-физических параметров пластов и насыщающих их флюидов «РГУ нефти и газа имени И.М. Губкина» - Разработка и эксплуатация нефтяных и газовых месторождений диссертация на соискание ученой степени доктора технических наук. М., 2015 г] Здесь в формуле КИН:
μ* - отношение вязкости нефти к вязкости воды, Тпл. - пластовая температура, Тпес.-коэффициент песчанистости, Sнеф. - нефтенасыщенность, Sсет.- плотность сетки скважин.
Исходя из вышеизложенных соотношений, например, определяется критерий нефтеотдачи:
(Σqi•Ti/Cli+ΣKИНj•Vj/C2j)→max; при ΣTi=Т,
где, Т - время эксплуатации объекта, Ti - характерный интервал эксплуатации, Cli - интегральная оценка затрат на обеспечение производительности скважины на интервале эксплуатации; C2j - интегральная оценка затрат на обеспечение коэффициента извлечения нефти из скважины на интервале эксплуатации; Vj - оценка объема запасов углеводородов на интервале эксплуатации.
Достижение максимального значения данного критерия для скважинного куста, например, создаст предпосылки для минимизации затрат и ресурсов при освоении и эксплуатации объекта. Кроме того, при проводке скважин важны также уровни технико-экономических показателей бурения, аспекты безопасной и безаварийной работы, в частности, важно прогнозирование геологических локаций, способных создать осложнения при бурении.
Повышение эффективности процесса освоения и эксплуатации месторождений обеспечивается за счет сокращения времени проведения проектных работ и повышения их качества, так как за этапом инициации проекта освоения месторождения сразу следует этап итеративного проектирования, совмещенный с этапом его исполнения, что позволяет выбрать, на основании оптимальной модели разработки, продуктивную стратегию добычи на весь ее период, существенно сократить вероятность бурения «пустых» скважин, сократить затраты на освоение месторождений, снизить риски аварийности.
Реализация предлагаемого изобретения является сложной технической задачей, однако современный уровень научно-технического прогресса позволяет решить поставленные задачи. При этом предложенный способ и система управления бурением должна обладать характерными особенностями:
- применение методов и алгоритмов интеллектуального управления;
- возможность оперативного изменения управляющих воздействий в широком диапазоне, в том числе, регулировка параметров отклоняющего режима КНБК, регулировка оборотов долота и буровой колонны, осевых нагрузок, режимов промывки забоя;
- широкий набор средств измерений (скважинных и наземных), обеспечивающих достаточно полную идентификацию траектории бурения, параметров техпроцесса и характера окружающей среды;
- надежный высокоскоростной двухсторонний канал связи скважина-поверхность для обеспечения оперативного принятия решений по управлению.
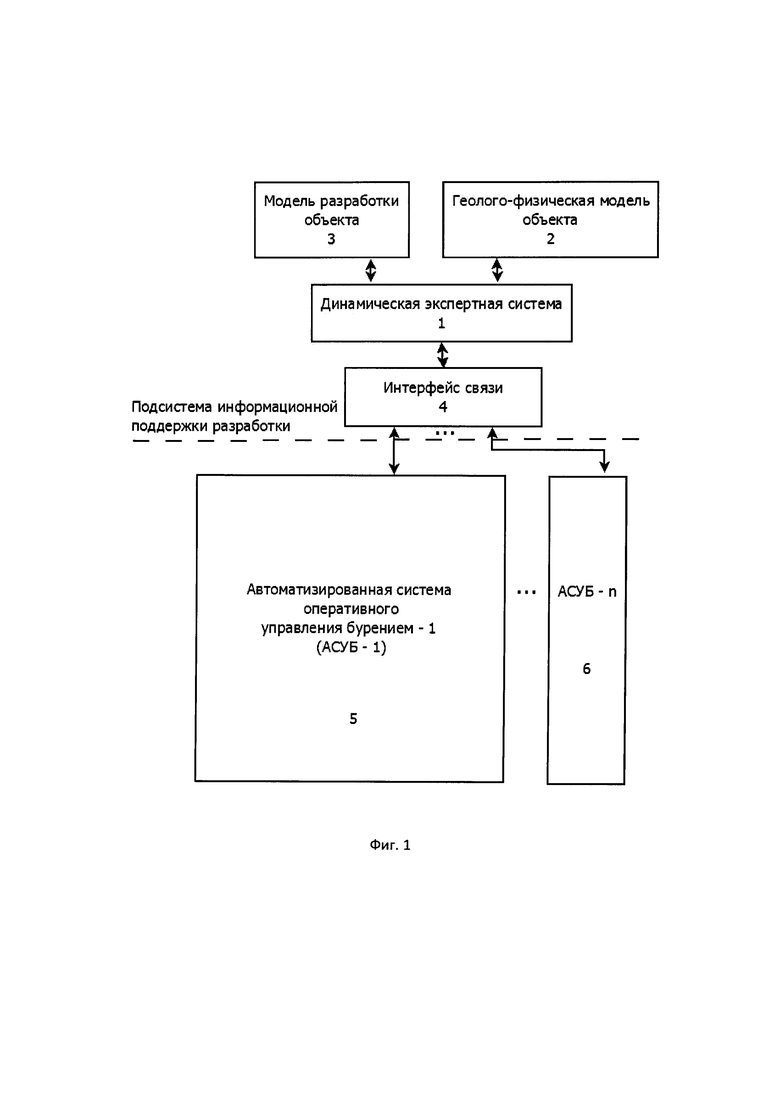
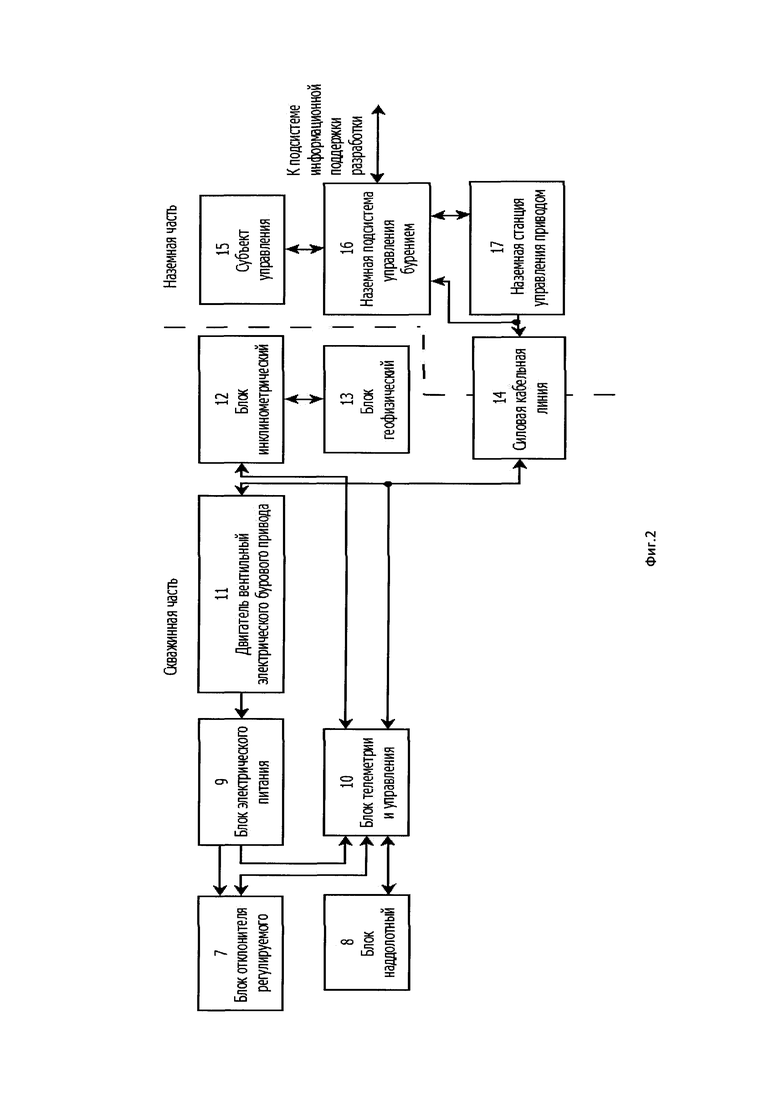
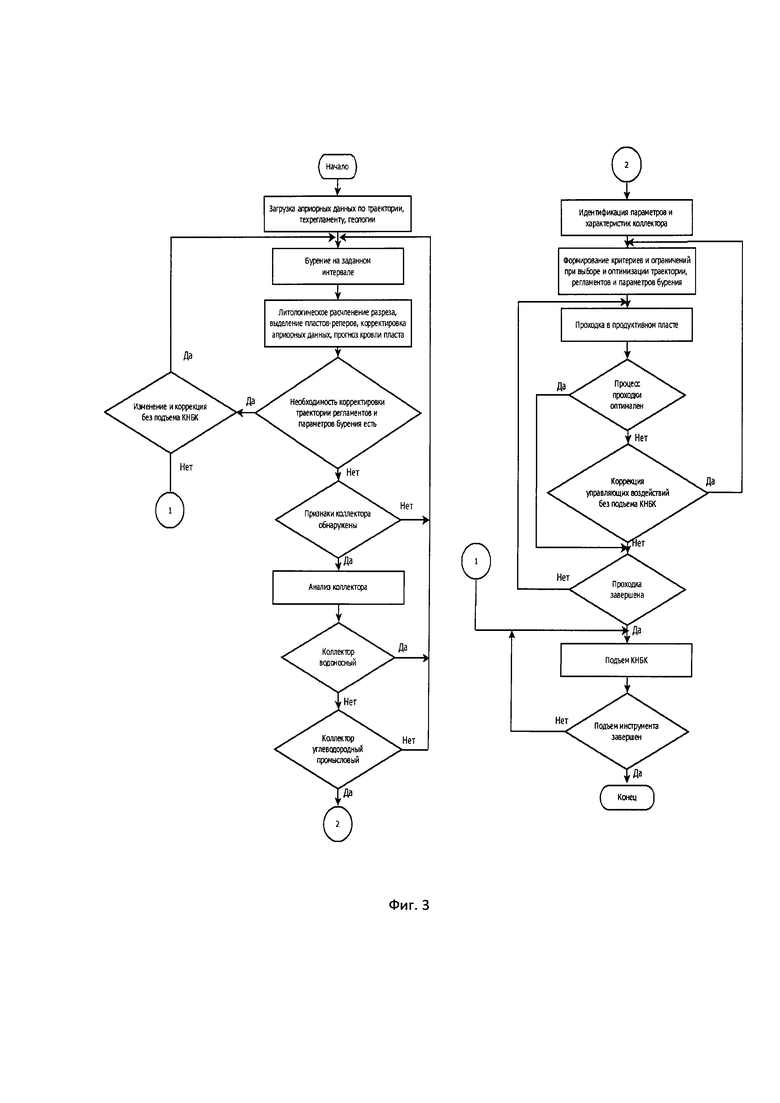
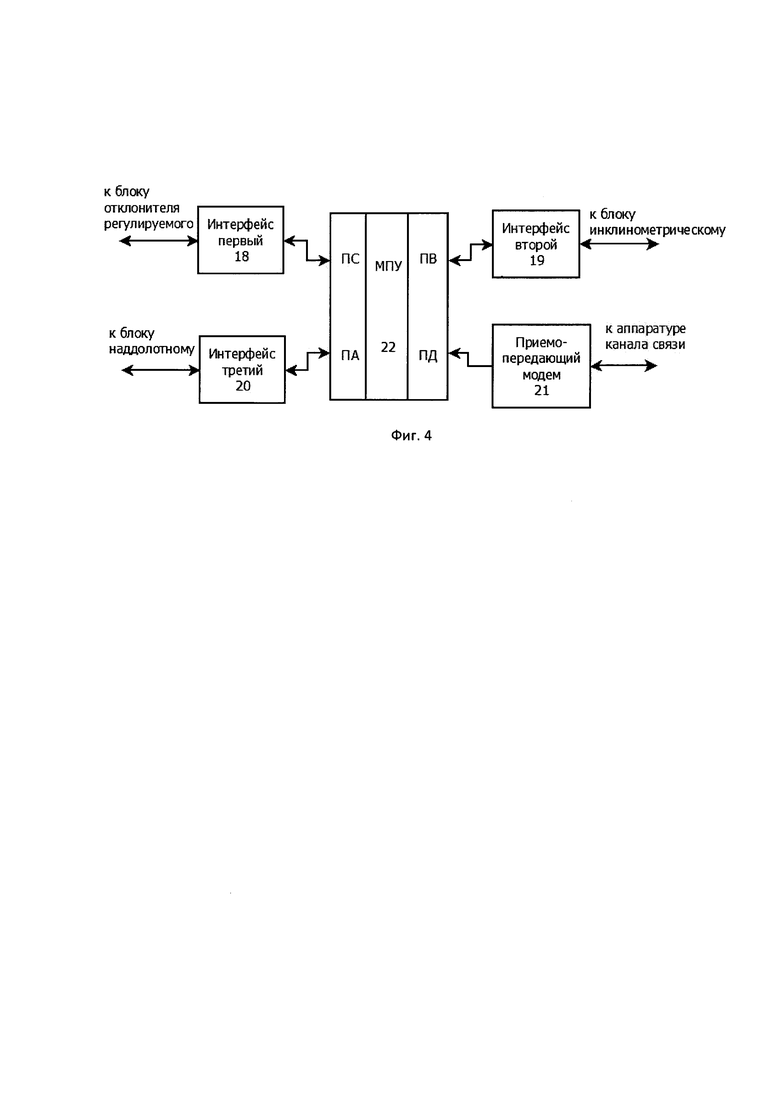
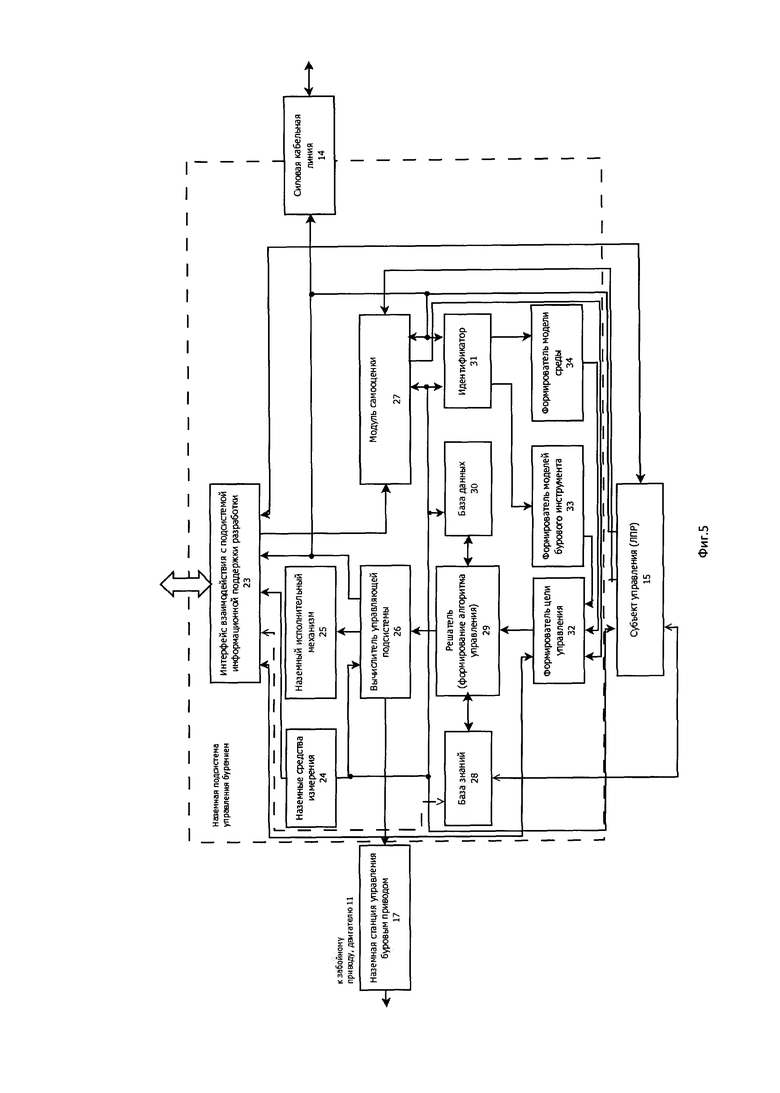
Сущность изобретения поясняется чертежами, где на фиг. 1 приведена структурная схема системы управления разработкой объекта нефтегазового месторождения, на фиг. 2 - автоматизированной системы оперативного управления бурением (АСУБ), на фиг. 3 - алгоритм управления бурением скважины, на фиг. 4 - структурная схема блока телеметрии и управления, на фиг. 5 - структурная схема наземной подсистемы управления бурением.
На фиг. 1 обозначены: 1 - динамическая экспертная система (ДЭС), 2 - геолого-физическая модель объекта/месторождения, 3 - модель разработки объекта, 4 - интерфейс связи, 5 - АСУБ-1, 6 - АСУБ-n.
На фиг. 2 обозначены: 7 - блок отклонителя регулируемого, 8 - блок наддолотный, 9 - блок электрического питания, 10 - блок телеметрии и управления, 11 - двигатель вентильный электрического бурового привода, 12 - блок инклинометрический, 13 - блок геофизический, 14 - силовая кабельная линия, 15 - субъект управления, 16 - наземная подсистема управления бурением и 17 - наземная станция управления приводом.
На фиг. 4 обозначены: 18 - интерфейс первый, 19 - интерфейс второй, 20 -интерфейс третий, 21 - приемо-передающий модем, 22 - микропроцессорное устройство (МПУ).
На фиг. 5 обозначены: 23 - интерфейс взаимодействия со средствами информационной поддержки, 24 - наземные средства измерения, 25 - наземные исполнительные механизмы, 26 - вычислитель управляющего воздействия, 27 - модуль самооценки, 28 - база знаний, 29 - решатель, 30 - базы данных, 31 - идентификатор, 32 - формирователь цели управления, 33 - формирователь динамических моделей бурового инструмента, 34 - формирователь модели среды.
Система управления разработкой объекта нефтегазового месторождения (фиг. 1), включает в себя подсистему информационной поддержки разработки (в дальнейшем - подсистема поддержки) и совокупность автоматизированных систем оперативного управления бурением. Основной компонент подсистемы поддержки - динамическая экспертная система (ДЭС) 1, которая формирует и корректирует геолого-физическую модель объекта/месторождения 2 и модель разработки 3. Взаимодействие ДЭС 1 с АСУБ осуществляет интерфейс связи 4, способный, в том числе, обеспечить удаленный доступ. Использование ДЭС 1 обусловлено рядом специфических преимуществ, в том числе:
- возможностью в полной мере использовать передовой опыт специалистов отрасли;
- моделированием механизма мышления человека, способностью не только сформировать определенные соображения и выводы, основываясь на базе знаний, но объяснить и доказать их обоснованность;
- высокой оперативностью и достоверностью получения результатов;
- способностью эффективного решения задач, связанных с планированием, прогнозированием, диагностикой, контролем и управлением сложных производственных систем.
Геолого-физическая модель объекта 2 включает в себя:
- геолого-физическое строение залежей;
- физико-химические свойства коллекторов и флюидов;
- детерминированные математические модели процессов в пластах, как наиболее корректные [Бердин Т.Г. Проектирование разработки нефтегазовых месторождений системами горизонтальных скважин. - М. ООО «Недра - Бизнесцентр», 2001].
ДЭС 1 формирует и корректирует в модели разработки объекта 3 прежде всего:
- способы воздействия на пласт;
- систему размещения, плотность и профили скважин;
- темп и порядок разбуривания;
- способ эксплуатации скважин.
Непосредственное управление бурением осуществляет АСУБ. Основные функции АСУБ заключаются в оптимальном управлении процессом бурения и в информационном мониторинге горных пород, прилегающих к стволу и забою скважины. Важнейшие задачи, решаемые при управлении:
- выбор траектории бурения в зависимости от заданной целевой функции с учетом текущих ограничений, в том числе, включая результаты информационного мониторинга, при этом изменение траектории, при необходимости, происходит оперативно;
- обеспечение технологических режимов и регламентов, позволяющих минимизировать затраты на осуществление процесса;
- предупреждение аварийных ситуаций и исключение нежелательных прецедентов;
- заключение по пористости породы и литологическому расчленению разреза;
- заключение по характеру насыщения коллектора на исследуемом участке;
- оценка физических свойств горных пород и скважинного флюида;
- заключение о геометрии пород и скважины.
Взаимодействие АСУБ и подсистемы поддержки обусловлено дифференциацией их функций. Подсистема поддержки интегрирует значительный объем информации по всем АСУБ и способна с одной стороны обеспечить оптимальное освоение объекта, а с другой - способствовать значительному снижению априорной неопределенности при управлении бурением отдельной скважины и принятию оптимальных решений на любом текущем участке бурения, автоматизации процесса управления.
АСУБ (фиг. 2) функционирует следующим образом. Блок отклонителя регулируемого 7 является исполнительным устройством и призван обеспечить направленное бурение с заданной интенсивностью искривления.
Блок наддолотный 8 размещается непосредственно за буровым долотом и контролирует инклинометрические, технологические, геофизические параметры.
Блок электрического питания 9 преобразует электроэнергию, отбираемую от статорной обмотки двигателя вентильного электрического бурового привода 11, для электропитания скважинной аппаратуры через блок 10 и электроприводов в блоке 7.
Функции управления и контроля скважинной части системы обеспечивает блок телеметрии и управления 10. По своему предназначению блок 10 выполняет функции:
- адаптивного бурового регулятора, параметры которого формирует наземная подсистема управления бурением, используя канал связи скважина-поверхность;
- интегратора различной скважинной измерительной информации;
- источника дистанционного электропитания для скважинной аппаратуры.
Двигатель вентильный электрического бурового привода 11 обеспечивает вращение бурового долота. Он питается и управляется с поверхности наземной станцией управления приводом 17 по силовой кабельной линии 14 встроенной в буровые трубы. Выбор данного типа двигателя обусловлен целым рядом его известных преимуществ.
Блок инклинометрический 12 обеспечивает точный контроль угловых параметров траектории скважины - азимута и зенитного угла, а также визирного угла.
Состав блока геофизического 13 может быть различным, в зависимости от решение задач идентификации окружающей среды [Беляков Н.В. Интегрированные геофизические исследования бурящихся скважин. - М.:Из-во «Физматкнига», 2008]. Так, например, модуль спектрального гамма каротажа позволяет сделать заключение по характеру насыщения коллектора на исследуемом участке; модуль электромагнитного каротажа - по характеру насыщения коллектора на участке скважины; модуль нейтронного каротажа - по пористости породы и литологическому расчленению разреза (совместно с лито-плотностным каротажом); модуль лито-плотностного каротажа - заключение по пористости породы и литологическое расчленение разреза (совместно с нейтронным каротажом); модуль акустического каротажа - о геометрических параметрах скважины, свойствах горных пород; модуль виброметрии осуществляет оценку твердости горных пород.
Наземная подсистема управления 16 обеспечивает:
- прием, обработку, хранение и визуализацию измерительной информации;
- мониторинг работы всего оборудования;
- выработку и осуществление управляющих воздействий;
- сбор, предварительная обработка информации о параметрах объекта разработки, обоснование и реализация траектории и режимов бурение и передача массивов информации в подсистему поддержки.
- взаимодействие с субъектом управления и подсистемой поддержки.
Наземная станция управления приводом 17 работает под управлением подсистемы 16 и формирует электрическую питающую систему скважинного двигателя вентильного электробурового привода. Параметры питающей системы определяют режим работы двигателя.
В качестве субъекта управления (лица принимающего решение) 15 выступают и/или технолог, геолог, буровой мастер и другие уполномоченные лица.
Одним из важнейших элементов системы является канал связи скважина-поверхность. В предлагаемом изобретении в качестве среды передачи сигналов используется силовая цепь питания приводного электродвигателя 11 - силовая кабельная линия 14, что позволяет реализовать надежный высокоскоростной канал связи с пропускной способностью в десятки и сотни килобит в секунду и создать предпосылки для решения, задач поставленных перед системой управления.
Алгоритм функционирования АСУБ и необходимые ограничения предварительно задаются подсистемой поддержки. В процессе работы этот алгоритм и ограничения оперативно изменяются в функции собственной измерительной информации и корректив этой подсистемы.
Измерительная информация по своему характеру делится на инклинометрическую, технологическую и геофизическую. По месту регистрации на скважинную и наземную. В блоке 7 скважинной части, например, размещают все группы датчиков - инклинометрические (зенитный и визирные углы, азимут), технологические (давления раствора, оборотов и нагрузки долота), геофизические (естественной интегральной гамма-активности пород, кажущегося электросопротивления пород). Преимуществом таких измерений является их максимальная оперативность, т.к. блок 7 расположен максимально близко к забою, недостатком - большая сложность конструктивной компоновки аппаратуры (значительные ограничения по габаритам) и значительные механические воздействия. В силу этих ограничений аппаратура блока 7 должна быть максимально простой (уровень индикаторов) и требует дополнительного контроля точности и достоверности. Эту задачу решают, для инклинометрических данных - блок 12, для технологических - наземные датчики, для геофизических - блок 13, который также существенно дополняет набор этих данных, расширяя информативность процедуры формирования геолого-физической модели среды.
Вся аппаратура скважинной части управляется блоком 10, который, в свою очередь, получает необходимые инструкции от подсистемы 16 через канал связи забой-поверхность. Блок 10 настраивает режимы измерений и передачи данных в блоках 7, 8, 12, 13, собирает и обрабатывает измерительную информацию, формирует и передает телеметрические кадры на поверхность через блок телеметрии и управления 10. Также блок 10 формирует управляющие команды для блока 7 и контролирует выполнение этих команд в соответствии с заданными алгоритмом и уставками, осуществляя направленное бурение.
Важной особенностью АСУБ является возможность эффективного управления таким сложным процессом, как бурение на депрессии, при котором очистка забоя осуществляется субстанцией с малым удельным весом (воздух, эмульсии и другие), поскольку нет необходимости, например, в передаче мощности забойному гидравлическому двигателю потоком бурового раствора. Такое бурение весьма актуально в условиях низких пластовых давлений в объектах разработки и других случаях.
Способ управление бурением скважин осуществляют в соответствии, например, с блок-схемой алгоритма (фиг. 3). Особенностями предлагаемого процесса являются:
1. Оперативная непрерывная адекватная идентификация параметров техпроцесса и пространства, окружающего скважину.
2. Оптимизация процесса проходки, исходя из конкретных условий и заданных текущих критериев, как альтернатива выполнения жестких проектных директив, задаваемых в соответствии со сложившейся практикой.
3. Проходка скважины, в основном, за один рейс.
Рассмотрим отдельные аспекты представленного алгоритма. На начальных участках бурения, предшествующих входу в продуктивный пласт, основным критерием эффективности является максимальная скорость бурения при минимуме затрат ресурсов и исключении нежелательных прецедентов (опасное сближение с другими скважинами, разбуривание включений с повышенной твердостью и др.). При достижении продуктивной зоны задача оптимизации усложняется, т.к. помимо достижения определенной скорости бурения, при идентификации параметров и характеристик коллектора необходимо выбрать траекторию и режим бурения в соответствии с критерием нефтеотдачи во взаимодействии с подсистемой поддержки. То есть, например, если априорно мощность продуктивного пласта оценивалась на уровне 10 м…15 м и предполагалась проходка по пласту горизонтальным стволом, а из-за латеральной неоднородности реально определена мощность пласта порядка 50 м, соответственно, траектория и режимы бурения должны обеспечить проходку наклонно-направленным стволом (исходя из имеющегося практического опыта).
Реализация подсистем, блоков, устройств согласно фиг. 1,2 возможна на практике. Так построение ДЭС 1 известно, например [Джексон П. Введение в экспертные системы. - М.: Изд. дом "Вильямс", 2006. Уотермен Д. Руководство по экспертным системам / Д. Уотермен. - М.: Мир, 2006]. Основные элементы ДЭС: база данных, где представлены все данные по месторождению и техпроцессу; база знаний - представлены знания в предметной области и правила управления ими, в том числе матемаматической моделью вытеснения флюида и расчеты технологических показателей разработки, экономико-математические модели; механизм логического вывода и пользовательский интерфейс обеспечивает правильное взаимодействие с экспертом (технологом, оператором бурения, геологом и др.); другие устройства, обеспечивающие функционирование.
Вариант реализации блока телеметрии и управления представлен на фиг. 4. Сбор измерительной информации через первый - 18 и второй интерфейс - 19, выдачу команд управления через интерфейс третий - 20, а также взаимодействие с наземной аппаратурой через приемо-передающий модем - 21 осуществляет микропроцессорное устройство (МПУ) - 22 через свои информационные порты (ПА…ПD). По своему назначению этот блок выполняет функции адаптивного бурового регулятора, параметры которого формирует наземная подсистема управления бурением 16, используя канал связи скважина-поверхность.
С учетом сложности предложенного технического решения, задачи управления целесообразно решать, используя современные методы и алгоритмы интеллектуальных систем. Согласно известным положениям [Всероссийское совещание по проблемам управления ВСПУ-2014, Москва 16.06-19.06.2014 г.], реализация наземной подсистемы управления бурением 16 возможна в соответствии со структурной схемой (фиг. 5). Здесь присутствуют различные функциональные модули. Наземные средства измерения 24 объединяют все измерительные устройства, служащие для получения информации из наземных технических средств. Скважинная измерительная информация поступает по каналу связи скважина-поверхность по силовой кабельной линии 14. Вычислитель управляющего воздействия 26 осуществляет вычисление величины управляющего воздействия на основе закона управления и данных измерительной системы. Наземные исполнительные механизмы 25 предназначены для осуществления воздействия на технические средства. Формирователи динамических моделей бурового инструмента 33 и среды 34 осуществляют свои функции на основе данных измерений, интерпретированных идентификатором 31. Формирователь цели управления 32 исходит из характера выше перечисленных моделей. Синтез закона управления осуществляет решатель 39, использующий в качестве исходных данных цели управления, правила из базы знаний 28 и информационные массивы из базы данных 30. Вычислитель управляющих воздействий 26 на основании закона управления распределяет управляющие воздействия между наземными и скважинными техническими средствами. Модуль самооценки 27 осуществляет вычисление количественного эквивалента качественной самооценки поведения интеллектуальной системы автоматического управления.
Самооценка вычисляется на основе соответствия данных измерений собственным целям интеллектуальной системы управления. В качестве таких собственных целей могут быть, например, соответствие результирующего достижения буровым инструментом области подземного пространства, обладающей оптимальными свойствами при минимуме затрат ресурсов и времени. Модуль самооценки воспринимает качественные оценки, поступающие от субъекта управления, подсистемы поддержки. При получении негативных оценок ухудшается самооценка подсистемы управления и активизируется модуль формирования цели управления, ужесточающий требования к качеству процесса управления.
Интерфейс 23 осуществляет информационное взаимодействие со средствами информационной поддержки в режиме удаленного доступа.
Возможность построения канала связи забой-поверхность с заявленными характеристиками подтверждается опытом построения подобных телеметрических каналов связи в электроэнергетике [URL: ВЧ - связь по ЛЭП (PLC) masters.donntu/org].
Реализация отклонителя 7 известна, она может быть выполнена в виде сложной системы [US 9464482 В1 МКИ Е21В 44/00, опубл. 11.10.2016 г.] или более простого варианта [Хайн Н. Геология, разведка, бурение и добыча нефти./Пер с англ. - М.: ЗАО «Олимп - Бизнес», 2004].
Блок наддолотный 8, размещаемый непосредственно за буровым долотом, может быть выполнен по варианту реализации [URL:http://www.vniigis-ztk.ru].
Способ питания и управления двигателем вентильным электробурового привода 11, обеспечивающим вращение бурового долота, известен, например [URL: http://www.novomet.ru].
Известно исполнение блоков инклинометрического 12 [Ковшов Г.Н., Алимбеков Р.И., Жибер А.В. Инклинометры. (Основы теории и проектирование). Уфа: Гилем, 1998] и геофизического 17 [Беляков Н.В. Интегрированные геофизические исследования бурящихся скважин. - М.: Из-во «Физматкнига», 2008].
Таким образом, предлагаемые способ управления бурением скважин, в том числе при разработке месторождений со сложным геологическим строением, и автоматизированная система, его реализующая позволяют повысить эффективность освоения нефтегазовых месторождений за счет:
 сокращения времени проведения проектных работ и повышения их качества;
сокращения времени проведения проектных работ и повышения их качества;
- выбора на основании оптимальной модели разработки продуктивной стратегии добычи на весь ее период;
- существенного сокращения вероятности бурения «пустых» скважин;
- сокращения затрат на освоение месторождений;
- снижения рисков аварийности;
- осуществления бурения на депрессии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ СКВАЖИН | 2023 |
|
RU2808359C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПЛАСТОВ В ПРОЦЕССЕ БУРЕНИЯ НЕФТЕГАЗОВЫХ СКВАЖИН И ОПРОБОВАТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492323C1 |
| СПОСОБ И КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ БУРЕНИЕМ СКВАЖИН | 2019 |
|
RU2723805C1 |
| СПОСОБ ОПЕРЕЖАЮЩЕГО БУРЕНИЯ ПИЛОТНЫХ СТВОЛОВ ПРИ СТРОИТЕЛЬСТВЕ СКВАЖИН НА ШЕЛЬФЕ | 2023 |
|
RU2818392C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ | 2001 |
|
RU2208153C2 |
| МОДЕЛИРОВАНИЕ ПЕРЕХОДНОГО РЕЖИМА КНБК/БУРИЛЬНОЙ КОЛОННЫ В ПРОЦЕССЕ БУРЕНИЯ | 2008 |
|
RU2461707C2 |
| СИСТЕМА И СПОСОБ ВЫПОЛНЕНИЯ БУРОВЫХ РАБОТ НА НЕФТЯНОМ МЕСТОРОЖДЕНИИ С ИСПОЛЬЗОВАНИЕМ СПОСОБОВ ВИЗУАЛИЗАЦИИ | 2008 |
|
RU2452855C2 |
| СПОСОБ И СИСТЕМА КОМБИНИРОВАННОГО СОПРОВОЖДЕНИЯ ПРОЦЕССА БУРЕНИЯ СКВАЖИНЫ | 2018 |
|
RU2687668C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДОБЫЧЕЙ УГЛЕВОДОРОДНОГО СЫРЬЯ | 2007 |
|
RU2346156C1 |
| СПОСОБ РОТОРНОГО БУРЕНИЯ СКВАЖИН МОДУЛЬНОЙ УПРАВЛЯЕМОЙ СИСТЕМОЙ МАЛОГО ДИАМЕТРА | 2018 |
|
RU2687998C1 |
Группа изобретений относится к области управления разработкой объектов нефтегазовых месторождений, в том числе со сложным геологическим строением, способов управления бурением скважин при освоении месторождений. Техническим результатом является повышение эффективности процесса освоения и эксплуатации месторождений за счет сокращения времени проведения проектных работ и повышения их качества. Способ заключается в том, что первоначально, опираясь на априорные данные, бурят хотя бы одну скважину в характерном месте объекта разработки, причем траекторию бурения и параметры бурения выбирают непосредственно в процессе проходки скважины при заданных ограничениях, а бурение осуществляют до достижения продуктивного коллектора при обеспечении критерия максимальной нефтеотдачи в области коллектора, прилегающей к скважине, причем в процессе проходки скважины производят полную достоверную идентификацию параметров объекта разработки и окружающих горно-геологических пород, на основании результатов которой формируют хотя бы одну субоптимальную модель разработки объекта, с учетом которой осуществляют бурение других скважин также с достижением критерия максимальной нефтеотдачи и осуществлением мониторинга горно-геологической среды, прилегающей к скважине, по результатам которого оперативно корректируют субоптимальную модель разработки объекта, и данный итеративный процесс продолжают до достижения оптимальной модели разработки объекта и месторождения в целом по критерию максимума нефтеотдачи при минимуме затрат ресурсов и времени. 2 н. и 18 з.п. ф-лы, 5 ил.
1. Способ управления бурением скважин, в том числе при разработке месторождений со сложным геологическим строением, заключающийся в том, что первоначально, опираясь на априорные данные, бурят хотя бы одну скважину в характерном месте объекта разработки, причем траекторию бурения и параметры бурения выбирают непосредственно в процессе проходки скважины при заданных ограничениях, а бурение осуществляют до достижения продуктивного коллектора при обеспечении критерия максимальной нефтеотдачи в области коллектора, прилегающей к скважине, причем в процессе проходки скважины производят полную достоверную идентификацию параметров объекта разработки и окружающих горно-геологических пород, на основании результатов которой формируют хотя бы одну субоптимальную модель разработки объекта, с учетом которой осуществляют бурение других скважин также с достижением критерия максимальной нефтеотдачи и осуществлением мониторинга горно-геологической среды, прилегающей к скважине, по результатам которого оперативно корректируют субоптимальную модель разработки объекта, и данный итеративный процесс продолжают до достижения оптимальной модели разработки объекта и месторождения в целом по критерию максимума нефтеотдачи при минимуме затрат ресурсов и времени.
2. Способ по п. 1, отличающийся тем, что априорные данные на начало бурения имеют рекомендательный характер.
3. Способ по п. 1, отличающийся тем, что критерий нефтеотдачи носит комплексный характер и включает в себя параметры производительности скважины и извлекаемости углеводородов.
4. Способ по п. 1, отличающийся тем, что ограничения параметров траектории и бурения носят многоаспектный и переменный характер и включают в том числе геологические локации, минимизацию затрат и ресурсов при освоении скважины, критерии технико-экономических показателей бурения, аспекты безопасной и безаварийной работы.
5. Способ по п. 1, отличающийся тем, что управление бурением осуществляют в автоматизированном и/или автоматическом режиме с использованием принципов интеллектуального управления.
6. Способ по п. 1, отличающийся тем, что скважину в основном бурят за один рейс с полным информационным обеспечением для дальнейших работ.
7. Способ по п. 1, отличающийся тем, что идентификацию параметров объекта разработки выполняют по инклинометрическим, геофизическим и технологическим измерениям в режиме реального времени.
8. Автоматизированная система оперативного управления бурением скважин, включающая в себя буровые трубы со встроенными кабельными секциями, единую компоновку низа буровой колонны, состоящую из двигателя вентильного электрического бурового привода, под нижним основанием которого размещены блок наддолотный, примыкающий к буровому долоту, блок отклонителя регулируемого, блок электропитания, блок телеметрии и управления, а к верхней головной части двигателя вентильного электрического бурового привода подключена силовая кабельная линия, сформированная в буровых трубах до устья скважины, над двигателем вентильным электрического бурового привода размещены блок инклинометрический и блок геофизический, причем вход/выход блока наддолотного подключен к первому входу/выходу блока телеметрии и управления, второй вход/выход которого соединен с первым входом/выходом блока отклонителя регулируемого, второй вход которого подключен к первому выходу блока электрического питания, вход которого подключен к выходу двигателя вентильного электрического бурового, вход которого соединен с первым входом/выходом силовой кабельной линии связи, и через первую транзитную линию соединен с третьим входом/выходом блока телеметрии и управления, четвертый вход которого подключен к второму выходу блока электрического питания, а пятый вход/выход через вторую транзитную линию соединен с первым входом/выходом блока инклинометрического, который вторым входом/выходом подключен к блоку геофизическому, второй вход/выход силовой кабельной линии на устье скважины подключен к первому выходу наземной станции управления приводом и к первому входу/выходу наземной подсистемы управления бурением, второй вход/выход которой подключен ко второму входу/выходу наземной станции управления приводом, третий его вход/выход подключен к субъекту управления, а его четвертый вход/выход предназначен для подключения к подсистеме информационной поддержки разработки.
9. Система по п. 8, отличающаяся тем, что наземная подсистема управления бурением имеет связь с интегрирующими средствами подсистемы информационной поддержки разработки.
10. Система по п. 8, отличающаяся тем, что блок телеметрии и управления связан с наземной подсистемой управления бурением высокоскоростным и двухсторонним каналом связи забой - поверхность, использующим в качестве среды распространения сигналов силовую кабельную линию.
11. Система по п. 8, отличающаяся тем, что инклинометрические датчики размещены в двух местах - в блоке наддолотном под двигателем вентильным электрическим бурового электропривода и над этим двигателем в блоке инклинометрическом для повышения оперативности и достоверности измерений.
12. Система по п. 8, отличающаяся тем, что регулируемый отклонитель выполнен по роторной управляющей схеме или только с регулируемым углом перекоса.
13. Система по п. 8, отличающаяся тем, что геофизическая аппаратура размещена в блоке наддолотном и в блоке геофизическом для оптимизации геофизических измерений, причем состав геофизической аппаратуры, ее характеристики и размещение обуславливаются решением навигационных и дополнительных задач, сформированных в начале бурения.
14. Система по п. 8, отличающаяся тем, что датчики технологических параметров размещены в блоке наддолотном и в наземных устройствах.
15. Система по п. 8, отличающаяся тем, что наземная подсистема управления бурением является интеллектуальной системой управления.
16. Система по п. 8, отличающаяся тем, что блок телеметрии и управления выполнен на базе программируемой логики и реализует функцию адаптивного бурового регулятора с возможностью оперативной настройки.
17. Система по п. 8, отличающаяся тем, что субъектом управления (лицом, принимающим решение) являются и/или технолог, геолог, буровой мастер и другие уполномоченные лица.
18. Система по п. 8, отличающаяся тем, что статор двигателя вентильного электрического бурового электропривода имеет дополнительные обмотки для питания скважинной аппаратуры и электроприводов исполнительных механизмов в составе компоновки низа буровой колонны.
19. Система по п. 8, отличающаяся тем, что транзитные линии в составе компоновки низа буровой колонны проложены через статор двигателя вентильного электрического бурового привода.
20. Система по п. 15, отличающаяся тем, что в состав наземной подсистемы управления бурением включены наземные средства измерения, вычислитель управляющего воздействия, наземные исполнительные механизмы, формирователи динамических моделей бурового инструмента и призабойной среды, идентификатор, формирователь цели управления, решатель, база знаний, база данных, вычислитель управляющих воздействий, модуль самооценки, интерфейс взаимодействия с подсистемой информационной поддержки разработки.
| US 20150053483 A1, 26.02.2015 | |||
| Устройство для тренировки спортсменов в прыжках с трамплина на лыжах | 1949 |
|
SU82759A1 |
| СИСТЕМА УПРАВЛЕНИЯ БУРОВОЙ УСТАНОВКОЙ | 2016 |
|
RU2667545C1 |
| US 20100147589 A1, 17.06.2010. | |||

