Настоящее изобретение относится к машиностроению, прежде всего к тепловым машинам. Изобретение относится, в частности, к поршневому двигателю внутреннего сгорания (ДВС), имеющему поршень, который подвижно установлен в цилиндре и который шарнирно соединен с шатуном, движение которого передается на кривошип коленчатого вала, при этом между шатуном и кривошипом предусмотрено передаточное звено, которое выполнено с возможностью управления его движением с помощью управляющего рычага с целью обеспечить управляемое перемещение поршня, прежде всего обеспечить возможность изменения степени сжатия и хода поршня, и которое выполнено в виде поперечного рычага, который соединен с кривошипом шарниром, который расположен в промежуточном положении на участке между опорной точкой, в которой поперечный рычаг соединен с шатуном, и опорной точкой, в которой поперечный рычаг соединен с управляющим рычагом, и на некотором удалении от линии, соединяющей между собой обе эти опорные точки, в которых поперечный рычаг соединен с управляющим рычагом и шатуном соответственно.
Из работы Wirbeleit F.G., Binder К. и Gwinner D., "Development of Piston with Variable Compression Height for Incrising Efficiency and Specific Power Output of Combustion Engines", SAE Techn. Pap., 900229, известен ДВС подобного типа с автоматически регулируемой степенью сжатия (ПАРСС) за счет изменения высоты поршня, который состоит из двух частей, между которыми сформированы гидравлические камеры. Изменение степени сжатия осуществляется автоматически путем изменения положения одной части поршня относительно другой за счет перепуска масла из одной такой камеры в другую с помощью специальных перепускных клапанов.
К недостаткам этого технического решения относится то, что системы типа ПАРСС предполагают наличие механизма регулирования степени сжатия, расположенного в высокотемпературной и весьма нагруженной зоне (в цилиндре). Опыт работы с системами типа ПАРСС показал, что на переходных режимах, в частности при разгоне автомобиля, работа ДВС сопровождается детонацией, поскольку гидравлическая система управления не позволяет обеспечить быстрое и одновременное по всем цилиндрам изменение степени сжатия.
Стремление вынести механизм регулирования степени сжатия из высокотемпературной и механически нагруженной зоны привело к появлению иных технических решений, предполагающих изменение кинематической схемы ДВС и введение в нее дополнительных элементов (звеньев), управлением которых обеспечивается изменение степени сжатия.
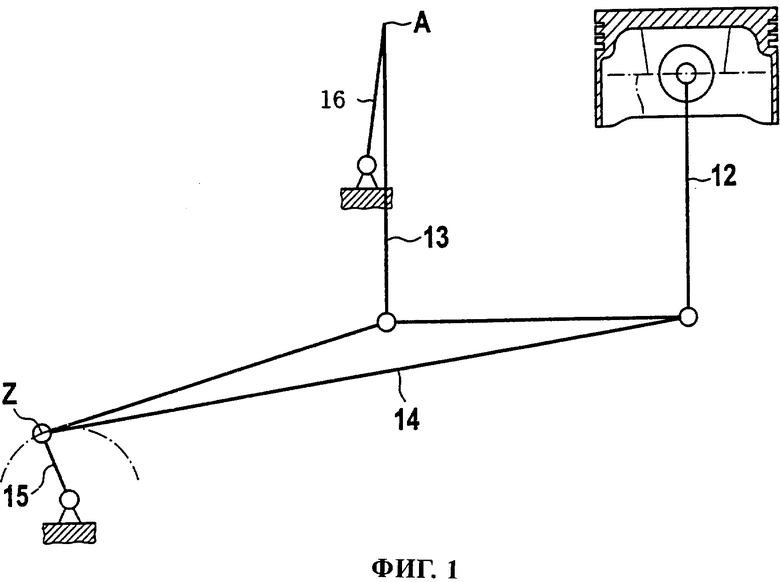
Так, например, у Jante A., "Kraftstoffverbrauchssenkung von Verbrennungsmotoren durch kinematische Mittel", Automobil-Industrie, № 1 (1980), с.с.61-65, описан ДВС (кинематическая схема которого показана на фиг.1), у которого между кривошипом 15 и шатуном 12 установлены два промежуточных звена - дополнительный шатун 13 и коромысло 14. Коромысло 14 совершает качательное движение с центром качания в шарнирной точке Z. Регулирование степени сжатия осуществляется за счет изменения положения точки А путем поворота эксцентрика 16, закрепленного на корпусе. Эксцентрик 16 поворачивается в зависимости от нагрузки двигателя, при этом центр качания, расположенный в шарнирной точке Z, перемещается по дуге окружности, изменяя таким образом положение верхней мертвой точки поршня.
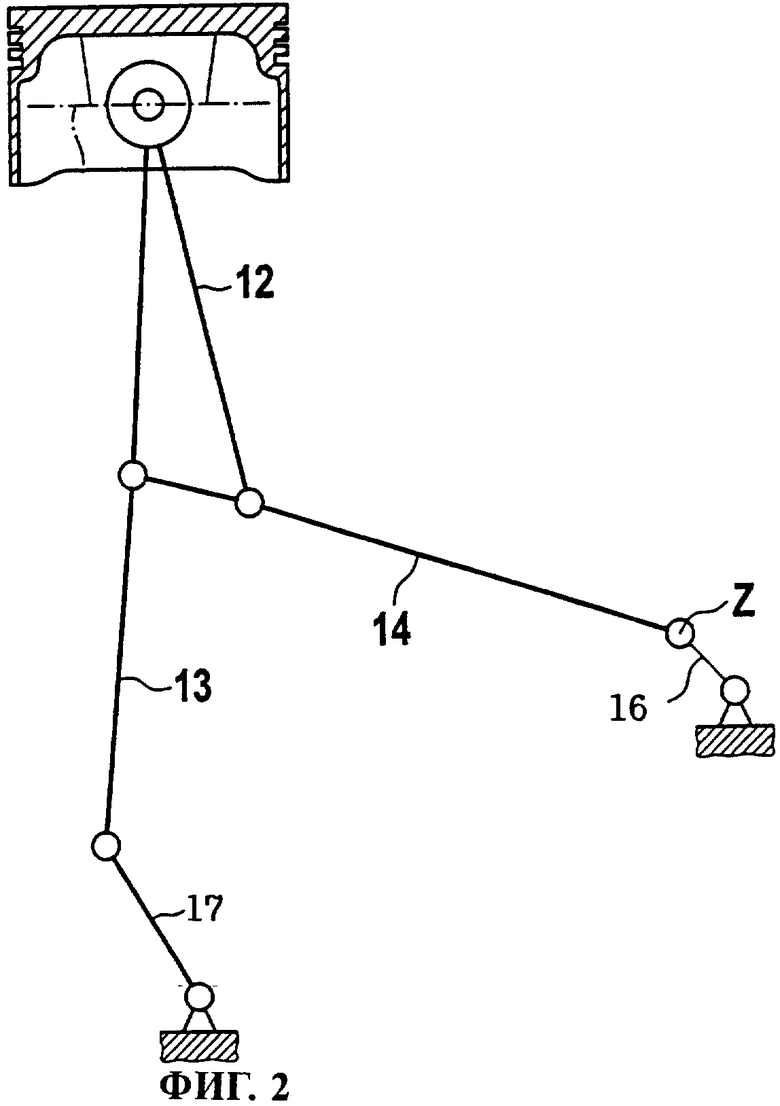
Из работы Christoph Bolling и др., "Kurbetrieb fur variable Verdichtung", MTZ 58 (11) (1997), Сс.706-711, известен также двигатель типа FEV (кинематическая схема которого показана на фиг.2), у которого между кривошипом 17 и шатуном 12 установлен дополнительный шатун 13. Шатун 12, кроме того, связан с коромыслом 14, которое совершает качательное движение с центром качания в шарнирной точке Z. Регулирование степени сжатия осуществляется за счет изменения положения шарнирной точки Z путем поворота эксцентрика 16, закрепленного на корпусе двигателя. Эксцентрик 16 поворачивается в зависимости от нагрузки двигателя, при этом центр качания, расположенный в шарнирной точке Z, перемещается по дуге окружности, изменяя таким образом положение верхней мертвой точки поршня.
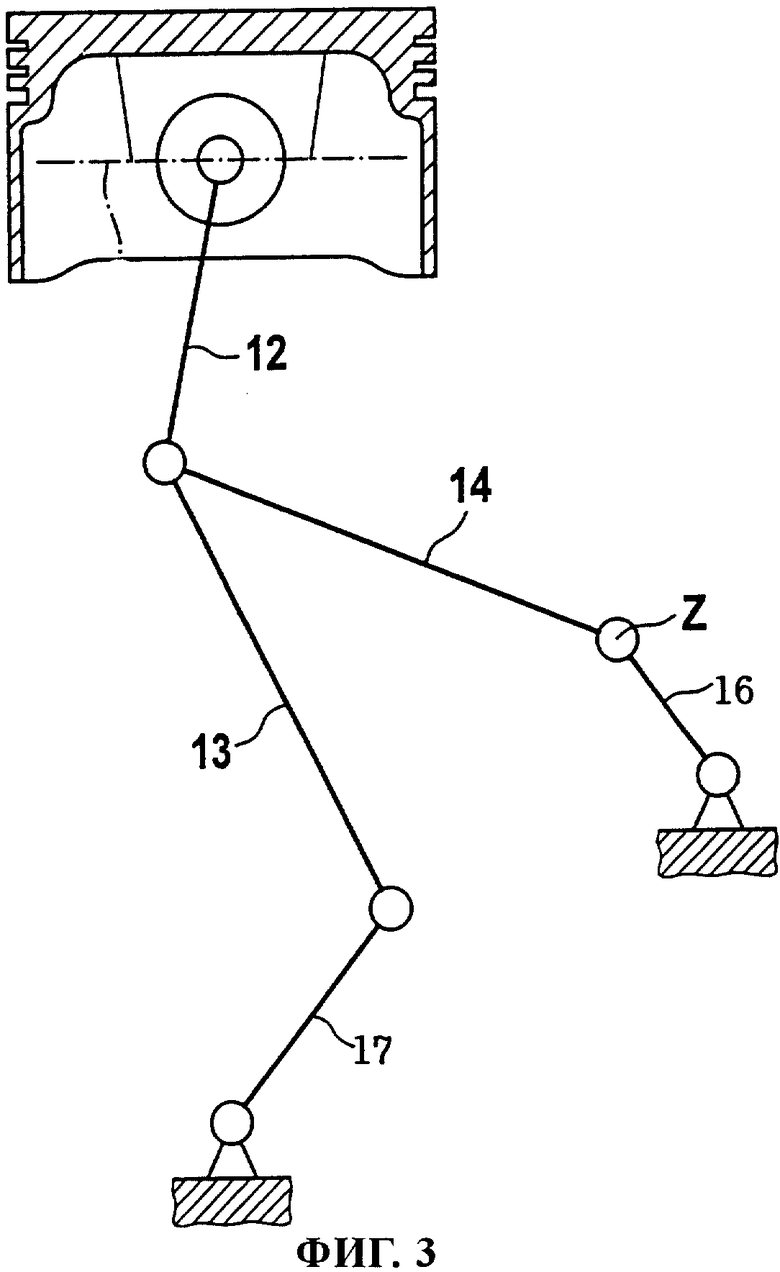
Из заявки DE 4312954 А1 (21.04.1993) известен двигатель типа IFA (кинематическая схема которого показана на фиг.3), у которого между кривошипом 17 и шатуном 12 установлен дополнительный шатун 13. Шатун 12, кроме того, связан с одним из концов коромысла 14, второй конец которого совершает качательное движение с центром качания в шарнирной точке Z. Регулирование степени сжатия осуществляется за счет изменения положения шарнирной точки Z путем поворота эксцентрика 16, который закреплен на корпусе двигателя. Эксцентрик 16 поворачивается в зависимости от нагрузки двигателя, при этом центр качания, расположенный в шарнирной точке Z, перемещается по дуге окружности, изменяя таким образом положение верхней мертвой точки поршня.
К недостаткам, присущим двигателям вышеописанных конструкций (известным из работы Jante А., из работы Christoph Bolling и др. и из заявки DE 4312954 А1), следует отнести в первую очередь недостаточно высокую плавность их работы, обусловленную высокими силами инерции второго порядка при возвратно-поступательном движении масс, что связано с особенностями кинематики механизмов и приводит к чрезмерному увеличению общей ширины или общей высоты силового агрегата. По этой причине такие двигатели практически не пригодны для их использования в качестве двигателей для транспортных средств.
Регулирование степени сжатия в поршневом ДВС позволяет решить следующие задачи:
- повысить среднее давление Ре путем увеличения давления наддува без увеличения максимального давления сгорания сверх заданных пределов за счет уменьшения степени сжатия по мере увеличения нагрузки двигателя;
- снизить расход топлива в диапазоне малых и средних нагрузок за счет увеличения степени сжатия по мере уменьшения нагрузки двигателя;
- повысить плавность работы двигателя.
Регулирование степени сжатия позволяет в зависимости от типа ДВС достичь следующих преимуществ (для ДВС с принудительным (искровым) зажиганием):
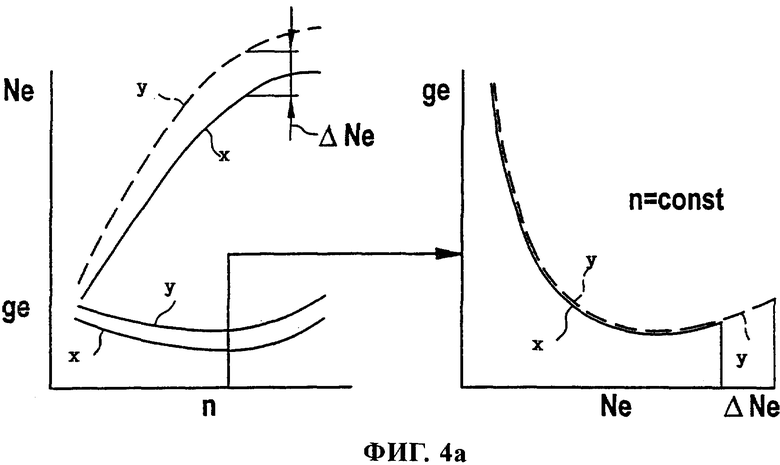
- при сохранении достигнутого уровня экономичности двигателя при малых и средних нагрузках обеспечивается дальнейшее повышение номинальной мощности двигателя за счет увеличения давления наддува при уменьшении степени сжатия (см. фиг.4а, где кривые, обозначенные позицией х, относятся к обычному двигателю, а кривые, обозначенные позицией у, относятся к двигателю с переменной степенью сжатия);
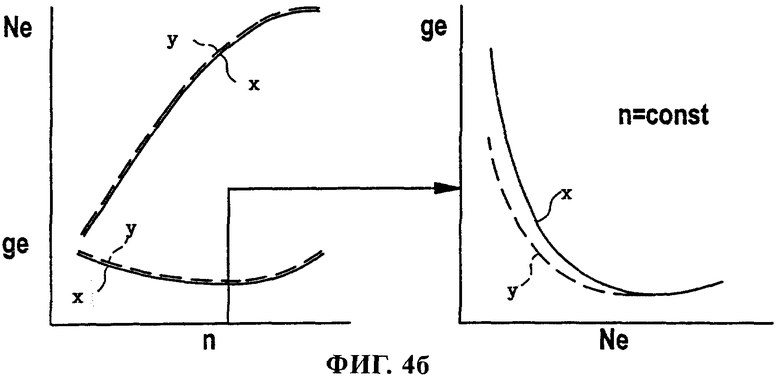
- при сохранении достигнутого уровня номинальной мощности двигателя обеспечивается снижение расхода топлива при малых и средних нагрузках за счет увеличения степени сжатия до допустимого по детонации предела (см. фиг.4б, где кривые, обозначенные позицией х, относятся к обычному двигателю, а кривые, обозначенные позицией у, относятся к двигателю с переменной степенью сжатия);
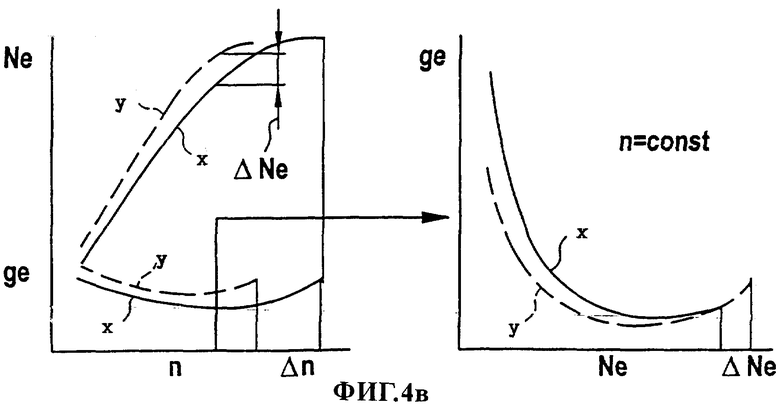
- при сохранении достигнутого уровня номинальной мощности двигателя повышается экономичность при малых и средних нагрузках, а также снижается уровень шума двигателя при одновременном снижении номинальной частоты вращения коленчатого вала (см. фиг.4в, где кривые, обозначенные позицией х, относятся к обычному двигателю, а кривые, обозначенные позицией у, относятся к двигателю с переменной степенью сжатия).
Аналогично ДВС с искровым зажиганием регулирование степени сжатия в дизельном двигателе может вестись в трех следующих равноправных направлениях:
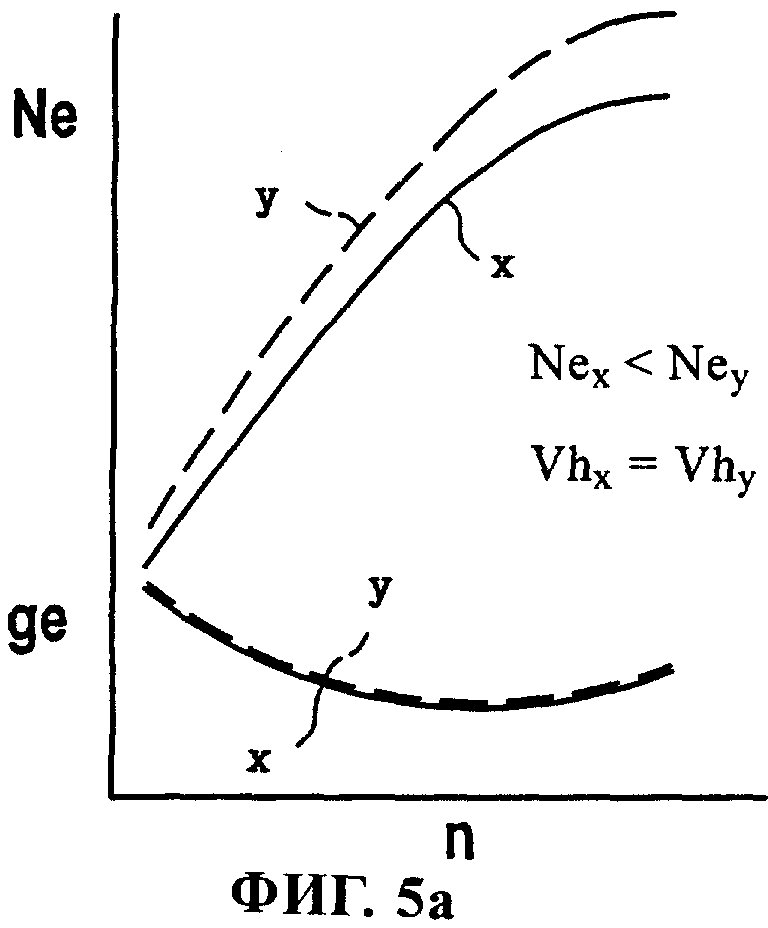
- при неизменном рабочем объеме и номинальной частоте вращения мощность двигателя повышают за счет увеличения давления наддува. В этом случае повышается не экономичность, а мощность транспортного средства (см. фиг.5а, где кривые, обозначенные позицией х, относятся к обычному двигателю, а кривые, обозначенные позицией у, относятся к двигателю с переменной степенью сжатия);
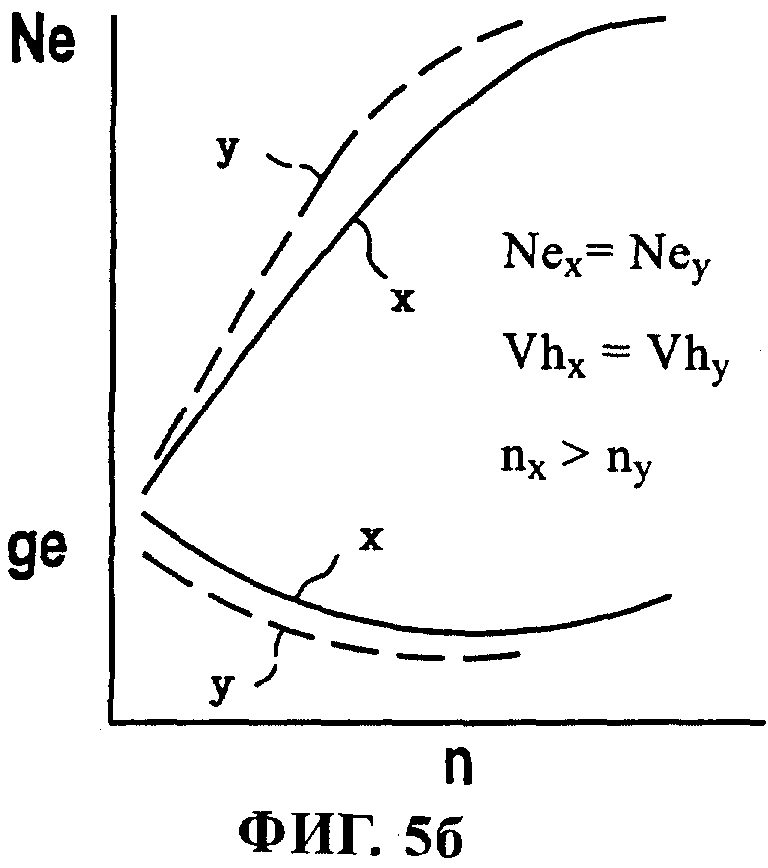
- при неизменном рабочем объеме и номинальной мощности повышают среднее давление Ре при снижении номинальной частоты вращения. В этом случае при сохранении мощностных характеристик транспортного средства повышается экономичность двигателя за счет повышения механического КПД (см. фиг.5б, где кривые, обозначенные позицией х, относятся к обычному двигателю, а кривые, обозначенные позицией у, относятся к двигателю с переменной степенью сжатия);
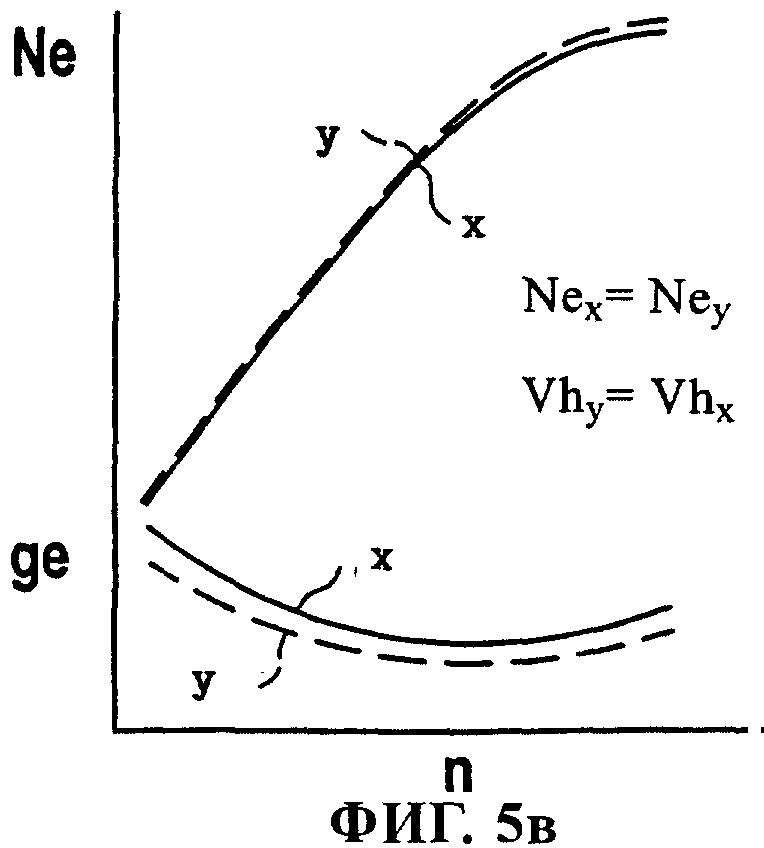
- существующий двигатель большого рабочего объема на заменяют на двигатель малого рабочего объема, но той же мощности (см. фиг.5в, где кривые, обозначенные позицией х, относятся к обычному двигателю, а кривые, обозначенные позицией у, относятся к двигателю с переменной степенью сжатия). В этом случае повышается экономичность двигателя в диапазоне средних и полных нагрузок, а также уменьшается масса и габариты двигателя.
В основу настоящего изобретения была положена задача усовершенствовать кинематику поршневого ДВС таким образом, чтобы при малых конструктивных затратах обеспечивать возможность регулирования степени сжатия при одновременном снижении реакции в опорах и сил инерции второго порядка.
В отношении поршневого ДВС указанного в начале описания типа эта задача решается согласно изобретению благодаря тому, что длина стороны, расположенной между опорной точкой, в которой поперечный рычаг соединен с управляющим рычагом, и опорной точкой, в которой поперечный рычаг соединен с шатуном, длина стороны, расположенной между опорной точкой, в которой поперечный рычаг соединен с управляющим рычагом, и шарниром, которым поперечный рычаг соединен с кривошипом, и длина стороны, расположенной между опорной точкой, в которой поперечный рычаг соединен с шатуном, и шарниром, которым поперечный рычаг соединен с кривошипом, удовлетворяют в пересчете на радиус кривошипа следующим соотношениям:
4,0r≤а≤7,0r,
2,2r≤b≤5,5r,
1,2r≤c≤3,5r.
Согласно одному из предпочтительных вариантов выполнения предлагаемого в изобретении поршневого ДВС поперечный рычаг выполнен в виде треугольного рычага, в вершинах которого расположены опорные точки, в которых поперечный рычаг соединен с управляющим рычагом и шатуном, и шарнир, которым поперечный рычаг соединен с кривошипом.
Предпочтительно, чтобы длина l шатуна и длина k управляющего рычага, а также расстояние е между осью вращения коленчатого вала и продольной осью цилиндра удовлетворяли в пересчете на радиус г кривошипа следующим соотношениям:
3,8r≤l≤5,2r,
2,8r≤k≤5,2r,
1,1r≤e≤1,9r.
В том случае, когда управляющий рычаг и шатун расположены по одну сторону поперечного рычага, расстояние f между продольной осью цилиндра и точкой шарнирного соединения управляющего рычага с корпусом ДВС и расстояние р между осью коленчатого вала и указанной точкой шарнирного соединения предпочтительно должны удовлетворять в пересчете на радиус r кривошипа следующим соотношениям:
2,8r≤f≤4,8r,
4,8r≤р≤7,2r.
В том же случае, когда управляющий рычаг и шатун расположены по разные стороны поперечного рычага, расстояние f между продольной осью цилиндра и точкой шарнирного соединения управляющего рычага и расстояние р между осью коленчатого вала и указанной точкой шарнирного соединения предпочтительно должны удовлетворять в пересчете на радиус г кривошипа следующим соотношениям:
5,5r≤f≤8,2r,
-1,0r≤p≤0,7r.
В соответствии со следующим предпочтительным вариантом выполнения предлагаемого в изобретении поршневого ДВС точка шарнирного соединения управляющего рычага имеет возможность перемещения по управляемой траектории.
Предпочтительно далее предусмотреть возможность регулирования положения точки шарнирного соединения управляющего рычага с помощью опирающегося на шарнир дополнительного кривошипа либо с помощью эксцентрика.
Предпочтительно также предусмотреть возможность фиксации точки шарнирного соединения управляющего рычага в различных регулируемых угловых положениях.
В соответствии еще с одним предпочтительным вариантом выполнения предлагаемого в изобретении поршневого ДВС предусмотрена возможность регулирования углового положения точки шарнирного соединения управляющего рычага в зависимости от характеризующих режим работы ДВС величин и рабочих параметров ДВС.
Согласно еще одному предпочтительному варианту выполнения предлагаемого в изобретении поршневого ДВС предусмотрена возможность синхронизированного с вращением коленчатого вала движения точки шарнирного соединения управляющего рычага по управляемой траектории.
В другом предпочтительном варианте выполнения предлагаемого в изобретении поршневого ДВС предусмотрена возможность синхронизированного с вращением коленчатого вала движения точки шарнирного соединения управляющего рычага по управляемой траектории и возможность регулирования фазового сдвига между движением этой точки и вращением коленчатого вала в зависимости от характеризующих режим работы ДВС величин и рабочих параметров ДВС.
В соответствии со следующим предпочтительным вариантом выполнения предлагаемого в изобретении поршневого ДВС предусмотрена возможность синхронизированного с вращением коленчатого вала движения точки шарнирного соединения управляющего рычага по управляемой траектории, при этом предусмотрена возможность изменения передаточного отношения между движением указанной точки и вращением коленчатого вала.
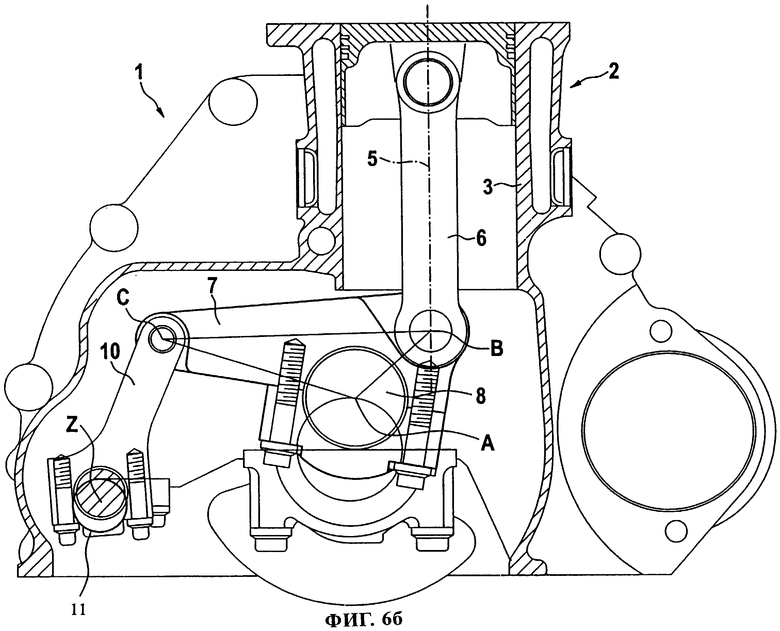
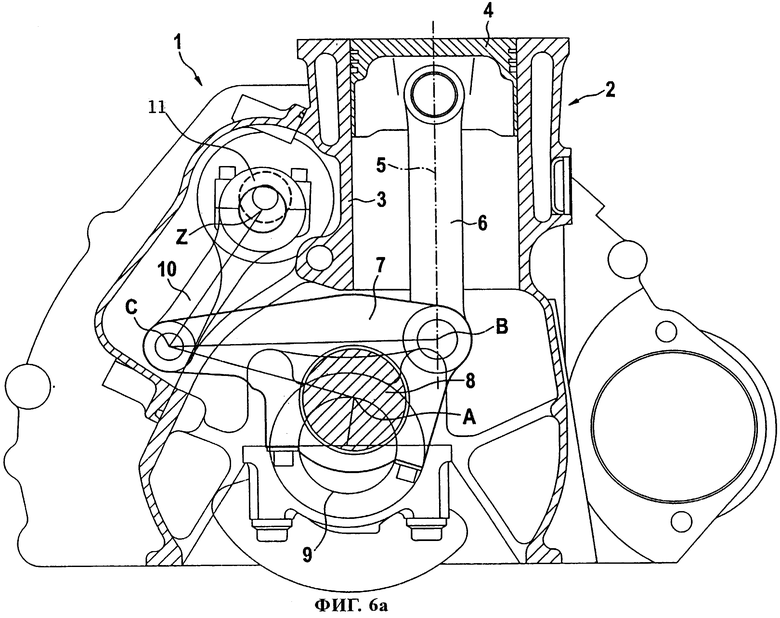
Предлагаемый в изобретении поршневой ДВС 1 показан на фиг.6а и 6б и имеет корпус 2 с цилиндром 3 и установленным в нем поршнем 4, шатун 6, который шарнирно соединен одним концом с поршнем 4, кривошип 8 коленчатого вала, установленного в корпусе 2, прицепной шатун 10, называемый также управляющим рычагом 10 и шарнирно соединенный одним его концом с корпусом 2, и треугольный поперечный рычаг 7, который одной его вершиной шарнирно соединен со вторым концом шатуна 6, второй его вершиной шарнирно соединен с кривошипом 8, а третьей его вершиной шарнирно соединен с прицепным шатуном 10. Для регулирования степени сжатия ось качания прицепного шатуна 10, т.е. точка Z его шарнирного соединения имеет возможность перемещения по управляемой траектории, определяемой, например, эксцентриком или дополнительным кривошипом 11.
В зависимости от положения оси качания прицепного шатуна предлагаемый в изобретении поршневой ДВС имеет два варианта конструктивного исполнения (см. фиг.6а и 6б):
- в первом варианте (фиг.6а) горизонтальная плоскость, в которой лежит ось качания прицепного шатуна 10, т.е. точка Z его шарнирного соединения расположена выше точки соединения кривошипа 8 с поперечным рычагом 7 при нахождении кривошипа в его верхней мертвой точке или, иными словами, прицепной шатун 10 и шатун 6 расположены по одну сторону поперечного рычага 7;
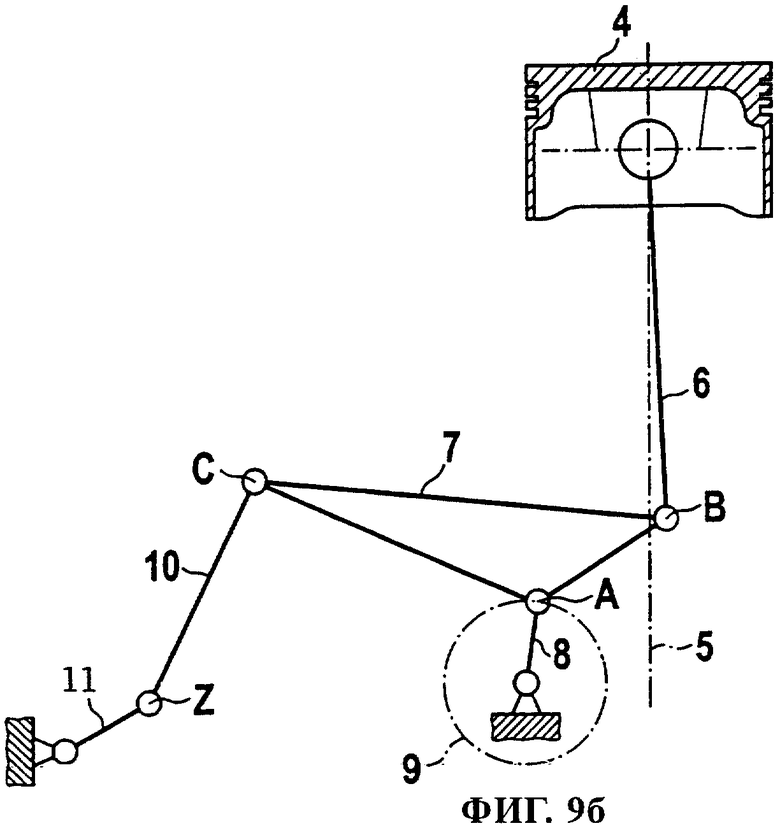
- во втором варианте (фиг.6б) горизонтальная плоскость, в которой лежит ось качания прицепного шатуна 10, т.е. точка Z его шарнирного соединения расположена ниже точки соединения кривошипа 8 с поперечным рычагом 7 при нахождении кривошипа в его верхней мертвой точке или, иными словами, прицепной шатун 10 и шатун 6 расположены по разные стороны поперечного рычага 7.
Изменение положения точки Z шарнирного соединения прицепного рычага, т.е. его оси качания, позволяет за счет простого управляющего движения, осуществляемого дополнительным кривошипом, соответственно регулирующим эксцентриком, изменять степень сжатия. Помимо этого точка Z шарнирного соединения прицепного рычага, т.е. его ось качания может совершать непрерывное циклическое движение, синхронизированное с вращением коленчатого вала.
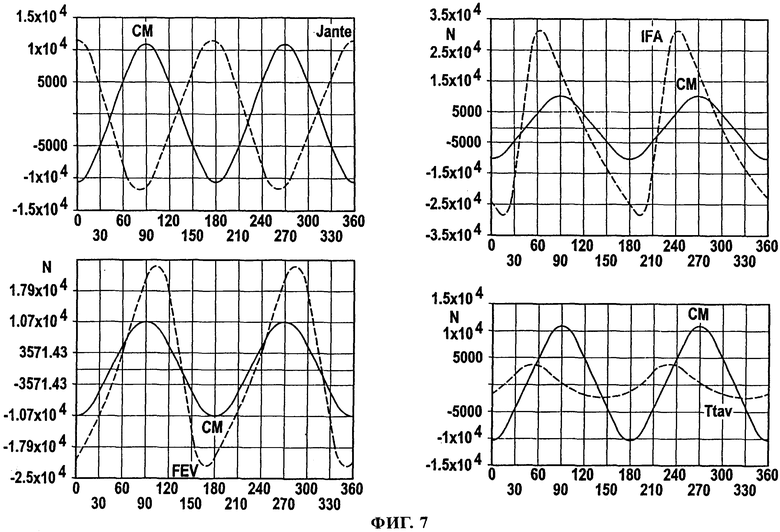
Как показано на фиг.7, предлагаемый в изобретении поршневой ДВС обладает значительными преимуществами перед известными системами (описанными у Jante А., у Christoph Bolling и др. и в DE 4312954 А1), а также перед обычным кривошипно-шатунным механизмом (СМ) касательно плавности его работы.
Однако указанные преимущества могут быть достигнуты только при соблюдении определенных геометрических соотношений, а именно, при правильном подборе длин отдельных элементов и их положений относительно оси коленчатого вала.
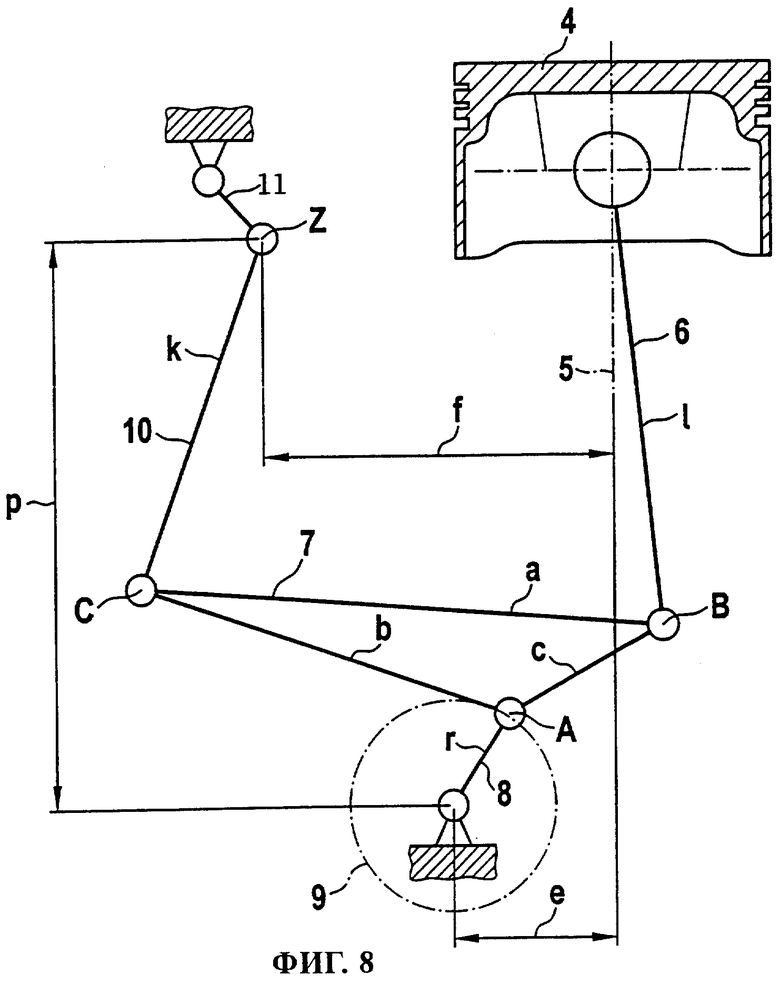
Согласно настоящему изобретению важное значение имеет определение размеров отдельных элементов (по отношению к радиусу кривошипа) и координат отдельных шарниров механизма передачи усилий, чего можно достичь за счет оптимизации такого механизма путем кинематического и динамического анализа. Цель оптимизации подобного, описываемого девятью параметрами механизма (фиг.8) состоит в уменьшении сил (нагрузки), действующих на его отдельные звенья, до минимально возможного уровня и в повышении плавности его работы.
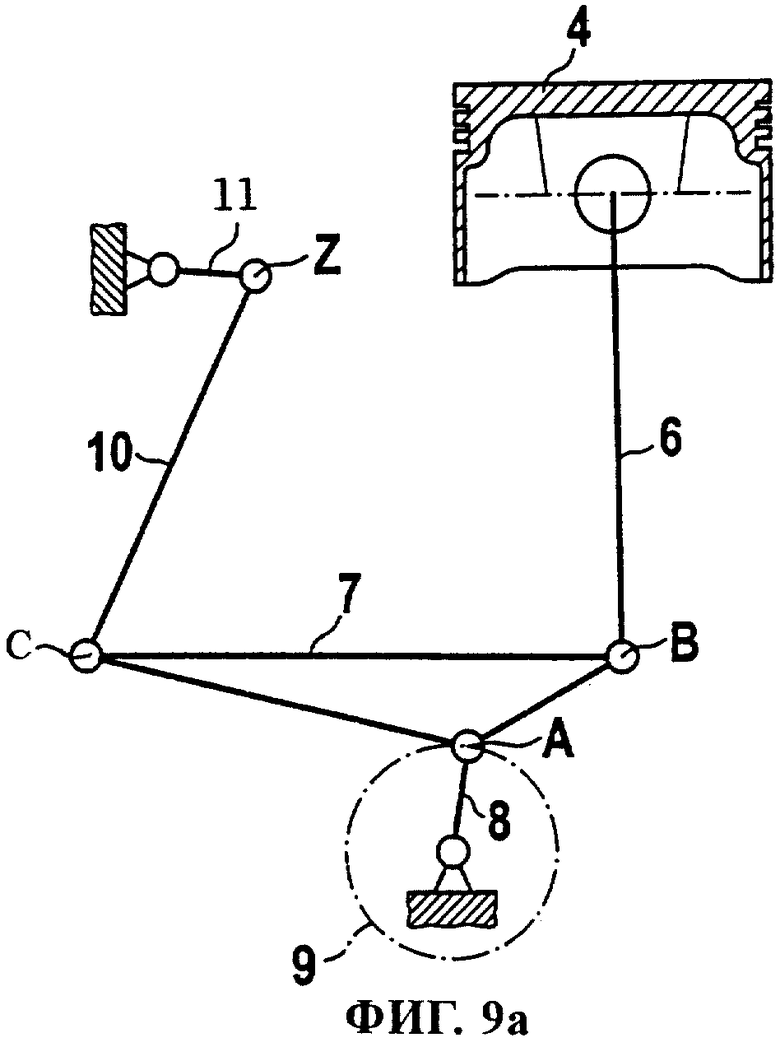
Ниже со ссылкой на фиг.9 (9а и 9б), где изображена кинематическая схема ДВС, показанного на фиг.6 (6а и 6б соответственно), поясняется принцип работы регулируемого кривошипно-шатунного механизма. В процессе работы ДВС его поршень 4 совершает в цилиндре возвратно-поступательное движение, которое передается на шатун 6. Движение шатуна 6 передается через опорную (шарнирную) точку В на поперечный рычаг 7, свобода перемещения которого ограничена за счет его соединения с прицепным шатуном 10 в опорной (шарнирной) точке С. Если точка Z шарнирного соединения прицепного шатуна 10 неподвижна, то опорная точка С поперечного рычага 7 может совершать движение по дуге окружности, радиус которой равен длине прицепного шатуна 10. Положение такой круговой траектории движения опорной точки С относительно корпуса двигателя определяется положением точки Z. При изменении положения точки Z шарнирного соединения прицепного шатуна изменяется положение круговой траектории, по которой может перемещаться опорная точка С, что позволяет влиять на траектории движения других элементов кривошипно-шатунного механизма, прежде всего на положение в.м.т. поршня 4. Точка Z шарнирного соединения прицепного шатуна предпочтительно перемещается по круговой траектории. Однако точка Z шарнирного соединения прицепного шатуна может также перемещаться и по любой иной заданной управляемой траектории, при этом возможна также фиксация точки Z шарнирного соединения прицепного шатуна в любом положении траектории ее перемещения.
Поперечный рычаг 7 шарниром А соединен также с кривошипом 8 коленчатого вала 9. Этот шарнир А движется по круговой траектории, радиус которой определяется длиной кривошипа 8. Шарнир А занимает промежуточное положение, если смотреть вдоль линии, соединяющей между собой опорные точки В и С поперечного рычага 7. Наличие кинематической связи опорной точки С с прицепным шатуном 10 позволяет влиять на ее поступательное движение вдоль продольной оси 5 поршня 4. Перемещение опорной точки В вдоль продольной оси 5 поршня определяется траекторией движения опорной точки С поперечного рычага 7. Влияние на перемещение опорной точки В позволяет управлять возвратно-поступательным движением поршня 4 через шатун 6 и тем самым регулировать положение в.м.т. поршня 4.
В показанном на фиг.9а варианте прицепной шатун 10 и шатун 6 расположены по одну сторону поперечного рычага 7.
Поворотом выполненного в виде дополнительного кривошипа 11 регулирующего звена из показанного на фиг.9а примерно горизонтального положения, например, в обращенное вертикально вниз положение позволяет сместить положение в.м.т. поршня 4 вверх и тем самым увеличить степень сжатия.
На фиг.9б показана кинематическая схема выполненного по другому варианту ДВС, отличающаяся от показанной на фиг.9а схемы лишь тем, что прицепной шатун 10 вместе с выполненным в виде дополнительного кривошипа 11, соответственно регулирующего эксцентрика регулирующим звеном и шатун 6 расположены по разные стороны поперечного рычага 7. Во всем остальном принцип действия показанного на фиг.9б кривошипно-шатунного механизма аналогичен принципу действия показанного на фиг.9а кривошипно-шатунного механизма, у которого прицепной шатун 10 и шатун 6 расположены по одну сторону поперечного рычага 7.
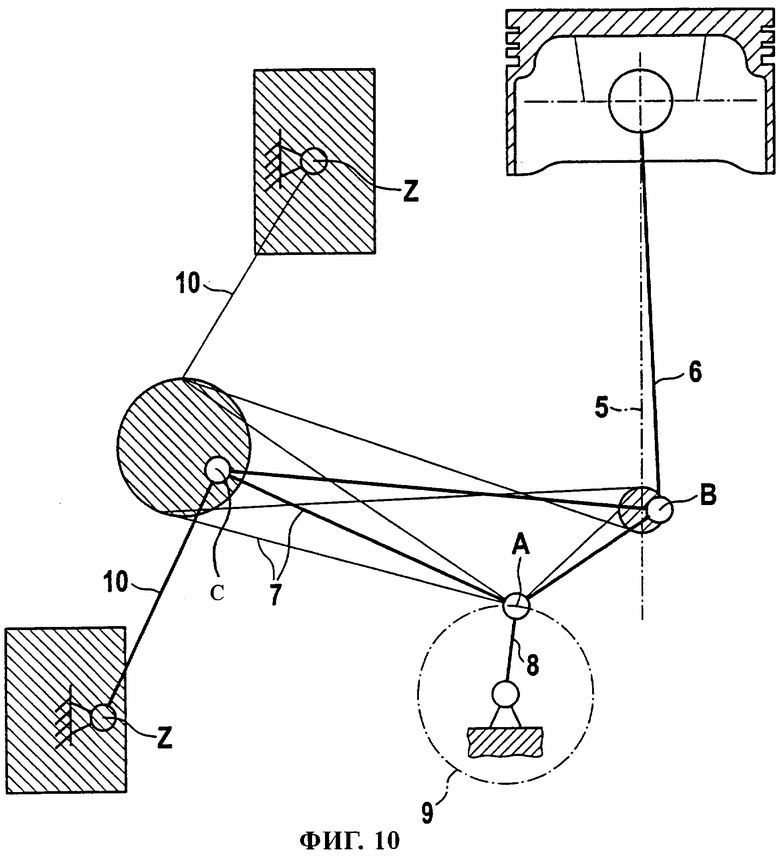
На фиг.10 показана еще одна кинематическая схема кривошипно-шатунного механизма поршневого ДВС, на которой представлены положения определенных точек этого кривошипно-шатунного механизма и на которой штриховкой обозначены оптимальные области, в пределах которых с учетом упомянутых выше оптимальных областей значений для длин и положений элементов кривошипно-шатунного механизма могут перемещаться опорная точка В шарнирного соединения поперечного рычага 7 с шатуном 6, опорная точка С шарнирного соединения поперечного рычага 7 с прицепным шатуном 10 и точка Z шарнирного соединения прицепного шатуна 10. Для обеспечения особо плавной работы ДВС с исключительно малой нагрузкой на отдельные элементы и звенья его кривошипно-шатунного механизма геометрические параметры (длина и положение) элементов и звеньев этого кривошипно-шатунного механизма должны удовлетворять определенным, предпочтительным соотношениям. Длины сторон a, b и с треугольного поперечного рычага 7, где а обозначает длину стороны, расположенной между опорной точкой В шатуна и опорной точкой С прицепного шатуна, b обозначает длину стороны, расположенной между шарниром А кривошипа и опорной точкой С прицепного шатуна, а с обозначает расстояние между шарниром А кривошипа и опорной точкой В шатуна, можно описать следующими неравенствами в зависимости от радиуса г, который равен длине кривошипа 8:
4,0r≤a≤7,0r,
2,2r≤b≤5,5r,
1,2r≤c≤3,5r.
Длина l шатуна 6, длина k прицепного шатуна 10 и расстояние е между осью вращения коленчатого вала 9 и продольной осью 5 цилиндра 3, которая одновременно является и продольной осью поршня, перемещающегося в этом цилиндре, согласно предпочтительному варианту удовлетворяют следующим соотношениям:
3,8r≤l≤5,2r,
2,8r≤k≤6,2r,
1,1r≤e≤2,6r.
Для показанного на фиг.9а варианта, в котором шатун 6 и прицепной шатун 10 располагаются по одну сторону поперечного рычага 7, также можно задать оптимальное соотношение размеров. При этом расстояние f между продольной осью 5 цилиндра и точкой Z шарнирного соединения прицепного рычага 10 к его регулирующему звену, а также расстояние р между осью коленчатого вала и указанной точкой Z шарнирного соединения согласно предпочтительному варианту удовлетворяют следующим соотношениям:
2,8r≤f≤5,8r,
4,8r≤p≤9,5r.
При расположении прицепного шатуна и шатуна по разные стороны поперечного рычага оптимальное расстояние f между продольной осью поршня и точкой Z шарнирного соединения прицепного рычага к его регулирующему звену, а также оптимальное расстояние р между осью коленчатого вала и указанной точкой Z шарнирного соединения можно выбирать исходя из следующих соотношений:
5,5r≤f≤8,2r,
-1,0r≤р≤0,7r.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ИЗМЕНЯЕМОЙ СТЕПЕНЬЮ СЖАТИЯ | 2013 |
|
RU2530670C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2019 |
|
RU2704510C1 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2021 |
|
RU2776460C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ПЕРЕМЕННОЙ СТЕПЕНЬЮ СЖАТИЯ | 2021 |
|
RU2762475C1 |
| Двухтактный двухпоршневой двигатель внутреннего сгорания | 2020 |
|
RU2744797C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2436973C1 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2020 |
|
RU2739105C1 |
| Двухтактный поршневой двигатель внутреннего сгорания и способ его работы | 2019 |
|
RU2729562C1 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2022 |
|
RU2787437C1 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2020 |
|
RU2739104C1 |
Изобретение относится к машиностроению, прежде всего к тепловым машинам, а именно к поршневому двигателю внутреннего сгорания (ДВС) с переменной степенью сжатия. Технический результат изобретения заключается в усовершенствовании кинематики механизма передачи усилий поршневого ДВС, таким образом, чтобы обеспечивать возможность регулирования степени сжатия при одновременном снижении реакции в опорах и сил инерции второго порядка. ДВС согласно изобретению имеет подвижно установленный в цилиндре поршень, который шарнирно соединен с шатуном. Движение шатуна передается на кривошип коленчатого вала. При этом, с целью обеспечения возможности управляемого изменения степени сжатия и хода поршня, между шатуном и кривошипом предусмотрено передаточное звено, которое выполнено с возможностью управления его движением с помощью управляющего рычага. Передаточное звено выполнено в виде поперечного рычага, соединенного с кривошипом посредством шарнира, который расположен в промежуточном положении на участке между двумя опорными точками. В одной из опорных точек поперечный рычаг соединен с шатуном, а в другой - с управляющим рычагом. Управляющий рычаг также шарнирно соединен с дополнительным кривошипом или эксцентриком, которые осуществляют управляющие движения, смещая ось качения управляющего рычага, чем обеспечивают изменение степени сжатия ДВС. Помимо этого ось качения управляющего рычага может совершать непрерывное циклическое движение, синхронизированное с вращением коленчатого вала. При этом, в случае соблюдения определенных геометрических соотношений между отдельными звенья механизма передачи усилий, могут быть уменьшены нагрузки на них и повышена плавность работы ДВС. 12 з.п. ф-лы, 10 ил.
4,0r≤а≤7,0r,
2,2r≤b≤5,5r,
1,2r≤c≤3,5r.
3,8r≤1≤5,2r,
2,8r≤k≤5,2r,
1,1r≤е≤1,9r.
2,8r≤f≤4,8r,
4,8r≤p≤7,2r.
5,5r≤f≤8,2r,
-1,0r≤p≤0,7r.
| US 2909164 А, 20.10.1959 | |||
| СПОСОБ СОЕДИНЕНИЯ ДЕТАЛЕЙ | 2003 |
|
RU2249131C1 |
| GB 353986 A, 06.08.1931 | |||
| Устройство для возведения в квадрат | 1976 |
|
SU607215A1 |
| US 5595146 А, 21.01.1997 | |||
| DE 4312954 А1, 27.10.1994 | |||
| Двигатель внутреннего сгорания с переменным ходом поршня | 1988 |
|
SU1686203A1 |

