Группа изобретений относится к аппаратам на воздушной подушке, оснащенным системой автоматического управления колебаниями по углам тангажа и крена для обеспечения продольной и поперечной устойчивости движения аппарата на воздушной подушке.
Из уровня техники известны аппараты на воздушной подушке (далее - АВП), оснащенные системой стабилизации. Так, в патенте США №5454440, МПК B 60 V 1/12, НПК 180/118, дата публикации 03.10.1995, принятом за наиболее близкий аналог каждого из вариантов изобретения, представлен АВП, содержащий корпус, ограждение воздушной подушки, снабженное воздуховодом, разделенным, по меньшей мере, на две изолированные полости, и гибким ограждением, силовую установку, содержащую, по меньшей мере, один двигатель, соединенный посредством трансмиссии с воздушным движителем, по меньшей мере, один нагнетатель для создания воздушной подушки, пневматически связанный, по меньшей мере, с двумя изолированными полостями, каждая из которых оснащена управляемой заслонкой, систему управления, содержащую датчики углов, угловой скорости и/или углового ускорения тангажа и крена, датчики давления, а также вычислитель, вырабатывающий по сигналам от указанных датчиков сигнал на отклонение соответствующей заслонки. Недостатком данного АВП является необходимость принятия дополнительных мер для увеличения восстанавливающего момента при изменении угла тангажа и крена в связи с небольшим удалением центра давления силы, создающей восстанавливающий момент.
Решаемой группой изобретений задачей является повышение продольной и поперечной устойчивости движения АВП по взволнованной водной и неровной грунтовой поверхностям путем автоматического управления колебаниями АВП направленным изменением моментов тангажа и крена за счет перераспределения потоков воздуха за нагнетателями воздушной подушки в ее отдельные секции.
Технический результат группы изобретений состоит в обеспечении продольной и поперечной устойчивости движения АВП по взволнованной водной и неровной грунтовой поверхностям путем автоматического управления колебаниями АВП, обеспечивающего уменьшение амплитуд угловых перемещений и перегрузок АВП, обусловленных возмущающим воздействием неровностей пути.
Группа изобретений характеризуется следующей совокупностью существенных признаков.
АВП по 1-му варианту, как и в наиболее близком аналоге, представленном в патенте США №5454440, содержит корпус, ограждение воздушной подушки, снабженное воздуховодом, разделенным, по меньшей мере, на две изолированные полости, и гибким ограждением, силовую установку, содержащую, по меньшей мере, один двигатель, соединенный посредством трансмиссии с воздушным движителем, по меньшей мере, один нагнетатель для создания воздушной подушки, пневматически связанный, по меньшей мере, с двумя изолированными полостями, каждая из которых оснащена управляемой заслонкой, систему управления, содержащую датчики углов, угловой скорости и/или углового ускорения тангажа и крена, датчики давления, а также вычислитель, вырабатывающий по сигналам от указанных датчиков сигнал на отклонение соответствующей заслонки, но в отличие от наиболее близкого аналога воздуховод расположен вдоль периметра корпуса аппарата на воздушной подушке, разделен мембранами, по меньшей мере, на две изолированные полости, пневматически связанные с элементами гибкого ограждения, образованного конусными элементами, соприкасающимися друг с другом боковыми поверхностями, каждый конусный элемент оснащен расположенными внутри своей полости двумя перфорированными диафрагмами, выполненными смыкающимися друг с другом выше нижних кромок конусного элемента, при этом одна диафрагма простирается от нижней наружной кромки конусного элемента, а другая - от нижней внутренней кромки конусного элемента, за воздушным движителем расположены аэродинамические вертикальные и/или горизонтальные рули, при этом датчики давления размещены в полости конусных элементов не чаше, чем в каждом третьем конусном элементе, а с вычислителем связаны привод механизма отклонения соответствующей заслонки и привод механизма отклонения соответствующих аэродинамических горизонтальных рулей.
АВП характеризуется тем, что за воздушными движителями расположены аэродинамические вертикальные рули.
АВП характеризуется тем, что он оснащен двумя воздушными движителями, вычислитель связан с приводами механизмов отклонения аэродинамических горизонтальных рулей, обеспечивающих по управляющему сигналу с вычислителя отклонение аэродинамических горизонтальных рулей в разных направлениях для создания момента по крену.
АВП характеризуется тем, что стенки воздуховода ограждения выполнены в виде жесткого короба.
АВП характеризуется тем, что внешняя стенка воздуховода ограждения выполнена из гибкого материала, закрепленного в верхней части по периметру корпуса, а в нижней части - посредством разъемного соединения с конусными элементами.
При этом выполненная из гибкого материала стенка воздуховода между местом крепления внешней стенки и разъемными элементами соединения с конусными элементами соединена вдоль периметра корпуса с бортами корпуса посредством перфорированной мембраны.
АВП характеризуется тем, что, по меньшей мере, один из воздушных движителей выполнен в виде винта в кольце.
АВП характеризуется тем, что нагнетатели выполнены в виде, по меньшей мере, двух осевых вентиляторов, входной патрубок каждого из которых направлен в сторону носа АВП.
АВП характеризуется тем, что двигатель соединен посредством трансмиссии, по меньшей мере, с одним воздушным движителем для создания тяги и с одним или более нагнетателями для создания воздушной подушки, при этом трансмиссия передачи крутящего момента на валы каждого из воздушных движителей и каждого из нагнетателей содержит ременную передачу.
АВП по 2-му варианту, как и в наиболее близком аналоге, представленном в патенте США №5454440, содержит корпус, ограждение воздушной подушки, снабженное воздуховодом, разделенным, по меньшей мере, на две изолированные полости, и гибким ограждением, силовую установку, содержащую, по меньшей мере, один двигатель, соединенный посредством трансмиссии с воздушным движителем, по меньшей мере, один нагнетатель для создания воздушной подушки, пневматически связанный, по меньшей мере, с двумя изолированными полостями, каждая из которых оснащена управляемой заслонкой, систему управления, содержащую датчики углов, угловой скорости и/или углового ускорения тангажа и крена, датчики давления, а также вычислитель, вырабатывающий по сигналам от указанных датчиков сигнал на отклонение соответствующей заслонки, но в отличие от наиболее близкого аналога воздуховод расположен вдоль периметра корпуса аппарата на воздушной подушке, изолированные полости пневматически связаны с гибким ограждением, состоящим из конусных элементов, соприкасающихся друг с другом боковыми поверхностями, гибкое ограждение содержит, по меньшей мере, две секции, каждая из которых образована посредством обеспечения пневматической связи, по меньшей мере, полостей двух смежных конусных элементов, за воздушным движителем расположены аэродинамические горизонтальные рули, при этом датчики давления размещены в полости пневматически связанных между собой конусных элементов, а с вычислителем связаны привод механизма отклонения соответствующей заслонки и привод механизма отклонения соответствующих аэродинамических горизонтальных рулей.
АВП характеризуется тем, что пневматическая связь объединенных, по меньшей мере, в одной секции полостей смежных конусных элементов выполнена в виде отверстия в верхней части смежных боковых поверхностей конусных элементов.
АВП характеризуется тем, что пневматическая связь объединенных, по меньшей мере, в одной секции полостей смежных конусных элементов выполнена в виде канала, образованного посредством выполнения смежных боковых стенок конусных элементов в средней части меньшей высоты по сравнению с крайними боковыми стенками конусных элементов, при этом указанные смежные боковые стенки могут быть скреплены между собой.
АВП характеризуется тем, что стенки воздуховода ограждения выполнены в виде жесткого короба.
При этом пневматическая связь объединенных, по меньшей мере, в одной секции полостей смежных конусных элементов выполнена в виде дополнительного воздуховода, образованного между конусными элементами и перфорированной мембраной, закрепленной между боковыми стенками воздуховодом.
АВП характеризуется тем, что он оснащен двумя воздушными движителями, а для компенсации возмущения по крену сигнал с вычислителя поступает на приводы аэродинамических горизонтальных рулей, отклоняющих их в противоположные стороны.
АВП характеризуется тем, что каждый конусный элемент оснащен расположенными внутри своей полости двумя перфорированными диафрагмами, выполненными смыкающимися друг с другом выше нижних кромок конусного элемента, при этом одна диафрагма простирается от нижней наружной кромки конусного элемента, а другая - от нижней внутренней кромки конусного элемента.
Группа изобретений поясняется чертежами.
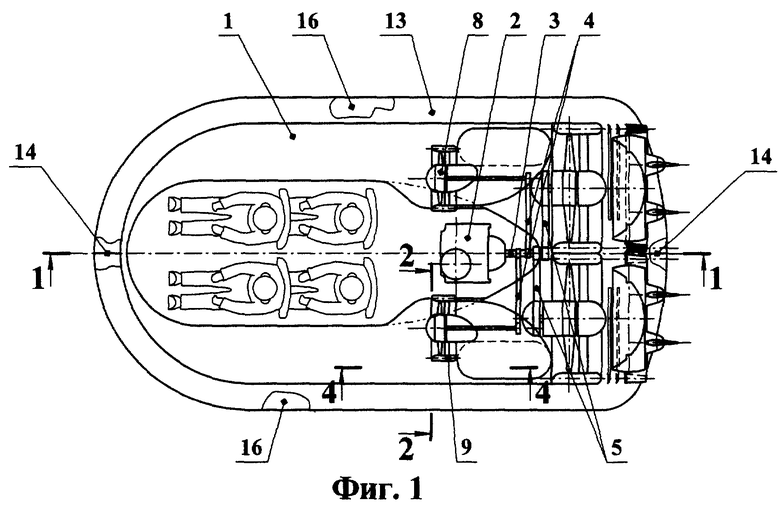
На фиг.1 представлен АВП при виде в плане.
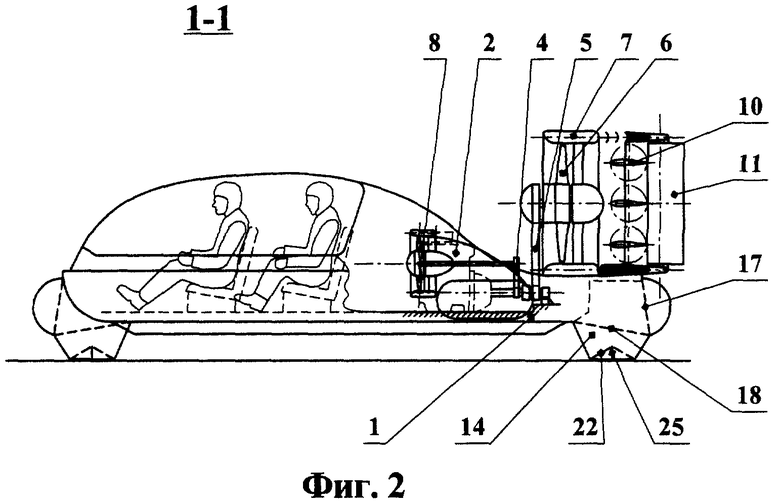
На фиг.2 показан АВП в разрезе 1-1 на фиг.1.
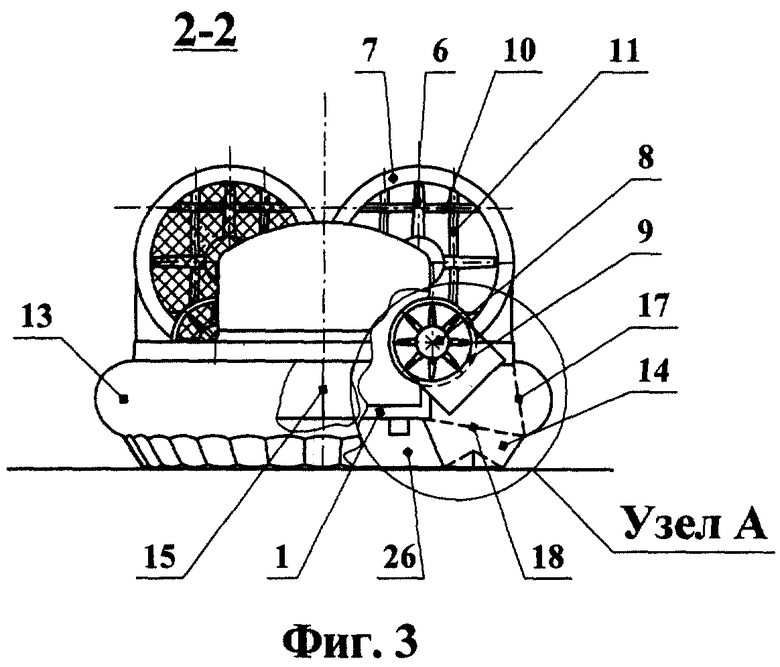
На фиг.3 показан АВП в разрез 2-2 на фиг.1.
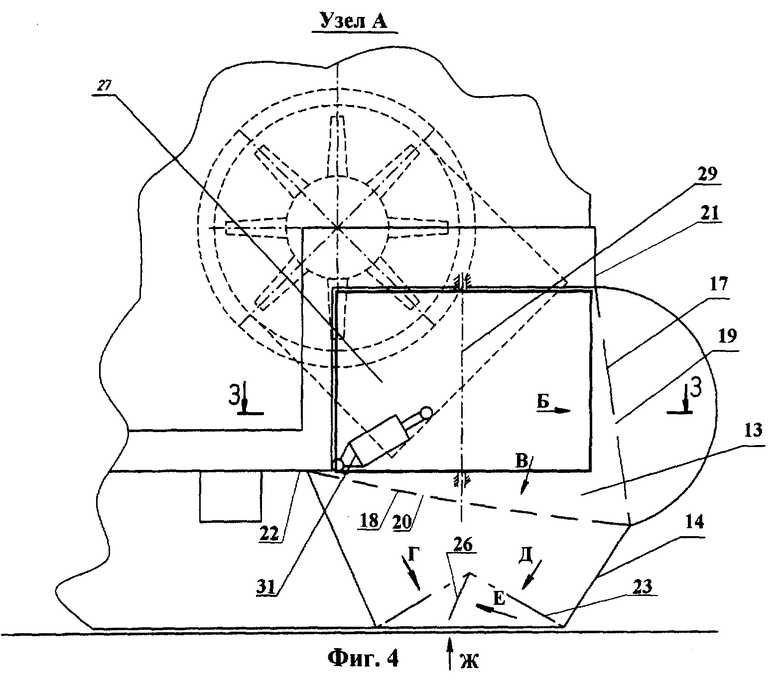
На фиг.4 приведен узел А на фиг.3 по 1-му варианту выполнения АВП.
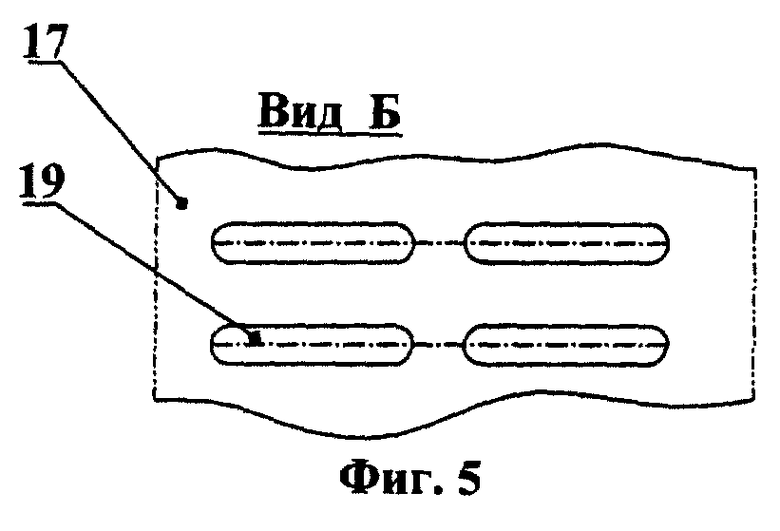
На фиг.5 показан вид Б на фиг.4.
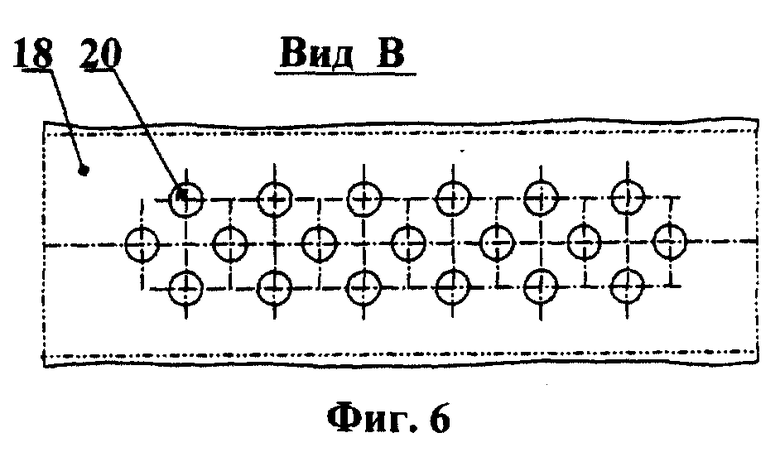
На фиг.6 показан вид В на фиг.4.
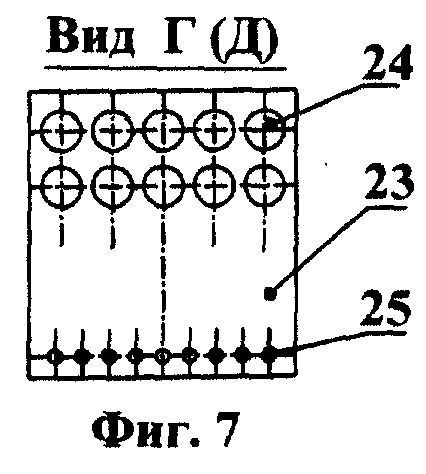
На фиг.7 показан вид Г и Д на фиг.4.
На фиг.8 дан вид Е на фиг.4.
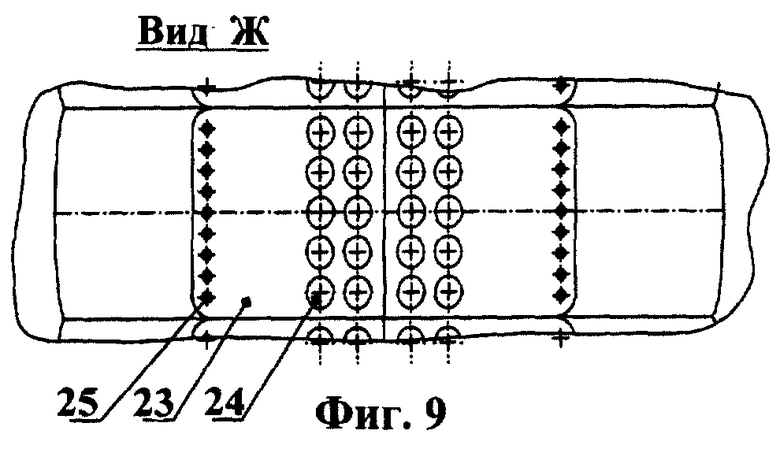
На фиг.9 дан вид Ж на фиг.4.
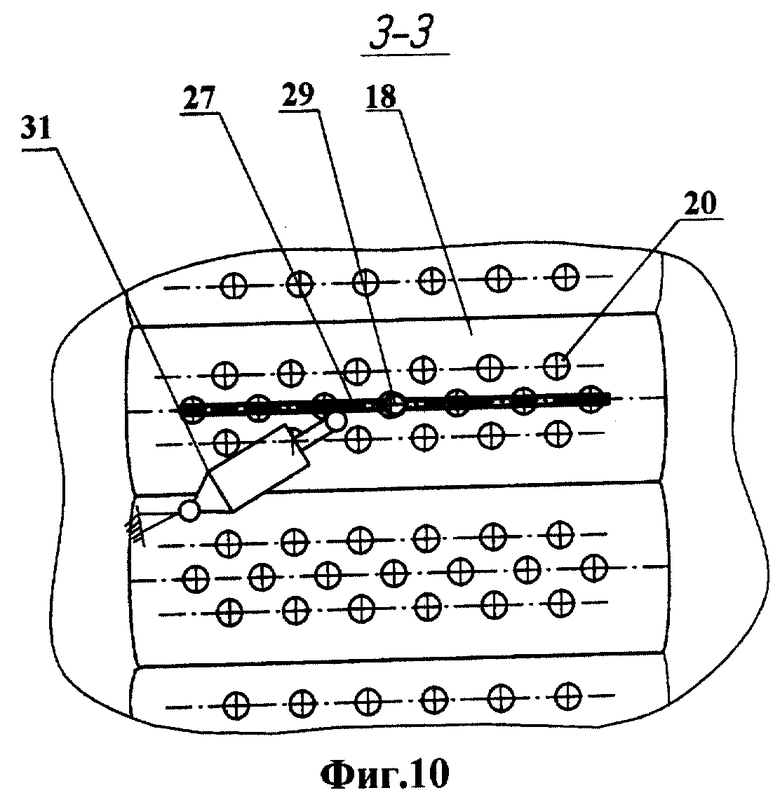
На фиг.10 дан разрез 3-3 на фиг.4.
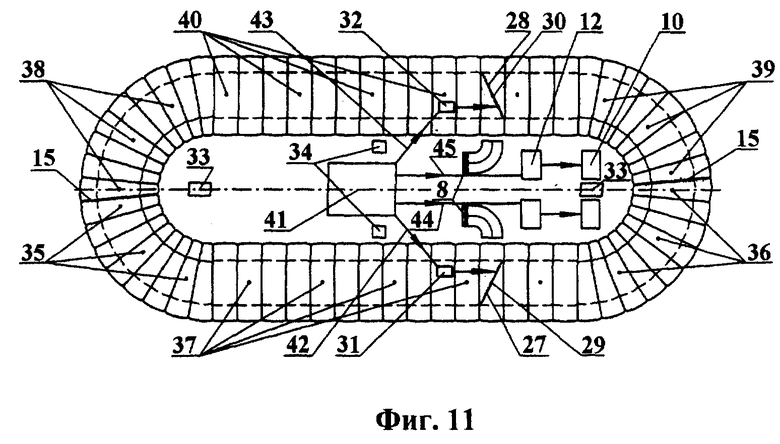
На фиг.11 приведена схема расположение датчиков системы управления АВП.
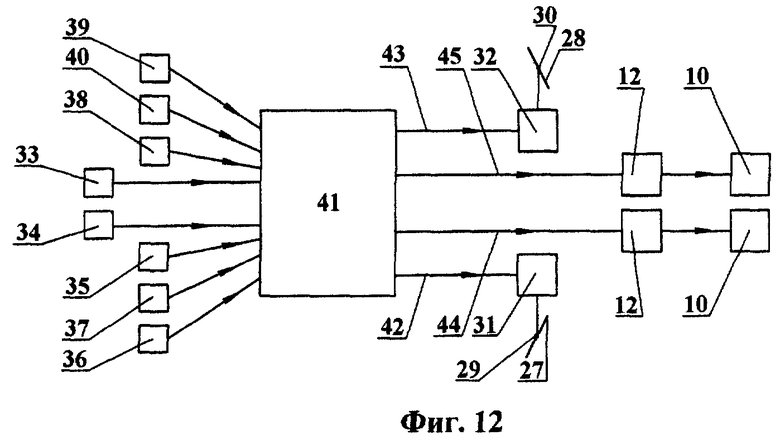
На фиг.12 дана блок-схема системы стабилизации АВП.
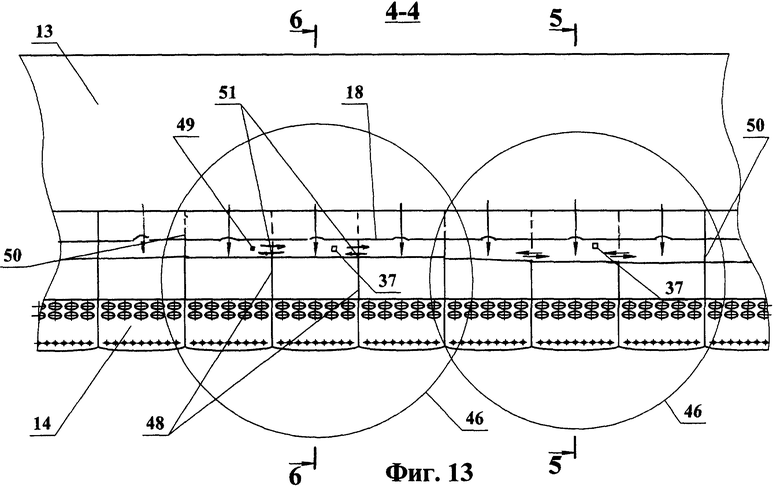
На фиг.13 показан разрез 4-4 на фиг.1 при выполнении АВП по 2-му варианту с гибким воздуховодом.
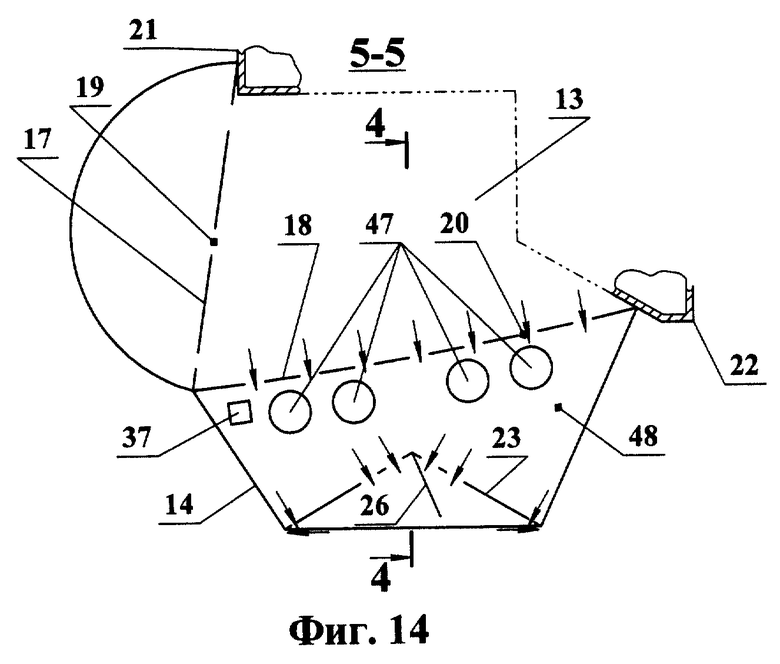
На фиг.14 показано сечение 5-5 на фиг.13 при пневматической связи между смежными конусными элементами в виде отверстий.
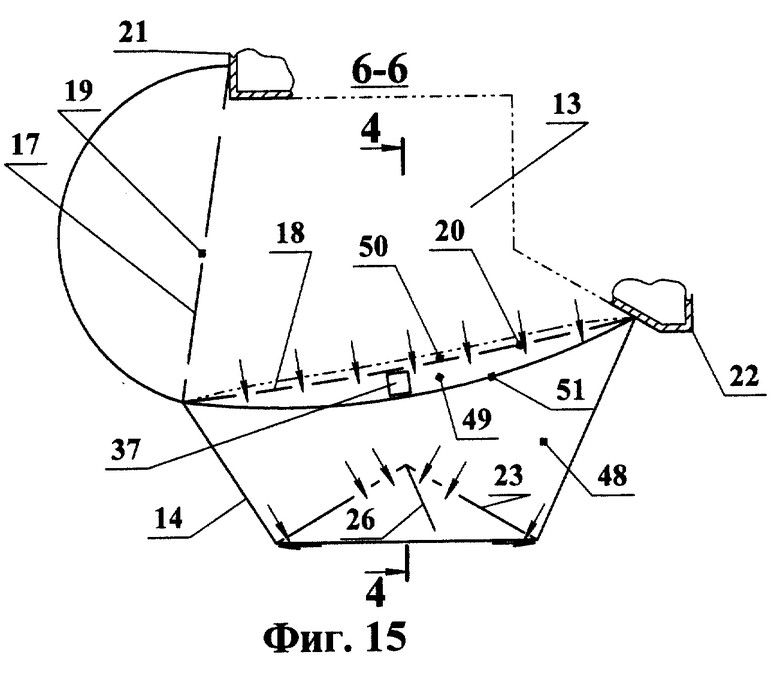
На фиг.15 показано сечение 6-6 на фиг.13 при пневматической связи между смежными конусными элементами в виде канала.
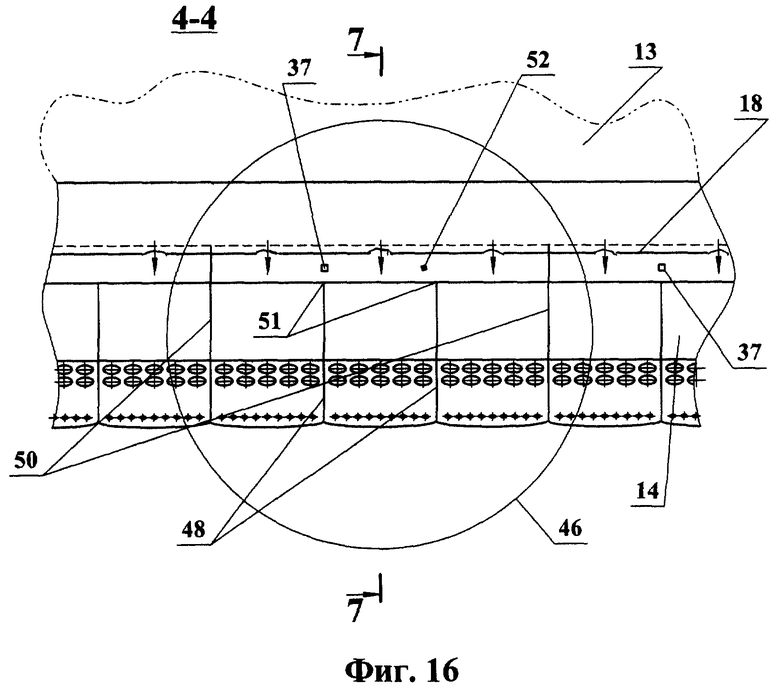
На фиг.16 показан разрез 4-4 на фиг.1 при выполнении АВП по 2-му варианту с жестким воздуховодом.
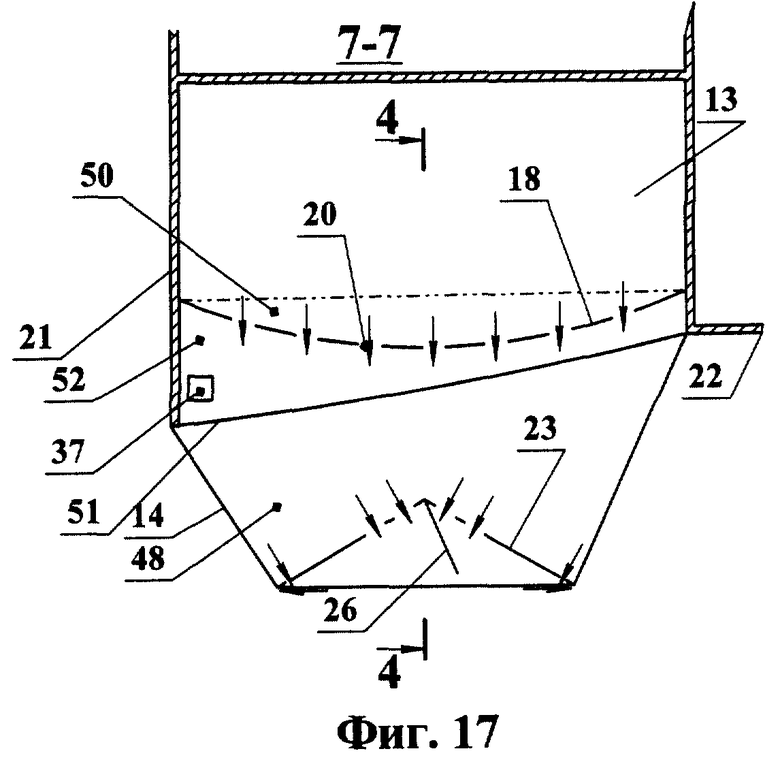
На фиг.17 показано сечение 7-7 на фиг.16.
Раскрытие вариантов изобретений.
Аппарат на воздушной подушке (АВП) содержит, как показано на фиг.1, 2 и 3, корпус 1, силовую установку, содержащую, по меньшей мере, один двигатель 2 и трансмиссию, обеспечивающую кинематическую связь выходного вала 3 двигателя 2, по меньшей мере, с одним воздушным движителем для создания тяги АВП и, по меньшей мере, с одним нагнетателем для создания воздушной подушки. Трансмиссия содержит редукторы, выполненные, например, в виде ременных передач 4 и 5 между выходным валом 3 двигателя 2 и соответственно осями воздушных движителей и осями нагнетателей. Воздушный движитель для создания тяги может выполняться в виде воздушного винта 6, в том числе в кольце 7 (с образованием винто-кольцевого движителя - ВКД), вентилятора и т.п. Нагнетатели могут выполняться в виде центробежных (радиальных), диаметральных и осевых вентиляторов.
В предпочтительном варианте выполнения АВП имеются два воздушных движителя, выполненных в виде ВКД, нагнетатели выполнены в виде двух осевых вентиляторов 8 с входными патрубками 9, обращенными в сторону носа АВП, например, при расположении оси вращения вентиляторов 8 в плоскости, параллельной оси симметрии АВП. Винты 6 выполнены с лопастями изменяемого шага, за кольцами 7 ВКД установлены горизонтальные 10 и вертикальные 11 аэродинамические рули для балансировки АВП по тангажу (дифференту) и управления по курсу. Рули 11 оснащены приводом 12 их отклонения, выполненным, например, в виде гидроцилиндров или электромеханизмов, сблокированных с тягами ручного управления от штурвала (на фиг. не показано). Рули 11 отклоняются посредством тяг управления с педалей АВП (на фиг. не показано). По периметру корпуса 1 АВП прикреплено ограждение воздушной подушки, выполненное в виде воздуховодов 13 и гибкого ограждения, выполненного в виде соединенных с воздуховодом 13 легкосъемных конусных элементов 14. Конусные элементы 14 выполнены сплющенными и соприкасающимися друг с другом плоскими боковыми поверхностями. При этом образованное воздуховодами 13 ограждение разделено мембранами 15, по меньшей мере, на две изолированные друг от друга полости 16, каждая из которых соединена с соответствующим нагнетателем, например с осевым вентилятором 8.
Воздуховоды 13 могут выполняться в виде жесткого короба (фиг.16, 17) или с внешней стенкой из гибкого материала, закрепленной в верхней части по периметру корпуса 1, а в нижней части - с конусными элементами 14 посредством разъемного соединения, выполненного, например, в виде шнуровки (на фиг. не показано). При выполнении внешней стенки воздуховода 13 из гибкого материала воздуховод 13 оснащен мембранами 17 и 18 с перфорацией соответственно 19 и 20 (фиг.4, 5, 6). Мембраны 17 закреплены по контуру соединения ограждения с бортом 21 корпуса 1 и по контуру соединения ограждения с конусными элементами 14. Мембраны 18 закреплены по контуру соединения ограждения с днищем 22 корпуса 1 и по контуру соединения ограждения с конусными элементами 13.
При выполнении АВП по 1-му варианту, а также в предпочтительном варианте выполнения АВП по 2-му варианту каждый из конусных элементов 14 гибкого ограждения АВП (фиг.4...9) имеет большую по величине площадь горизонтального сечения со стороны корпуса 1, чем площадь горизонтального сечения со стороны опорной поверхности, а со стороны нижнего основания оснащен двумя диафрагмами 23 с перфорацией 24 и 25 в верхней и нижней частях диафрагм 23 (фиг.7). Диафрагмы 23 выполнены смыкающимися друг с другом под углом 100...120° (фиг.4) выше нижних кромок конусного элемента 14. К месту стыка диафрагм 23 крепится гибкий фартук 26 (фиг.4, 8), длина которого практически совпадает с высотой треугольника, образованного диафрагмами 23 и нижними боковыми кромками конусного элемента 14 (фиг.4). Диафрагмы 23 делят полость конусного элемента 14 на верхнюю и нижнюю части, величина давления внутри которых во время движения на расчетных режимах разная. Для поддержания достаточной гибкости конусного элемента 14 и поддержания его формы при прохождении препятствий и сохранения формы под действием скоростного напора даже при падении избыточного давления в воздушной подушке до нуля, возможного при колебаниях АВП по высоте и тангажу в процессе движения по неровной поверхности, соотношение площади перфорации 20 в мембране 18 и площади перфорации 24 и 25 в диафрагмах 23 должно составлять 0,8...1,0.
Для улучшения характеристик устойчивости движения и управления по тангажу и крену АВП оснащен системой автоматического управления колебаниями. Система автоматического управления колебаниями содержит управляемые аэродинамически сбалансированные заслонки 27 и 28, установленные в полостях 16 воздуховода 13, поворачиваемые соответственно вокруг оси 29 и 30 посредством привода 31 и 32 (фиг.4, 10, 11), а также по команде с поста управления, например, посредством жесткой или тросовой проводки от штурвала (на фиг. не показано). В воздуховоде 13, расположенном вдоль левого (правого) борта, установлены заслонки 27 (28), поворачиваемые вокруг оси 29 (30) приводом 31 (32) (фиг.11). Заслонки 27, 28 могут устанавливаться в месте примыкания выходного канала нагнетателя к воздуховоду 13 АВП (на фиг. не показано) либо непосредственно в воздуховоде 13 (фиг.4). В носовой и/или кормовой части корпуса 1 АВП установлены датчики 33 углов тангажа, угловой скорости и/или углового ускорения тангажа, на борту в районе центра масс АВП - датчики 34 углов крена, угловой скорости и/или углового ускорения крена (фиг.11). Сигналы с датчиков 33...40 поступают в вычислитель 41. С вычислителя 41 сигналы поступают по связи 42 на привод 31 заслонки 27 левого борта, по связи 43 - на привод 32 заслонки 30 правого борта, по связям 44 и 45 - на приводы 12 отклонения горизонтальных аэродинамических рулей 10, расположенных в струе за воздушным движителем на левом и правом бортах (фиг.11, 12).
По 1-му варианту выполнения АВП датчики давления 33...40 установлены в полости конусных элементов 14 (не чаще, чем в полости каждого третьего конусного элемента 14). При этом в конусных элементах 14, расположенных в носовой и кормовой частях АВП, датчики 33...40 устанавливаются чаще, чем в конусных элементах 14, расположенных по бортам АВП. Вдоль левого борта в носовой, кормовой и боковой частях АВП установлены датчики давления соответственно 35, 36, 37, а по правому борту - датчики давления 38, 39, 40 размещены соответственно в носовой, кормовой и боковой частях АВП. Сигналы с датчиков 33...40 поступают в вычислитель 41. С вычислителя 41 сигналы поступают по связи 42 на привод 31 заслонки 27 левого борта, по связи 43 - на привод 32 заслонки 28 правого борта, по связям 44 и 45 - на приводы 12 отклонения горизонтальных аэродинамических рулей 10, расположенных в струе за воздушным движителем на левом и правом бортах (фиг.11, 12).
По 2-му варианту выполнения АВП некоторые или все конусные элементы 14 гибкого ограждения объединены в секции 46, каждая из которых содержит, по меньшей мере, два смежных конусных элемента 14, пневматически связанных между собой. При этом пневматическая связь может выполняться либо в виде отверстий 47 в верхней части смежных боковых стенок 48 конусных элементов 14 (фиг.13, 14), либо в виде канала 49 между мембраной 18 и верхними кромками 51 смежных боковых стенок 48 конусных элементов 14 за счет уменьшения высоты смежных боковых стенок 48 в их средней части по сравнению с крайними стенками 50 секции 46 элементов (фиг.13, 15). Верхние кромки 51 смежных боковых стенок 48 могут быть скреплены между собой, например, посредством шнуровки (на фиг. не показано).
При выполнении стенок воздуховода 13 в виде жесткого короба конусные элементы 14 соединены с жесткими стенками воздуховода 13, а диафрагма 18 (которая может выполняться в виде жесткого листа с перфорацией 20) расположена выше контура крепления стенок воздуховода 13 с конусными элементами 14 (фиг.16, 17). При этом между крайними боковыми стенками 50 секции 46, диафрагмой 18 и контуром крепления конусных элементов 14 образуется дополнительный воздуховод 52, который пневматически соединяется с воздуховодом 13 посредством перфорации 20 в диафрагме 18. Дополнительный воздуховод 52 может выполняться в виде соединения нескольких (двух и более) смежных конусных элементов 14 в общую секцию 46, внутри которой конусные элементы 14 могут соединяться между собой по верхним кромкам 51 боковых стенок 48, а с воздуховодом 52 по внешнему контуру боковых сторон 48 и 50. В торцах секции 46 крайние боковые стенки 50 имеют большую высоту, чем боковые стенки 48 в средней части секции 46.
В каждой секции 46 в полостях либо дополнительного воздуховода 52, либо в нескольких конусных элементах 14, пневматически связанных между собой посредством отверстий 47 в их боковых стенках, либо в канале 49 устанавливаются датчики давления 35, 36, 37 и 38, 39, 40.
АВП, оснащенный системой автоматического управления колебаниями, функционирует следующим образом.
Крутящий момент от вала 3 двигателя 2 посредством трансмиссии, выполненной, например, с редукторами с ременными передачами 4 и 5, передается на воздушные движители и нагнетатели, например, на оси воздушных винтов 6 и оси осевых вентиляторов 8. Вентиляторами 8 воздух нагнетается в полости 16 воздуховодов 13 ограждения, изолированные друг от друга мембранами 15. Из полости 16 воздуховодов 13 ограждения воздух через перфорацию (отверстия) 20 в мембранах 18 и перфорацию (отверстия) 24 и 25 в диафрагмах 23 выходит в полости воздушной подушки под конусными элементами 14, ограниченные диафрагмами 23 и опорной поверхностью, создавая в этих полостях избыточное давление. Далее воздух через зазор между нижними наружными кромками конусных элементов 14 вытекает наружу, а под нижними внутренними кромками попадает под днище 22 (фиг.9) корпуса 1, создавая там равномерно распределенное избыточное давление.
При касании поверхности или наезде на препятствие в воздуховоде 13 ограждения, разделенном мембранами 15 на полости 16 и соединенном с конусными элементами 14, у накрененного борта в результате уменьшения зазора между элементами ограждения и опорной поверхностью давление повышается, а у противоположного борта в связи с увеличением этого зазора давление понижается. Мембраны 15 предотвращают перетекание воздуха из одной полости 16 в другую и, следовательно, не допускают выравнивания давления в полостях 16. При этом возникает восстанавливающий момент сил, который обеспечивает поперечную статическую устойчивость.
При увеличении угла тангажа внутри касающихся опорной поверхности кормовых конусных элементов 14 и в их полостях под диафрагмами 23 давление повышается вплоть до уровня давления в воздуховоде 13, а давление в носовых конусных элементах 14 в связи с увеличением зазора между конусными элементами 14 и опорной поверхностью падает. Этим обеспечивается продольная статическая устойчивость.
При выполнении внешней стенки воздуховода 13 из гибкого материала, закрепляемого по периметру корпуса 1 на борту 21 корпуса 1 и соединенного с конусными элементами 14 посредством быстросъемного соединения, например шнуровки (на фиг. не обозначена), наличие перфорированной диафрагмы 17, соединяющей места крепления внешней гибкой стенки воздуховода 13 с бортом 21 корпуса 1 и конусными элементами 14, обеспечивает создание заданной формы гибкого ограждения и предотвращает развитие автоколебаний АВП и вибрации гибкого ограждения.
Тяга АВП создается, по меньшей мере, одним воздушным движителем, например воздушным винтом 6. Использование винтов 6 с изменяемым шагом при установке на АВП двух винтов 6 позволяет создавать управляющий момент сил по курсу. Установленные за винтами 6 в кольцах 7 горизонтальные 10 и вертикальные 11 аэродинамические рули обеспечивают при их отклонении создание управляющего момента для балансировки АВП по тангажу при изменении положения центра давления воздушной подушки относительно центра масс АВП и управление АВП по курсу.
В случае выполнения АВП по 2-му варианту с пневматической связью между соседними конусными элементами 14 в виде отверстий 47 или канала 49 в боковых стенках 48, объединенных в секцию 46 смежных конусных элементов 14 (фиг.13, 14, 15), или дополнительного воздуховода 52 с секциями 46 (фиг.16, 17) при приближении конусных элементов 14 к опорной поверхности давление в полостях секций 46 повышается вплоть до уровня давления в воздуховоде 13, а давление в полости удаляющихся от опорной поверхности секций 46 падает. При этом давление в полости секции 46 приближается к средней величине давления в полостях конусных элементов 14, входящих в секцию 46, что предотвращает развитие автоколебаний. Это создает восстанавливающий момент и обеспечивает статическую устойчивость АВП.
При соотношении площади перфорации 24 и 25 в диафрагмах 23 к площади перфорации 20 в мембране 18 равном 0,8...1,0 перепад давления в полостях 16 воздуховода 13 и в конусных элементах 14 на расчетных режимах движения АВП составляет от 1,1 до 1,2, что достаточно для обеспечения требуемой для АВП поперечной и продольной устойчивости.
Гибкое ограждение, выполненное в виде конусных элементов 14, соединенных с полостями 16 воздуховодов 13, при подаче в него воздуха, проходящего через перфорацию 20 мембраны 18, наполняется воздухом. Выходящий через отверстия 24 и 25 воздух вытекает наружу через зазор между нижними внешними кромками конусных элементов 14 и опорной поверхностью, создавая избыточное давление под конусными элементами 14 и в полости воздушной подушки под днищем 22 корпуса 1. При крене АВП воздух из отверстий 24, 25 частично попадает через зазор под нижней внутренней кромкой конусного элемента 14 и опорной поверхностью в полость воздушной подушки. При движении в случае наезда на препятствие (фиг.10) гибкий фартук 26 перекрывает отверстия 24 и 25, чем предохраняет их от повреждения.
Наличие отверстий 25 в нижней части диафрагмы 23 обеспечивает сток воды, а также механической взвеси, захватываемой вентиляторами 8 во время старта и движения. Выполнение конусных элементов 14 легкосъемными обеспечивает удобство быстрой замены поврежденных элементов, а также очистку от грязи и мусора полостей между боковыми стенками конусных элементов 14 и диафрагмами 23.
Система автоматического управления колебаниями АВП работает следующим образом.
При изменении угла тангажа в изолированном продольном возмущенном движении, например при приближении носовой части корпуса 1 к неровности опорной поверхности, в конусных элементах 14, расположенных в носовой части, давление повышается, а в конусных элементах 14, расположенных в кормовой части АВП, давление уменьшается, что фиксируется датчиками давления 35, 38 и 36, 39, установленными в полости конусных элементов 14 и секциях 46 с левой и с правой стороны от делительной поверхности АВП (от вертикальной плоскости, проходящей через продольную ось АВП) соответственно в носовой и кормовой части корпуса 1. Подаваемый с датчиков 35, 38 и 36, 39 сигнал направляется в вычислитель 41. Вычислитель 41 сравнивает величину сигналов с датчиков давления 35, 38 и 36, 39 и выдает управляющий сигнал по связи 42 и 43 соответственно на приводы 31, 32, посредством которых заслонки 27, 28 поворачиваются вокруг осей 29, 30 на соответствующий угол, например, пропорциональный величине рассогласования сигналов датчиков 35, 38 и 36, 39, в сторону, обеспечивающую увеличение подачи воздуха в кормовую часть и соответственно уменьшение подачи воздуха в носовую часть. В результате давление в конусных элементах 14, расположенных в кормовой части корпуса 1, повышается, а в носовой - уменьшается. Это снижает возмущающее воздействие неровности по моменту тангажа от воздушной подушки, и тем самым способствует уменьшению угловых колебаний АВП при движении по неровной опорной поверхности. В случае если изменение давления в конусных элементах 14 приводит к достижению определенной (пороговой) величины угла, угловой скорости и/или ускорения сигнал с датчиков углов, угловой скорости и/или углового ускорения 33 подается в вычислитель, который формирует управляющий сигнал на привод 12, отклоняющий горизонтальные аэродинамические рули 10 в сторону, обеспечивающую уменьшение угловой скорости АВП. В результате уменьшается амплитуда угловых колебаний и снижаются перегрузки от возмущающего воздействия на АВП неровностей пути.
При изменении угла крена в изолированном боковом возмущенном движении, например при наезде АВП на неровность левым бортом, конусные элементы 14, соединенные с расположенной вдоль левого борта изолированной полостью 16 воздуховода 13, разделенного мембранами 15, например, на четыре изолированные полости (на фиг. не показано), приближаются к опорной поверхности, давление в них повышается, а в конусных элементах 14, соединенных с расположенной вдоль правого борта изолированной полостью 16 воздуховода 13, давление уменьшается, что фиксируется датчиками давления 37 и 40, установленными в полости конусных элементов 14 с левого и с правого борта корпуса 1. Подаваемый с датчиков 37, 40 и с датчиков 34 углов, угловой скорости и/или углового ускорения крена сигнал направляется в вычислитель 41. Вычислитель сравнивает величину сигналов с датчиков 37, 40, 34 и по связи 44, 45 выдает управляющий сигнал на привод 12, отклоняющий горизонтальные аэродинамические рули 10 в противоположные стороны, обеспечивающие парирование момента от воздушной подушки в результате наезда на неровность. Тем самым уменьшается угловое отклонение АВП от воздействия неровностей и создание восстанавливающего момента.
Объединение нескольких смежных конусных элементов 14 в секции 46 (по 2-му варианту) и выполнение пневматической связи между конусными элементами 14 в виде отверстий 47, канала 49 или дополнительного воздуховода 52 приводит к снижению разброса показаний датчиков давления, что в целом увеличивает эффективность системы стабилизации, работающей на уменьшении реакции АВП на возмущения от неровностей поверхности.
При возмущенном пространственном движении АВП по неровной поверхности сигналы с датчиков 35...40 давления и датчиков 33, 34 углов, угловых скоростей и/или ускорения поступают в вычислитель 41, который определяет величины рассогласования показаний датчиков давления 35...40, а также величину превышения пороговых величин углов, и/или угловых скоростей, и/или ускорений, и по связям 42, 43 выдает управляющие сигналы на приводы 31, 32 отклонения заслонок 27, 28, а по связям 44, 45 - на приводы 12 отклонения аэродинамических горизонтальных рулей 10. При этом уменьшаются возмущающие моменты от воздушной подушки при наезде АВП на неровности, что уменьшает амплитуду угловых колебаний и уменьшает перегрузки от возмущающего воздействия на АВП неровностей пути.
Для управления по тангажу при разгоне АВП на водной поверхности, что необходимо делать для снижения сопротивления движению на горбе сопротивления, с поста управления посредством жесткой или тросовой проводки (на фиг. не показано) либо посредством приводов 31, 32 отклоняются заслонки 27, 28, обеспечивая увеличения подачи воздуха в носовую или кормовую части воздуховодов 13. При этом центр давления воздушной подушки смещается вперед (назад), что создает кабрирующий (пикирующий) момент относительно центра масс АВП и создается оптимальная центровка по тангажу из условия минимизации сопротивления движению как на горбе сопротивления, так и при движении на крейсерской скорости. Для управления по крену заслонки 27 и 28 следует отклонять на разные углы, создавая управляющий момент сил по крену.
Представленное описание достаточно для разработки конструкции АВП и реализации группы изобретений на специализированных предприятиях.
ПЕРЕЧЕНЬ ПОЗИЦИЙ К ЧЕРТЕЖАМ ГРУППЫ ИЗОБРЕТЕНИЙ “АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ (ВАРИАНТЫ)”
1 - корпус;
2 - двигатель;
3 - выходной вал двигателя 2;
4 - ременная передача между выходным валом 3 двигателя 2 и воздушными движителями;
5 - ременная передача между выходным валом 3 двигателя 2 и нагнетателями;
6 - воздушные винты;
7 - кольца воздушных винтов (ВКД);
8 - осевой вентилятор;
9 - входной патрубок осевого вентилятора 8, обращенный в сторону носа АВП;
10 - горизонтальные аэродинамические рули;
11 - вертикальные аэродинамические рули;
12 - привод горизонтальных аэродинамических рулей
13 - воздуховод, расположенный вдоль периметра корпуса 1;
14 - конусные элементы ограждения;
15 - мембраны, делящие баллонное ограждение;
16 - полости баллонного ограждения;
17 - перфорированная мембрана, закрепленная в месте соединения внешней стенки из гибкого материала воздуховода 12 с корпусом 1;
18 - перфорированная мембрана, закрепленная соединения воздуховода 13 с конусными элементами 14;
19 - перфорация в мембране 17;
20 - перфорация в мембране 18;
21 - борт корпуса 1 АВП;
22 - днище корпуса 1 АВП;
23 - диафрагма внутри конусного элемента 14;
24 - перфорация в верхней части диафрагмы 23;
25 - перфорация в нижней части диафрагмы 23;
26 - гибкий фартук;
27 - управляемая заслонка воздуховода левого борта;
28 - управляемая заслонка воздуховода правого борта;
29 - ось поворота заслонки 27 воздуховода левого борта;
30 - ось поворота заслонки 28 воздуховода правого борта;
31 - привод заслонки 27 воздуховода левого борта;
32 - привод заслонки 28 воздуховода правого борта;
33 - датчики углов тангажа, угловой скорости и углового ускорения тангажа;
34 - датчики углов крена, угловой скорости и углового ускорения крена;
35 - датчики давления носовой части АВП левого борта;
36 - датчики давления кормовой части АВП левого борта;
37 - датчики давления левого борта;
38 - датчики давления носовой части АВП правого борта;
39 - датчики давления кормовой части АВП правого борта;
40 - датчики давления правого борта;
41 - вычислитель;
42 - связь вычислителя 41 с приводом 31 заслонки 27 левого борта;
43 - связь вычислителя 41с приводом 32 заслонки 28 правого борта;
44 - связь вычислителя 41 с приводом 12 горизонтальных аэродинамических рулей 10 левого борта;
45 - связь вычислителя 41 с приводом 12 горизонтальных аэродинамических рулей 10 правого борта.
46 - секция ограждения, образованная пневматически соединенными между собой конусными элементами;
47 - отверстия в верхней части боковых стенок конусных элементов 14;
48 - смежные боковые стенки конусных элементов 14, объединенных в секцию 46;
49 - канал между смежными конусными элементами 14;
50 - крайние боковые стенки секции 46 конусных элементов 14;
51 - верхние кромки смежных боковых стенок 48;
52 - дополнительный воздуховод.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2004 |
|
RU2256570C1 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ И ГИБКОЕ ОГРАЖДЕНИЕ ДЛЯ НЕГО | 2003 |
|
RU2256568C1 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2003 |
|
RU2256567C1 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2013 |
|
RU2574649C2 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2013 |
|
RU2527640C1 |
| Аппарат на воздушной подушке с наземным движителем | 2015 |
|
RU2614459C1 |
| САМОЛЕТ С ШАССИ НА ВОЗДУШНОЙ ПОДУШКЕ | 2015 |
|
RU2603808C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО НА ВОЗДУШНОЙ ПОДУШКЕ | 2006 |
|
RU2323112C2 |
| АМФИБИЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО НА ВОЗДУШНОЙ ПОДУШКЕ | 2004 |
|
RU2269441C1 |
| АМФИБИЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО НА ВОЗДУШНОЙ ПОДУШКЕ | 2023 |
|
RU2822072C1 |
Изобретение относится к транспорту и касается создания аппаратов на воздушной подушке с системой автоматического управления колебаниями по углам крена и дифферента. Аппарат на воздушной подушке имеет корпус, ограждение воздушной подушки, содержащее расположенный по периметру корпуса воздуховод, соединенный с конусными элементами, двигатель, воздушный движитель и нагнетатели-вентиляторы. Воздуховод ограждения воздушной подушки разделен мембранами на полости, каждая из которых соединена с соответствующим вентилятором и оснащена заслонкой, отклоняемой приводом. В полости ряда конусных элементов размещены датчики давления. Соединение соседних конусных элементов пневматической связью в виде отверстий в боковых стенках, канала или дополнительного воздуховода уменьшает разброс показаний датчиков давления, что повышает эффективность стабилизации. На корпусе аппарата на воздушной подушке установлены датчики углов, угловых скоростей и/или ускорений по тангажу и крену. Сигналы с датчиков подаются в вычислитель, который выдает управляющий сигнал на приводы поворота заслонок и на приводы отклонения аэродинамических горизонтальных рулей, создающих восстанавливающие моменты. Технический результат реализации изобретения заключается в уменьшении амплитуд угловых перемещений и перегрузок аппарата на воздушной подушке от возмущающего воздействия неровностей пути. 2 н.п. ф-лы, 14 з.п. ф-лы, 17 ил.
| US 5454440 А, 03.10.1995 | |||
| US 4029036 А, 14.06.1977 | |||
| US 3850126 А, 26.11.1974 | |||
| Судно с движением на воздушной подушке | 1960 |
|
SU136636A1 |

