Изобретение относится к машиностроению, в частности к самобалансирующимся роторным механизмам с вертикальной осью вращения ротора и газостатическим опорным узлом, и может найти применение в различных отраслях машиностроения: дробилки и мельницы с роторным рабочим органом, центрифуги и сепараторы различного назначения, центробежные испытательные стенды, турбины, электрогенераторы, двигатели, станки и другие роторные установки с преимущественно высокоскоростным рабочим органом для осуществления технологических процессов, вызывающих значительную динамическую неуравновешенность ротора.
Известен вертикальный роторный механизм с газостатической опорой (Роторный механизм центробежной установки), содержащий рабочий орган, газостатический опорный узел с соответствующими друг другу по форме несущими поверхностями (в виде части сферы), пята которого непосредственно и жестко соединена с рабочим органом, образуя ротор, а подпятник которого имеет отверстие для подвода газообразного рабочего тела к несущим поверхностям, систему газообеспечения, связанную с центральным отверстием подпятника, и привод с гибкой механической передачей, состоящей из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим (Патент РФ №2183136, В 02 С 13/14, опубл. 10.06.02).
Однако данная роторная установка обладает недостаточно высокой надежностью, т. к. при возникновении режимного дисбаланса в рабочем органе и при резонансных частотах вращения возникают значительные радиально-угловые колебания ротора, которые при осуществлении технологических процессов на высоких скоростях вращения могут привести к ударам и трению пяты о подпятник и выходу газостатического опорного узла из строя. Эти недостатки связаны со слабой радиальной и угловой устойчивостью ротора, вызванной отсутствием радиальной опоры, и невозможностью обеспечить самобалансировку ротора из-за жесткого соединения рабочего органа и пяты.
Известна также центробежная установка, содержащая корпус и вертикальный роторный механизм с газостатической опорой, состоящий из рабочего органа, газостатического опорного узла с соответствующими друг другу по форме несущими поверхностями (в виде части сферы), пята которого жестко соединена с рабочим органом посредством вала, образуя ротор, а подпятник которого имеет отверстие для подвода газообразного рабочего тела к несущим поверхностям, систему газообеспечения, связанную с отверстием подпятника, и привод с гибкой механической передачей, состоящей из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим, при этом установка содержит механический опорный узел, состоящий из подшипникового узла, установленного на валу, соединяющего рабочий орган и пяту, и упругого опорного узла, соединяющего подшипниковый узел и корпус (Заявка на патент РБ № а 20010810, В 04 В 3/00, опубл. 30.03.03. Официальный бюл. №1, 2003 г.).
Однако данная роторная установка обладает недостаточно высокой надежностью работы, т.к. при режимном дисбалансе рабочего органа и резонансных частотах вращения возникает неуравновешенность ротора, обусловливающая высокоамплитудные колебания ротора и соответственно высокие переменные динамические нагрузки в радиальном и угловом направлениях на подшипниковый узел и упругий опорный узел и их достаточно быстрый выход из строя. Эти недостатки связаны с тем, что из-за жесткого соединения рабочего органа и пяты невозможно обеспечить достижение технического результата, заключающегося в обеспечении самобалансировки рабочего органа и пяты независимо друг от друга и этим предотвратить радиальные и угловые колебания ротора.
Задача изобретения состоит в значительном повышении надежности работы роторной установки за счет предотвращения радиальных и угловых колебаний ротора путем получения технического результата, заключающегося в обеспечении самобалансировки рабочего органа и пяты независимо друг от друга.
Сущность изобретения заключается в том, что для решения поставленной задачи путем достижения указанного технического результата самобалансирующийся вертикальный роторный механизм с газостатической опорой, содержащий рабочий орган, газостатический опорный узел с соответствующими друг другу по форме несущими поверхностями, пята которого объединена с рабочим органом, образуя ротор, а подпятник которого имеет отверстие для подвода газообразного рабочего тела к несущим поверхностям, систему газообеспечения, связанную с отверстием подпятника, и привод с механической передачей, состоящей из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим, отличается тем, что содержит фигурную раму, расположенную между рабочим органом и пятой и связанную с ними посредством гибких элементов, узел коррекции дисбаланса рабочего органа и узел коррекции дисбаланса пяты, каждое из которых состоит из корректирующей массы в виде кольца и гибких элементов, связывающих корректирующую массу с рабочим органом и пятой соответственно и взаимодействующих с фигурной рамой, и гибкие механические передачи для придания вращательного момента от пяты фигурной раме и от фигурной рамы рабочему органу, каждая из которых состоит из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим, причем места соединения гибких элементов узлов коррекции дисбаланса рабочего органа и пяты с рабочим органом и пятой соответственно расположены ближе к оси вращения ротора по сравнению с местами их взаимодействия с фигурным основанием.
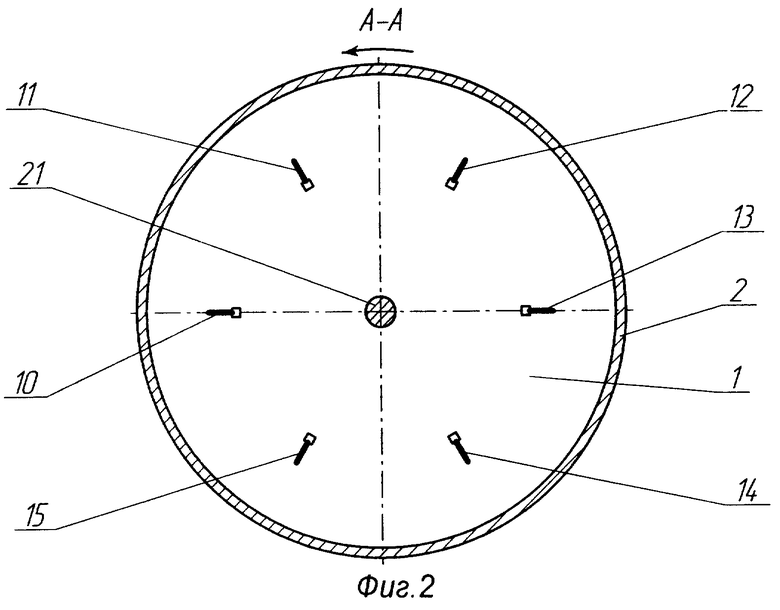
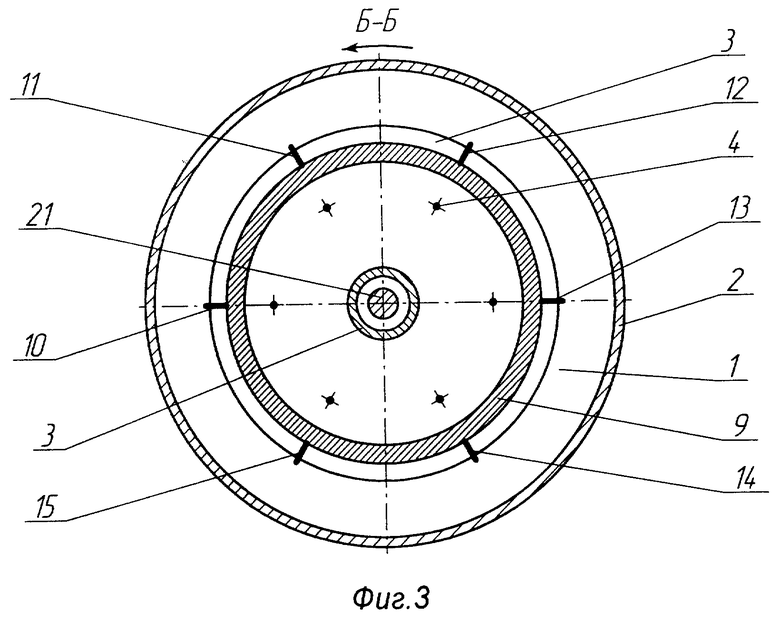
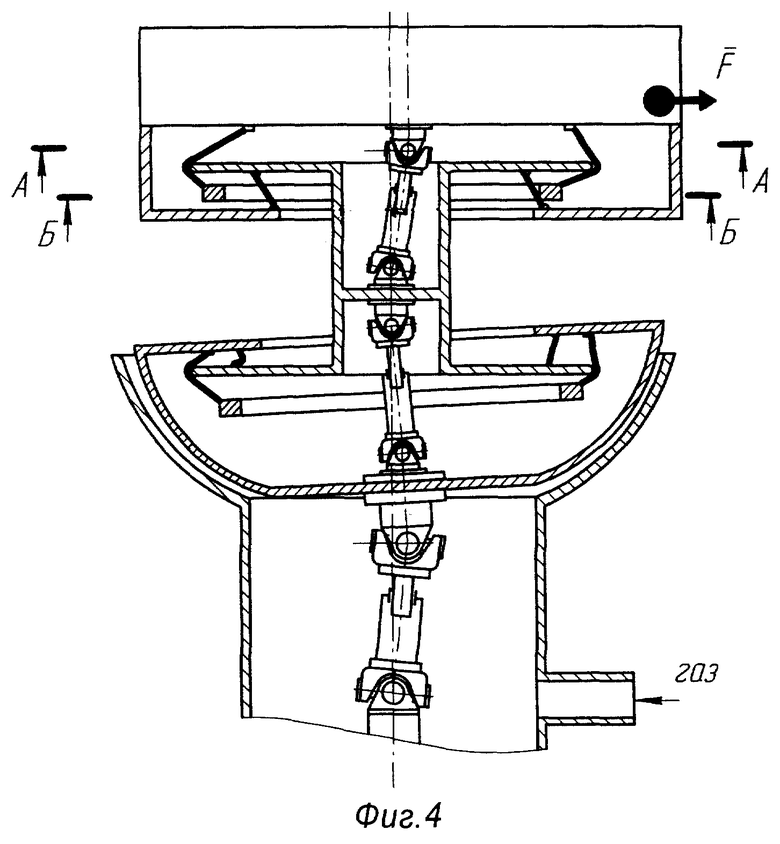
Изобретение поясняется чертежами: фиг.1 - общий вид механизма в разрезе; фиг.2 - разрез А - А на фиг.1; фиг.3 - разрез Б - Б на фиг.1; фиг.4 - общий вид механизма в разрезе с рабочим органом и пятой, находящимися в состоянии их дисбаланса.
Самобалансирующийся вертикальный роторный механизм с газостатической опорой содержит рабочий орган 1, снабженный опорным элементом 2, фигурную раму 3, связанную с опорным элементом 2 рабочего органа 1 гибкими элементами 4, газостатический опорный узел с соответствующими друг другу по форме несущими поверхностями, например, в виде части сферы, пята 5 которого связана с фигурной рамой 3 гибкими элементами 6, а подпятник 7 которого имеет отверстие 8 для подвода газообразного рабочего тела к несущим поверхностям, систему газообеспечения (на чертежах не показана), связанную с отверстием 8 подпятника 7, узел коррекции дисбаланса рабочего органа 1, состоящий из кольцеобразной корректирующей массы 9 и гибких элементов 10, 11, 12, 13, 14, 15, связывающих корректирующую массу 9 с рабочим органом 1 и взаимодействующих с фигурной рамой 3, узел коррекции дисбаланса пяты 5, состоящий из кольцеобразной корректирующей массы 16 и гибких элементов 17, 18 (остальные на чертежах не показаны), связывающих корректирующую массу 16 с пятой 5 и взаимодействующих с фигурной рамой 3, привод (на чертежах не показан) с гибкой механической передачей 19 для передачи вращательного момента пяте 5 от привода, гибкую механическую передачу 20 для передачи вращательного момента от пяты 5 фигурной раме 3 и гибкую механическую передачу 21 для передачи вращательного момента от фигурной рамы 3 рабочему органу 1.
Гибкие элементы 4 и 6 могут быть выполнены в виде тросов или цепей.
Гибкие элементы 10, 11, 12, 13, 14, 15 и 17, 18, соединяющие корректирующие массы 9 и 16 с рабочим органом 1 и пятой 5 соответственно, выполнены, например, в виде тросов. Места их соединения с рабочим органом 1 и пятой 5 расположены ближе к оси вращения ротора по сравнению с местами их взаимодействия с фигурной рамой 3.
Каждая из гибких механических передач 23, 24 и 25 состоит из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим.
Изобретение используют следующим образом.
Включают систему газообеспечения, содержащую, например, вентилятор или компрессор, из которой газообразное рабочее тело через отверстие 8 подпятника 7 поступает к несущим поверхностям газостатического опорного узла. Между несущими поверхностями создается избыточное давление, под действием которого ротор приподнимается («всплывает»), образуя эксплуатационный зазор с газостатической опорной подушкой.
Затем включают привод (электродвигатель) с гибкой механической передачей 19 и пяте 5 придают вращение с технологической скоростью. Посредством гибких механических передач 20 и 21 вращение с такой же скоростью придается фигурной опоре 3 и рабочему органу 1 соответственно.
Посредством вращающегося рабочего органа 1 осуществляют различные центробежные и другие технологические процессы. В качестве рабочего органа 1 роторный механизм может содержать ускоритель материала ударно-центробежных дробилок и мельниц, рабочий орган других роторных дробилок и мельниц, барабан центрифуг или сепараторов различного назначения, рабочий орган центробежных испытательных стендов и центробежных литейных машин, паровую или газовую турбину и другие роторные рабочие органы.
Во время холостого вращения при осуществлении технологического процесса и на резонансных частотах вращения в рабочем органе 1 (например, ускорителе материала ударно-центробежной дробилки или мельницы) может проявиться остаточный или режимный дисбаланс (фиг.4) вследствие возникновения динамической неуравновешенности.
Под действием дисбаланса рабочий орган 1 будет смещаться в направлении вектора дисбаланса независимо от фигурной рамы 3 и пяты 5 благодаря тому, что связан с фигурной рамой 3 гибкими элементами 4 и приобретает вращение посредством гибкой механической передачи 21. Смещаясь, рабочий орган 1 освобождает гибкий элемент 13 и тянет за собой гибкий элемент 10. Благодаря этому корректирующая масса 9 смещается в направлении, прямо противоположном направлению смещения рабочего органа 1, и приобретает относительно оси вращения ротора состояние дисбаланса, вектор которого прямо противоположен вектору дисбаланса рабочего органа 1. Рабочий орган 1 перестанет смещаться, когда сила дисбаланса корректирующей массы 9 сравняется с силой его дисбаланса.
При устранении динамической неуравновешенности рабочий орган 1 под действием сил самоцентрирования (Ишлинский А.Ю. Прикладные задачи механики. Книга 2. Механика упругих и абсолютно твердых тел. М.: Наука, 1986. - С.123) сместится в исходное положение. При этом гибкий элемент 10 освобождается, гибкий элемент 13 перемещается за рабочим органом 1, а корректирующая масса 9 перемещается в исходное положение и приобретает относительно оси вращения ротора состояние баланса.
При возникновении дисбаланса в пяте 5 (фиг.4) благодаря тому, что пята 5 связана с фигурной рамой 3 гибкими элементами 6, приобретает вращение посредством гибкой механической передачи 19 и передает вращательный момент фигурной раме 3 посредством гибкой механической передачи 20, она будет смещаться в направлении вектора дисбаланса независимо от фигурной рамы 3 и рабочего органа 1. При этом гибкий элемент 18 освобождается, гибкий элемент 17 перемещается за пятой 5, а корректирующая масса 16 смещается в направлении, прямо противоположном направлению смещения пяты 5 (вектора дисбаланса) и приобретает относительно оси вращения ротора дисбаланс, вектор которого прямо противоположен вектору дисбаланса пяты 5.
При устранении дисбаланса пята 5 под действием сил самоцентрирования (Ишлинский А.Ю. Прикладные задачи механики. Книга 2. Механика упругих и абсолютно твердых тел. М.: Наука, 1986. - С.123) будет смещаться в исходное положение. При этом гибкий элемент 17 освобождается, гибкий элемент 18 перемещается за пятой 5, а корректирующая масса 16 смещается в исходное положение и приобретает относительно оси вращения ротора состояние баланса.
После завершения технологического процесса отключают привод, а после прекращения вращения ротора отключают систему газообеспечения и постепенно прекращают подачу газообразного рабочего тела к несущим поверхностям газостатического опорного узла. Пята 5 плавно опускается на подпятник 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОБАЛАНСИРУЮЩИЙСЯ ВЕРТИКАЛЬНЫЙ РОТОРНЫЙ МЕХАНИЗМ С ГАЗОСТАТИЧЕСКИМ ОПОРНЫМ УЗЛОМ | 2005 |
|
RU2302295C1 |
| РОТОРНЫЙ МЕХАНИЗМ ЦЕНТРОБЕЖНОЙ УСТАНОВКИ | 2000 |
|
RU2183136C1 |
| ВЕРТИКАЛЬНАЯ РОТОРНАЯ УСТАНОВКА С ГАЗОСТАТИЧЕСКОЙ ОПОРОЙ | 2003 |
|
RU2246055C1 |
| ВЕРТИКАЛЬНАЯ РОТОРНАЯ УСТАНОВКА С ГАЗОСТАТИЧЕСКИМ ОПОРНЫМ УЗЛОМ | 2003 |
|
RU2236904C1 |
| ВЕРТИКАЛЬНЫЙ РОТОРНЫЙ МЕХАНИЗМ С САМОБАЛАНСИРУЮЩИМСЯ РАБОЧИМ ОРГАНОМ | 2003 |
|
RU2259238C1 |
| ЦЕНТРИФУГА | 2010 |
|
RU2430787C1 |
| Центробежная установка с газостатическим опорным узлом | 2002 |
|
RU2222381C1 |
| ЦЕНТРОБЕЖНАЯ УСТАНОВКА С ГАЗОСТАТИЧЕСКОЙ ОПОРОЙ | 2001 |
|
RU2220782C2 |
| ВЕРТИКАЛЬНАЯ РОТОРНАЯ УСТАНОВКА С ОПОРОЙ НА ПОДУШКЕ ИЗ ТЕКУЧЕЙ СРЕДЫ | 2004 |
|
RU2277440C1 |
| РОТОРНАЯ УСТАНОВКА С ОПОРОЙ НА ПОДУШКЕ ИЗ ТЕКУЧЕЙ СРЕДЫ | 2003 |
|
RU2241546C1 |
Изобретение относится к области производства роторных механизмов для различных отраслей промышленности и касается самобалансирующегося вертикального роторного механизма с газостатической опорой, содержащего рабочий орган, газостатический опорный узел с соответствующими друг другу по форме несущими поверхностями, пята которого объединена с рабочим органом, образуя ротор, а подпятник которого имеет отверстие для подвода газообразного рабочего тела к несущим поверхностям, систему газообеспечения и привод. Механизм содержит фигурную опору, расположенную между рабочим органом и пятой и связанную с ними посредством гибких элементов, узел коррекции дисбаланса рабочего органа и узел коррекции дисбаланса пяты, каждый из которых состоит из корректирующей массы в виде кольца и гибких элементов, связывающих корректирующую массу с рабочим органом и пятой соответственно и взаимодействующих с фигурной опорой, и гибкие механические передачи для придания вращательного момента от пяты фигурной опоре и от фигурной опоры рабочему органу, каждая из которых состоит из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим, причем места соединения гибких элементов узлов коррекции дисбаланса рабочего органа и пяты с рабочим органом и пятой соответственно расположены ближе к оси вращения ротора по сравнению с местами их взаимодействия с фигурным основанием. Данный роторный механизм имеет повышенную надежность в работе. 4 ил.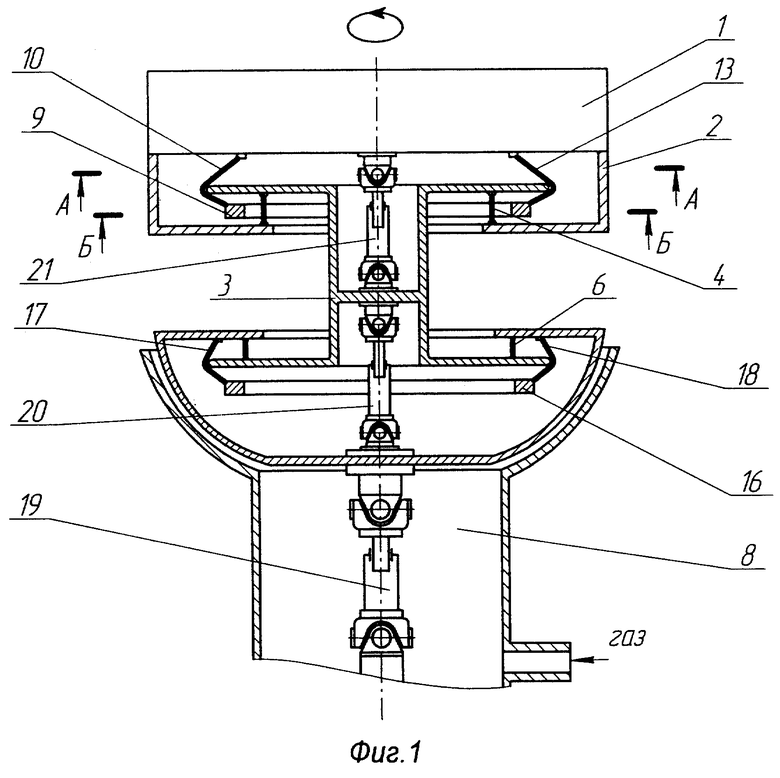
Самобалансирующийся вертикальный роторный механизм с газостатической опорой, содержащий рабочий орган, газостатический опорный узел с соответствующими друг другу по форме несущими поверхностями, пята которого объединена с рабочим органом, образуя ротор, а подпятник которого имеет отверстие для подвода газообразного рабочего тела к несущим поверхностям, систему газообеспечения, связанную с отверстием подпятника, и привод с механической передачей, состоящей из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим, отличающийся тем, что механизм содержит фигурную опору, расположенную между рабочим органом и пятой и связанную с ними посредством гибких элементов, узел коррекции дисбаланса рабочего органа и узел коррекции дисбаланса пяты, каждый из которых состоит из корректирующей массы в виде кольца и гибких элементов, связывающих корректирующую массу с рабочим органом и пятой соответственно и взаимодействующих с фигурной опорой, и гибкие механические передачи для придания вращательного момента от пяты фигурной опоре и от фигурной опоры рабочему органу, каждая из которых состоит из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим, причем места соединения гибких элементов узлов коррекции дисбаланса рабочего органа и пяты с рабочим органом и пятой соответственно расположены ближе к оси вращения ротора по сравнению с местами их взаимодействия с фигурным основанием.
| РОТОРНЫЙ МЕХАНИЗМ ЦЕНТРОБЕЖНОЙ УСТАНОВКИ | 2000 |
|
RU2183136C1 |
| ЦЕНТРОБЕЖНАЯ УСТАНОВКА | 2000 |
|
RU2199394C2 |
| US 5516052 А, 14.05.1996 | |||
| ГАЗОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ЕГО РАБОТЫ | 2008 |
|
RU2502066C2 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 0 |
|
SU347948A1 |

