Манипуляционный буропогрузочный робот предназначен для горнодобывающей промышленности, промышленного и гражданского строительства и может быть применен для автоматизации и роботизации процессов при проведении горизонтальных и наклонных горных выработок буровзрывным способом.
При проведении буровзрывных работ выход негабаритов горных пород может составлять до 15% от взорванной горной массы, что снижает производительность погрузочного оборудования, срок его службы, нарушает ритм работы в выработке и влечет за собой значительные затраты времени на вторичное дробление негабаритов механическим или взрывным способами.
В качестве аналога рассматривается устройство, представляющее собой систему горнопроходческих машин, состоящих из подсистем отделения горной массы, уборки горной массы и закрепления образовавшегося пространства (Патент России №2144139 от 14.07.1997, МПК E 21 D 13/04). Подсистемы отделения и уборки горной массы выполнены в виде буропогрузочных модулей, включающих в себя самоходные погрузочные машины периодического действия с навесным бурильным оборудованием.
Известное устройство обладает следующими недостатками.
1. Отсутствие автоматического контроля и управления буропогрузочным комплексом в зависимости от гранулометрического состава взорванной горной массы.
2. Невозможность проведения операций при вторичном дроблении негабаритов взрывом.
3. Конструкция манипулятора не обеспечивает необходимые манипулирования при смене расположенного произвольным образом, в том числе на почве, навесного оборудования.
4. Отсутствие средств, обеспечивающих автоматическое крепление сменного навесного оборудования на манипуляторе буропогрузочной машины.
В качестве прототипа рассматривается устройство, представляющее собой буропогрузочную машину, состоящую из погрузочной части, представляющей собой погрузочную машину непрерывного действия с боковым захватом, и бурильной части, включающей две электрические бурильные машины или две бурильные пневматические машины, два манипулятора и два пульта управления (Горнопроходческие машины и комплексы: Учеб. для вузов/Л.Г.Грабчак, В.И.Несмотряев, В.И.Шендеров, Б.Н.Кузовлев. - М.: Недра, 1990, с.115).
Известное устройство обладает следующими недостатками.
1. Отсутствие автоматического контроля и управления буропогрузочным комплексом в зависимости от гранулометрического состава взорванной горной массы.
2. Невозможность проведения операций во время проветривания выработки, в том числе, при вторичном дроблении негабаритов взрывом.
3. Конструкция манипулятора не обеспечивает необходимые манипулирования при смене расположенного произвольным образом, в том числе на почве, навесного оборудования.
4. Отсутствие средств, обеспечивающих автоматическое крепление сменного навесного оборудования, на манипуляторе буропогрузочной машины.
Изобретение направлено на увеличение производительности, повышение темпов работ и уровня автоматизации, улучшение техники безопасности при проведении выработок буровзрывным способом, что обеспечивается тем, что манипуляционный буропогрузочный робот состоит из систем отделения горной породы, погрузки горной массы, содержащих самоходную погрузочную машину с гусеничной ходовой частью 1 и навесное бурильное оборудование 2 манипуляционной системы и системы обеспечения требуемого гранулометрического состава горной массы, причем манипуляционная система содержит платформу 3 с гидравлическими замками 4, манипулятор 5 с тремя переносными и тремя ориентирующими степенями подвижности, работающий в сферической системе координат, и раму 6, а система обеспечения требуемого гранулометрического состава горной массы содержит осветительное устройство 7, цифровую фотокамеру 8, микропроцессорное устройство анализа изображений 9 и навесное ударно-скалывающее оборудование 10, причем для управления приводами используется микропроцессорное устройство 11, которое связано с микропроцессорным устройством анализа изображений 9 через регистры для параллельной передачи данных 12, при этом ввод последовательности выполнения буровых и погрузочных операций в микропроцессорное устройство управления приводами 11 осуществляется посредством пульта дистанционного управления 13, а управление направленным движением осуществляется установленной на роботе навигационной системой 14.
Сущность изобретения поясняется чертежом, где представлена компоновочная схема манипуляционного буропогрузочного робота, который содержит гусеничную ходовую часть 1 и навесное бурильное оборудование 2, платформу 3 с гидравлическими замками 4, закрепленную на манипуляторе 5, размещенном на раме 6, которая закреплена на гусеничной ходовой части 1, осветительное устройство 7, цифровую фотокамеру 8, закрепленную на манипуляторе 5, микропроцессорное устройство анализа изображений 9 и навесное ударно-скалывающее оборудование 10, причем сменное навесное оборудование устанавливается на платформе 3, при этом для управления приводами используется микропроцессорное устройство 11, которое связано с микропроцессорным устройством анализа изображений 9 через регистры для параллельной передачи данных 12.
Устройство работает следующим образом.
Работа манипуляционного буропогрузочного робота начинается с ввода в микропроцессорное устройство управления приводами 11 робота посредством пульта дистанционного управления 13, последовательности выполнения буровых и погрузочных операций.
После ввода информации происходит активизация силовых и управляющих систем манипуляционного буропогрузочного робота и выполнение подготовительных операций, включающих проверку работоспособности устройств и смену навесного оборудования 2 или 10 в случае необходимости.
При выполнении буровых операций манипуляционный буропогрузочный робот, направляемый навигационной системой 14, подъезжает к забою, осуществляет бурильные работы и отъезжает на безопасное расстояние для проведения взрывных работ. Для перехода к выполнению погрузочных операций автоматически осуществляется смена бурильного оборудования 2 на ударно-скалывающее оборудование 10.
При выполнении погрузочных операций буропогрузочный робот, направляемый навигационной системой 14, движется к забою, осуществляя погрузку взорванной горной массы, контролируемой системой обеспечения требуемого гранулометрического состава. В случае обнаружения негабарита, робот прекращает выполнение погрузки взорванной горной массы. Микропроцессорное устройство анализа изображений 9 передает микропроцессорному устройству управления приводами 11 координаты центра масс негабаритных объектов и осуществляется разрушение негабаритов навесным ударно-скалывающим оборудованием 10, после чего продолжается погрузка горной массы. Закончив погрузку горной массы, робот возвращается на исходную позицию. В случае перехода к выполнению буровых операций автоматически осуществляется смена ударно-скалывающего оборудования 10 на бурильное оборудование 2.
После выполнения заданной последовательности буровых и погрузочных операций манипуляционный буропогрузочный робот переходит в состояние ожидания команд с пульта дистанционного управления 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ГОРНОПРОХОДЧЕСКИХ МАШИН | 1997 |
|
RU2144139C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2011 |
|
RU2455489C1 |
| Буропогрузочная машина | 1977 |
|
SU699204A1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2011 |
|
RU2460884C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2426884C1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ С МЕРЗЛОЙ И ПЛОХО РАЗРЫХЛЕННОЙ ПОРОДОЙ, СОДЕРЖАЩЕЙ НЕГАБАРИТНЫЕ КУСКИ | 2022 |
|
RU2812721C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2449127C1 |
| Агрегат для проведения выработок большого сечения | 1979 |
|
SU911038A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1991 |
|
RU2042831C1 |
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |
Изобретение относится к горной промышленности и может быть использовано при проведении горизонтальных и наклонных горных выработок буровзрывным способом. Манипуляционный буропогрузочный робот состоит из систем отделения и погрузки горной массы, содержащих самоходную погрузочную машину на гусеничном ходу и навесное бурильное оборудование, манипуляционной системы, содержащей платформу и манипулятор, и системы обеспечения требуемого гранулометрического состава горной массы. Последняя система содержит осветительное устройство, цифровую фотокамеру, микропроцессорное устройство анализа изображений и навесное ударно-скалывающее оборудование. Навесное оборудование, выполненное сменным, устанавливается на платформе, которая закреплена на манипуляторе, размещенном на раме, которая закреплена на ходовой гусеничной части, а цифровая фотокамера закреплена на манипуляторе и направлена параллельно оси навесного оборудования. Для управления приводами используется микропроцессорное устройство, которое связано с микропроцессорным устройством анализа изображений посредством регистров параллельной передачи данных. Устройство направлено на увеличение производительности, повышение темпов работ и уровня автоматизации, повышение безопасности при проведении выработок буровзрывным способом. 1 ил.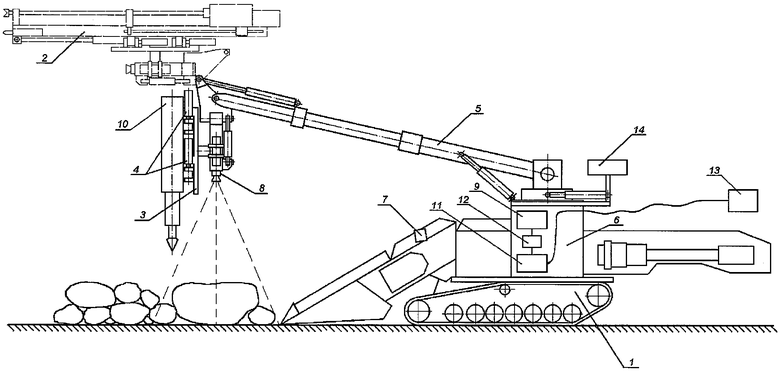
Манипуляционный буропогрузочный робот, состоящий из систем отделения и погрузки горной массы, содержащих самоходную погрузочную машину на гусеничном ходу и навесное бурильное оборудование, отличающийся тем, что на роботе установлена манипуляционная система и система обеспечения требуемого гранулометрического состава горной массы, причем манипуляционная система содержит платформу и манипулятор, а система обеспечения требуемого гранулометрического состава горной массы содержит осветительное устройство, цифровую фотокамеру, микропроцессорное устройство анализа изображений и навесное ударно-скалывающее оборудование, при этом сменное навесное оборудование установлено на платформе, которая закреплена на манипуляторе, размещенном на раме, которая закреплена на ходовой гусеничной части, а цифровая фотокамера закреплена на манипуляторе и направлена параллельно оси сменного навесного оборудования, причем для управления приводами используется микропроцессорное устройство, которое связано с микропроцессорным устройством анализа изображений посредством регистров параллельной передачи данных.
| ГРАБЧАК Л.Г | |||
| и др | |||
| Горнопроходческие машины и комплексы | |||
| М.: Недра, 1990, с.102-117.RU 2016756 С1, 30.07.1994.RU 2144139 С1, 10.01.2000.SU 1548445 А1, 07.03.1990.SU 994719 А, 17.02.1983.SU 350941 А, 20.09.1972.КЛОРИКЬЯН С.Х | |||
| Машины и оборудование для шахт и рудников | |||
| М.: Изд-во МГГУ, 1994, с | |||
| Приспособление для обрезывания караваев теста | 1921 |
|
SU317A1 |

