Изобретение относится к измерительной технике и может быть использовано для построения измерительных схем поплавковых ротаметрических преобразователей расхода жидких и газообразных сред с емкостным дифференциальным преобразователем перемещения поплавка.
Емкостные дифференциальные преобразователи перемещения с подвижным общим электродом широко применяются в измерительной технике ввиду их высокой чувствительности, хорошей линейности функции преобразования, малой потребляемой мощности и ничтожно малым усилиям, возникающим на подвижном электроде за счет электростатических сил [1-3].
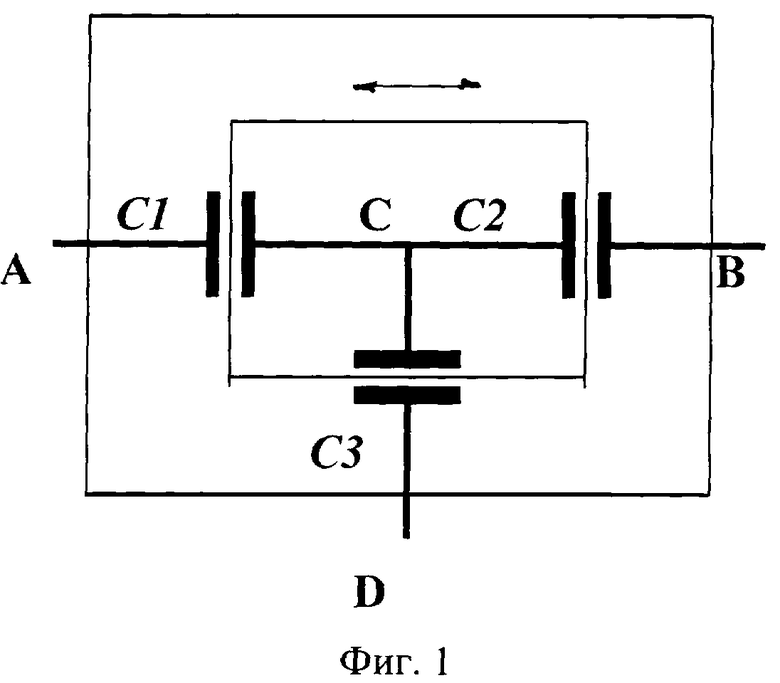
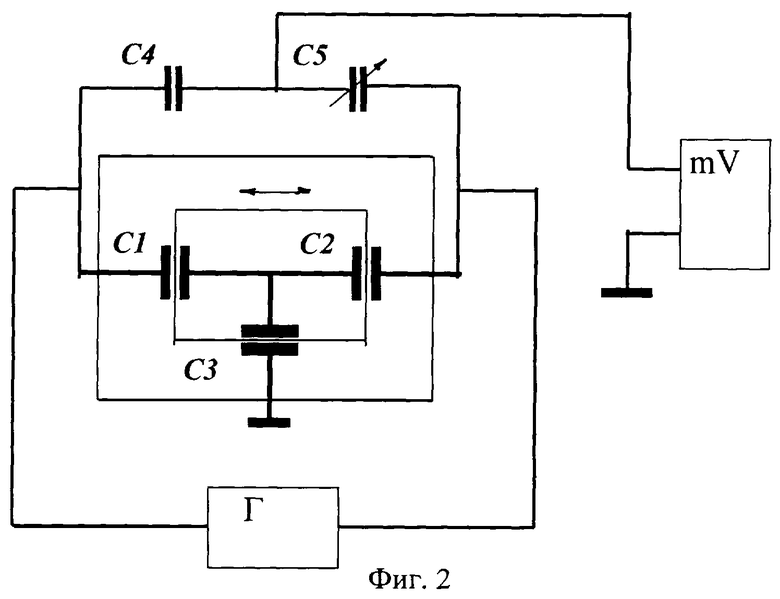
Однако в ряде практически важных случаев (поплавковые уровнемеры, ротаметрические преобразователи расхода жидкостей и газов с емкостным дифференциальным преобразователем перемещения поплавка и др.) подвижный электрод емкостного дифференциального преобразователя недоступен для подсоединения к нему токоподвода. Кроме того, наличие токоподвода неминуемо оказывало бы на подвижный электрод дополнительное паразитное усилие, снижающее точность преобразователя. В этих случаях электрическая связь с подвижным электродом осуществляется за счет емкости связи, образуемой боковой поверхностью электропроводного поплавка и электромагнитным экраном (корпусом преобразователя). В частности, подобная конструкция емкостного дифференциального преобразователя описана в [1] на с.47. Эквивалентная схема такого преобразователя показана на фиг.1. На ней дифференциальные емкости, зависящие от положения подвижного электрода, обозначены как С1 и С2, а емкость связи как С3, Причем, доступный электрод емкости связи обычно заземлен, т.к. одновременно выполняет функции электромагнитного экрана и корпуса преобразователя. При питании такого преобразователя от источника гармонического тока и включении его в мостовую измерительную схему (как показано на фиг.2) отсутствие гальванического контакта с подвижным электродом и наличие емкости связи не вызывает проблем. Однако такая измерительная схема весьма чувствительна к паразитным распределенным емкостям, особенно при малых значениях дифференциальных емкостей емкостного дифференциального преобразователя, требует весьма тонкой индивидуальной настройки (с помощью подстроечного конденсатора С5, включаемого в мостовую схему) и неудобна для применения цифровых методов измерения. При попытках же включения такого преобразователя в измерительную схему с преобразованием измеряемой величины во временной интервал (схемы с частотно-импульсным или широтно-импульсным преобразованием) наличие емкости связи С3 приводит к серьезным осложнениям. Это связано с тем, что потенциал общей точки такого преобразователя (точки С на фиг.2) не остается неизменным в течение цикла преобразования, что приводит к сильной отрицательной обратной связи через эту емкость. Поэтому изменения дифференциальных емкостей С1 и С2 практически не оказывают влияния на выходной сигнал измерительной схемы. Аналогичные проблемы возникают и при попытках использования автогенераторных измерительных схем с частотным выходом, поскольку емкость связи С3 оказывается включенной в частотозадающие контуры обоих автогенераторов (последовательно с одной из дифференциальных емкостей). Это приводит к настолько сильной связи между автогенераторами, в контуры которых включены емкости С1 и С2 емкостного дифференциального преобразователя, что они взаимно синхронизируются и их частота практически не зависит от соотношения емкостей С1 и С2.
Технической задачей, на решение которой направлено предлагаемое изобретение, является нейтрализация влияния емкости связи емкостного дифференциального преобразователя перемещения с недоступным подвижным электродом при использовании измерительных схем с широтно-импульсным преобразованием.
Данная задача решается путем обеспечения полной компенсации зарядных токов на емкости связи при изменении величины зарядов дифференциальных емкостей. Это достигается тем, что заряд дифференциальных емкостей С1 и С2 осуществляется равными по величине и противоположными по знаку токами, что обеспечивает их взаимную компенсацию в емкости связи С3, а следовательно, и отсутствие заряда на ней во время формирования длительностей временных интервалов, зависящих от значений дифференциальных емкостей преобразователя С1 и С2. Данный способ реализуется следующим образом. В начальный момент все емкости преобразователя должны быть полностью разряжены. Это легко осуществить с помощью аналоговых ключей, подсоединяемых к точкам А и В емкостного дифференциального преобразователя, и при их открывании замыкающих эти точки на землю. Далее эти ключи одновременно закрываются и начинается заряд дифференциальных емкостей С1 и С2 емкостного дифференциального преобразователя от подсоединенных к точкам А и В этого преобразователя источников постоянного тока одинаковой величины, но противоположной полярности. При этом напряжения на дифференциальных емкостях С1 и С2 будут изменяться по линейному закону в противоположных направлениях со скоростями, обратно пропорциональными значениям емкостей C1 и С2. Напряжение же на емкости связи С3 будет оставаться нулевым, т.к. через нее будут протекать равные по величине токи противоположной полярности, компенсирующие друг друга. Напряжения в точках А и В с помощью компараторов сравниваются с пороговыми значениями, задаваемыми от источников опорного напряжения равной величины и противоположной полярности (эти же источники опорных напряжений могут использоваться для формирования упомянутых выше источников тока). Первым сработает тот компаратор, который подсоединен к дифференциальной емкости, имеющей в данный момент меньшее значение. (Полярность пороговых напряжений, подаваемых на компараторы, должна соответствовать полярности напряжений на соответствующих дифференциальных емкостях при их заряде). При достижении порогового значения напряжения на второй дифференциальной емкости (которая в данный момент имеет большее значение) формируется импульс разряда дифференциальных емкостей, открывающий аналоговые ключи, подсоединенные к точкам А и В емкостного дифференциального преобразователя и одновременно заканчивается формирование выходного импульса, ширина которого будет определяться разностью моментов срабатывания компараторов. Для сохранения условий компенсации токов в емкости связи С3 линейная область заряда меньшей из дифференциальных емкостей при ее минимальном значении должна быть больше области линейного заряда большей из дифференциальных емкостей (которая при этом будет иметь максимально возможное значение). В этом случае ток, протекающий через меньшую из дифференциальных емкостей, останется неизменным и после достижения напряжения на ней порогового значения. Это условие будет соблюдаться при выборе абсолютной величины порогов срабатывания компараторов много меньшей максимально возможного (по абсолютной величине) выходного напряжения источников тока. При сохранении постоянства зарядных токов время от начального момента до срабатывания компаратора, подсоединенного к дифференциальной емкости с меньшим значением Т1, и длительность периода Тп, определяемая временем заряда большей емкости, могут быть рассчитаны по формулам
где См - меньшая из дифференциальных емкостей;
Сб - большая из дифференциальных емкостей;
U0 - абсолютная величина опорного напряжения;
Iз - абсолютная величина зарядных токов источников токов.
Если соединить выходы компараторов со входами триггера, то длительность импульса Ти, формируемого этим триггером, будет равна:

Обозначив через Cmin и Сmax минимальное и максимальное возможные значения дифференциальных емкостей С1 и С2 и через Сср - среднее значение дифференциальных емкостей, соответствующее их равенству
C1=C2=Ccp,
получим
Tи min=0 при C1=C2=Ccp;
Tи max=(Cmax-Cmin)U0/Iз.
Чтобы избежать двузначности отсчета (Ти будет одинаковым при противоположных соотношениях дифференциальных емкостей: С1/С2=С2/С1), достаточно определить какой из компараторов сработал первым - с положительным или отрицательным пороговым напряжением, что несложно осуществить как аппаратными, так и программными средствами (последнее возможно при построении измерительной схемы на основе микропроцессора).
Данный способ позволяет осуществить и измерения относительной разности дифференциальных емкостей

Для этого достаточно определить отношение длительности импульса Ти к длительности периода ТП, определяемой соотношением (2), т.е. временем от начала заряда емкостей до срабатывания компаратора, подсоединенного к большей из дифференциальных емкостей.
Данный способ может быть реализован как традиционными аппаратными средствами, так и с помощью микропроцессора, с использованием счетно-импульсного метода измерения временных интервалов. Измерительная схема на базе микропроцессора является более экономичной, гибкой и удобной в эксплуатации, поэтому в качестве примера реализации данного способа рассмотрим именно ее.
Структурная схема на основе микропроцессора, реализующая описанный способ, представлена на фиг.3. Емкостной дифференциальный преобразователь 1, состоящий из дифференциальных емкостей С1 и С2 и емкости связи С3 выделен штриховым прямоугольником. Входы дифференциальных емкостей С1 и С2 подсоединены к аналоговым ключам 2 и 3 и к источникам тока 4 и 5 одинаковой величины, но разной полярности, а также ко входам соответствующих компараторов 7 и 8. Доступный электрод емкости связи С3 заземлен. На вторые входы компараторов 7 и 8 заведены опорные напряжения +U0 и -U0 одинаковой величины, но различной полярности от источника образцовых напряжений 6. Эти же опорные напряжения служат для формирования источников разнополярного тока 4 и 5, которые в этом случае представляют собой усилители с глубокой отрицательной обратной связью по току. Выходы компараторов 7 и 8 подключены к двухвходовой схеме «И» 9 и ко входам микропроцессора 11. Выход двухвходовой схемы «И» подсоединен ко входу одновибратора 10, выход которого подключен к управляющим входам аналоговых ключей 2 и 3.
Схема функционирует следующим образом. В исходном состоянии все емкости емкостного дифференциального преобразователя 1 полностью разряжены, поскольку аналоговые ключи 2 и 3 открыты. В начальный момент времени аналоговые ключи 2 и 3 закрываются и дифференциальные емкости С1 и С2 емкостного дифференциального преобразователя 1 начинают заряжаться от разнополярных источников постоянного тока 4 и 5. Поскольку зарядные токи равны по величине, но имеют противоположную полярность, то, суммируясь на емкости связи С3 емкостного дифференциального преобразователя 1, они компенсируют друг друга, а значит емкость С3 остается полностью разряженной. В то же время дифференциальные емкости С1 и С2 заряжаются этими токами линейно со скоростями, обратно пропорциональными величинам этих емкостей, причем емкость С1 заряжается с положительной полярностью, а емкость С2 - с отрицательной. Напряжение заряда на емкости С1 сравнивается компаратором 8 с опорным напряжением +U0, а напряжение заряда на емкости С2 сравнивается компаратором 7 с опорным напряжением -U0. Первым сработает компаратор, подсоединенный к меньшей емкости, т.к. она будет заряжаться быстрее. Но и после срабатывания компаратора эта емкость должна продолжать линейно заряжаться вплоть до момента срабатывания второго компаратора, подсоединенного к большей емкости. Лишь когда сработает и второй компаратор, двухвходовая схема «И» (9) откроется и сигнал поступит на одновибратор 10, вырабатывающий короткий прямоугольный импульс, поступающий на управляющие входы аналоговых ключей 2 и 3. Открываясь, аналоговые ключи 2 и 3 замыкают дифференциальные емкости С1 и С2 на землю, приводя к их полному разряду. При этом оба компаратора возвращаются в исходное состояние. В момент окончания управляющего импульса аналоговые ключи 2 и 3 закрываются, и весь цикл работы измерительной схемы повторяется. Поскольку на микропроцессор поступают сигналы с выходов обоих компараторов, то программно можно определить и момент начала цикла, и момент срабатывания первого компаратора (подсоединенного к меньшей из дифференциальных емкостей), и момент срабатывания второго компаратора (момент окончания цикла). Соответственно, не представляет труда программно определить Т1, Ти, Тп и их отношение, что позволяет определить См, Сб, ΔС=Сб-См и ΔС/Сб в соответствии с выражениями (1-4). А по очередности срабатывания компараторов легко определить какая из дифференциальных емкостей больше, а какая меньше. Имея же функцию преобразования С=f (X) конкретного емкостного дифференциального преобразователя перемещения, несложно определить и измеряемое перемещение X.
Предлагаемый способ и реализующая его измерительная схема особенно удобны для построения счетчика расхода газа на основе ротаметрического поплавкового первичного преобразователя с емкостным дифференциальным преобразователем перемещения поплавка, поскольку не требует индивидуальных регулировок, позволяя, в то же время, легко осуществлять индивидуальную тарировку всего счетчика при прямом отсчете в единицах объемного расхода газа.
Литература
1. Туричин А.М. Электрические измерения неэлектрических величин. - М. - Л.: Энергия, 1966. - 690 с.
2. Левшина Е.С., Новицкий П.В. Электрические измерения физических величин (измерительные преобразователи). - Л.: Энергоатомиздат, 1983. - 320 с.
3. Фарзане Н.Г., Илясов Л.В., Азим-заде А.Ю. Технологические измерения и приборы. Учебник для вузов. - М.: Высшая школа. 1989. - 456 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ ЧАСТОТНОГО ИНТЕГРИРУЮЩЕГО РАЗВЁРТЫВАЮЩЕГО ПРЕОБРАЗОВАТЕЛЯ ДЛЯ ДАТЧИКОВ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2016 |
|
RU2631494C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЛАЖНОСТИ СЫПУЧИХ МАТЕРИАЛОВ | 1992 |
|
RU2030739C1 |
| ЕМКОСТНЫЙ РОТАМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2284474C9 |
| ПРЕОБРАЗОВАТЕЛЬ ПАРАМЕТРОВ КОНДУКТОМЕТРИЧЕСКОГО ДАТЧИКА В НАПРЯЖЕНИЕ | 2011 |
|
RU2483313C1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ ЕГО КАЛИБРОВКИ | 2006 |
|
RU2335844C2 |
| ИЗМЕРИТЕЛЬНАЯ ЦЕПЬ С ДАТЧИКАМИ ИЗ ШУНТИРОВАННЫХ КОНДЕНСАТОРОВ | 2003 |
|
RU2301405C2 |
| Способ измерения емкости и устройство для его осуществления | 1989 |
|
SU1725158A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРИЧЕСКОЙ ЕМКОСТИ ДЛЯ ЕМКОСТНОГО ДАТЧИКА | 2019 |
|
RU2724299C1 |
| Преобразователь аналог-код | 1975 |
|
SU731580A1 |
| ЕМКОСТНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1989 |
|
RU1588143C |
Изобретение может быть использовано в измерительных схемах поплавковых ротаметрических преобразователей расхода жидких и газообразных сред с емкостным дифференциальным преобразователем перемещения поплавка, где поплавок служит подвижным электродом и недоступен для непосредственного подключения к измерительной схеме. Особенность способа состоит в том, что емкости емкостного дифференциального преобразователя перемещения заряжают от источников постоянного тока разнополярными, но равными по величине токами. Равенство зарядных токов сохраняют во время всего рабочего цикла преобразования. Благодаря этому в емкости связи емкостного дифференциального преобразователя осуществляется полная компенсация зарядных токов и, тем самым, устраняется влияние емкости связи на результат преобразования в схемах с широтно-импульсным преобразованием. 2 н.п. ф-лы, 3 ил.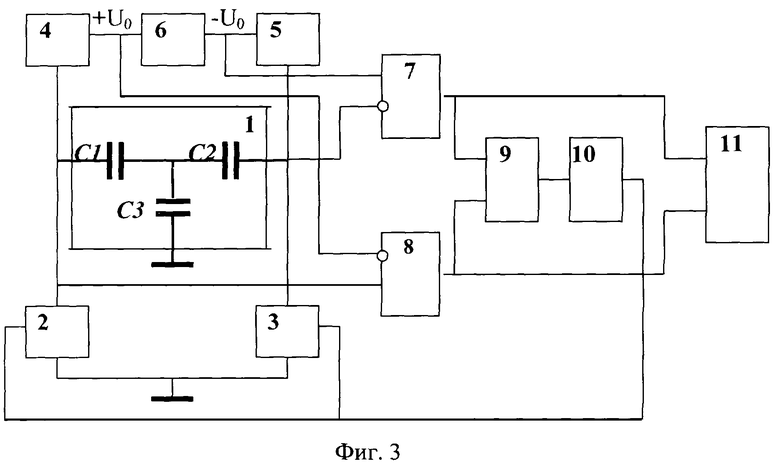
| ИЗМЕРИТЕЛЬ ПЕРЕМЕЩЕНИЯ ТЕЛА | 1998 |
|
RU2175114C2 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| ТУРИЧИН А.М | |||
| Электрические измерения неэлектрических величин | |||
| М.- Л.: Энергия, 1966 | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |

