Область техники
Настоящее изобретение относится к оптическому тактильному датчику, а более точно к тактильному датчику, используемому для манипулятора или руки робота.
Предшествующий уровень техники
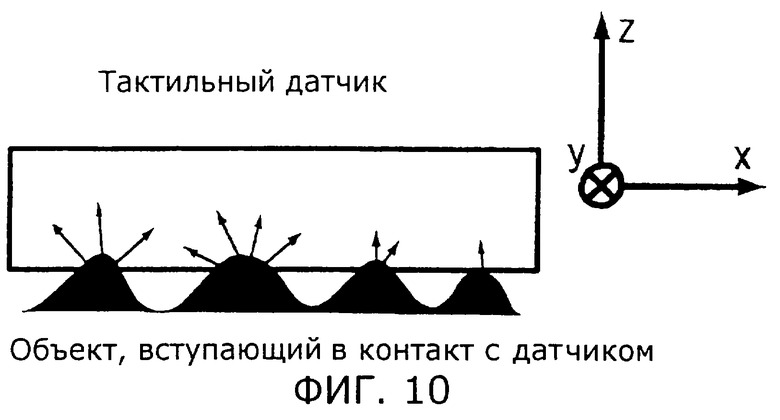
При рассмотрении понятия контактного состояния контактной поверхности с использованием тактильного датчика имеют в виду вектор с тремя компонентами, представляющими размер и направление силы, действующей в каждой точке контактной поверхности. Это представлено как f(x,y) в системе координат (фиг.10). Однако f является вектором и поэтому фактически имеет три компоненты x, y, z в каждой точке. При выражении каждой компоненты это можно представить как f(x,y)=[fx(x,y), fy(x,y),fz(x,y)].
Так как распределение силы имеет три компоненты в каждой точке контакта, чтобы восстановить распределение силы, действующей в точках контактной поверхности при использовании тактильного датчика, необходимо получить информацию для каждой контактной точки на контактной поверхности по меньшей мере с тремя степенями свободы. Однако большинство тактильных датчиков поверхностного типа, которые используются в настоящее время, получают информацию в лучшем случае только для одной степени свободы для каждой точки контактной поверхности, например, в случаях, где используется токопроводящая резина. Следовательно, даже если возможно установить состояние действующей силы и ее распределение, трудно определить, является ли эта сила перпендикулярной к поверхности или действует горизонтально. Это происходит потому, что получают только треть информации, которая позволила бы произвести такое определение.
С другой стороны, тактильным датчикам оптического типа как особым сенсорным устройствам в последнее время уделяется особое внимание. В этих устройствах в отличие от других известных устройств, где механические элементы (например, пьезоэлектрические элементы) используются для прямого измерения воздействия, корпус датчика выполняется в виде прозрачного гибкого корпуса, и маркер располагается внутри прозрачного гибкого корпуса для определения изменения оптических характеристик при использовании любой силы. Состояние контактной поверхности затем оценивается путем фотографирования поведения маркера при использовании системы формирования изображения, например, телекамерой на приборах с зарядовой связью. Преимущество состоит в том, что элементы формирования изображения стали более дешевыми по сравнению с альтернативными механическими устройствами и возможно конструировать тактильные датчики высокой плотности. Однако в этом устройстве на большом количестве этапов информация смещается вверх или вниз или сжимается, и указанная ранее проблема, связанная с недостатком информации, не решается. Даже для известного оптического тактильного датчика достигается получение только одного типа информации (информации в одном измерении).
Краткое изложение существа изобретения
Настоящее изобретение позволяет устранить недостатки известных тактильных датчиков. Задачей настоящего изобретения является создание тактильного датчика, который может получать информацию для многих степеней свободы в каждой точке на поверхности путем введения многоканального считывания, использующего цвет, т.е. световой спектр, по отношению к оптическому тактильному датчику.
Согласно настоящему изобретению, предложен оптический тактильный датчик, снабженный тактильной частью и средством формирования изображения, указанная тактильная часть содержит прозрачный гибкий корпус и множество групп маркеров, расположенных внутри гибкого корпуса, и каждая группа маркеров содержит набор окрашенных маркеров, при этом маркеры, составляющие различные группы маркеров, имеют различную окраску в каждой группе, и поведение окрашенных маркеров в случае, когда объект касается гибкого корпуса, фотографируется средством формирования изображения. По меньшей мере одна из характеристик - смещение, деформация и наклон окрашенных маркеров в случае, когда осуществляется прикосновение к гибкому корпусу, наблюдается при фотографировании поведения окрашенных маркеров. Информацию о деформации внутри прозрачного гибкого корпуса получают из информации об окрашенных маркерах в том случае, когда вступающий в контакт объект касается датчика, а форма вступающего в контакт объекта вычисляется на основании информации о деформации. Также фиксируется информация о силе, действующей на контактной границе раздела, включая как поверхность гибкого корпуса, так и поверхность вступающего в контакт объекта. В соответствии с настоящим изобретением возможно отдельно собирать множество типов информации с помощью простого метода, называемого «цветовым кодированием», и возможно получать множество типов тактильной информации в одно и то же время с помощью оптической системы. В соответствии с настоящим изобретением неизвестное количество независимых наблюдаемых величин собирается при использовании цветового кодирования, при этом возможно оценить и восстановить векторы силы с помощью устойчивого решения обратной задачи.
Окрашенные маркеры фотографируют средством формирования изображения, в предпочтительном варианте воплощения - телекамерой на блоках с зарядовой связью, и осуществляют обработку изображения. Например, изображение во время контакта корпуса с объектом и изображение в предыдущем состоянии, т.е. когда внешняя сила не действует на прозрачный гибкий корпус, сравнивают и определяют величину смещения маркеров. Маркеры размещены в прозрачном гибком корпусе так, что они не могут быть распознаны нормальным образом в состоянии, когда внешняя сила не действует на прозрачный гибкий корпус. При этом конфигурация устройства такова, что маркеры распознаются в ответ на деформацию смещения и наклон маркеров, вызванный деформацией вблизи от положений, в которых существует каждый маркер в том случае, когда объект контактирует с прозрачным гибким корпусом, и информация распознается при появлении окрашенных маркеров.
Предпочтительно, чтобы средства формирования изображения располагались на стороне прозрачного гибкого корпуса, противоположного той стороне, которая контактирует с объектом. В случае, когда имеется множество окрашенных маркеров, имеющих разные цвета, желательно проводить подходящую обработку после формирования изображения путем выбора маркеров конкретного цвета и наблюдения их по отдельности. Выбор маркера конкретного цвета проводится, например, с помощью цветного светофильтра.
Предпочтительно также, чтобы множество групп маркеров монтировалось внутри прозрачного гибкого корпуса, причем каждая группа маркеров составлялась из множества маркеров, и маркеры, составляющие различные группы, имели различные цвета для каждой группы, а группы маркеров имели различное расположение в пространстве. Как пример такого расположения в пространстве существует множество групп маркеров, расположенных в виде слоев внутри гибкого корпуса, или множество групп маркеров, расположенных таким образом, чтобы пересекаться друг с другом. В этом случае получаемое изображение устанавливается в состояние, когда конкретная обработка информации, например создание конкретного типа двумерной информации, уже осуществлена.
Форма окрашенных маркеров не ограничена и в описываемом варианте может быть сферической, цилиндрической, колоновидной, маркеры могут иметь форму полосы или плоскости, и преимущества этих форм будут описаны ниже.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает конструкцию датчика согласно изобретению;
фиг.2 - конструкцию датчика в соответствии с первым вариантом реализации согласно изобретению;
фиг.3 - процесс изготовления датчика первого варианта реализации согласно изобретению;
фиг.4 - конструкцию датчика в соответствии со вторым вариантом реализации согласно изобретению;
фиг.5 - пример изображения, полученного во время контакта в датчике второго варианта реализации, согласно изобретению;
фиг.6 - процесс изготовления датчика второго варианта реализации согласно изобретению;
фиг.7 - конструкцию датчика в соответствии с третьим вариантом реализации согласно изобретению;
фиг.8 - процесс изготовления датчика третьего варианта реализации согласно изобретению;
фиг.9 - конструкцию датчика в соответствии с пятым вариантом реализации согласно изобретению;
фиг.10 - распределение вектора силы между тактильным датчиком и объектом;
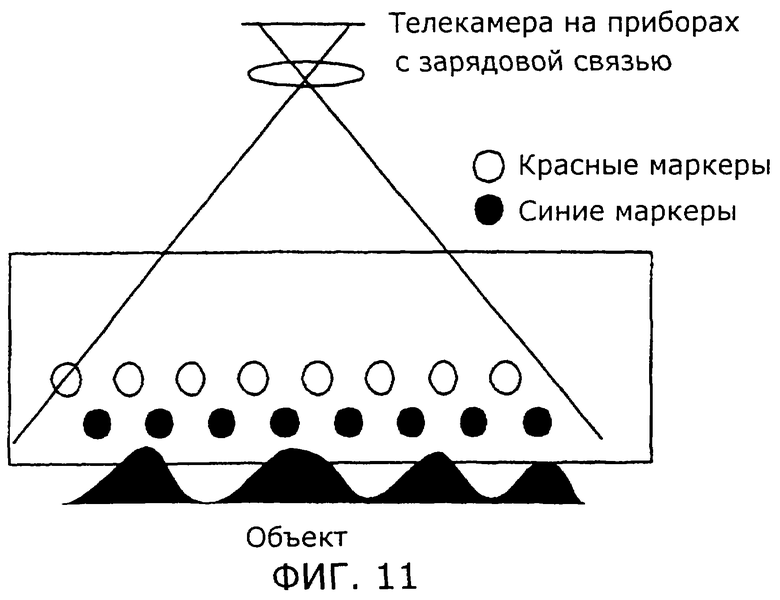
фиг.11 - оптический тактильный датчик, использующий измерение смещения маркеров, согласно изобретению;
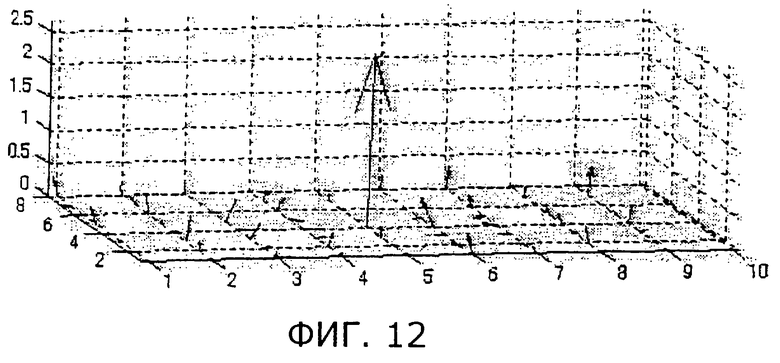
фиг.12 - восстановленное распределение вектора силы для случая, когда отдельная точка была сжата в вертикальном направлении, согласно изобретению;
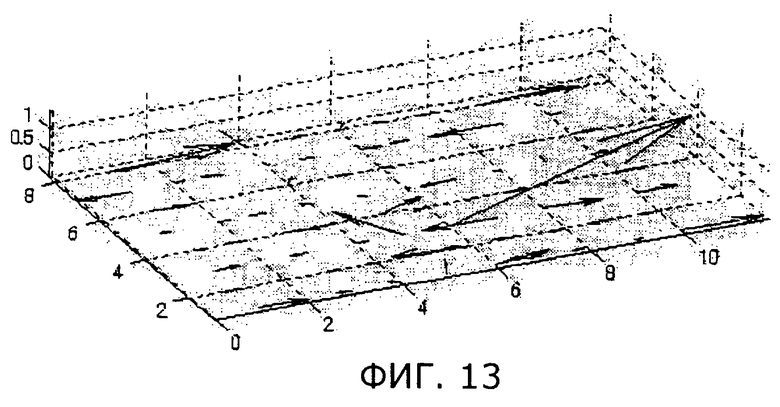
фиг.13 - восстановленное распределение вектора силы для случая, когда отдельная точка была сжата в горизонтальном направлении, согласно изобретению;
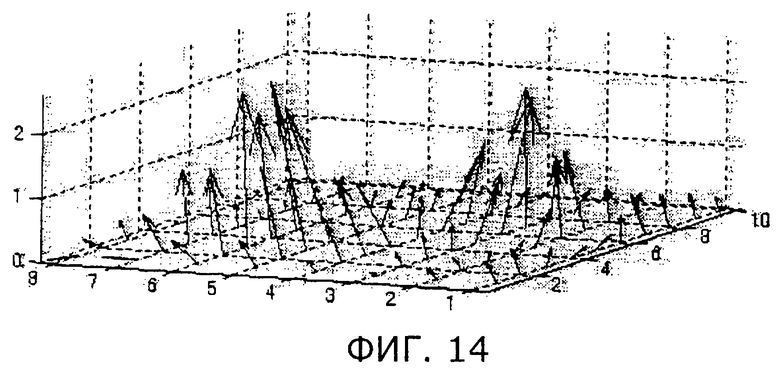
фиг.14 - восстановленное распределение вектора силы для случая, когда были сжаты две точки, согласно изобретению;
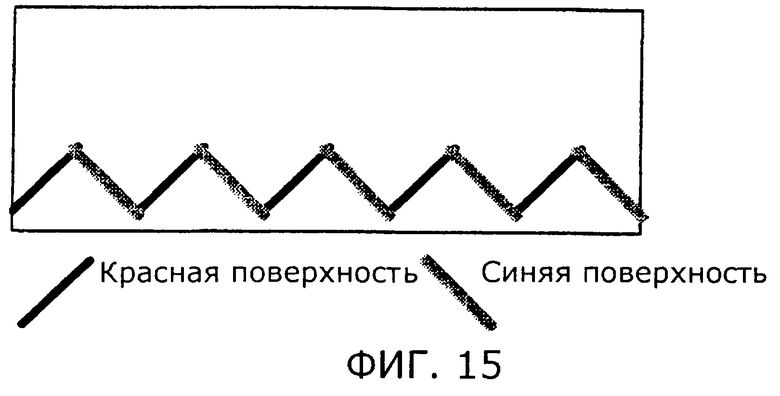
фиг.15 - ступенчатый способ четвертого варианта реализации при наблюдении сбоку согласно изобретению;
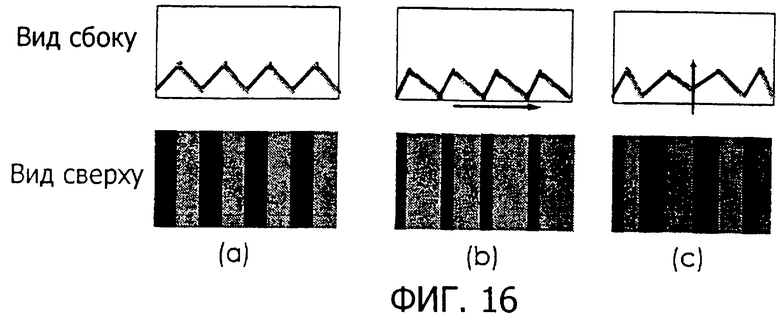
фиг.16 - изображения, полученные при наблюдении с верхней поверхности гибкого корпуса, показанного на фиг.15, причем фиг.16(а) показывает нормальные состояния, фиг.16(b) показывает случай, когда горизонтальная сила была приложена к контактной поверхности, и фиг.16(с) показывает случай, когда вертикальная сила была приложена к контактной поверхности, согласно изобретению;
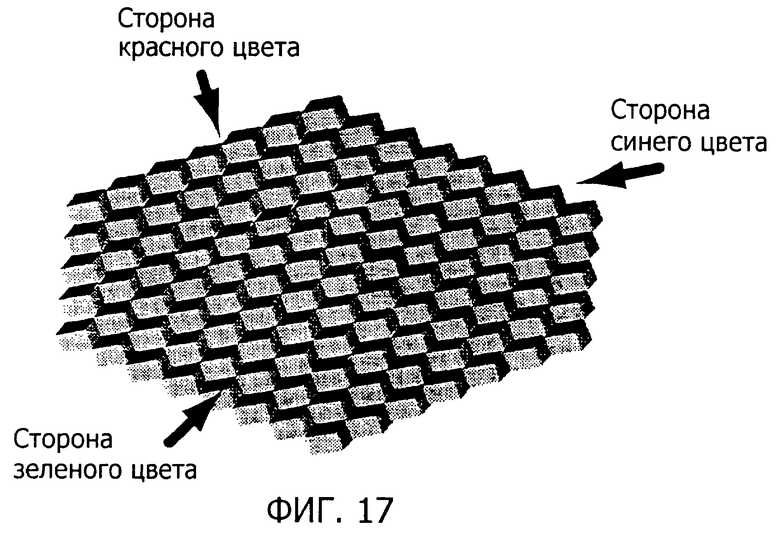
фиг.17 - нижнюю поверхность пирамидальной формы с тремя группами поверхностей, окрашенных в красный, зеленый и синий цвета соответственно, причем цвета совмещаются при наблюдении сверху с получением белого цвета, согласно изобретению;
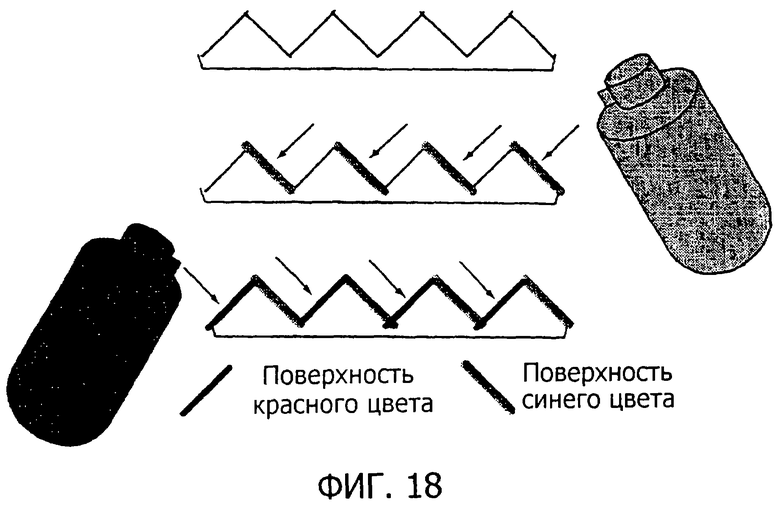
фиг.18 - окраску каждой отдельно наклоненной поверхности согласно изобретению;
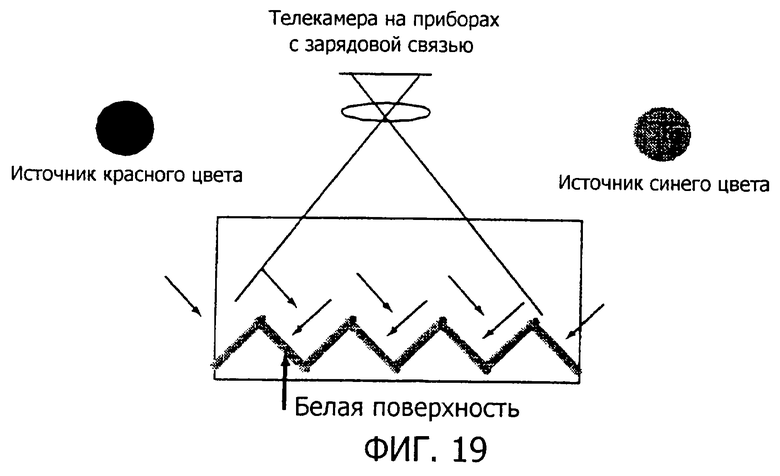
фиг.19 - схему наблюдения, когда свет, рассеянный от белой поверхности, наблюдают при использовании направленного светового источника, согласно изобретению;
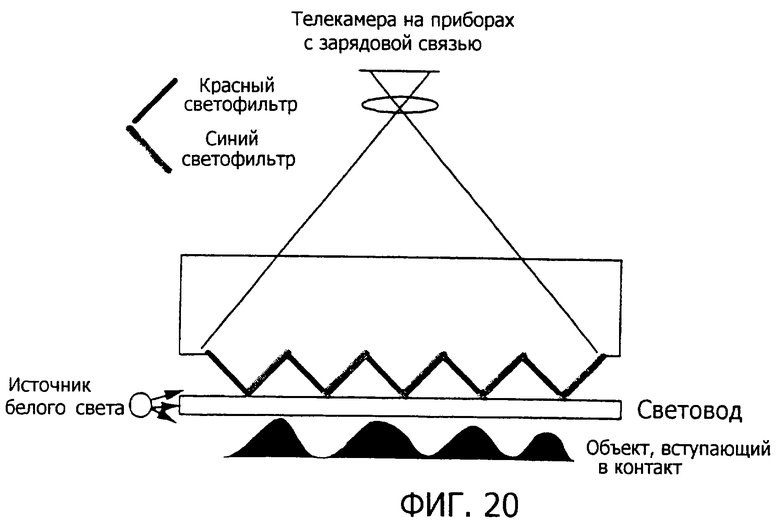
фиг.20 - датчик, имеющий сочетание оптических тактильных датчиков ступенчатого типа и световодов, согласно изобретению;
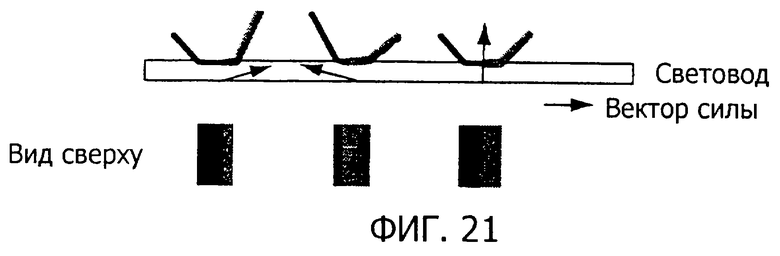
фиг.21 - изменение контакта между ступенчатой поверхностью и волноводом как результат усилия, влияющего на волновод при возникновении изменений в наблюдаемом изображении, согласно изобретению.
Предпочтительный вариант реализации изобретения
Оптический тактильный датчик согласно изобретению содержит прозрачный гибкий корпус 1 (фиг.1), сформированный из прозрачного эластичного материала, с окрашенными маркерами 2, смонтированными в прозрачном гибком корпусе 1. Тактильная часть сформирована из прозрачного гибкого корпуса 1 и окрашенных маркеров 2. Когда объект 3 контактирует с прозрачным гибким корпусом 1, окрашенные маркеры 2 смещаются или деформируются. Датчик снабжен также оптической камерой 4 в качестве средства формирования изображения и источником света 5. Оптическая камера 4 располагается на стороне, противоположной к той, у которой происходит касание датчика и объекта 3, так что прозрачный гибкий корпус 1 помещается между оптической камерой 4 и объектом 3, и смещение или деформация маркеров 2 фотографируется камерой 4. Световой источник 5 может проводить свет с использованием волновода (оптического волокна).
Прозрачный гибкий корпус 1 предпочтительно изготавливается из силиконовой резины, но также он может быть выполнен из другого эластичного материала, из другого типа резины или эластомера. Маркеры предпочтительно изготавливаются из эластичного материала и более предпочтительно из того же материала, что и прозрачный гибкий корпус 1. В предпочтительном варианте реализации они формируются при добавлении пигмента к силиконовой резине. Так как деформация гибкого корпуса не должна подавляться маркерами, маркеры также предпочтительно изготавливаются из эластичного материала, имеющего такую же постоянную упругости, как и гибкий корпус. Материал маркеров не ограничивается, поскольку расстояние, до которого деформация гибкого корпуса подавляется, является достаточно малым. Также возможно, чтобы маркеры составляли часть гибкого корпуса.
В настоящем изобретении множество оптических маркеров распределяется внутри прозрачного гибкого корпуса 1. Информация о вступающем в контакт объекте и информация о смещении и деформации внутри гибкого корпуса, полученных при контакте, фиксируются при фотографировании камерой ситуаций, когда смещение, деформация и наклон возникают в маркерах из-за деформации гибкого корпуса 1 как результат контакта объекта и гибкого корпуса 1.
Камера, как устройство формирования изображения, является цифровой камерой, точнее - камерой для вывода данных изображения в виде электрических сигналов. В предпочтительном варианте реализации она представляет собой телекамеру на приборах с зарядовой связью. Ясно, что устройства формирования изображения не ограничиваются телекамерой на приборах с зарядовой связью. Возможно использовать, например, цифровую камеру, использующую датчик изображения типа КМОП (С-MOS). Тот факт, что окрашенные маркеры идентифицируются в соответствии с их цветом, является одним из наиболее важных факторов при увеличении «разумных» возможностей датчика настоящего изобретения, и желательно смонтировать цветные светофильтры на элементах формирования изображения. В случае, когда не существует цветных светофильтров на элементах формирования изображения, используется мощность света, а более конкретно только белое и черное изображения. Если световые источники цветов, имеющие спектр, находящийся внутри цветного спектра, отраженного маркерами, используются как световые источники внутри датчика, так как изображение, когда каждый световой источник светится, содержит только свет, излучаемый соответствующими маркерами, датчик будет функционировать таким же образом, как с цветными светофильтрами на элементах формирования изображения. В описанных выше ситуациях, если три типа маркеров изготавливаются как красные, зеленые и синие, существует два способа восприятия этих трех цветов по отдельности. 1) Способ разделения, использующий цветные светофильтры при рассмотрении сигнала «красный-зеленый-синий», выходящего из камеры в этом случае, каждый маркер индивидуально непосредственно фотографируется. 2) Способ, когда элементы формирования изображения воспринимают только интенсивность света и изготавливаются световые источники «красный-зеленый-синий».
Когда красный светится, свет отражается от красных маркеров, в то время как красный свет поглощается маркерами двух других цветов, и поэтому камера эффективно воспринимает только красные маркеры. Если это осуществляется в течение отдельного времени для зеленого и синего цвета, может быть получена информация, эквивалентная той, которая получается при использовании способа (1). Три цвета: красный, синий и зеленый, упомянутые здесь, являются только примером, а реально цветной спектр не ограничен, и теоретически цвета маркеров (более точно, спектр отраженного света) могут быть выбраны из неограниченного количества цветов, поскольку они не зависят друг от друга.
В типичном варианте реализации настоящего изобретения придание маркерам множества разных цветов позволяет получить сфотографированное изображение, которое обладает информацией для множества степеней свободы. Примеры описаны при преобразованном смещении и деформации сдвига вблизи от положений, в которых маркеры существуют, для получения информации из изображения.
Настоящее изобретение характеризуется тем, что используются окрашенные маркеры, при этом изобретение может быть охарактеризовано двумя отличительными признаками. Во-первых, конструкция самих маркеров не отличается особенными существенными признаками, при этом информацию о деформации получают для гибкого корпуса путем обработки полученного изображения на ПК, которая далее называется «обработка изображения», это является первым вариантом реализации изобретения, описанным ниже. Во-вторых, сами маркеры являются как бы разумными, а полученное изображение представляет информацию о гибком корпусе, что далее называется «способ разумного материала», это является вторым, третьим, четвертым и пятым вариантами реализации изобретения, описанными ниже.
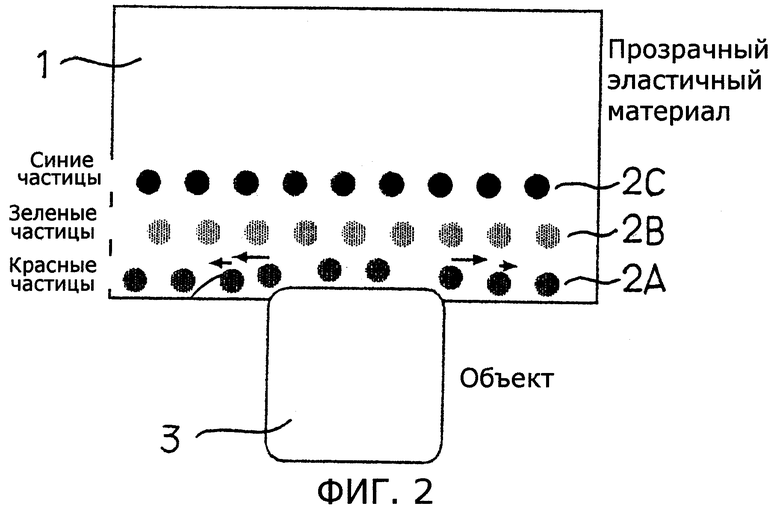
Первый вариант реализации изобретения имеет сферические маркеры, расположенные по направлению вглубь. Микроскопические окрашенные сферические частицы (фиг.2) используются как маркеры, они распределяются по отдельности во множестве слоев в соответствии с цветом. Например, если они подразделяются на красные, зеленые, синие, они являются простыми для восприятия при разделении каждого слоя с использованием цветовых светофильтров камеры. Для указанного расположения группа маркеров 2А, составленная из красных микроскопических сферических маркеров, монтируется в самой неглубокой части (со стороны, удаленной от камеры) по отношению к поверхности прозрачного гибкого корпуса 1, с которой приходит в контакт объект 3, группа маркеров 2В, составленная из зеленых микроскопических сферических частиц, монтируется в части, которая расположена глубже, чем слой, в котором монтируется группа маркеров 2А, и группа маркеров 2С, составленная из синих микроскопических сферических маркеров, монтируется в части, которая расположена глубже, чем слой, в котором монтируется группа маркеров 2В (со стороны, ближайшей к камере). Камера располагается таким образом, чтобы она была обращена к поверхности, противоположной поверхности, которой касается объект 3 (не показано).
Сферические маркеры, формирующие каждый слой, предпочтительно не перекрываются друг с другом в направлении слоя (на чертежах это направление от верхней части к нижней), и в этом варианте реализации сферические маркеры, составляющие каждый слой, случайно распределены с определенной плотностью. Так как существуют изображения с экстремально малой пространственной автокорреляцией, то, если маркеры располагаются беспорядочным образом (при преобразовании в двоичную форму, давая так называемые изображения белого шума), возможно сравнивать изображения, когда объект касается корпуса, и изображения перед тем, как объект касается корпуса, для получения величины смещения пикселей в каждой точке. В частности, вычисление корреляции осуществляется для изображений, полученных перед контактом и после контакта. Вектора смещения определяются для каждой точки. Чтобы это осуществить, маркеры предпочтительно имеют такой размер, что они могут быть расположены от 1Ч1 до не более 10Ч10 пикселей камеры.
За счет расположения окрашенных маркеров различных цветов на различной глубине в гибком корпусе становится возможным измерять величину горизонтального смещения на выделенной глубине. Плотность, с которой маркеры располагаются в каждом слое, предпочтительно меньше при приближении к верхнему слою (стороне, наиболее удаленной от поверхности, которой касается объект), т.е. приближении к камере. Причина состоит, во-первых, в том, что маркеры в верхнем слое имеют тенденцию скрывать маркеры лежащих ниже слоев, что не является предпочтительным с точки зрения обработки изображения, и, во-вторых, в том, что по мере увеличения отделения от контактной поверхности при движении к верхним слоям пространственная частота смещения снижается, и чтобы его вычислить, не требуются маркеры с высокой плотностью.
Предпочтительно использовать камеру из диапазона от камеры с точечным отверстием диафрагмы и ручной настройкой фокуса на всех глубинах до камеры с большой глубиной фокуса, но в случае использования камеры с линзой, имеющей малую глубину фокуса, лучше производить фокусировку на самый нижний слой. Как описывалось ранее, смещение верхнего слоя имеет низкую пространственную частоту, и для восприятия этого смещения не требуется высокое разрешение, и даже если существует фокус на самом нижнем слое, нечеткость на слоях, расположенных выше, не имеет никакого воздействия на обработку изображения.
Восстановление вектора силы путем смещения маркеров и получаемый эффект в датчике, снабженном двухслойными группами маркеров (фиг.11), описано ниже. Множество маленьких окрашенных сфер (маркеров) смонтировано внутри гибкого корпуса, смещение в каждой точке измеряется путем фотографирования с помощью телекамеры на приборах с зарядовой связью. Смещение, измеряемое в это время, является горизонтальным смещением и, следовательно, имеет две компоненты - х и у. Следовательно, информация для двух степеней свободы получается от каждого маркера. Возможно в итоге получить поверхностное распределение векторов смещения. Как описывалось ранее, так как векторы силы имеют три компоненты в каждой точке, недостаточно восстановить векторы силы с датчиком только для двух компонент для каждой точки на поверхности, как указано выше. Однако, если маркеры создаются для еще одного слоя (фиг.11), возможно получить распределение для другой группы векторов смещения. Так как в итоге оказывается возможным получить независимо четыре компоненты смещения для каждой точки, возможно восстановить распределение тройного вектора поверхностной силы. При изготовлении групп маркеров, смонтированных в отдельных слоях соответствующих различных цветов (здесь они являются красными и синими), каждая группа маркеров отделяется от взятого изображения и отдельно вычисляются соответствующие векторы смещения. Маркеры могут быть микроскопическим белым шумом или сферами с диаметром несколько миллиметров. В настоящем образце используемые маркеры имеют диаметр около 1 мм. По этой причине существовала проблема, связанная с тем, что маркеры нижнего слоя заслонялись маркерами верхнего слоя. Чтобы это избежать, маркеры каждого слоя располагались так, чтобы не перекрывать друг друга.
На фиг.12-14 представлены восстановленные векторы сил. На фиг.12 представлен случай, когда оказывается давление (нажим) в вертикальном направлении в одной точке в центре контактной поверхности, на фиг.13 представлен случай, когда оказывается давление (нажим) в горизонтальном направлении в той же самой точке. Из этих двух результатов ясно, что восстановление возможно по меньшей мере для векторов силы, действующих в одной точке. На фиг.14 представлен случай, когда нажим осуществляется в двух точках контактной поверхности, при этом восстанавливается распределение сил для контактирующей поверхности. Эта система имеет простую идеологию и может быть легко изготовлена, но, поскольку изображения не заменяют тактильную информацию, необходимо получить векторы горизонтального смещения из вычисления изображений. Однако при совершенствовании компьютеров в последнее время проблема вычислений по существу была решена, и в реальном примере время, требующееся для получения распределения вектора силы с момента взятия изображения, составляло менее 100 мкс (при использовании компьютера Pentium III 800 МГц). Это время по существу пропорционально площади контактной поверхности, которая рассматривается.
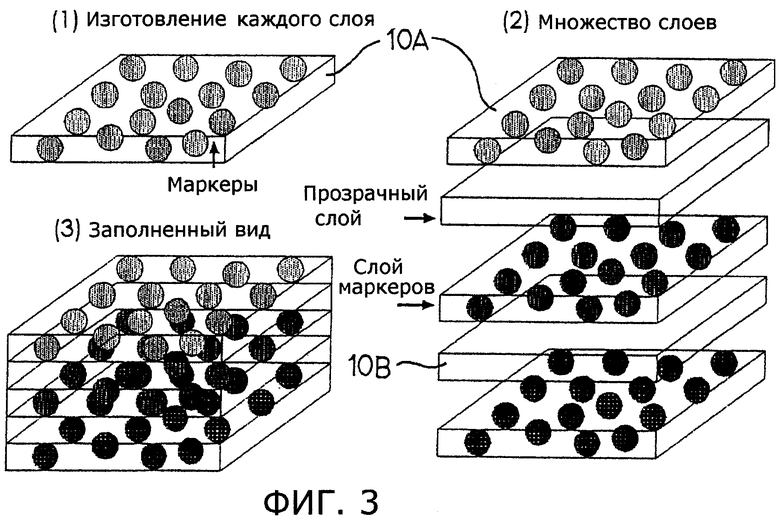
Ниже описан процесс изготовления датчика первого варианта реализации.
Прежде всего изготавливается каждый слой, смешанный с окрашенными микроскопическими сферами. Чтобы предотвратить любое воздействие маркеров на деформацию корпуса датчика, они изготавливаются с добавление пигмента к гибкому корпусу, который является таким же, как и основной корпус. Возможно изготовить маркеры из другого материала, имеющего такие же эластичные свойства. Может использоваться любой другой материал, поскольку размер маркеров является достаточно малым, чтобы определить, что возможно пренебречь любыми воздействиями на деформацию корпуса датчика. Форма маркеров является сферической, и толщина слоев такая же, как диаметр маркеров. При этом маркеры одного и того же цвета находятся на одной и той же глубине.
Далее изготавливаются каждый слой 10А маркеров (отдельный гибкий корпус, имеющий распределение маркеров) и прозрачный слой 10В (отдельный гибкий корпус без маркеров). В случае, когда гибкий корпус является самоклеящимся, возможно использовать прозрачный слой как связующий материал, но также возможно формировать слои при использовании прозрачного связующего вещества, которое имеет слабое воздействие на отдельные гибкие корпуса. Показано три слоя 10А маркеров, но плотность распределения маркеров выше при продвижении от верхнего слоя к нижнему слою (т.е. при продвижении от стороны, расположенной ближе к камере, к стороне, расположенной дальше от камеры). Размер описанных маркеров определяется требуемым разрешением. В качестве примера возможно рассмотреть случай использования тактильного датчика для манипулятора (руки робота). Диаметр сферических маркеров в этом примере составляет от 0,1 мм до 0,2 мм.
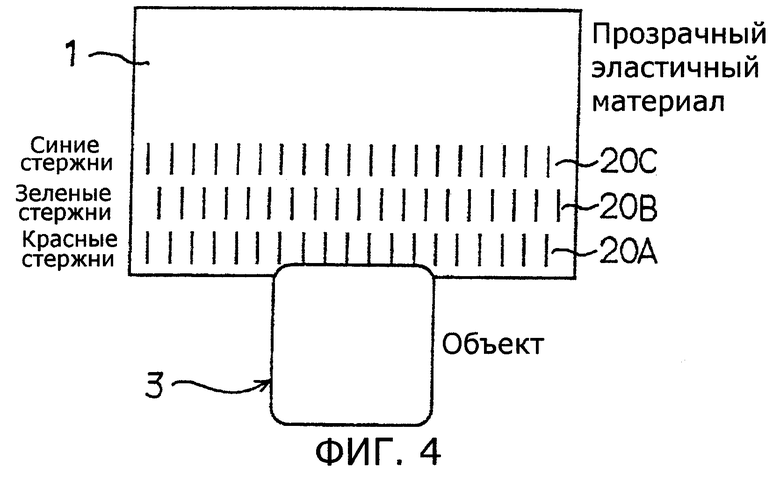
Второй вариант реализации изобретения описан со ссылками на фиг.4 и фиг.5. Во втором варианте реализации изобретения маркеры представляют собой исключительно тонкие цилиндры или колонны, имеющие микроскопические поперечные сечения. На чертежах маркеры размещены вертикально внутри прозрачного гибкого корпуса. Маркеры расположены вдоль воображаемых линий, связывающих объект, приходящий в контакт с гибким корпусом, и камеру. Группа маркеров формируется в гибком корпусе 2 путем размещения большого количества маркеров в рядах на определенной глубине, причем маркеры располагают на трех ступенях на разной глубине. Группа маркеров 20А, составленная из исключительно тонких красных цилиндрических маркеров, монтируется в самой неглубокой части по отношению к поверхности гибкого корпуса 1, с которой контактирует объект 3, группа маркеров 20В, составленная из исключительно тонких зеленых цилиндрических маркеров, монтируется в части, которая располагается глубже, чем слой, в котором смонтирована группа маркеров 20А, и группа маркеров 20С, составленная из исключительно тонких синих цилиндрических маркеров, монтируется в части, которая располагается глубже, чем часть, в которой располагается слой, в котором монтируется группа маркеров 20В.
На фиг.4 камера не показана, но камера располагается так, что обращена к поверхности, противоположной поверхности, которой касается объект 3. Таким образом, трехступенчатые группы маркеров являются закодированными по цвету для соответствующих различных цветов, а на чертеже они имеют цветовое кодирование следующих цветов: синий, зеленый, красный. Но цвета маркеров не ограничиваются этим, а поскольку они могут быть идентифицированы камерой, маркеры могут быть любого цвета. Каждый из маркеров, составляющих группы маркеров 20А, 20В и 20С, смонтированные в каждом слое, предпочтительно не перекрывается с другими между слоями (в направлении вверх и вниз).
Каждый маркер из группы маркеров имеет микроскопическое поперечное сечение. Это означает, что обычно невозможно видеть что-либо при наблюдении со стороны камеры, расположенной на верхней стороне чертежа. Если деформация сдвига происходит на месте расположения маркера при контакте с объектом, маркеры будут иметь наклон (располагаться под углом), пропорциональный деформации сдвига, т.е. становится возможным наблюдать цвет маркера в прозрачном гибком корпусе при наблюдении сверху.
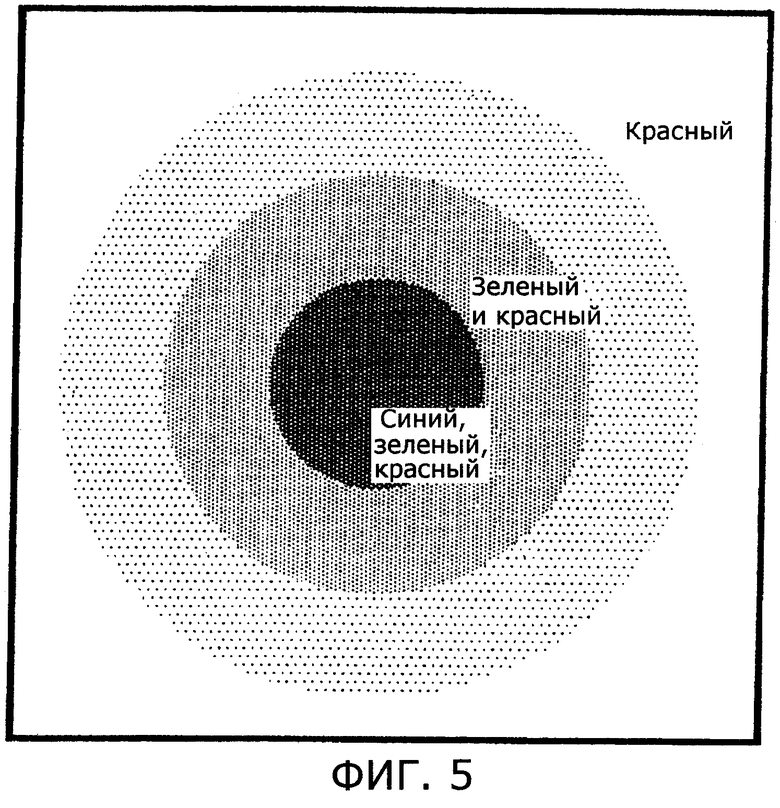
В этом варианте реализации из-за того, что группы маркеров располагаются с учетом цветового кодирования в направлении вглубь, наблюдаются цвета, соответствующие деформации сдвига на этой глубине. В случае, когда объект просто нажимает на гибкий корпус, наблюдается картина радуги (фиг.5) в контактной точке в центре. Это представляет только изменение деформации сдвига, соответствующее глубине, и возможно разделить компоненты давления, действующего на контактную поверхность, на вертикальную и горизонтальную составляющие и осуществить их измерение. Для известного тактильного датчика давление на контактную поверхность вычисляется в предположении, что оно действует только в вертикальном направлении, так как ослабление деформации сдвига, которое происходит в направлении вглубь гибкого корпуса, отличается для вертикального давления и горизонтального давления. Возможно разделить и определить два типа давления путем наблюдения изменения деформации сдвига в направлении вглубь.
В случае, когда контактная поверхность является вибрирующей, узлы и пучности вибрации возникают внутри гибкого корпуса в зависимости от типа вибрации (такого, как вибрация зданий). Маркеры в узлах подвергаются воздействию максимальной деформации сдвига, и поэтому существует большой наклон. При наблюдении изображения становится возможным установить тип вибрации внутри гибкого корпуса, а также частоту вибрации.
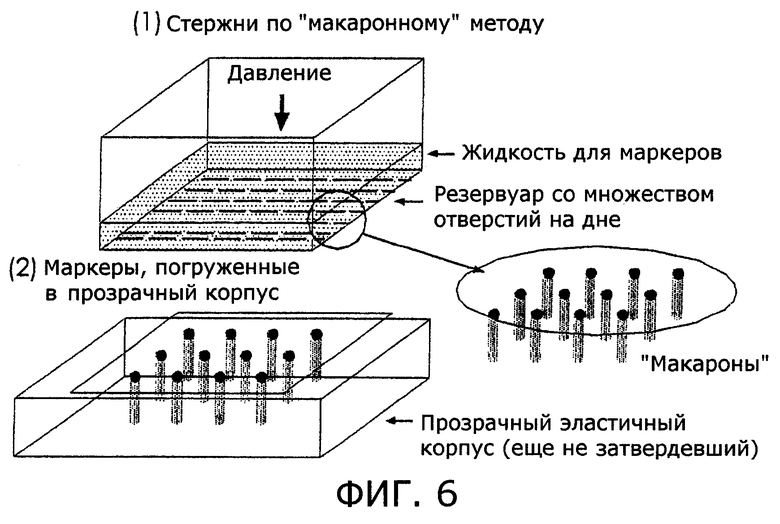
Далее описан процесс изготовления датчика второго варианта реализации изобретения (фиг.6). Исходный раствор из окрашенных маркеров помещается в контейнер, имеющий множество микроскопических отверстий на дне, и формируются цилиндры с высоким относительным удлинением путем штамповки выдавливанием. Диаметр поперечного сечения исключительно тонких маркеров составляет 0,1-0,5 мм, и длина больше диаметра в 10-100 раз. Маркеры располагаются в исходном растворе прозрачного гибкого корпуса перед установкой. Этот процесс может быть комплексным, и окрашенные маркеры могут штамповаться выдавливанием в исходный раствор прозрачного гибкого корпуса. После того как раствор установлен, выполняются срезы определенной толщины. Это выполняется для всех по-разному окрашенных маркеров, и датчик формируется с образованием многослойной структуры.
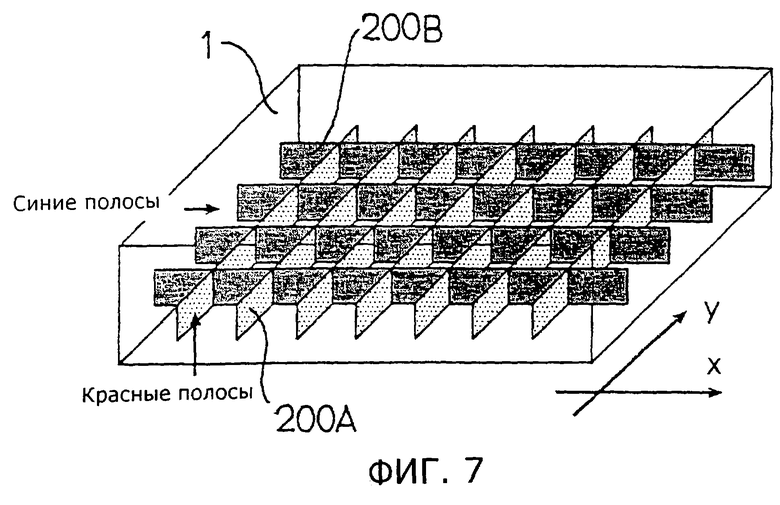
На фиг.7 представлен третий вариант реализации настоящего изобретения. Исключительно тонкие полосы используются в качестве маркеров (например, около 0,001 мм). Большое количество полос располагается рядами параллельно для составления группы маркеров. Группы маркеров с отличающимся цветовым кодированием располагаются под другим углом по отношению к первой группе маркеров. В качестве одного из предпочтительных вариантов две группы маркеров 200А (группа маркеров, содержащая множество тонких красных полос, расположенных в ряд) и 200В (группа маркеров, содержащая множество тонких синих полос, расположенных в ряд) располагаются таким образом, что соответствующие маркеры ортогональны друг другу, но пространственное соотношение для расположения множества групп маркеров не ограничивается. Также возможно, что две стороны полос, составляющих маркер, имеют разные цвета.
Маркеры в форме полос размещаются внутри прозрачного гибкого корпуса в форме прямоугольного параллелепипеда 1, имеющего определенную толщину. Маркеры в форме полос располагаются перпендикулярно по отношению к поверхности гибкого корпуса 1, которой касается объект, при этом камера обращена к поверхности, которая противоположна поверхности, которой касается объект 3. Так как маркеры в форме полос являются исключительно тонкими, обычно невозможно видеть что-либо при наблюдении сверху (от камеры). Если деформация сдвига возникает в местах расположения маркеров при контакте с объектом, маркеры наклоняются пропорционально давлению, и становится возможным увидеть цвета в прозрачном гибком корпусе, аналогично первому варианту реализации.
Так как маркеры располагаются рядами в разных направлениях при наличии цветового кодирования, цвет, который появляется, уже содержит информацию о направлении давления. Например, когда существует деформация в направлении х, появляется красный цвет, и в части, где деформация происходит под углом 90 градусов по отношению к первой, появляется синий цвет. В ряде мест возможно увидеть промежуточные цвета, которые являются смесью используемых цветов, и, если видны красный и синий цвет на выходе цветной камеры, это непосредственно составляет Х и Y компоненты деформации сдвига. В задаче закрепления (транспортировки удерживаемого объекта без его падения), которая является существенной основной задачей для манипулятора (руки робота), возможно оценить силу трения, получаемую на контактной поверхности путем наблюдения, в каком направлении действует деформация сдвига, и осуществления возможного предупреждения применения в этом направлении.
Также возможно рассмотреть маркеры не прямо сверху, а из положения под небольшим углом. В этом случае сначала будут наблюдаться цвета, потому что окрашенные слои имеют наклон. Нулевой точки (состояния, когда окрашенные слои являются вертикальными и не имеют цвета) избегают путем сдвига, который создается наклоном. Так как наблюдается только одна сторона окрашенных слоев, нет необходимости иметь различные цвета на передней и задней сторонах. Структура, показанная на фиг.7, может быть также выполнена в виде слоев для формирования датчика.
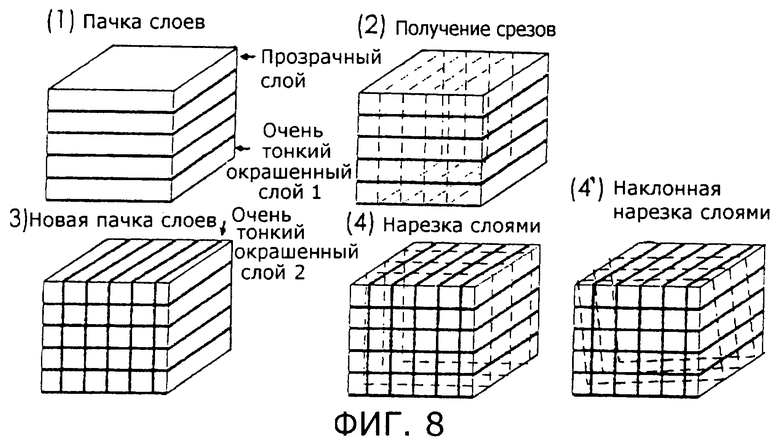
На фиг.8 представлен пример способа изготовления датчика третьего варианта реализации изобретения.
Изготавливаются слои для прозрачного гибкого корпуса и окрашенного гибкого корпуса. На стадии создания образца толщина прозрачного гибкого корпуса составляла 1 мм и окрашенных слоев 0,01 мм, но для того чтобы применять датчик для манипулятора (руки робота), предпочтительная толщина составляет 0,1 мм для прозрачного гибкого корпуса и 0,001 мм для окрашенных слоев.
Ламинированный корпус, полученный выше, разрезается в направлении, перпендикулярном направлению созданных слоев. Толщина среза предпочтительно такая же, как и толщина прозрачного гибкого корпуса.
Каждая срезанная полоса подсоединяется путем введения между полосами гибкого корпуса, который имеет окраску, отличную от цвета окрашенного гибкого корпуса. Так как силиконовая резина имеет самоклеящиеся свойства, если она используется, стадия присоединения является простой, но также возможно использовать специальный связывающий слой.
Ламинированный корпус обрезается вдоль поверхности, ортогональной двум ортогональным слоям (два гибких корпуса, имеющие различную окраску). Толщина среза зависит от использования или твердости гибкого корпуса, но, если расстояние между ламинированными окрашенными слоями принимается равным 1, может рассматриваться толщина среза, которая составляет от 1 до 20. На предыдущей стадии изготовления также возможно сделать срез под углом, как показано поз. (4'). В этом случае, если наблюдение проводится прямо сверху, возможно наблюдать цвет, потому что окрашенные слои сразу являются наклоненными. Т.е. сдвиг устанавливается для того, чтобы избежать нулевой точки (состояния, когда окрашенные слои являются вертикальными, и цвет не наблюдается), и, следовательно, нет необходимости создавать отдельные цвета на двух сторонах окрашенных слоев.
Четвертый вариант реализации представляет собой усовершенствование третьего варианта реализации. Наибольшая проблема, когда полосы располагаются рядами, состоит в том, что стадия изготовления является сложной. Способ упрощения изготовления при сохранении тех же возможностей датчика - это так называемый «ступенчатый метод», как описывается далее. Создается поверхность раздела ступенчатой формы (фиг.15) (части гибкого корпуса составляют маркеры). Благодаря ступенчатой форме поверхность раздела может разделяться на две группы поверхностей, причем все поверхности в группе имеют одно и то же направление. Поверхности в каждой группе делаются одного и того же цвета (здесь они являются красными и синими). Изображение сверху становится таким, как показано на фиг.16. Если ширина каждой полосы существенно тоньше, чем один пиксель на элементе формирования изображения, цвета двух полос смешиваются и наблюдаются как изображение единого цвета. Если происходит касание корпуса датчика, соответствующий наклон полос изменяется, но он наблюдается как изменение цвета. В случае, когда к контактной поверхности прикладывается горизонтальная сила (фиг.16(b)), каждая полоса испытывает вращательное движение в соответствующих положениях, и, как результат, на изображении сверху одна из групп поверхностей выглядит так, что она сжата, в то время как другая группа поверхностей выглядит так, что она растянута. Это выглядит как изменение соотношения двух цветов. Если вертикальная сила прикладывается к контактной поверхности (фиг.16(с)), наклон полос изменяется аналогично, но не существует изменения в соотношении двух цветов, а существует изменение в яркости изображения. Так как «разность» и «сумма» яркости для каждого цвета (красного и синего) изменяется благодаря компонентам силы в горизонтальном направлении и вертикальном направлении, возможно получать величины, которые содержат вертикальные и горизонтальные компоненты векторов силы в конкретной точке, в виде информации яркости двух цветов в той точке. При определении величин возможно восстановить поверхностное распределение векторов силы. Можно сказать, что эта система является такой же, как ранее описанный тип датчика с полосами, в котором наклон поверхностей играет фундаментальную роль, но она имеет преимущество по сравнению с предыдущим датчиком с полосами с точки зрения изготовления, состоящее в том, что ступенчатые поверхности могут быть изготовлены в одном процессе путем заполнения формы неразбавленным силиконом. Для упрощения был описан способ с использованием двух цветов. Как показано на фиг.17, при использовании так называемого «пирамидального изготовления», когда микроскопические кубики собираются на нижней поверхности, если три группы поверхностей, обращенных в одном направлении, изготовлены так, что они имеют одинаковый цвет (например, красный, зеленый и синий), то аналогично предыдущему описанию возможно получать две степени свободы для силы, действующей в горизонтальном направлении на контактной поверхности как соотношение яркости для трех цветов, и силы, действующей в вертикальном направлении, при использовании полной яркости трех цветов.
Ниже описан способ окрашивания маркеров и использование световых источников. При окрашивании каждой группы поверхностей, имеющих разный наклон (фиг.15 и фиг.17), возможно распылять краску с направления, перпендикулярного каждой поверхности (фиг.18). Поскольку каждая поверхность становится меньше и меньше, окрашивание является особенно сложным, поскольку размер частиц, содержащихся в краске, приближается к размеру поверхностей. Могут быть рассмотрены два способа для преодоления этих трудностей. Прежде всего, на ступенчатую поверхность наносится фоточувствительный материал, который приобретает цвет под действием света, и поверхность избирательно подвергается воздействию света при этом наклоне, используется горизонтально направленный свет, идущий в вертикальном направлении по отношению к каждой поверхности. Этот способ используется для микрообработки на силиконовых пластинах. Другой более простой способ включает формирование каждой поверхности как полностью рассеивающей белой поверхности, освещение каждого цвета светом, используемым в качестве датчика, с направлений, перпендикулярных каждой поверхности, и наблюдение рассеянного отраженного света (фиг.19). При использовании этого способа, так как возможно сначала окрашивать силикон неразбавленным белым при формировании ступенчатых поверхностей, процесс изготовления становится особенно простым. Перекрестное искажение между каналами каждого цвета уменьшается путем настройки интенсивности каждого светового источника в ходе использования его в качестве датчика, и достигается более высокая точность определения.
Сущность ступенчатого метода состоит в том, что вращательное движение каждой точки ступенчатой части соответствует разнице в яркости каждого цвета, в то время как сжатие в вертикальном направлении соответствует среднему наклону каждой поверхности, а именно сумме яркостей каждого цвета. Но существует проблема, состоящая в том, что чувствительность для сжатия по направлению вверх и вниз слабо сравнима с чувствительностью для вращательного движения. Однако возможно улучшить чувствительность для смещения вверх и вниз с помощью следующих нескольких модификаций.
На фиг.20 световод представляет собой пленку из того же материала, что и корпус датчика или какой-либо жесткий прозрачный гибкий корпус, и имеет толщину 0,5-1 мм. Белый свет от источника белого света подводится к этому световоду, свет заполняет внутреннюю часть световода в соответствии с принципом полного отражения точно так же, как для оптического волокна, и можно сформировать состояние, когда свет не выходит наружу. При этом на каждой ступенчатой поверхности прозрачного гибкого корпуса ступенчатого типа, описанного выше, прозрачный гибкий элемент, составляющий цветной светофильтр, который пропускает только красный и синий цвет, располагается в световоде со ступенчатой поверхностью по направлению вниз. Этот цветовой светофильтр может быть сформирован при использовании такого же процесса, как для окрашенной поверхности, описанной ранее. Эта система датчика приходит в контакт с объектом через световод. Когда контакта нет, не существует контакта между световодом и ступенчатой поверхностью, и изображение камеры остается темным. Однако, если контакт между световодом и вершиной ступенчатой поверхности появляется из-за контакта с объектом, белый свет, который заполняет внутреннюю часть световода, проходит через цветной светофильтр ступенчатой поверхности и изображается как окрашенный свет.
На фиг.21 показано это состояние. В зависимости от направления распределения вектора силы, действующей на поверхность световода, изменяется контактное состояние между ступенчатой поверхностью и световодом. В случае вертикально действующей силы (правая сторона фиг.21), так как вершина ступени деформируется с левой, правой симметрией, изображение получается с красным и синим цветами, смешанными в одинаковой степени. Яркость изображения представляет вертикальное сопротивление. В случае силы, действующей близко к горизонтали, ступенька приобретает боковую деформацию, и асимметрия возникает при контакте между световодом и каждой поверхностью ступенчатых поверхностей. Эта асимметрия, т.е. соотношение красного и синего, обозначает силу в горизонтальном направлении.
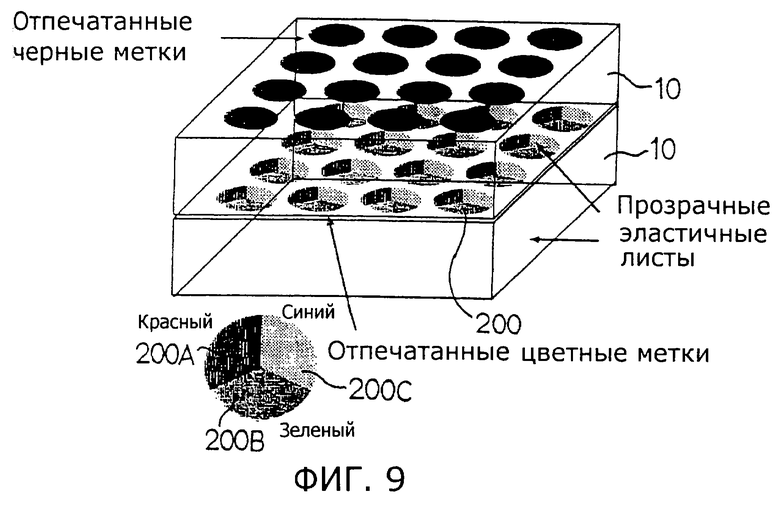
Разность и сумма яркости для каналов каждого цвета представляет собой объекты восприятия так же, как описано выше, но в этом случае имеются два преимущества. Во-первых, чувствительность по отношению к силе, действующей в вертикальном направлении, значительно улучшается. Во-вторых, по сравнению с первоначально описанным датчиком, где получается изображение, которое имеет определенную яркость по сравнению с первоначальным состоянием при отсутствии контакта, динамический диапазон датчика вплоть до насыщения элементов камеры (отношение максимального сигнала к минимальному сигналу может быть обработано с помощью устройства) является узким, что связано с ухудшением точности тактильного датчика, так как датчик этого варианта реализации обычно имеет темное изображение в начальном состоянии, когда нет контакта. Существует преимущество, состоящее в том, что динамический диапазон самих пикселей телекамеры на приборах с зарядовой связью может эксплуатироваться в существенной степени. Далее описан пятый вариант реализации. В этом варианте стереоскопические маркеры не формируются, а печатаются на поверхности прозрачного гибкого корпуса и они аккуратно перекрываются и соединяются. На фиг.9 показаны две перекрывающиеся стадии, но число стадий не ограничивается двумя стадиями, и любое число стадий является возможным.
Датчик формируется путем ламинирования одинарных гибких корпусов 10, имеющих форму прямоугольных параллелепипедов и определенную толщину. Контакт датчика с объектом происходит снизу, а фотографируется сверху с помощью камеры, объект контактирует с нижней поверхностью находящегося в нижнем слое одинарного гибкого корпуса 10. Множество совершенно круглых плоских маркеров 200 создается на верхней поверхности находящегося в нижнем слое одинарного гибкого корпуса. Круглые маркеры 200 подразделяются на три от центра круга для разделения их на три части в форме веера 200А, 200В и 200С. Каждая часть имеет разный цвет, в этом варианте реализации - красный, зеленый и синий. Форма маркеров не ограничивается круглой, и количество нанесенных на них цветов не ограничивается тремя, два цвета или четыре или более цветов также являются возможными. Диаметр плоских маркеров составляет 1-2 мм в одном примере.
Черные скрывающие маркеры 6, имеющие такой же размер и такую же форму, как круглые маркеры 20, создаются на верхней поверхности содержащегося в верхнем слое одинарного гибкого корпуса 10. При наблюдении через камеру (сверху) скрывающие маркеры 6 полностью перекрывают круглые маркеры 20, и содержащиеся в верхнем и нижнем слое одинарные гибкие корпуса 10 затем ламинируются и соединяются.
Обычно нижний слой окрашенных маркеров 20 заслоняется находящимися в верхнем слое скрывающими маркерами 6 и не может быть виден, но если возникает деформация сдвига, положения скрывающих маркеров 6 и окрашенных маркеров 20 смещаются, окраска становится видимой. В указанном датчике маркеры покрываются красками трех цветов: красный, зеленый, синий, и возможно узнать направление деформации из полученных цветов.
Промышленная применимость
Настоящее изобретение может широко применяться для тактильных датчиков и может использоваться в тактильном датчике для манипулятора (руки робота).
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ ТАКТИЛЬНЫЙ ДАТЧИК И СПОСОБ ВОССТАНОВЛЕНИЯ РАСПРЕДЕЛЕНИЯ ВЕКТОРА СИЛЫ С ИСПОЛЬЗОВАНИЕМ УКАЗАННОГО ДАТЧИКА | 2004 |
|
RU2358247C2 |
| ОПТИЧЕСКИЙ ТАКТИЛЬНЫЙ ДАТЧИК | 2005 |
|
RU2371686C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕКТОРА СИЛЫ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКОГО ТАКТИЛЬНОГО ДАТЧИКА | 2004 |
|
RU2354943C2 |
| СЕНСОРНАЯ СИСТЕМА | 2018 |
|
RU2698958C1 |
| ЛИНЕЙНЫЙ СВЕТОДИОДНЫЙ МОДУЛЬ | 2003 |
|
RU2253887C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОЦЕНКИ ПЛОТНОСТИ И НЕОДНОРОДНОСТИ БИОЛОГИЧЕСКОЙ ТКАНИ | 2005 |
|
RU2299011C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ОСВЕТИТЕЛЬ | 2002 |
|
RU2244871C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ТОЧКИ ВЗГЛЯДА НАБЛЮДАТЕЛЯ | 2011 |
|
RU2565482C2 |
| ПРОЕКЦИОННОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ ВИДЕОИНФОРМАЦИИ НА СОСТАВНОМ ПРОСВЕТНОМ ЭКРАНЕ | 2010 |
|
RU2455671C2 |
| УСТРОЙСТВО БЕСТЕНЕВЫХ ОСВЕЩЕНИЙ | 2008 |
|
RU2370700C1 |
Изобретение относится к измерительной технике, в частности к тактильным датчикам оптического типа. Устройство содержит тактильную часть и средство формирования изображения, причем тактильная часть содержит прозрачный гибкий корпус и множество групп маркеров, расположенных внутри гибкого корпуса. Каждая группа маркеров составляется из множества окрашенных маркеров, при этом маркеры, составляющие различные группы, имеют различную окраску в каждой группе, поведение окрашенных маркеров в том случае, когда объект касается гибкого корпуса, фотографируется с помощью средства формирования изображения. Предпочтительно разные группы маркеров имеют различное пространственное расположение. Измерение осуществляется путем многоканального считывания, которое использует цветной или оптический спектр для оптического тактильного датчика для получения информации для множества степеней свободы в каждой точке на поверхности. 3 н. и 29 з.п. ф-лы, 21 ил.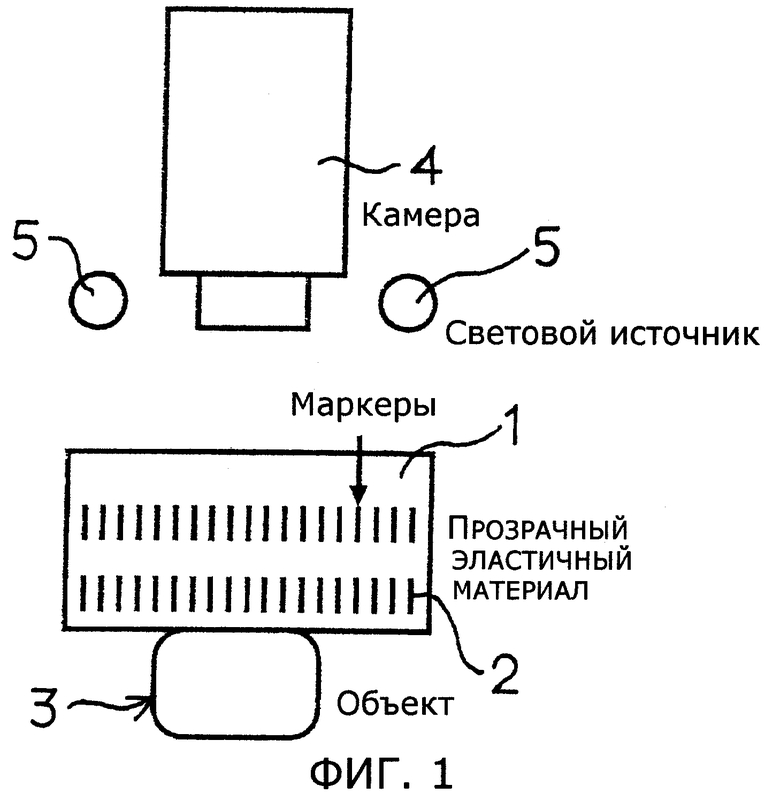
| JP 2000227371 А 15.08.2000 | |||
| JP 61205831 А 12.09.1986 | |||
| JP 62115308 А 27.05.1987 | |||
| JP 3135704 А 10.06.1991 | |||
| СПОСОБ ИСПОЛЬЗОВАНИЯ ЩЕЛОЧНЫХ МЕТАЛЛОВ: НАТРИЯ, КАЛИЯ НЕПОСРЕДСТВЕННО В КАЧЕСТВЕ ТОПЛИВА В ДВИГАТЕЛЯХ ВНУТРЕННЕГО СГОРАНИЯ И КОТЕЛЬНЫХ УСТАНОВКАХ | 2001 |
|
RU2198306C2 |
| Тактильный датчик для устройств распознавания образов | 1985 |
|
SU1288730A1 |

