Изобретение относится к области измерительной техники, в частности к сенсорным тактильным системам для диагностирования (измерения) геометрических (в частности, угла наклона поверхности тела к ориентации тактильного элемента), трибологических (в частности, анизотропных коэффициентов трения) и физико-механических (в частности, твердость, жесткость) характеристик поверхности тела по результатам измерения результирующих (приведенных к центру рабочей контактной поверхности тактильного элемента, в частности, торцевого сечения «ворсинки») сил и моментов и может быть использовано в контрольно-измерительной технике и в системах «очувствления» робототехнических в аэрокосмической технике.
Известна сенсорная система (Patent US 6399939 B1. Sensor array system / Mannur J. Sundaresan, Anindya Ghoshal, Mark J. Schulz. - Опубл. 4 июня 2002 г.) с сетью из линейных пьезоэлементов различных поляризаций, которые связаны между собой сложной системой токопроводов. Информативные электрические сигналы от пьезоэлементов суммируются и, далее, в виде одиночного интегрального выходного сигнала направляется к приемнику-анализатору. Специальная система локальных процессоров для включения/выключения ячеек из сети чувствительных элементов позволяет датчику автоматически адаптироваться к условиям эксплуатации, локализовать вероятностное расположение диагностируемого события.
Недостатком известного устройства является низкая точность диагностирования характеристик поверхности, что обусловлено низкой пространственной разрешимостью, невозможностью учесть особенности сложного объемного напряженного состояния «тактильной поверхности» и неоднозначность решения обратных краевых задач механики.
Известна сенсорная система (патент RU №2263885. Оптический тактильный датчик/Тати С., Кадзимото X.), содержащая тактильную часть и средство формирования изображения, причем тактильная часть содержит прозрачный гибкий корпус и множество групп маркеров, расположенных внутри гибкого корпуса. Каждая группа маркеров составляется из множества окрашенных маркеров, при этом маркеры, составляющие различные группы, имеют различную окраску в каждой группе, поведение окрашенных маркеров в том случае, когда объект касается гибкого корпуса, фотографируется с помощью средства формирования изображения. Измерение осуществляется путем многоканального считывания, которое использует цветной или оптический спектр для оптического тактильного датчика для получения информации для множества степеней свободы в каждой точке на поверхности.
Недостатком известного устройства является низкая точность диагностирования характеристик поверхности, что обусловлено невозможностью точного определения сложной объемной неоднородной деформации корпуса посредством обработки фотоизображений расположенных в нем окрашенных маркеров.
Наиболее близкой конструкцией того же назначения к заявленному изобретению по совокупности признаков является сенсорная система (Gauthier D., Mueller A., White R. D., Manno V., Rogers C., Hooper D., Anjur S., Moinpour M. Micromachined Lateral Force Sensors for Characterization of Microscale Surface Forces During Chemical Mechanical Polishing // Mater. Res. Soc. Symp.Proc. Draft. - MRS Proceedings, 2008 http://www.academia.edu/15631913/Micromachined_Lateral_Force_Sensors_for_Characteriza_tion_of_Microscale_Surface_Forces_During_Chemical_Mechanical_Polishing), состоящая из тактильной и регистрирующей подсистем. Тактильная подсистема состоит из корпуса и единообразно прикрепленных своими торцами к внутренней (обращенной к диагностируемой поверхности) поверхности корпуса однотипных консольных тактильных упругих элементов (или «ворсинок», в частности цилиндрической формы), свободные торцы которых являются рабочими «контактными» (соприкасающимися с диагностируемой поверхностью) поверхностями, а регистрирующая подсистема - высокоскоростной фотовидеорегистратор, который фиксирует (с обратной гладкой и без «ворсинок» стороны прозрачного корпуса) и обрабатывает характеристики информативного деформирования тактильных элементов «ворсинок». Данная система принята за прототип.
Признаки прототипа, совпадающие с существенными признаками заявляемого изобретения, - сенсорная система, содержащая тактильную и регистрирующую подсистемы; тактильная подсистема включает корпус и прикрепленные к внутренней, обращенной к диагностируемой поверхности корпуса однотипные упругие тактильные элементы, образующие тактильный слой; поверхности тактильных элементов, контактирующие с диагностируемой поверхностью, образуют рабочую тактильную поверхность; регистрирующая подсистема включает фотовидеорегистратор.
Недостатками известной конструкции, принятой за прототип, являются:
- невысокая точность диагностирования характеристик поверхности, обусловленная сложностью «расшифровки» информативных фотовидеоизображений, полученных подсистемой внешней высокоскоростной фотовидеорегистрации;
- значительные размеры, обусловленные удаленным расположением подсистемы внешней высокоскоростной фотовидеорегистрации от тактильной подсистемы: корпуса и системы тактильных элементов датчика не позволяют сенсорной системе диагностировать поверхность в областях, недоступных для внешней высокоскоростной фотовидеорегистрации.
Задачей изобретения является повышение точности диагностирования характеристик поверхности, уменьшение размеров (миниатюризация) конструкции сенсорной системы, достижение возможности сенсорной системы диагностирования поверхности в областях, недоступных для внешней высокоскоростной фотовидеорегистрации.
Поставленная задача была решена за счет того, что в известной сенсорной системе, содержащей тактильную и регистрирующую подсистемы, тактильная подсистема включает корпус и прикрепленные к внутренней, обращенной к диагностируемой поверхности корпуса однотипные упругие тактильные элементы, образующие тактильный слой, при этом поверхности тактильных элементов, контактирующие с диагностируемой поверхностью, образуют рабочую тактильную поверхность, регистрирующая подсистема включает фотовидеорегистратор, согласно изобретению регистрирующая подсистема дополнительно содержит оптоволоконный датчик объемного напряженного состояния, внедренный в приповерхностный слой корпуса вблизи мест закреплений упругих тактильных элементов.
В частности, оптоволоконный датчик размещен в приповерхностном слое корпуса в виде непрерывной спирали вблизи мест закреплений тактильных упругих элементов на внутренней поверхности корпуса.
В частности, корпус имеет пьезоэлектрический и/или магнитострикционный слой с функцией пьезоактюатора для обеспечения вибрационных нормальных и тангенциальных к диагностируемой поверхности тела смещений и появления информативных контактных усилий между тактильной поверхностью тактильных упругих элементов и диагностируемой поверхностью.
В частности, корпус имеет «интеллектуальный» слой с управляемой геометрией, адаптирующейся к особенностям диагностируемой поверхности, с функцией поворота и изменения главных кривизн тактильного слоя и тактильной поверхности.
Признаки заявляемого технического решения, отличительные от прототипа, - регистрирующая подсистема дополнительно содержит оптоволоконный датчик объемного напряженного состояния, внедренный в приповерхностный слой корпуса вблизи мест закреплений тактильных упругих элементов; оптоволоконный датчик размещен в приповерхностном слое корпуса в виде непрерывной спирали вблизи мест закреплений тактильных упругих элементов на внутренней поверхности корпуса; корпус имеет пьезоэлектрический и/или магнитострикционный слой с функцией пьезоактюатора для обеспечения вибрационных нормальных и тангенциальных к диагностируемой поверхности тела смещений и появления информативных контактных усилий между тактильной поверхностью тактильных упругих элементов и диагностируемой поверхностью; корпус имеет «интеллектуальный» слой с управляемой геометрией, адаптирующейся к особенностям диагностируемой поверхности, с функцией поворота и изменения главных кривизн тактильного слоя и тактильной поверхности.
Отличительные признаки в совокупности с известными позволяют усовершенствовать подсистему регистрации сложных информативных деформирований тактильных упругих элементов, в результате чего повысить точность диагностирования характеристик поверхности, уменьшить (миниатюризировать) размеры сенсорной системы, достигнуть возможности сенсорной системы диагностирования поверхности в областях, недоступных для внешней высокоскоростной фотовидеорегистрации.
Заявителю неизвестно использование в науке и технике отличительных признаков сенсорной системы с достижением указанного технического результата.
Сенсорная система иллюстрируется чертежами, представленными на фиг. 1 -6.
На фиг. 1 изображена сенсорная система со спиральным расположением оптоволоконного датчика вблизи мест закреплений дискретных консольных призматических тактильных элементов.
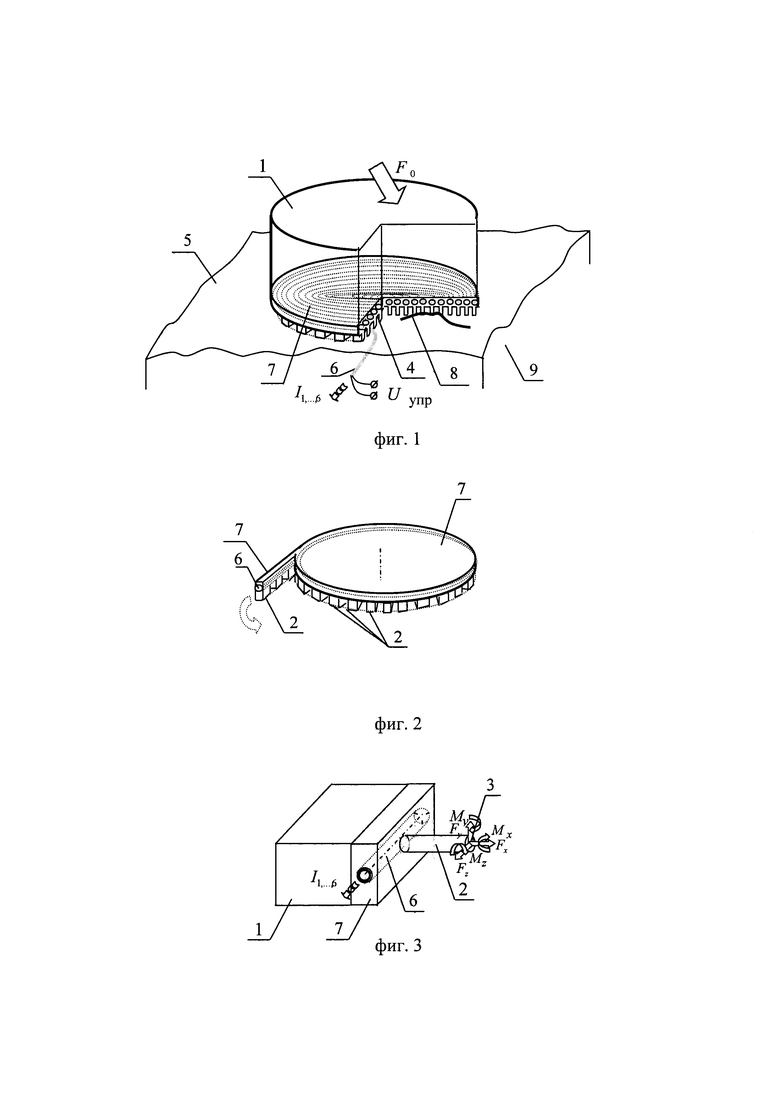
На фиг. 2 изображена схема спиральной ленточной «намотки» тактильного слоя.
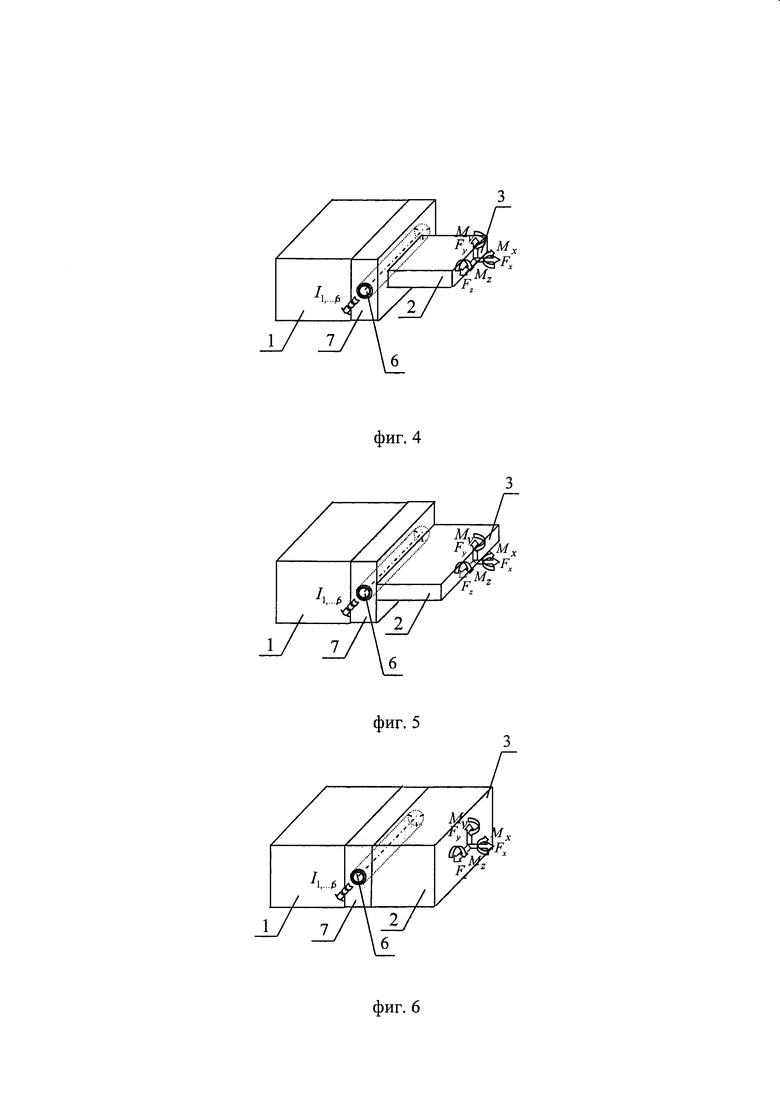
На фиг. 3-6 изображены элементарные фрагменты тактильного слоя (или «ячейки периодичности» ленты (см. фиг. 2) для спиральной намотки тактильного слоя) с искомыми информативными обобщенными усилиями на тактильной поверхности контакта с диагностируемой поверхностью; элементарные фрагменты на фиг. 3 - фиг. 6 являются расчетными схемами для нахождения передаточных коэффициентов сенсорной системы.
Сенсорная система (фиг. 1 - фиг. 6) состоит из тактильной и регистрирующей подсистем. Тактильная подсистема состоит из корпуса 1, однотипных упругих тактильных элементов, в частности, консольных элементов типа «ворсинок» 2, прикрепленных к внутренней поверхности корпуса 1, с тактильной поверхностью 3. Совокупность упругих тактильных элементов образует тактильный слой 4, при этом поверхность тактильного слоя 4, контактирующая с диагностируемой поверхностью 5, образует тактильную поверхность 3.
Регистрирующая подсистема включает фотовидеорегистратор (на чертежах не показан), оптоволоконный датчик 6 объемного напряженного состояния, внедренный в приповерхностный слой 7 корпуса 1 вблизи мест закреплений тактильных упругих элементов, в частности, консольных элементов типа «ворсинок» 2 и регистрирует совокупность распределенных вдоль, в частности, спиральной оси датчика информативных характеристик объемного напряженного состояния в приповерхностном слое 7. На фиг. 1 изображена локальная неровность 8 на диагностируемой поверхности 5 тела 9.
Оптоволоконный датчик 6 может быть размещен в приповерхностном слое 7 корпуса 1 в виде непрерывной спирали вблизи мест закреплений тактильных упругих элементов 2 на внутренней поверхности корпуса 1.
Корпус 1 может иметь пьезоэлектрический и/или магнитострикционный слой с функцией пьезоактюатора для обеспечения вибрационных нормальных и тангенциальных к диагностируемой поверхности 5 тела 9 смещений и появления информативных контактных усилий между рабочими тактильными поверхностями 3 упругих тактильных элементов 2 и диагностируемой поверхностью 5.
Корпус 1 может иметь «интеллектуалный» слой с управляемой геометрией, адаптирующейся к особенностям диагностируемой поверхности 5, с функцией поворота тактильного слоя 4 и изменения главных кривизн тактильного слоя 4 и тактильной поверхности 3, в частности, в виде фрагмента поверхности второго порядка, например, эллипсоидальной поверхности; при этом может быть использована обратная связь «интеллектуалного» слоя с подсистемой регистрации информативных деформационных характеристик упругих тактильных элементов 2.
Оптоволоконный датчик 6 объемного напряженного состояния, в частности, содержит оптоволокно, вдоль которого на боковой поверхности расположены измерительные двухслойные пьезоэлектрик/электролюминофор круговые секторные (в поперечном сечении) элементы с двумя управляющими электродами, при этом на выходе из оптоволокна располагается фотовидеорегистратор и пьезоэлектрические секторные элементы имеют различные некомпланарные (для трех произвольных) направления поляризаций.
Число «измерительных элементов» в оптоволоконном датчике 6 может быть различным и их число определяется количеством диагностируемых сенсорной системой характеристик диагностируемой поверхности 5, в частности, «трехэлементный» оптоволоконный датчик 6 для диагностирования анизотропного коэффициента трения диагностируемой поверхности 5 и «шестиэлементный» оптоволоконный датчик 6 для дополнительного уточненного определения геометрической формы неровностей 8 диагностируемой поверхности 5 тела 9.
Корпус 1 тактильной системы может быть как однородным, так и составным (композитным), в частности, со слоистой структурой из пьезоэлектрических слоев, при этом приповерхностный слой 7 корпуса 1 (в котором размещен оптоволоконный датчик 6) может иметь как отличные от других слоев свойства, так и равные, в частности, свойствам упругих тактильных элементов 2 датчика.
Приповерхностный слой 7 корпуса 1 может иметь внешнюю геометрическую форму спирали (в частности, с прямоугольным поперечным сечением), повторяющей спиральную форму расположенного внутри нее оптоволоконного датчика 6 с круговым поперечным сечением; результирующее поперечное сечение спирали приповерхностного слоя 7 с внедренным в нее оптоволоконным датчиком 6, в частности, имеет вид «круг в прямоугольнике» (для повышения точности регистрации информативных деформационных характеристик каждым локальным участком оптоволоконного датчика 6 от «своего» упругого тактильного элемента 2 в результате снижения «паразитных» влияний от «соседних» упругих тактильных элементов 2). Свойства и геометрия (топология) приповерхностного слоя 7 корпуса 1 и место расположения в нем оптоволоконного датчика 6 подбираются из условия независимости и наилучшей точности регистрации информативных деформационных характеристик упругих тактильных элементов 2, в частности, для каждой из «ворсинок» в отдельности.
Упругие тактильные элементы 2 типа «ворсинок» могут быть объединены, в частности, в тактильную спираль, повторяющую форму спирали оптоволоконного датчика 6 в приповерхностном слое 7 корпуса 1, или в тактильный слой 4 на приповерхностном слое 7 корпуса 1 для частных случаев диагностики, в частности, для нахождения анизотропных коэффициентов трения диагностируемой поверхности 5 о тактильную поверхность 3 тактильного слоя 4.
Оптоволоконный датчик 6 может работать в «резонансном режиме», в частности, при управляемых вынужденных осесимметричных колебаниях пьезоэлектрического слоя оптоволоконного датчика 6 (под воздействием переменного электрического напряжения на его управляющих электродах) для нахождения, в частности, температурного поля диагностируемой поверхности 5 или поля «микрозазоров» между тактильной поверхностью 3 и диагностируемой поверхностью 5 тела 9 с использованием известных зависимостей резонансной частоты колебаний «пьезорезонаторов» от температуры или от величины «начального зазора» между колеблющейся тактильной поверхностью 3 и ограничивающей эти колебания диагностируемой поверхностью 5.
Сенсорная система работает следующим образом.
Упругие тактильные элементы 2 приводятся в механический контакт (в частности, в результате действия «актюаторных» элементов корпуса или внешней силы F0 (см. фиг. 1 - фиг. 6) своими рабочими тактильными поверхностями 3 с неровностями 8 диагностируемой поверхности 5, в результате чего упругие тактильные элементы 2 соответствующим образом информативно деформируются и воздействуют соответствующими силовыми полями (в частности, «реактивными» значениями результирующих сил  и моментов
и моментов  ) на измерительные элементы оптоволоконного датчика 6 в приповерхностном слое 7 корпуса 1 вблизи мест закрепления, в частности, консольных упругих тактильных элементов 2. Измерительные элементы (в частности, в количестве шести элементов) оптоволоконного датчика 6 регистрируют (по результатам измерений на выходе из оптоволокна датчика 6 интенсивностей I1, …, 6 световых сигналов различной частоты ν1, …, 6 при варьировании значениями электрического напряжения uупр на управляющих электродах оптоволоконного датчика 5) эти информативные характеристики «реакций»: , в местах закрепления, в частности, консольных упругих тактильных элементов 2 и, далее, по этим характеристикам вычисляем искомые результирующие усилия F={Fx,Fy,Fz} и моменты М={Мх,Му,Mz}, действующие (т.е. «приведенные» к центру тактильной поверхности 3 свободного торцевого сечения консольного упругого тактильного элемента 2) со стороны соответствующего локального участка диагностируемой поверхности 5 на каждый упругий тактильный элемент 2 с использованием известных соотношений для осевой
) на измерительные элементы оптоволоконного датчика 6 в приповерхностном слое 7 корпуса 1 вблизи мест закрепления, в частности, консольных упругих тактильных элементов 2. Измерительные элементы (в частности, в количестве шести элементов) оптоволоконного датчика 6 регистрируют (по результатам измерений на выходе из оптоволокна датчика 6 интенсивностей I1, …, 6 световых сигналов различной частоты ν1, …, 6 при варьировании значениями электрического напряжения uупр на управляющих электродах оптоволоконного датчика 5) эти информативные характеристики «реакций»: , в местах закрепления, в частности, консольных упругих тактильных элементов 2 и, далее, по этим характеристикам вычисляем искомые результирующие усилия F={Fx,Fy,Fz} и моменты М={Мх,Му,Mz}, действующие (т.е. «приведенные» к центру тактильной поверхности 3 свободного торцевого сечения консольного упругого тактильного элемента 2) со стороны соответствующего локального участка диагностируемой поверхности 5 на каждый упругий тактильный элемент 2 с использованием известных соотношений для осевой  и поперечных
и поперечных 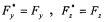 сил, крутящего
сил, крутящего  и изгибающих
и изгибающих  моментов, при этом координатная ось z совмещена с осью консольного упругого тактильного элемента 2,
моментов, при этом координатная ось z совмещена с осью консольного упругого тактильного элемента 2,  - длина консольного упругого тактильного элемента 2.
- длина консольного упругого тактильного элемента 2.
Подтверждение заявленного технического результата: повышение точности диагностирования характеристик поверхности, уменьшение размеров (миниатюризация) сенсорной системы, достижение возможности диагностирования сенсорной системой поверхности в областях, недоступных для внешней высокоскоростной фотовидеорегистрации, получено в результате проведенных численных экспериментов в программной системе конечно-элементного анализа ANSYS.
Численные экспериментальные испытания показали, что по сравнению с известным устройством, достигается достижение заявляемого технического результата сенсорной системы.
Изобретение относится к области измерительной техники, в частности к сенсорным тактильным системам для измерения геометрических, трибологических и физико-механических характеристик поверхности тела по результатам измерения результирующих сил и моментов и может быть использовано в контрольно-измерительной технике и в системах «очувствления» робототехнических в аэрокосмической технике. Сенсорная система содержит тактильную и регистрирующую подсистемы. Тактильная подсистема включает корпус и прикрепленные к внутренней, обращенной к диагностируемой поверхности корпуса однотипные упругие тактильные элементы, образующие тактильный слой. Поверхности тактильных элементов, контактирующие с диагностируемой поверхностью, образуют рабочую тактильную поверхность. Регистрирующая подсистема включает фотовидеорегистратор и оптоволоконный датчик объемного напряженного состояния, внедренный в приповерхностный слой корпуса вблизи мест закреплений упругих тактильных элементов. Техническим результатом изобретения является повышение точности диагностирования характеристик поверхности, уменьшение размеров (миниатюризация) конструкции сенсорной системы, достижение возможности сенсорной системы диагностирования поверхности в областях, недоступных для внешней высокоскоростной фотовидеорегистрации. 3 з.п. ф-лы, 6 ил.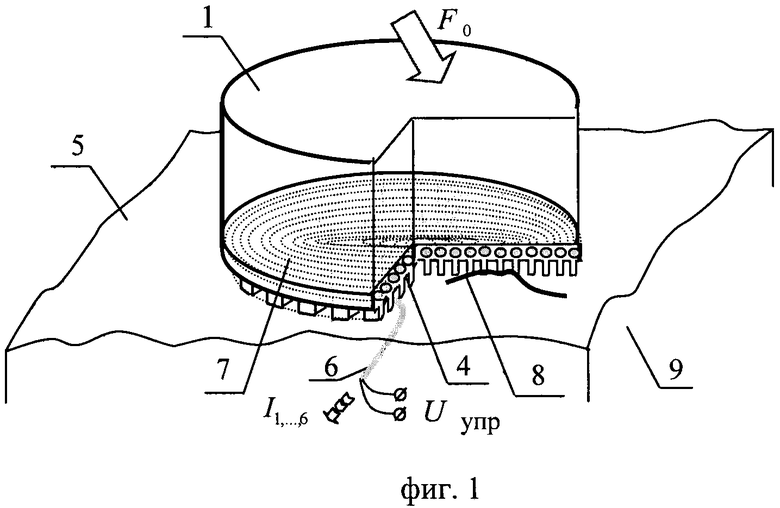
1. Сенсорная система, содержащая тактильную и регистрирующую подсистемы, тактильная подсистема включает корпус и прикрепленные к внутренней, обращенной к диагностируемой поверхности корпуса однотипные упругие тактильные элементы, образующие тактильный слой, при этом поверхности тактильных элементов, контактирующие с диагностируемой поверхностью, образуют рабочую тактильную поверхность, регистрирующая подсистема включает фотовидеорегистратор, отличающаяся тем, что регистрирующая подсистема дополнительно содержит оптоволоконный датчик объемного напряженного состояния, внедренный в приповерхностный слой корпуса вблизи мест закреплений упругих тактильных элементов.
2. Сенсорная система по п. 1, отличающаяся тем, что оптоволоконный датчик размещен в приповерхностном слое корпуса в виде непрерывной спирали вблизи мест закреплений упругих тактильных элементов на внутренней поверхности корпуса.
3. Сенсорная система по п. 1, отличающаяся тем, что корпус имеет пьезоэлектрический и/или магнитострикционный слой с функцией пьезоактюатора для обеспечения вибрационных нормальных и тангенциальных к диагностируемой поверхности тела смещений и появления информативных контактных усилий между тактильной поверхностью упругих тактильных элементов и диагностируемой поверхностью.
4. Сенсорная система по п. 1, отличающася тем, что корпус имеет «интеллектуальный» слой с управляемой геометрией, адаптирующейся к особенностям диагностируемой поверхности, с функцией поворота и изменения главных кривизн тактильного слоя и тактильной поверхности.
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ОБЪЕМНОГО НАПРЯЖЕННОГО СОСТОЯНИЯ | 2017 |
|
RU2643692C1 |
| СПОСОБ КОНТРОЛЯ ПРОЦЕССА ОБРАЗОВАНИЯ НАПРЯЖЕНИЙ В ЗАЛИВОЧНЫХ КОМПАУНДАХ | 0 |
|
SU303576A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СЛОЖНОГО НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ КОНСТРУКЦИИ, НАХОДЯЩЕЙСЯ ПОД СТАТИЧЕСКИМИ НАГРУЗКАМИ И ДИНАМИЧЕСКИМ НАГРУЖЕНИЕМ | 2011 |
|
RU2469261C1 |
| US 10139294 B2, 27.11.2018. | |||

