Изобретение относится к способам управления двоичными электромагнитными исполнительными механизмами, в частности, для управления узлами и агрегатами транспортных средств.
Из материалов к патенту DE 3920064, кл. Н 01 F (публ. 03.01.91) известен способ
управления электромагнитным клапаном состоящий из следующей последовательности действий: к обмотке возбуждения клапана параллельно подключают, по меньшей мере, два источника тока, один из которых задает амплитуду пускового, а другой амплитуду удерживающего токов, задают длительность импульса пускового тока, после истечения периода протекания пускового тока источник пускового тока отключают. До момента отключения клапана поддерживают удерживающий ток на заданном уровне.
Из материалов к патенту DE 3905937, кл. H 01 F (публ. 30.08.90) известен способ управления электромагнитным клапаном состоящий из следующей последовательности действий: увеличивают амплитуду протекающего через обмотку возбуждения электромагнитного клапана тока до значения пускового тока, после срабатывания клапана амплитуду протекающего через обмотку возбуждения электромагнитного клапана тока снижают до значения удерживающего тока. При этом в момент перехода клапана из режима питания пусковым током на режим питания удерживающим током подключают демпфирующее устройство, снижающее скорость изменения тока в обмотке возбуждения клапана. До момента отключения клапана поддерживают амплитуде удерживающего тока на заданном уровне.
Прототипом изобретения является известный из материалов к патенту патенту DE 4130711, кл. H 01 F (публ. 18.03.93) способ управления группой параллельно соединенных индивидуально управляемых электромагнитных клапанов небольшой мощности, состоящий из следующей последовательности действий: первоначально задают суммарную длительность импульса тока, протекающего через обмотку возбуждения электромагнитного клапана, и амплитуду пускового тока, затем определяют факт перехода одного из клапанов из состояния логического нуля в состояние логической единицы, снижают амплитуду тока до значения тока удержания и поддерживают ее в определенном поле допуска. Одновременно с изложенным контролируют максимально допустимую длительность импульса пускового тока.
К недостаткам вышеуказанных способов управления электромагнитным клапаном можно отнести необходимость изготовления клапана с неоправданно высоким запасом по тепловой мощности, при использовании клапана в широком диапазоне отрицательных и положительных температур окружающей среды, большие паразитные потери при использовании электромагнитных клапанов повышенной мощности, обусловленные необходимостью стабилизации питающего напряжения и, по меньшей мере, удерживающего тока, а также затрудненную диагностику работоспособности клапана.
Задачей изобретения было создание способа, обеспечивающего надежную эксплуатацию, диагностику и экономичное управление работающим от сети с нестабилизированным питающим напряжением в широком интервале отрицательных и положительных температур окружающей среды двоичным электромагнитным исполнительным механизмом с большой удельной или фактической мощностью.
Указанная задача решается в способе управления электромагнитным двоичным исполнительным механизмом, включающем в себя подачу протекающего через обмотку возбуждения электромагнитного исполнительного механизма импульса пускового тока и задание его амплитуды, контроль максимальной, длительности импульса тока заданной амплитуды, снижение амплитуды тока, протекающего через обмотку возбуждения электромагнитного исполнительного механизма.
Указанная задача решается тем, что перед снижением амплитуды тока, протекающего через обмотку возбуждения электромагнитного исполнительного механизма, измеряют температуру окружающей среды, а длительность импульса пускового тока заданной амплитуды определяют как сумму двух составляющих: постоянной, зависящей от конструктивных особенностей электромагнитного исполнительного механизма, и переменной - температурной поправки длительности времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, обратно пропорционально зависящей от температуры окружающей среды, одновременно с началом подачи импульса пускового тока начинают измерение фактической длительности времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, учитывают температурную поправку длительности времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, сравнивают с эталонной длительностью времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, причем, если фактическая длительность времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы будет больше допустимой длительности времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, формируют сигнал-прогноз постепенного отказа электромагнитного исполнительного механизма.
При этом изложенное поясняется следующими математическими зависимостями:
Тпт=Тпс-(±Tпt), где
Тпт - длительность импульса пускового тока;
Тпс - постоянная составляющая длительности импульса пускового тока, определяемая конструктивно;
Tпt - температурная поправка длительности импульса пускового тока, зависящая от температуры окружающей среды.
Постоянная составляющая длительности импульса пускового тока (Тпс) выбирается из условия:
Тпп≤Тпс≤Тпк, где
Тпп - постоянная составляющая длительности импульса пускового тока, определяемая временем гарантированного перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы при расчетной температуре окружающей среды и номинальном напряжении;
Тпк - критическая длительность импульса пускового тока, определяемая предельно допустимой тепловой мощностью электромагнитного исполнительного механизма, при расчетной температуре окружающей среды и номинальном напряжении. Допустимая длительность времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы определяется следующей математической зависимостью:
Тд=Тпзу-(±Тфt), где
Тд - допустимая длительность времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы;
Тпзу - эталонная длительность времени перехода электромагнитного исполнительного механизма, работающего в расчетных температурных условиях, из состояния логического нуля в состояние логической единицы;
Тфt - температурная поправка длительности времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, зависящая от температуры окружающей среды.
Условием формирования сигнал-прогноза постепенного отказа лектромагнитного исполнительного механизма может служить нарушение условия: Тф≤Тд, где
Тф - фактическая длительность времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы.
Совершенно очевидно, что Тпзу≤Тпс. Учитывая изложенное, а также то, что в зависимости от конструктивных особенностей электромагнитного исполнительного механизма, диапазона температур окружающей, электромагнитный исполнительный механизм, среды и разброса питающего напряжения может выполняться условие -
Tпt=Тфt следует: Тд≤Тпт, а уравнение Тпт=Тпс-(±Tпt) можно представить в виде Тпт=Тпс-(±Тфt)
Данный способ управления может быть дополнен следующими этапами:
- Задают длительность импульса удерживающего тока, определяемую следующей математической зависимостью:
Тут≤Тук-(±Tyt), где
Тут - длительность импульса удерживающего тока,
Тук - критическая длительность импульса удерживающего тока, определяемая предельно допустимой тепловой мощностью электромагнитного исполнительного механизма, при расчетной температуре окружающей среды и номинальном напряжении,
Tyt - температурная поправка длительности импульса удерживающего тока, зависящая от температуры окружающей среды;
- Задают длительность импульса экстремального тока, определяемую следующей математической зависимостью:
Тэт=Тэк-(±Тэt), где
Тэт - длительность импульса экстремального удерживающего тока,
Тэк - критическая длительность импульса экстремального удерживающего тока, определяемая предельно допустимой тепловой мощностью электромагнитного исполнительного механизма, работающего при расчетной температуре окружающей среды и повышенном напряжении,
Тэt - температурная поправка длительности импульса экстремального удерживающего тока, зависящая от температуры окружающей среды.
Причем в зависимости от конструктивных особенностей электромагнитного исполнительного механизма, диапазона температур окружающей, электромагнитный исполнительный механизм, среды и разброса питающего напряжения может выполняться условие: Tпt=Tyt=Тэt=Тфt.
Изобретение поясняется чертежом, где изображена блок-схема устройства
управления двоичным электромагнитным исполнительным механизмом (цепи питания не показаны).
Указанный способ управления реализован в устройстве управления электромагнитным двоичным исполнительным механизмом, образованном электромагнитным двоичным исполнительным механизмом 1, включающим в себя привод (не показан) и обмотку 2 возбуждения, источником 3 питания, исполнительным блоком 4, включающим в себя выходной канал 5, подключенный к обмотке возбуждения 2, входной канал 6, подключенный к источнику питания 3, и канал 7 управления, блоком 8 управления, задатчиком 9 логического состояния, резистором 10, таймером 12 длительности импульса пускового тока, включающим в себя генератор импульсов 13, блок 14 измерения температуры окружающей среды и первый счетчик 15 импульсов, а также блоком 1 6 энергосбережения и защиты и блоком 17 диагностики.
Блок 8 управления образован первым блоком 18 логического умножения, содержащим выходной канал 19, первый 20, второй 21, третий 22 и четвертый 23 входные каналы, вторым блоком 24 логического умножения, содержащим выходной канал 25, первый 26, второй 27, третий 28 и четвертый 29 входные каналы. Задатчик 9 логического состояния выполнен в виде управляемого оператором ключевого элемента, снабженного входным 30 и выходным 31 каналами. Генератор 13 импульсов выполнен термозависимым и включает в себя выходной канал 32 и канал 33 температурной корректировки частоты. Первый счетчик 15 импульсов включает в себя выходной канал 34, входной канал 35 и канал 36 управления началом счета. Блок 16 энергосбережения и защиты образован кинематически сопряженным с приводом (не показан) электромагнитного исполнительного механизма 1 нормально замкнутым, при нахождении электромагнитного исполнительного механизма 1 в состоянии логического нуля, контактором 37 контроля факта перехода электромагнитного двоичного исполнительного механизма из состояния логического нуля в состояние логической единицы, включающим в себя входной 38 и выходной 39 каналы, гальванически разобщенным с цепью питания обмотки 2 возбуждения блоком 40 контроля цепи обмотки 2 возбуждения электромагнитного исполнительного механизма 1 на наличие экстремального тока, включающим в себя выходной канал 41 и входной канал 42, гальванически разобщенным с цепью питания обмотки 2 возбуждения блоком 43 контроля цепи обмотки 2 возбуждения электромагнитного исполнительного механизма 1 на наличие аварийного тока, включающим в себя выходной канал 44 и входной канал 45, первый инвертор 46, включающий в себя входной 47 и выходной 48 каналы, второй инвертор 49, включающий в себя входной 50 и выходной 51 каналы, второй счетчик 52 импульсов, включающий в себя выходной канал 53, входной канал 54 и канал 55 управления началом счета, третий счетчик 56 импульсов, включающий в себя выходной канал 57, входной канал 58 и канал 59 управления началом счета. При этом второй счетчик 52 импульсов совместно с генератором 13 импульсов и блоком 14 измерения температуры окружающей среды таймера 12 длительности импульса пускового тока образуют таймер длительности удерживающего тока, а третий счетчик 56 импульсов совместно с генератором 13 импульсов и блоком 14 измерения температуры окружающей среды таймера 12 длительности импульса пускового тока образуют таймер длительности импульса экстремального тока. Блок 17 диагностики образован дискриминатором 60 превышения фактической, относительно эталонной, длительности перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, включающим в себя выходной канал 61, первый 62 и второй 63 входные каналы, четвертый счетчик 64 импульсов, включающий в себя выходной канал 65, входной канал 66 и канал 67 управления началом счета, а также блок индикации 68 сигнал-прогноза постепенного отказа электромагнитного исполнительного механизма 1. При этом четвертый счетчик 64 импульсов совместно с генератором 13 импульсов и блоком 14 измерения температуры окружающей среды таймера 12 длительности импульса пускового тока образуют таймер эталонной длительности перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы. Входной канал 47 первого инвертора 46 и выходной канал 19 первого блока 18 логического умножения непосредственно, а выходной канал 25 второго блока 24 логического умножения через резистор 10 гальванически соединены с каналом 7 управления исполнительного блока 4. Входной канал 30 задатчика 9 логического состояния гальванически соединен с источником питания 3. Четвертый входной канал 29 второго блока 24 логического умножения, четвертый входной канал 23 первого блока 18 логического умножения, канал 36 управления началом счета первого счетчика 15 импульсов, канал 67 управления началом счета четвертого счетчика 64 импульсов гальванически соединены с выходным каналом 31 задатчика 9 логического состояния. Канал 33 температурной корректировки частоты генератора 13 импульсов гальванически подключен к блоку 14 измерения температуры окружающей среды. Входной канал 35 первого счетчика 15 импульсов, входной канал 54 второго счетчика 52 импульсов, входной канал 58 третьего счетчика 56 импульсов и входной канал 66 четвертого счетчика 64 импульсов гальванически соединены с выходным каналом 32 генератора 13 импульсов. Выходной канал 34 первого счетчика 15 импульсов гальванически соединен с третьим входным каналом 22 первого блока 18 логического умножения. Выходной канал 53 второго счетчика 52 импульсов гальванически соединен с третьим входным каналом 28 второго блока 24 логического умножения. Выходной канал 57 третьего счетчика 56 импульсов гальванически соединен с первым входным каналом 26 второго блока 24 логического умножения. Выходной канал 65 четвертого счетчика 64 импульсов гальванически соединен со вторым входным каналом 63 дискриминатора 60 превышения фактической, относительно эталонной, длительности перехода электромагнитного исполнительного механизма 1 из состояния логического нуля в состояние логической единицы. Канал 55 управления началом счета второго счетчика 52 импульсов гальванически соединен с выходным каналом 48 первого инвертора 46. Входной канал 38 контактора 37 контроля факта перехода электромагнитного двоичного исполнительного механизма 1 из состояния логического нуля в состояние логической единицы гальванически соединен с выходным каналом 31 задатчика 9 логического состояния. Выходной канал 39 контактора 37 контроля факта перехода электромагнитного двоичного исполнительного механизма 1 из состояния логического нуля в состояние логической единицы гальванически соединен со вторым входным каналом 21 первого блока 18 логического умножения и первым входным каналом 62 дискриминатора 60 превышения фактической, относительно эталонной, длительности перехода электромагнитного исполнительного механизма 1 из состояния логического нуля в состояние логической единицы. Выходной канал 61 дискриминатора 60 гальванически соединен с блоком индикации сигнал-прогноза постепенного отказа электромагнитного исполнительного механизма 1.
Входной канал 42 блока 40 бесконтактного контроля цепи обмотки 2 возбуждения электромагнитного исполнительного механизма 1 на наличие экстремального тока, входной канал 45 блока 43 бесконтактного контроля цепи обмотки 2 возбуждения электромагнитного исполнительного механизма 1 на наличие аварийного тока выполнены в виде установленных вокруг токопроводяшей шины 69, расположенной на участке между обмоткой 2 возбуждения электромагнитного исполнительного механизма 1 и выходным каналом 5 исполнительного блока 4, индуктивных регистраторов магнитного поля, создаваемого протекающим через обмотку возбуждения 2 током, а сами блоки 40 и 43 выполнены в виде компараторов тока.
Выходной канал 41 блока 40 бесконтактного контроля цепи обмотки 2 возбуждения электромагнитного исполнительного механизма 1 на наличие экстремального тока гальванически соединен с входным каналом 50 второго инвертора 49 и первым входным каналом 20 первого блока 18 логического умножения. Выходной канал 44 блока 43 бесконтактного контроля цепи обмотки 2 возбуждения электромагнитного исполнительного механизма 1 на наличие аварийного тока гальванически соединен со вторым входным каналом 27 второго блока 24 логического умножения. Канал 59 управления началом счета третьего счетчика 56 гальванически соединен с выходным каналом 51 второго инвертора 49.
Устройство управления электромагнитным исполнительным механизмом 1 работает следующим образом.
В исходном состоянии (задатчик 9 логического состояния разомкнут) на выходном канале 34 первого счетчика 15 импульсов, на выходном канале 53 второго счетчика 52 импульсов, на выходном канале 57 третьего счетчика 56 импульсов, на выходном канале 65 четвертого счетчика 64 импульсов, на выходном канале 41 блока 40 контроля цепи обмотки 2 возбуждения на наличие экстремального тока, а равно и на входном канале 50 второго инвертора 49, на выходном канале 44 блока 43 контроля цепи обмотки 2 возбуждения на наличие аварийного тока формируются сигналы логической единицы, на выходном канале 31 задатчика 9 логического состояния, на выходном канале 39 контактора 37 контроля факта перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, на первом входном канале 62 дискриминатора 60, на канале 36 управления началом счета первого счетчика 15 импульсов, на канале 67 управления началом счета четвертого счетчика 64 импульсов формируются сигналы логического нуля, на выходном канале 51 второго инвертора 49, а равно и на канале 59 управления началом счета третьего счетчика 56 импульсов формируется сигнал логического нуля, на выходном канале 32 генератора 13 импульсов, а равно и на каналах 35, 54, 58, 66 управления началом счета первого 15, второго 52, третьего 56 и четвертого 64 счетчиков импульсов, соответственно, генерируется сигнал, частота которого пропорционально зависит от знака и амплитуды температуры окружающей среды. При этом первый 15, третий 56 и четвертый 64 счетчики импульсов находятся в режиме ожидания. На входные первый 20 и третий 22 каналы первого блока 19 логического умножения поступают сигналы логической единицы, а на второй 21 и четвертый 23 входные каналы первого блока 19 логического умножения поступают сигналы логического нуля, на первый 26, второй 27 входные каналы второго блока 24 логического умножения поступают сигналы логической единицы, а на четвертый входной канал 29 второго блока 24 логического умножения поступает сигнал логического нуля. При этом, на выходных каналах 19 и 25 первого 19 и второго 24 блоков логического умножения, соответственно, а равно и на канале 7 управления исполнительным блоком 4 формируются сигналы логического нуля. Исполнительный блок 4 закрыт, ток в цепи обмотки 2 возбуждения электромагнитного исполнительного механизма 1 отсутствует, на входном канале 47 первого инвертора 46 формируется сигнал логического нуля, на выходном канале 48 первого инвертора 46, а равно и на канале 55 управления началом счета второго счетчика 52 импульсов формируется сигнал логической единицы. Второй счетчик 52 запускается и по истечении интервала времени протекания удерживающего тока на его выходном канале 53 формируется сигнал логического нуля. На третий входной канал 28 второго блока 24 логического умножения поступают сначала сигнал логической единицы, а затем сигнал логического нуля. Электромагнитный исполнительный механизм 1 находится в состоянии логического нуля. Дискриминатор 60 превышения фактической, относительно эталонной, длительности перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы на выходном канале 61 формирует сигнал логического нуля. Блок индикации 68 сигнал-прогноза постепенного отказа электромагнитного исполнительного механизма 1 не функционирует.
При замыкании задатчика 9 логического состояния на его выходном канале 31 формируется сигнал логической единицы. При этом на четвертом входном канале 29 второго блока 24 логического умножения, на четвертом 23 и втором 21 входных каналах первого блока 18 логического умножения, на канале 36 управления началом счета первого счетчика 15 импульсов, на входном канале 62 дискриминатора 60, а также на канале 67 управления началом счета четвертого счетчика 64 сигнал логического нуля заменяется сигналом логической единицы. На выходном канале 19 первого блока логического умножения, на входном канале 47 первого инвертора 46, на канале 7 управления исполнительным блоком 4 формируется сигнал логической единицы, исполнительный блок 4 переходит в состояние насыщения, а первый 15 и четвертый 64 счетчики импульсов начинают отсчет длительности импульса пускового тока и эталонной длительности перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы. При этом исполнительный блок 4 соединяет обмотку 2 возбуждения электромагнитного исполнительного механизма 1 с источником 3 питания. Одновременно с изменением логического состояния выходного канала 19 первого блока 18 логического умножения на выходном канале 48 первого инвертора 46, а равно и на канале 55 управления началом счета второго счетчика 52 импульсов формируется сигнал логического нуля. Второй счетчик 52 импульсов обнуляет счет, если счет не завершен, и переходит в режим ожидания, на его выходном канале 53 формируется сигнал логической единицы, на третий входной канал 28 второго блока 24 логического умножения поступает сигнал логической единицы. На выходном канале 25 второго блока 24 логического умножения формируется сигнал логической единицы, поступающий через резистор 10 на канал 7 управления исполнительного блока 4.
При этом логический сигнал формируемый на выходном канале 19 первого блока 18 логического умножения шунтирует логический сигнал формируемый на выходном канале 25 второго блока 24 логического умножения, второй блок 24 логического умножения находится в режиме ожидания.
Электромагнитный исполнительный механизм 1 переходит из состояния логического нуля в состояние логической единицы.
В случае размыкания задатчика 9 логического состояния на этом этапе на его выходном канале 31 формируется сигнал логического нуля, поступающий, в частности, на четвертый входной канал 23 первого блока 18 логического умножения и на четвертый входной канал 29 второго блока 24 логического умножения. На выходных каналах 19 и 25 первого 18 и второго 24 блоков логического умножения формируется сигнал логического нуля, исполнительный блок 4 переходит в состояние отсечки, обмотка 2 возбуждения обесточивается, электромагнитный исполнительный механизм переходит из состояния логической единицы в состояние логического нуля, устройство переходит в исходное состояние.
После завершения счета длительности импульса пускового тока первым счетчиком 15 импульсов на его выходном канале 34 формируется сигнал логического нуля, который поступает на третий входной канал 22 первого блока 18 логического умножения. На выходном канале 19 первого блока 18 логического умножения формируется сигнал логического нуля. На канале 7 управления исполнительным блоком 4, а равно и на входном канале 47 первого инвертора 46 уровень сигнала снижается до промежуточного, между логическим нулем и логической единицей, уровня, величина которого обусловлена резистором 10. Исполнительный блок 4 выходит из состояния насыщения, а протекающий через обмотку 2 возбуждения электромагнитного исполнительного механизма 1 ток уменьшается до величины удерживающего тока. Снижение уровня сигнала на входном канале 47 первого инвертора 46 приводит к формированию на его выходном канале 48, а равно и на канале 55 управления началом счета второго счетчика 52 импульсов сигнала логической единицы. Второй счетчик 52 импульсов начинает отсчет длительности импульса тока удержания. Электромагнитный исполнительный механизм сохраняет достигнутое логическое состояние.
В случае если счет, отсчитываемый первым счетчиком 15 импульсов, не завершен, а электромагнитный исполнительный механизм 1 изменил состояние логического нуля на состояние логической единицы, контактор 37 контроля факта перехода на своем выходном канале 39 формирует сигнал логического нуля, поступающий на второй входной канал 21 первого блока 18 логического умножения. На выходном канале 19 первого блока 18 логического умножения формируется сигнал логического нуля. На канале 7 управления исполнительным блоком 4, а равно и на входном канале 47 первого инвертора 46 уровень сигнала снижается до промежуточного, между логическим нулем и логической единицей, уровня, величина которого обусловлена резистором 10. Исполнительный блок 4 выходит из состояния насыщения, а протекающий через обмотку 2 возбуждения электромагнитного исполнительного механизма 1 ток уменьшается до величины удерживающего тока. Снижение уровня сигнала на входном канале 47 первого инвертора 46 приводит к формированию на его выходном канале 48, а равно и на канале 55 управления началом счета второго счетчика 52 импульсов сигнала логической единицы. Второй счетчик 52 импульсов начинает отсчет длительности импульса удерживающего тока. Электромагнитный исполнительный механизм 1 сохраняет достигнутое логическое состояние.
В случае если счет, отсчитываемый первым счетчиком 15 импульсов, не завершен, а электромагнитный исполнительный механизм 1 изменил состояние логического нуля на состояние логической единицы, контактор 37 контроля факта перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы формирует сигнал логического нуля также и на входном канале 62 дискриминатора 60. При этом, если сигнал логического нуля, поступающий на входной канал 62 дискриминатора 60, запаздывает относительно сигнала логического нуля, поступающего с выходного канала 65 четвертого счетчика 64 импульсов на входной канал 63 дискриминатора 60, дискриминатор 60, на своем выходном канале 61, формирует сигнал логической единицы, поступающий на блок индикации 68. Блок индикации 68 выдает звуковой и/или световой сигнал-прогноз постепенного отказа электромагнитного исполнительного механизма 1.
В случае размыкания задатчика 9 логического состояния на этом этапе на его выходном канале 31 формируется сигнал логического нуля, поступающий, в частности, на четвертый входной канал 23 первого блока 18 логического умножения и на четвертый входной канал 29 второго блока 24 логического умножения. На выходных каналах 19 и 25 первого 18 и второго 24 блоков логического умножения формируется сигнал логического нуля, исполнительный блок 4 переходит в состояние отсечки, обмотка 2 возбуждения обесточивается, электромагнитный исполнительный механизм переходит из состояния логической единицы в состояние логического нуля, устройство переходит в исходное состояние.
После завершения счета длительности импульса удерживающего тока, отсчитываемого вторым счетчиком 52 импульсов, на выходном канале 53 второго счетчика 52 импульсов формируется сигнал логического нуля, поступающий на третий входной канал 28 второго блока 24 логического умножения. На выходном канале 25 второго блока 24 логического умножения формируется сигнал логического нуля.
Исполнительный блок 4 переходит в состояние отсечки, обмотка 2 возбуждения обесточивается, электромагнитный исполнительный механизм переходит из состояния логической единицы в состояние логического нуля, устройство переходит в исходное состояние.
В случае повышения напряжения источника 3 питания до экстремальной величины величина тока, протекающего в цепи обмотки 2 возбуждения электромагнитного исполнительного механизма 1, возрастает до экстремального значения, регистрируемого на входном канале 42 блока 40 контроля цепи обмотки 2 возбуждения на наличие экстремального тока. На выходном канале 41 блока 40, а равно и на входном канале 50 второго инвертора, формируется сигнал логического нуля. При этом на первый входной канал 20 первого блока 18 логического умножения поступает сигнал логического нуля, а на выходном канале 51 второго инвертора 49, а равно и на канале 57 управления началом счета третьего счетчика 56 импульсов, формируется сигнал логической единицы. На выходном канале 19 первого блока 18 логического умножения формируется сигнал логического нуля, исполнительный блок 4 переводит обмотку 2 электромагнитного исполнительного механизма 1 на питание удерживающим током, а третий счетчик 56 импульсов начинает отсчет длительности импульса экстремального тока. Электромагнитный исполнительный механизм 1 сохраняет достигнутое логическое состояние. Одновременно с началом работы третьего счетчика 56 импульсов запускается второй счетчик 52 импульсов. Учитывая, что длительность импульса экстремального тока, отсчитываемая третьим счетчиком 56 импульсов, короче длительности импульса удерживающего тока, отсчитываемой вторым счетчиком 52 импульсов, а выходные каналы 57 и 54 третьего 56 и второго 54 счетчиков импульсов соединены с первым 26 и третьим входными каналами, соответственно, второго блока 24 логического умножения, работа второго счетчика 52 импульсов не оказывает влияния на поведение устройства на данном этапе. После завершения счета, отсчитываемого третьим счетчиком 56 импульсов, на выходном канале 57 последнего, а равно и на первом входном канале 26 второго блока 24 логического умножения, формируется сигнал логического нуля. На выходном канале 25 второго блока 24 логического умножения, а равно и на канале 7 управления исполнительным блоком 4, формируется сигнал логического нуля. Исполнительный блок 4 переходит в состояние отсечки, обмотка 2 возбуждения электромагнитного исполнительного механизма обесточивается, электромагнитный исполнительный механизм 1 возвращается в состояние логического нуля.
В случае если счет, отсчитываемый первым счетчиком 15 импульсов, не завершен, электромагнитный исполнительный механизм 1 не изменил состояние логического нуля на состояние логической единицы, а величина тока, протекающего в цепи обмотки 2 возбуждения электромагнитного исполнительного механизма 1 достигла аварийного значения, регистрируемого на входном канале 45 блока 43 контроля цепи обмотки 2 возбуждения на наличие аварийного тока, на выходном канале 44 блока 43, на выходном канале 41 блока 40, а равно и на первом входном канале 20 первого блока 18 логического умножения, и на втором входном канале 27 второго бока 24 логического умножения, формируются сигналы логического нуля. На выходных каналах 19 и 25 первого 18 и второго 24 блоков логического умножения, а равно и на канале 7 управления исполнительным блоком 4, формируются сигналы логического нуля. Исполнительный блок переходит в состояние отсечки. Обмотка 2 возбуждения электромагнитного механизма обесточивается. Электромагнитный исполнительный механизм возвращается в состояние логического нуля.
Изменение температуры окружающей среды прямо пропорционально отслеживается блоком 14 измерения температуры, выдающим соответствующую команду на канал 33 температурной корректировки частоты генератора 13 импульсов. Снижение (увеличение) температуры ведет к снижению (увеличению) частоты импульсов, поступающих с выходного канала 32 генератора 13 на входные каналы первого 15, второго 52, третьего 56 и четвертого 64 счетчиков импульсов, к увеличению (снижению) интервалов времени, отрабатываемых каждым из указанных таймеров: -таймером длительности импульса пускового тока, таймером длительности импульса удерживающего тока, таймером длительности импульса экстремального тока, а также таймером эталонной длительности перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы и, как следствие, к изменению допустимой тепловой мощности электромагнитного исполнительного механизма 1, а также изменению состояния «норма» для электромагнитного исполнительного механизма.
Таким образом, предложенный способ управления обеспечивает надежную эксплуатацию, диагностику и экономичное управление электромагнитным исполнительным механизмом с высокой удельной или фактической мощностью при его питании от сети с нестабилизированным напряжением и работе в широком интервале отрицательных и положительных температур окружающей среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВОИЧНЫМ ЭЛЕКТРОМАГНИТНЫМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ ПОВЫШЕННОЙ МОЩНОСТИ | 2002 |
|
RU2265905C2 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Устройство управления электромагнитным железоотделителем | 1990 |
|
SU1801584A1 |
| Следящий электропривод для разметки шкал | 1984 |
|
SU1228071A1 |
| Способ защиты от однофазных замыканий на землю в разветвленной электрической сети | 1986 |
|
SU1472993A1 |
| Регулятор постоянного тока для измерения тока срабатывания защиты стабилизаторов напряжения | 1982 |
|
SU1051522A1 |
| Устройство для частотного пуска синхронной машины | 1979 |
|
SU855908A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБЪЕКТОВ | 1992 |
|
RU2065569C1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1810978A1 |
| КОМБИНИРОВАННЫЙ ПОЗИЦИОНИРУЮЩИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ ЭЛЕКТРОМАГНИТНО-ИНДУКЦИОННОГО ТИПА | 2020 |
|
RU2759209C1 |
Изобретение относится к области электротехники, в частности, к узлам и агрегатам транспортных средств. Способ включает подачу протекающего через обмотку возбуждения электромагнитного исполнительного механизма импульса пускового тока и задание его амплитуды, измерение температуры окружающей среды, контроль максимальной длительности импульса пускового тока заданной амплитуды, определяемой как сумма двух составляющих: постоянной, зависящей от конструктивных особенностей электромагнитного исполнительного механизма, и переменной - температурной поправки. Одновременно с началом подачи импульса пускового тока начинают измерение фактической длительности времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, учитывают температурную поправку, данные сравнивают с эталонной длительностью времени перехода и формируют сигнал-прогноз постепенного отказа электромагнитного исполнительного механизма. Техническим результатом изобретения является обеспечение надежности эксплуатации работающего от сети с нестабилизированным напряжением в широком интервале температур двоичного электромагнитного исполнительного механизма большой мощности. 1 ил.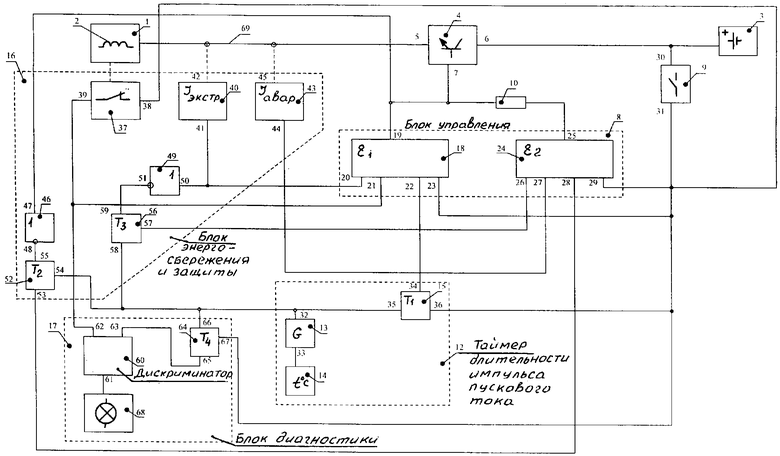
Способ управления электромагнитным двоичным исполнительным механизмом, включающий в себя подачу протекающего через обмотку возбуждения электромагнитного исполнительного механизма импульса пускового тока и задание его амплитуды, контроль максимальной длительности импульса тока заданной амплитуды, снижение амплитуды тока, протекающего через обмотку возбуждения электромагнитного исполнительного механизма, отличающийся тем, что перед снижением амплитуды тока, протекающего через обмотку возбуждения электромагнитного исполнительного механизма измеряют температуру окружающей среды, а длительность импульса пускового тока заданной амплитуды определяют как сумму двух составляющих: постоянной, зависящей от конструктивных особенностей электромагнитного исполнительного механизма, и переменной - температурной поправки длительности времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, когда снижение или увеличение температуры ведет, соответственно, к увеличению или снижению интервала времени длительности импульса пускового тока, одновременно с началом подачи импульса пускового тока начинают измерение фактической длительности времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, учитывают температурную поправку длительности времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, сравнивают с эталонной длительностью времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, причем, если фактическая длительность времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы будет больше допустимой длительности времени перехода электромагнитного исполнительного механизма из состояния логического нуля в состояние логической единицы, формируют сигнал-прогноз постепенного отказа электромагнитного исполнительного механизма.
| DE 4130711 A1, 18.03.1993 | |||
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 1997 |
|
RU2143761C1 |
| DE 10045976 A1, 28.03.2002 | |||
| DE 3344662 A1, 13.06.1985 | |||
| Способ управления электромагнитным исполнительным устройством | 1989 |
|
SU1689998A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 1997 |
|
RU2143761C1 |
| Устройство для форсированного управления электромагнитом постоянного тока | 1981 |
|
SU957286A1 |

