Изобретение относится к электротехнике и может быть использовано в электроприводах производственных, например, крановых механизмов.
Целью изобретения является повышение эффективности торможения и расширение области применения.
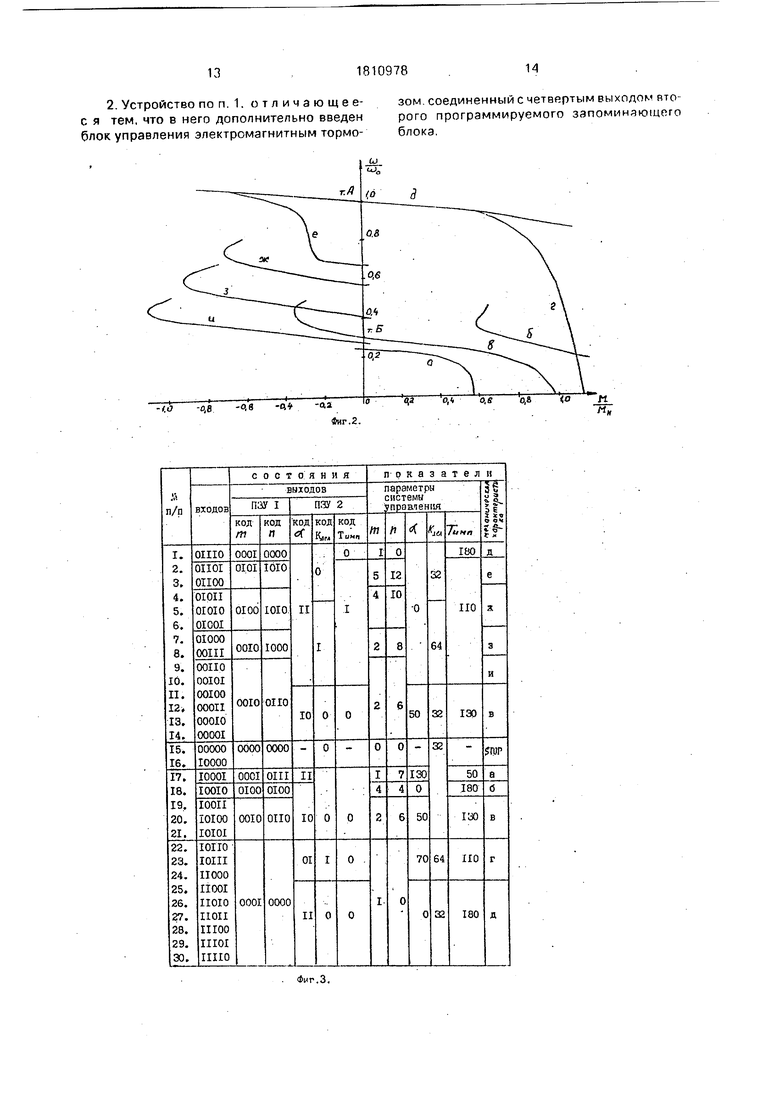
На фиг. 1 показана структурная схема устройства для управления асинхронным двигателем; на фиг. 2 в качестве примера представлены полученные для схемы фиг. 1 экспериментальные механические характеристики предлагаемого электропривода при использовании асинхронного двигателя типа MTF 011-6 мощностью 1,4 кВт; на фиг. 3 также в качестве примера приведена таблица соответствия состояний программируемых запоминающих блоков и показателей работы электропривода; на фиг, 4-7 - временные диаграммы работы предлагаемого устройства соответственно при пуске электродвигателя на высокую скорость, на малую скорость, при переходе с малой скорости на большую и-при торможении с высокой скорости на малую; на фиг. 8 - таблица соответствия состояний реверсивного счетчика.
Устройство содержит асинхронный двигатель 1, преобразователь переменного напряжения 2, выполненный в виде встречно-параллельно соединенных тиристоров 3-8 и включенных между зажимами статорных обмоток электродвигателя 1 и зажимами для подключения питающей сети. К управляющим входам тиристоров 3-8 подключен блок 9 фазосмещения и формирования управляющих импульсов, который включает в себя последовательно соединенные блок 10 фазосмещения и распределения управляющих импульсов, блок 11 одновибрэторов, коммутатор 12 каналов и блок 13 усилителей, причем один из входных каналов коммутатора 12 соединен с блоком 10 фазосмещения и распределения импульсов непосредственно, а другой через блок 11 одновибраторов. Выход цифрового задатчика кода 14 соединен с одним из входов цифрового компаратора 15, выходы которого подключены ко входам реверсивного счетчика 16, причем один из выходов цифрового компаратора 15 подключен и к одному из адресных входов как первого, так и второго программируемых запоминающих блоков 17 и 18. Остальные адресные входы запоминающих блоков 17 и 18 соединены параллельно и подключены к выходам реверсивного счетчика 16 и ко второму .входу компаратора 15. Выходы запоминающего блока 17 подключены ко входам блока 19 формирования временных интервалов, выход которого подключен к блокирующему входу блока 13 усилителей, а тактовый вход блока 19 соединен с выходом генератора импульсов 20 и, одновременно, с тактовым
входом управляемого делителя частоты 21, входы задания коэффициента деления которого соединены с частью выходов заломи нающего блока 18, а другие выходы запоминающего блока 18 соединены со входом цифроаналогового преобразователя 22, со входом переключения каналов коммутатора 12, входом блока 23 управления магнитным тормозом. Выходной сигнал с цифроаналогового преобразователя 22.no-.
ступает на вход блока 10 формирования и распределения управляющих импульсов. На фиг. 1 связи между блоками, содержащие несколько каналов, показаны двойными линиями. На фиг. 2 в качестве примера
представлены экспериментальные механические характеристики а, б, в, г, д, е, ж, з, и асинхронного двигателя мощностью 1,4 кВт, которые могут быть пол- учены с помощью предлагаемой системы управления. На фиг. 3 приведена таблица кодов, запрограммированных в запоминающих блоков 17 и 18 и необходимых для реализации механических характеристик фиг. 2. Здесь же приведены числовые значения
параметров управления электропривода, которые соответствуют кодам, запрограммированным в блоках 17 и 18. В данном примере адресное пространство запоминающих блоков 17 и 18 разбито на две части,
обращение к каждой из которых определяется старшим адресным разрядом и задается логическим сигналом с выхода неравенства цифрового компаратора 15 (фиг, 1), При наличии на этом разряде сигнала лог. 1 электропривод работает в пусковом режиме (строки № 1-14, фиг. 3), при наличии сигнала лог. О - в тормозном режиме (строки № 17-30, фиг, 3), а также в установившихся режимах при номинальной
(строка № 1) и пониженной (строка № 11) скоростях. Данные, записанные в запоминающих блоках 17 и 18, задают параметры управления электропривода: числа тип, угол а, Кдел, Тимп, где m и п - целые числа,
определяющие длительность последовательно Повторяющихся временных интервалов соответственно для включенного и отключенного состояний преобразователя переменного напряжения 2 (фиг. 1); а-угол
управления тиристоров 3-8 преобразователя 2; Тимп. -длительностьуправляющих.им- пульсов, подаваемых на тиристоры 3-8,Кдел, - коэффициент деления управляемого делителя частоты 21.
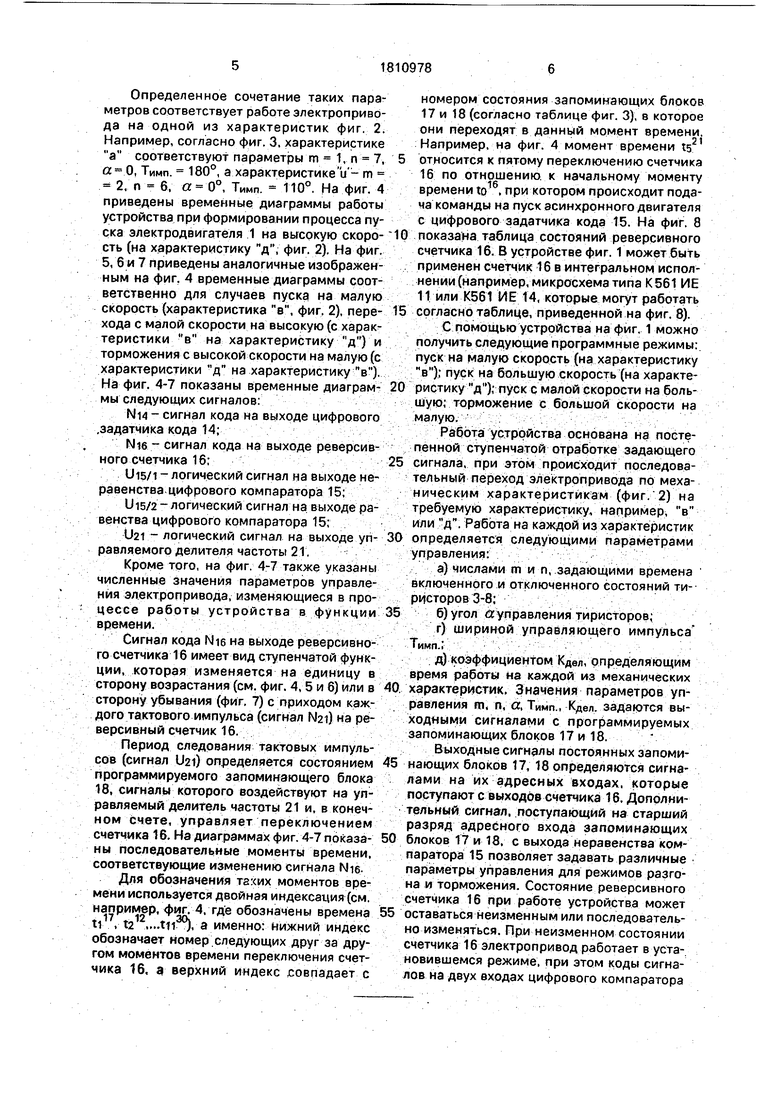
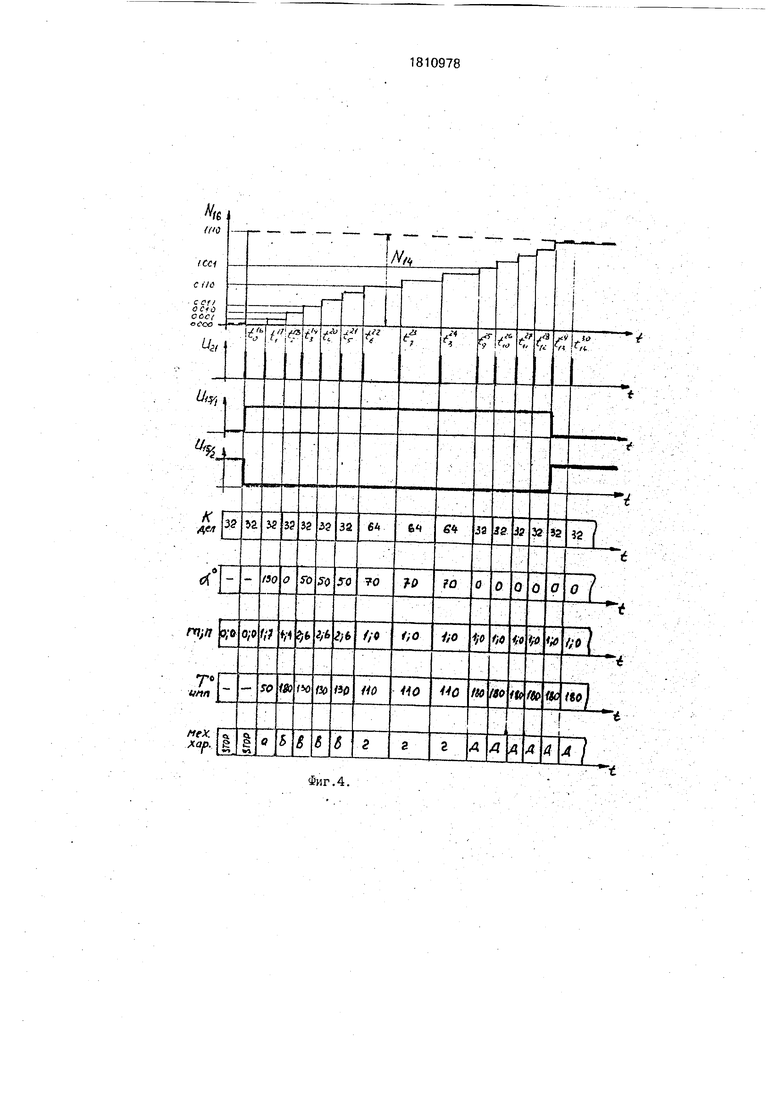
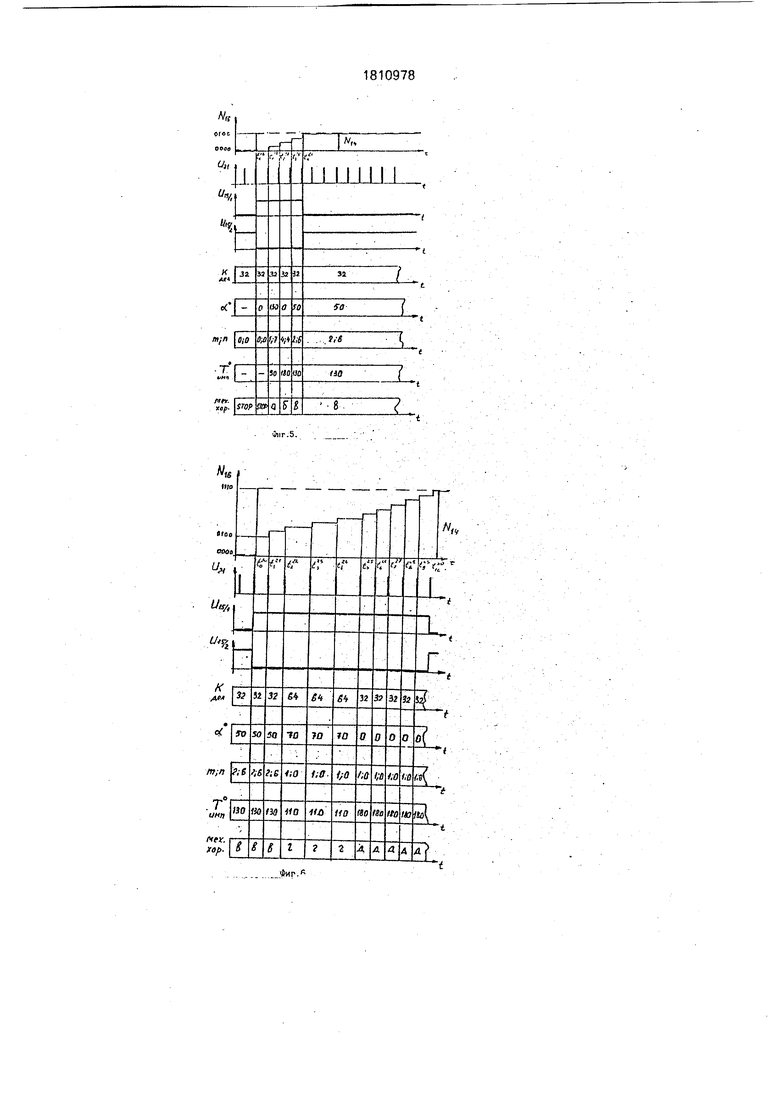
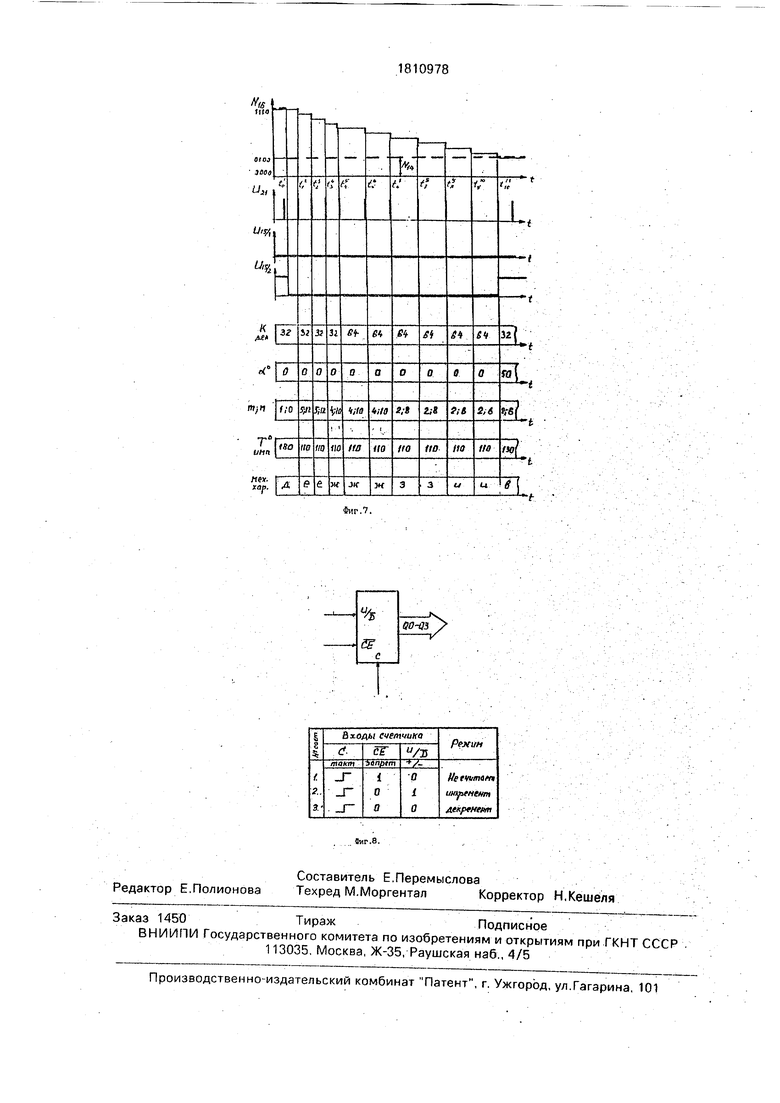
Определенное сочетание таких параметров соответствует работе электропривода на одной из характеристик фиг. 2. Например, согласно фиг. 3. характеристике а соответствуют параметры m 1, п 7, а О, Тимп. 180°, а характеристике - m .- 2, п 6, а 0°, Тимп. - 110°. На фиг. 4 приведены временные диаграммы работы устройства при формировании процесса пуска электродвигателя 1 на высокую скорость (на характеристику д, фиг. 2). На фиг. 5, 6 и 7 приведены аналогичные изображенным на фиг, 4 временные диаграммы соответственно для случаев пуска на малую скорость (характеристика в, фиг. 2), перехода с малой скорости на высокую (с характеристики в на характеристику д) и торможения с высокой скорости на малую (с характеристики д на характеристику в). На фиг. 4-7 показаны временные диаграммы следующих сигналов:
Ni4 - сигнал кода на выходе цифрового ,задатчика кода 14;
Nie - сигнал кода на выходе реверсивного счетчика 16;
Uis/1 - логический сигнал на выходе неравенства цифрового компаратора 15;
Uis/2-логический сигнал на выходе равенства цифрового компаратора 15;
U21 логический сигнал на выходе управляемого делителя частоты 21.
Кроме того, на фиг. 4-7 также указаны численные значения параметров управления электропривода, изменяющиеся в процессе работы устройства в функции времени.
Сигнал кода Ni6 на выходе реверсивного счетчика 16 имеет вид ступенчатой функции, которая изменяется на единицу в сторону возрастания (см. фиг. 4, 5 и 6) или в сторону убывания (фиг. 7) с приходом каждого тактового импульса (сигнал N21) на реверсивный счетчик 16.
Период следования тактовых импульсов (сигнал U2i) определяется состоянием программируемого запоминающего блока 18, сигналы которого воздействуют на управляемый делитель частоты 21 и, в конечном счете, управляет переключением счетчика 16, На диаграммах фиг. 4-7 показаны последовательные моменты времени, соответствующие изменению сигнала Nie.
Для обозначения тахих моментов времени используется двойная индексация (см. например, фиг. 4, где обозначены времена tv , ta12.....3), а именно: нижний индекс обозначает номер следующих друг за другом моментов времени переключения счетчика 16, а верхний индекс совпадает с
номером состояния запоминающих блоков 17 и 18 (согласно таблице фиг. 3), в которое они переходят в данный момент времени. Например, на фиг. 4 момент времени ts 5 относится к пятому переключению счетчика 16 по отношению, к начальному моменту времени . при котором происходит подача команды на пусх асинхронного двигателя с цифрового задатчика кода 15. На фиг. 8
0 показана таблица состояний реверсивного счетчика 16. В устройстве фиг. 1 может быть применен счетчик 16 в интегральном исполнении (например, микросхема типа К561 ИЕ 11 или К561 ИЕ 14, которые могут работать
5 согласно таблице, приведенной на фиг. 8).
С помощью устройства на фиг, 1 можно
получить следующие программные режимы:
пуск на малую скорость (на характеристику
в); пуск на большую скорость (на характе0 ристику д); пуск с малой скорости на большую; торможение с большой скорости на
малую. ;:-/- V :- ... : .; V--V-.-:
Работа устройства основана на постепенной ступенчатой отработке задающего
5 сигнала, при этом происходит последовательный переход электропривода по механическим характеристикам (фиг. 2) на требуемую характеристику, например, в или д. Работа на каждой из характеристик
0 определяется следующими параметрами управления:
а) числами m мп, задающими времена включенного и отключенного состояний ти-- ристоров 3-8;
5 б) угол «управленияi тиристоров;
г) шириной управляющего импульса
Тимл.1 ;- . у : / . . .
; д) коэффициентом Кдвл, определяющим время работы на каждой из механических
0. характеристик, Значения параметров управления т, п, а, Тимп., Кдел. задаются выходными сигналами с программируемых запоминающих блоков 17 и 18.:
Выходные сигналы постоянных запоми5 нающих блоков 17, 18 определяются сигналами на их адресных входах, которые поступают с выходов счетчика 16, Дополнительный сигнал, .поступающий на старший разряд адресного входа запоминающих
0 блоков 17 и 18, с выхода неравенства компаратора 15 позволяет задавать различные параметры управления для режимов разгона и торможения. Состояние реверсивного счетчика 16 при работе устройства может
5 оставаться неизменным или последовательно изменяться. При неизменном состоянии счетчика 16 электропривод работает в установившемся режиме, при этом коды сигналов на двух входах цифрового компаратора
15 ргзны между собой, а сигналы на выходах равенства и неравенства компаратора 15, которые поступают соответственно на входы запрета такта и направления счета реверсивного счетчика 16, имеют логические уровни согласно состоянию № 1 таблице фиг. 8.
Последовательные изменения состояния счетчика 16 происходит при неравенстве кодов входных сигналов цифрового компаратора 15,
Направление счета определяется в соответствии с таблицей фиг. 8. В этом случае электропривод работает в переходном режиме и инкремент или декремент счетчика 16 происходит с приходом каждого тактового импульса до тех пор, пока содержимое счетчика 16 не сравняется с сигналом, поступающим с цифрового задатчика кода 14, после чего электропривод перейдет в работу в установившемся режиме. В результате последовательного изменения состояний, счетчика 16 из запоминающих блоков 17 и 18 последовательно выбираются и поступают на соответствующие блоки сигналы в виде двоичных кодов, задающие параметры управления системы.
В запоминающем блоке 17 содержатся данные о числах тип, которые обеспечивают необходимые частоты пониженной составляющей на статорных обмотках, а тем самым и скорость асинхронного двигателя 1. Коды чисел m и п поступают с запоминающего блока 17 на вход блока формирования временных интервалов 19. В запоминающем блоке 18 находятся данные, задающие: угол а управления тиристоров; коэффициент Кдел., который определяет время работы на каждой характеристике асинхронного двигателя; длительность импульса Тимп,, управляющего тиристорами 3- 8, также команду на срабатывание электромагнитного тормоза 23.
Устройство на фиг. 1 при пуске электропривода работает следующим образом.
В исходном состоянии скорость электропривода равна нулю, при .этом сигнал с блока цифрового задатчика кода, 14 тоже равен нулю. Поскольку сигналы на входах цифрового компаратора 15 равны нулю, то сигнал на его выходах равенства и неравенства равны соответственно лог. 1 и лог. О, при этом на адресных входах программируемых запоминающих блоков 17 и 18 будет присутствовать сигнал, соответствующий состоянию N 15 фиг. 3 и параметрам управления m 0 и п 0, что определяет нулевую скорость электропривода.
Следует отметить, что параметр Кдел. 32. и на счетчик 16 с делителя частоты 21
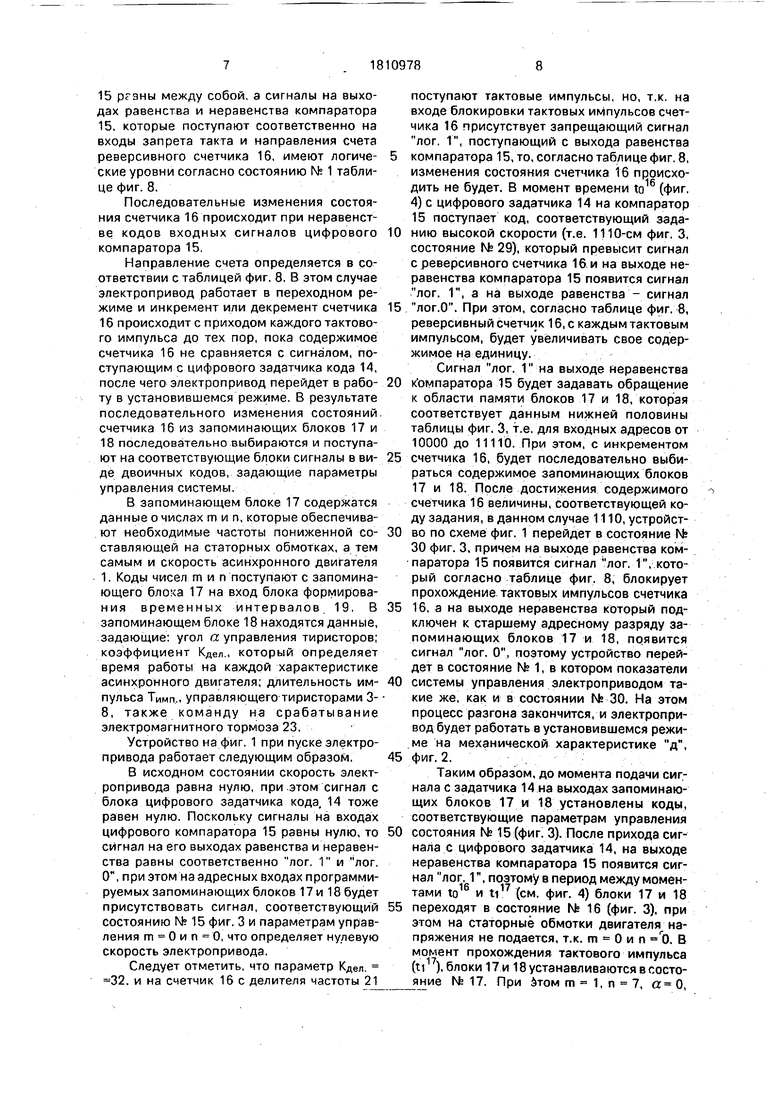
поступают тактовые импульсы, но, т.к. на входе блокировки тактовых импульсов счетчика 16 присутствует запрещающий сигнал лог. 1, поступающий с выхода равенства
компаратора 15, то, согласно таблице фиг. 8, изменения состояния счетчика 16 происходить не будет. В момент времени to16 (фиг, 4) с цифрового задатчика 14 на компаратор 15 поступает код, соответствующий зада0 нию высокой скорости (т.е. 1110-см фиг. 3, состояние № 29), который превысит сигнал с реверсивного счетчика 16 и на выходе неравенства компаратора 15 появится сигнал лог. 1, а на выходе равенства - сигнал
5 лог.О. При этом, согласно таблице фиг. 8, реверсивный счетчик 16, с каждым тактовым импульсом, будет увеличивать свое содержимое на единицу.
Сигнал лог. 1 на выходе неравенства
0 компаратора 15 будет задавать обращение к области памяти блоков 17 и 18, которая соответствует данным нижней половины таблицы фиг. 3, т.е. для входных адресов от 10000 до 11110. При этом, с инкрементом
5 счетчика 16, будет последовательно выбираться содержимое запоминающих блоков 17 и 18. После достижения содержимого счетчика 16 величины, соответствующей коду задания, в данном случае 1110, устройст0 во по схеме фиг. 1 перейдет в состояние № 30 фиг. 3, причем на выходе равенства компаратора 15 появится сигнал лог. 1, который согласно таблице фиг. 8, блокирует прохождение тактовых импульсов счетчика
5 16, а на выходе неравенства который подключен к старшему адресному разряду запоминающих блоков 17 и 18, появится сигнал лог. О, поэтому устройство перейдет в состояние № 1, в котором показатели
0 системы управления электроприводом такие же, как и в состоянии № 30. На этом процесс разгона закончится, и электропривод будет работать в установившемся режиме на механической характеристике д,
5 фиг. 2.
Таким образом, до момента подачи сигнала с задатчика 14 на выходах запоминающих блоков 17 и 18 установлены коды, соответствующие параметрам управления
0 состояния № 15 (фиг 3). После прихода сигнала с цифрового задатчика 14, на выходе неравенства компаратора 15 появится сигнал лог. Г, поэтому в период между моментами to и ti17 (см. фиг. 4) блоки 17 и 18
5 переходят в состояние № 16 (фиг. 3), при этом на статорныё обмотки двигателя напряжения не подается, т.к. m 0 и п Ъ. В момент прохождения тактового импульса (ti ), блоки 17 и 18 устанавливаются в состо- яние № 17. При этом m 1, п 7, а О,
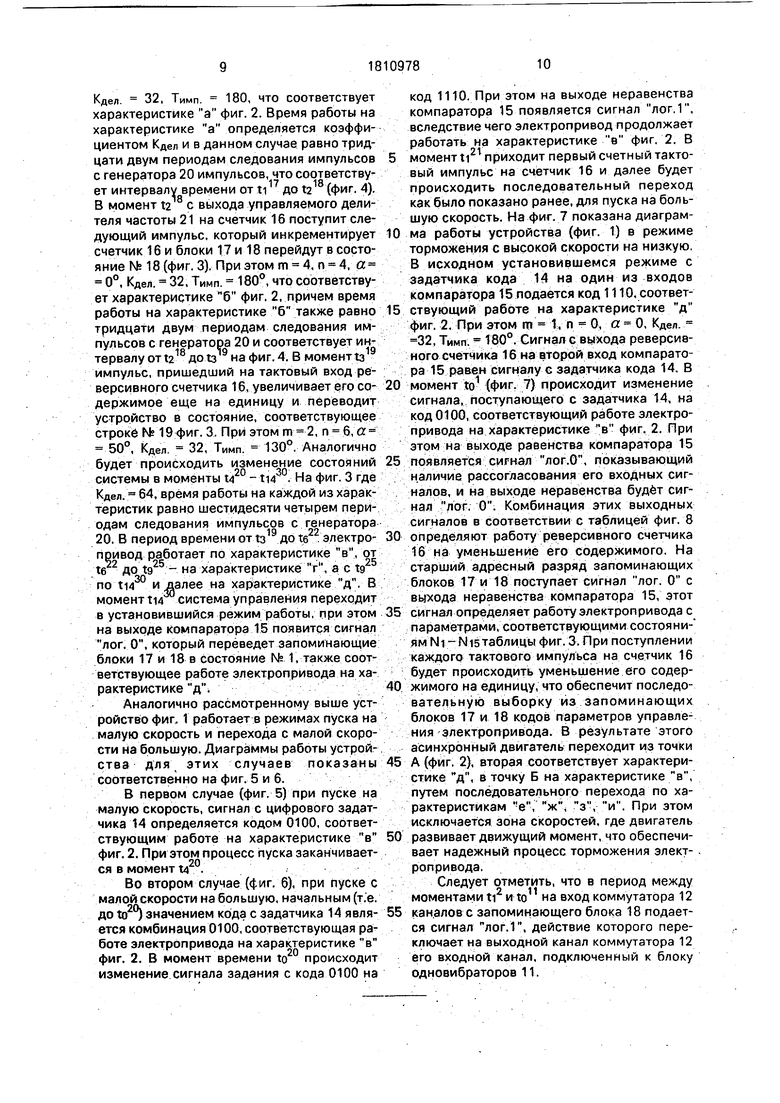
Кдел. 32, Тимп. 180, что соответствует характеристике а фиг. 2. Время работы на характеристике а определяется коэффициентом Кдел и в данном случае равно тридцати двум периодам следования импульсов с генератора 20 импульсов, что соответствует интервалу времени от ц17 до ta18 (фиг. 4). В момент t2 8 с выхода управляемого делителя частоты 21 на счетчик 16 поступит следующий импульс, который инкрементирует счетчик 16 и блоки 17 и 18 перейдут в состояние № 18 (фиг. 3). При этом , п 4, а- 0°, Кдел. 32, Тимп. 180°, что соответствует характеристике б фиг. 2, причем время работы на характеристике б также равно тридцати двум периодам следования импульсов с генератора 20 и соответствует интервалу от ta18 до ta на фиг. 4. В момент 1з19 импульс, пришедший на тактовый вход реверсивного счетчика 16, увеличивает его содержимое еще на единицу и переводит устройство в состояние, соответствующее строке № 19ФИГ. 3, При этомт 2, п 6,а 50°, Кдел. 32, Тимп. 130°. Аналогично будет происходить изменение состояний системы в моменты м20-tn30. На фиг. 3 где Кдел. 64, время работы на каждой из характеристик равно шестидесяти четырем периодам следования импульсов с генератора 20. В период времени от гз19 до te22 электропривод работает по характеристике в, от te 2 до tg25- на характеристике г, а с tg25 по ti4 и далее на характеристике д. В момент ш система управления переходит в установившийся режим работы, при этом на выходе компаратора 15 появится сигнал лог. О, который переведет запоминающие блоки 17 и 18 в состояние № 1, также соответствующее работе электропривода на характеристике
Аналогично рассмотренному выше устройство фиг, 1 работает в режимах пуска на малую скорость и перехода с малой скорости на большую. Диаграммы работы устрой-. ства для этих случаев показаны соответственно на фиг. 5 и 6.
В первом случае (фиг. 5) при пуске на малую скорость, сигнал с цифрового задатчика 14 определяется кодом 0100, соответствующим работе на характеристике в фиг. 2. При этом процесс пуска заканчивается в момент t420.
Во втором случае (фиг. 6), при пуске с малой скорости набольшую, начальным (т.е. до to20) значением кода с задатчика 14 является комбинация 0100, соответствующая работе электропривода на характеристике в фиг. 2. В момент времени to20 происходит изменение сигнала задания с кода 0100 на
код 1110. При этом на выходе неравенства компаратора 15 появляется сигнал лог.1, вследствие чего электропривод продолжает работать на характеристике в фиг, 2. В момент ц21 приходит первый счетный тактовый импульс на счётчик 16 и далее будет происходить последовательный переход как было показано ранее, для пуска на большую скорость. На фиг. 7 показана диаграмма работы устройства (фиг. 1) в режиме торможения с высокой скорости на низкую. В исходном установившемся режиме с задатчика кода 14 на один из входов компаратора 15 подаётся код 1110, соответствующий работе на характеристике д фиг. 2. При этом m 1, п О- я 0, Кдел. . 32, Тимп. - 180°. Сигнал с выхода реверсивного счетчика 16 на второй вход компаратора 15 равен сигналу е задатчика кода 14. В
момент to1 (фиг. 7) происходит изменение сигнала, поступающего с задатчика 14, на код 0100, соответствующий работе электропривода на характеристике в фиг. 2. При этом на выходе равенства компаратора 15
появляется сигнал лог.О, показывающий наличие рассогласования его входных сигналов, и на выходе неравенства будет сигнал лог. О. Комбинация этих выходных сигналов в соответствии с таблицей фиг. 8
определяют работу реверсивного счетчика 16 на уменьшение его содержимого. На старший адресный разряд запоминающих блоков 17 и 18 поступает сигнал лог. О с выхода неравенства компаратора 15, этот
сигнал определяет работу электропривода с параметрами, соответствующими состояни- ямМг-Мгбтаблицы фиг. 3. При поступлении каждого тактового импульса на счетчик 16 будет происходить уменьшение его содержимого на единицу, что обеспечит последовательную выборку из запоминающих блоков 17 и 18 кодов параметров управления электропривода. В результате этого асинхронный двигатель переходит из точки
А (фиг. 2), вторая соответствует характеристихе д, в точку Б на характеристике в, путем последовательного перехода по характеристикам е, ж, з, и. При этом исключается зона скоростей, где двигатель
развивает движущий момент, что обеспечивает надежный процесс торможения элект- . ропривода.
Следует отметить, что в период между моментами ti2 и to11 на вход коммутатора 12
каналов с запоминающего блока 18 подается сигнал лог.1, действие которого переключает на выходной канал коммутатора 12 его входной канал, подключенный к блоку одновибраторов 11.
Принцип работы блока одновибраторов 11 заключается в формировании управляющих импульсов тиристоров 3-8 длительностью 100°-110° эл. градусов, что приводит к существенному (на 20-30%) увеличению тормозного момента устройства.
В остальных случаях, т.е. при сигнале лог. О на входе управления коммутатора 12, длительность управляющих импульсов определяется выражением: Тимп. 180°- а, где «-угол управления тиристоров,
При этом сигнал с блока 10 формирования импульсов поступает на вход блока 13 усилителей, минуя блок 11 одновибраторов, т.е. в этом случае к выходу коммутатора 12 подключен прямой канал с блока 10 формирования импульсов.
Если электромагнитный тормозной момент, создаваемый асинхронным электродвигателем 1 устройства фиг. 1, недостаточен для нормальной работы механизма, что вероятнее всего может проявиться в начальные моменты времени процесса торможения с высокой скорости, то устройство позволяет создавать дополнительный механический момент при торможении за счет кратковременного включения электромагнитного тормоза, который управляется блоком 23. В устройстве предусмотрена подача сигнала с запоминающего блока 18 на блок 23 управления электромагнитным тормозом, который обеспечивает включение тормоза при работе механизма на характеристиках е, и, ж, фиг, 2, т.е. в период времени ti2 - ts6 фиг. 7. Если создание дополнительного механического тормозного момента не требуется, то блок 23 предварительно, до начала работы устройства, отключается,
Устройство по зволяет направленно формировать с требуемым темпом переходные процессы отдельно для пуска и торможения. Оно также обеспечивает работу на пониженной скорости, что необходимо для механизмов точной остановки.
Устройство может включать в себя серийный тиристорный преобразователь напряжения, причем затраты на изготовление дополнительных блоков, необходимых для реализации всего устройства, составляют небольшую часть стоимости преобразователя.
Формула изобретения 1. Устройство для управления асинхронным электродвигателем, содержащее преобразователь переменного напряжения, предназначенный для включения между зажимами статора и зажимами питающей сети «и выполненный в виде встречно-параллельно соединенных тиристоров, к управляющим входам которых подключен блок фазос- мещения и формирования управляющих импульсов, выполненный в виде блока фазосмещения и распределения управляющих импульсов и блока усилителей, последовательно соединенные реверсивный .счетчик, первый программируемый запоминающий блок и блок формирования временных интервалов, выходом подключенный к
блоку усилителей блока фазосмещения и формирования управляющих импульсов, генератор импульсов, выходом соединенный с блоком формирования временных интервалов, цифроаналоговый преобразователь,
отличающееся тем, что, с целью повышения эффективности торможения и расширения области применения, в него введены цифровой задатчик кода, цифровой компаратор, управляемый делитель частоты, второй программирующий запоминающий блок, а блок фазосмещения и формирования управляющих импульсов снабжен блоком одновибраторов и коммутатором каналов, при этом тактовый вход
реверсивного счетчика подключен к выходу управляемого делителя частоты, тактовый вход которого соединен с выходом генератора импульсов, управляющий вход коммутатора каналов подключен к первому
выходу второго программируемого запоминающего блока, второй выход которого сое- динен с входом цифроаналогового преобразователя, а третий выход подключен к входу задания коэффициента деления
управляемого делителя частоты, адресные входы второго программируемого запоминающего блока соединены параллельно входам первого программируемого запоминающего блока, причем один из входных
адресных разрядов программируемых запо-. минающих блоков подключен к входу на-, правления счета реверсивного счетчика и выходу неравенства цифрового компаратора, выход равенства которого подключен к
входу блокировки тактовых импульсов реверсивного счетчика, при этом один из входов цифрового компаратора соединен с выходом цифрового задатчика кода, а второй вход - с выходом реверсивного
счетчика, выход цифроаналогового преобразователя подключен к входу блока фазосмещения и распределения управляющих импульсов, а выход коммутатора каналов подключен к входу блока усилителей, причем один вход коммутатора каналов соединён с выходом блока фазосмещения и распределения управляющих импульсов не:- посредственно, а другой - через блок одно- вибраторов.
2. Устройство по п. 1. отличающее- с я тем, что в него дополнительно введен блок управления электромагнитным тормозом, соединенный с четвертым выходом второго программируемого запоминающего блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1734184A2 |
| Устройство для управления асинхронным электродвигателем | 1984 |
|
SU1252898A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| Устройство для контроля толщины сварного шва | 1989 |
|
SU1839229A1 |
| Устройство автоматического управления электроприводом центрифуги | 1987 |
|
SU1618451A1 |
| Устройство для стабилизации скорости электропривода | 1987 |
|
SU1474765A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПУСКОМ И ОСТАНОВОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2011 |
|
RU2454784C1 |
| Устройство для управления синусоидальными вибрациями | 1985 |
|
SU1269112A1 |
Устройство управления асинхронным электродвигателем позволяет направленно формировать с требуемым темпом переходные процессы отдельно для пуска и торможения без использования тахогенератора. Устройство также обеспечивает работу на пониженной скорости, что необходимо для механизмов точной остановки. Устройство можно использовать прежде всего для асинхронных электроприводов механизмов од- нобалочных кранов и тельферов. Целью изобретения является повышение эффективности торможения и расширение области применения. Поставленные цели достигаются за счет реализации специальных законов управления в системе тиристорный регулятор напряжения - асинхронный электродвигатель. Устройство содержит асинхронный двигатель 1, преобразователь переменного напряжения 2, выполненный в виде встречно-параллельно соединенных тиристоров 3-8. Блок 9 фазосмещения и формирования управляющих импульсов выполнен в виде блока 10 фазосмещения и распределения управляющих импульсов, блока 1.1 одновибраторов, коммутатора каналов 12 и блока 13 усилителей. Выход цифрового задатчика кода 14 соединен с одним из входом цифрового Компаратора 15, выходы которого подключены к входам реверсивного счетчика 1 6 и к одному из адресных входов программируемых запоминающих блоков 17,18, Выходы блока 17 подключены к входам блока 19 формирования временных интервалов, тактовый вход которого соединен с выходом генератора импульсов 20 и с тактовым входом управляемого депителя частоты 21, 1 з.п. ф-лыч 8 ил ел с со О SQ -ч GO
Фиг.З.
Фиг.4.
%
&
00-Q3y
| Устройство для управления преобразователем переменного напряжения асинхронного двигателя | 1982 |
|
SU1097156A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
