Настоящая заявка согласно Разделу 35 §119 Кодекса законов США притязает на приоритет заявки, озаглавленной "Soft Handover Method for Multimedia Broadcast/Multicast Service in a CDMA Mobile Communication System" (Способ мягкой передачи обслуживания для мультимедийной вещательной/многоадресной услуги в системе подвижной связи МДКР), зарегистрированной в Патентном ведомстве Кореи 27 апреля 2002 г. под номером 2002-23283, содержание которой включено в качестве ссылки в настоящее описание.
Область техники
Настоящее изобретение относится к мягкой передаче обслуживания в системе подвижной связи многостанционного доступа с кодовым разделением каналов (МДКР) и, в частности, к мягкой передаче обслуживания в мультимедийной вещательной/многоадресной службе.
Предшествующий уровень техники
В настоящее время вследствие развития промышленности средств связи, услуги, представляемые системой подвижной связи многостанционного доступа с кодовым разделением каналов (упоминаемая в дальнейшем как МДКР), расширяются за счет средств многоадресной связи, ориентированных на работу с мультимедиа, которые передают не только данные для передачи речевого сигнала, но также данные большой емкости, такие как пакетные данные и канальные данные. Для поддержания средств многоадресной связи, ориентированных на работу с мультимедиа, была предложена вещательная/многоадресная служба, в которой один источник данных обслуживает множество терминалов абонентов (упоминаемых в дальнейшем как "ТА"). Вещательная/многоадресная услуга может быть разделена на сотовую вещательную услугу (упоминаемую в дальнейшем как "СВУ"), т.е. основанную на сообщениях, и мультимедийную вещательную/многоадресную услугу (упоминаемую в дальнейшем как "МВМУ"), которая поддерживает мультимедийные данные, такие как изображение и речь в реальном масштабе времени, неподвижное изображение и текст.
СВУ представляет собой услугу для вещательной передачи множества сообщений на все ТА, расположенные в конкретной зоне обслуживания. Конкретной зоной обслуживания, где предоставляется СВУ, может быть вся зона соты, где функционирует СВС. МВМС представляет собой услугу для одновременного предоставления речевых данных и данных изображения и требует значительных ресурсов передачи. Услуги МВМ предоставляются по вещательному каналу, так как множество услуг, возможно, могут предоставляться одновременно в одной соте.
В общем случае, в асинхронной системе подвижной связи по существу не предусмотрена синхронизация моментов времени между узлами B, так как узлы В имеют свои собственные независимые таймеры, и опорные моменты времени узлов В могут различаться от узла к узлу. Единицей измерения таймера называется номер кадра узла В (НКВ). Каждый узел В может включать в себя множество сот, и каждая сота имеет таймер, который увеличивает свое значение через регулярные интервалы от НКВ. Единица измерения таймера, назначенная для каждой соты, называется номером системного кадра (НСК). Один НСК имеет длительность 10 мс, и НСК имеет величину от 0 до 4095. Один НСК состоит из 38400 чипов, и один чип имеет длительность 10 мс/38400.
Поэтому, когда контроллер радиосети (упоминаемый в дальнейшем как "КРС") передает данные МВМУ на узлы В, если нет отдельного процесса синхронизации между узлами В (или сотами), то соответствующие узлы В (или соты) будут передавать данные МВМУ в различные моменты времени. Это означает, что, когда ТА перемещается в новую соту (или узел В), то он не сможет воспользоваться существующей услугой.
Очевидно, что ТА перемещается из зоны одной соты в зону другой соты, а не находится в зоне одной соты. В этот момент стандартная передача речи продолжается за счет мягкой передачи обслуживания. Однако мягкая передача обслуживания для услуги МВМУ ранее не была определена. Поэтому, если терминал абонента, который принимает услугу, предоставляемую МВМУ от конкретного узла В в зоне конкретной соты, перемещается в зону другой соты, то терминал абонента не сможет продолжать принимать данные МВМУ и должен снова выполнить операцию инициализации МВМУ для приема услуги МВМУ из новой соты (или от нового узла В).
Сущность изобретения
Задачей, лежащей в основе настоящего изобретения, является создание способа мягкой передачи обслуживания для терминала абонента (ТА), который использует сигнал мультимедийной вещательной/многоадресной службы (МВМС), называемый в дальнейшем мультимедийной вещательной многоадресной услугой (МВМУ) в системе подвижной связи многостанционного доступа с кодовым разделением каналов (МДКР).
Другая задача настоящего изобретения заключается в создании способа синхронизации моментов времени передачи данных между узлами В, управляемыми одним контроллером радиосети (КРС), тем самым осуществляя мягкую передачу обслуживания между сотами, которые поддерживают обслуживание, предоставляемое МВМС.
Еще одна задача настоящего изобретения состоит в создании способа минимизации разности моментов времени передачи данных между сотами, которые поддерживают обслуживание МВМС.
Еще одной задачей настоящего изобретения является создание способа минимизации разности моментов времени передачи данных между сотами, которые обеспечивают услугу МВМУ с тем, чтобы выполнить мягкую передачу обслуживания без расширения емкости буфера, включенного в ТА.
Еще одной задачей настоящего изобретения является создание способа определения момента времени передачи данных между сотами, позволяющего терминалу абонента осуществлять мягкое объединение данных от множества сот, которые поддерживают услугу МВМУ.
Еще одной задачей настоящего изобретения является создание способа, позволяющего терминалу абонента, который пользуется услугами, предоставляемыми МВМС, принимать данные от различных узлов В с минимальной разностью моментов времени.
В соответствии с первым аспектом настоящего изобретения создан способ передачи вещательных данных от соседних узлов В на один из множества терминалов абонентов (ТА), когда ТА перемещается в область передачи обслуживания между соседними узлами В, в системе подвижной связи многостанционного доступа с кодовым разделением каналов (МДКР), имеющей по меньшей мере два соседних узла В, контроллер радиосети (КРС), подсоединенный к узлам В, и ТА, расположенные в сотах, занятых соответствующими узлами В, в котором узлы В передают данные асинхронно и передают общие вещательные данные на ТА в пределах узлов В. Способ содержит передачу первой разности между моментом времени начала передачи первого системного кадра от первого узла В из соседних узлов В и моментом времени начала приема второго системного кадра, соответствующего первому системному кадру, принимаемому от второго узла В из соседних узлов В, от первого узла В на контроллер радиосети КРС; передачу второй разности между моментом времени начала передачи второго системного кадра от второго узла В и моментом времени начала приема первого системного кадра, соответствующего второму системному кадру, принимаемому от первого узла В, от второго узла В на КРС; и вычисление разности между моментами времени начала передачи первых и вторых системных кадров из первой и второй разности, в котором каждый момент времени начала кадров вещательных данных, передаваемых от первого узла В, информирует первый и второй узел В о моменте времени передачи кадров вещательных данных.
В соответствии со вторым аспектом настоящего изобретения предложен способ передачи вещательных данных от соседних узлов В на один из множества терминалов абонентов (ТА), когда ТА перемещается в область передачи обслуживания между соседними узлами В, в системе подвижной связи многостанционного доступа с кодовым разделением каналов (МДКР), имеющей по меньшей мере два соседних узла В, контроллер радиосети (КРС), подсоединенный к узлам В, и ТА, расположенные в сотах, занятых соответствующими узлами В, в котором узлы В передают данные асинхронно и передают общие вещательные данные на ТА в пределах узлов В. Способ содержит передачу разности между моментом времени начала передачи первого системного кадра от первого узла В из соседних узлов В и моментом времени начала передачи второго системного кадра от второго узла В из соседних узлов В, от ТА, расположенного в области передачи обслуживания, на КРС; умножение конкретного целого числа из целых чисел от 0 до 255 на суммарное количество чипов, составляющих один номер системного кадра, суммирование результата умножения и конкретного целого числа из целых чисел от 0 до 38399, и передачу результата суммирования в качестве первого смещения для определения момента времени начала передачи кадров вещательных данных посредством КРС; и суммирование разности между моментами времени начала и первого смещения, и передачи результата суммирования в качестве второго смещения, что позволяет второму узлу В передавать кадр вещательных данных в то же время, что и первый узел В.
В соответствии с третьим аспектом настоящего изобретения предложен способ передачи вещательных данных от соседних узлов В на один из множества терминалов абонентов (ТА), когда ТА перемещается в область передачи обслуживания между соседними узлами В, в системе подвижной связи многостанционного доступа с кодовым разделением каналов (МДКР), имеющей по меньшей мере два соседних узла В, контроллер радиосети (КРС), подсоединенный к узлам В, и ТА, расположенные в сотах, занятых соответствующими узлами В, в котором узлы В передают данные асинхронно и передают общие вещательные данные на ТА в пределах узлов В. Согласно способу передают запрос, производимый посредством КРС, на соседние узлы В относительно сообщения наблюдаемой разности моментов времени номера межсистемных кадров с аналогичным узлом В на соседние узлы В; передают сообщение с каждого соседнего узла В на КРС, соответствующее разности между моментом времени начала передачи его первого системного кадра и моментом времени начала приема второго системного кадра, соответствующего первому системному кадру, принимаемому от аналогичного узла В; определяют посредством КРС смещение момента времени передачи каждого соседнего узла В так, что соседние узлы В могут передавать кадры вещательных данных одновременно, основываясь на величинах разности, сообщаемых от соседних узлов В, и затем передают определенные смещения момента времени передачи на соответствующие соседние узлы В; и передают каждым соседним узлом В кадры вещательных данных в момент времени передачи, к которому применяется смещение, предоставляемое от КРС.
В соответствии с четвертым аспектом настоящего изобретения предложен способ передачи вещательных данных от соседних узлов В на один из множества терминалов абонентов (ТА), когда ТА перемещается в область передачи обслуживания между соседними узлами В, в системе подвижной связи многостанционного доступа с кодовым разделением каналов (МДКР), имеющей по меньшей мере два соседних узла В, контроллер радиосети (КРС), подсоединенный к узлам В, и ТА, расположенные в сотах, занятых соответствующими узлами В, в котором узлы В передают данные асинхронно и передают общие вещательные данные на ТА в пределах узлов В. Согласно способу с КРС передают запрос на ТА, расположенный в области передачи обслуживания, на сообщение наблюдаемой разности моментов времени номера межсистемных кадров между соседними узлами В; производят прием, посредством ТА, системных кадров от соседних узлов В, измеряют наблюдаемую разность моментов времени номера межсистемных кадров, основанной на моменте времени, когда системные кадры были переданы от соседних узлов В, и сообщают результат измерения на КРС; определяют посредством КРС смещение момента времени передачи каждого соседнего узла В, так что соседние узлы В могут передавать кадры вещательных данных одновременно, основываясь на наблюдаемой разности моментов времени номера межсистемных кадров, сообщаемой от ТА, и затем передают определенные смещения моментов времени передачи на соответствующие соседние узлы В; и передают каждым соседним узлом В кадры вещательных данных в момент времени передачи, к которому применяется смещение, предоставляемое от КРС.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием вариантов его осуществления со ссылками на фигуры сопровождающих чертежей, в числе которых:
Фиг.1 изображает процедуру передачи данных от КРС на ТА в обычной асинхронной системе подвижной связи, включающей в себя КРС и узлы В;
Фиг.2 - пример процедуры передачи данных от КРС на ТА в обычной асинхронной системе подвижной связи, включающей в себя КРС и узлы В;
Фиг.3 - временную зависимость в процедуре синхронизации абонентской плоскости между КРС и узлом В в соответствии с вариантом осуществления настоящего изобретения;
Фиг.4 - временную зависимость между КРС и узлом В и процедуру синхронизации узлов посредством передачи сообщений в соответствии с вариантом осуществления настоящего изобретения;
Фиг.5 - схему последовательности сигналов для синхронизации моментов времени передачи узла В в асинхронной системе подвижной связи МДКР в соответствии с вариантом осуществления настоящего изобретения;
Фиг.6 - блок-схему, иллюстрирующую принцип действия узла В по схеме последовательности сигналов на фиг.5;
Фиг.7 - блок-схему, иллюстрирующую принцип действия КРС по схеме последовательности сигналов на фиг.5;
Фиг.8 - блок-схему, иллюстрирующую принцип действия ТА по схеме последовательности сигналов на фиг.5;
Фиг.9 - схему последовательности сигналов для синхронизации моментов времени передачи узла В в асинхронной системе подвижной связи МДКР в соответствии с другим вариантом осуществления настоящего изобретения;
Фиг.10 - блок-схему, иллюстрирующую принцип действия узла В по схеме последовательности сигналов на фиг.9;
Фиг.11 - блок-схему, иллюстрирующую принцип действия КРС по схеме последовательности сигналов на фиг.9;
Фиг.12 - блок-схему, иллюстрирующую принцип действия ТА по схеме последовательности сигналов на фиг.9; и
Фиг.13 - конструкцию передатчика узла В в асинхронной системе подвижной связи МДКР в соответствии с вариантом осуществления настоящего изобретения.
Подробное описание предпочтительного варианта осуществления изобретения
Ниже подробно описываются несколько предпочтительных вариантов осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. На чертежах одинаковые или аналогичные элементы обозначены одинаковыми позициями, даже если они изображены на разных чертежах. В нижеследующем описании для краткости опущено подробное описание известных функций и конфигураций, включенных в эту заявку.
В нижеследующем описании настоящее изобретение представлено с использованием одного типового варианта выполнения для достижения технических целей, указанных выше, а другие возможные варианты выполнения настоящего изобретения будут кратко упомянуты без подробного описания.
Ниже приводится описание стандартной процедуры передачи и приема данных МВМУ в асинхронной системе подвижной связи, поддерживающей услугу МВМУ. Конечно, схема, предложенная настоящим изобретением, может быть применена также в асинхронной системе подвижной связи, имеющей КРС и множество узлов В.
На фиг.1 показано, что при отсутствии отдельного процесса синхронизации между узлами В, ТА принимает данные МВМУ от узлов В в различные моменты времени вследствие отсутствия синхронизации между узлами В. Т.е. на фиг.1 изображена процедура передачи данных МВМУ от КРС на ТА в асинхронной системе подвижной связи, состоящей из КРС и двух узлов В. На фиг.1 предполагается, что узел В имеет одну соту.
Как показано на фиг.1, КРС 101 передает данные МВМУ, принимаемые из сети, на первый узел В 107 и второй узел В 103. С этой целью можно предположить, что КРС 101 копирует данные МВМУ в два блока данных МВМС и затем отдельно и одновременно передает скопированные блоки данных МВМС на первый и второй узел В 102 и 103. Номер кадра соединения (НКС) передается вместе с данными МВМУ. Однако, хотя блоки данных МВМУ были переданы от КРС 101 одновременно, если рассматривать задержку передачи на узлы В 102 и 103, то узлы В 102 и 103 примут данные МВМУ в разные моменты времени. Узлы В 102 и 103 должны определить номер системного кадра (НСК), где они будут передавать данные МВМС с НКС. НКС имеет величину от 0 до 255, а НСК имеет величину от 0 до 4095. Поэтому момент времени передачи данных МВМУ с НКС, имеющим величину остатка, полученную в результате деления конкретного НСК на 256, т.е. результирующую величину, полученную в результате выполнения операции по модулю 256 над НСК (НСК по модулю 256), определяется как конкретный НСК. Например, момент времени с НСК=3076 определяется как момент времени передачи данных МВМУ с НКС=4.
На фиг.1 позиция 110 представляет НСК, которым является временная ось соты №1, и НСК(N) и НСК(N+1) представляют изменение в НСК вследствие прохождения времени. В соответствии с позицией 110 данные с НКС(2) передаются в НСК(N) сотой №1, и данные с НКС(3) передаются в НСК(N+1) сотой №1. Обобщая, данные с НКС(k) передаются в НСК(N+k-2) сотой №1.
На фиг.1 позиция 115 представляет НСК, которым является временная ось соты №2, и НСК(М) и НСК(М+1) представляют изменение в НСК вследствие прохождения времени. В соответствии с позицией 115 данные с НКС(1) передаются в НСК(М) сотой №2, и данные с НКС(2) передаются в НСК(М+1) сотой №2. Обобщая, данные с НКС(k) передаются в НСК(M+k-1) сотой №2.
На фиг.1 представлен пример, в котором сота №1 и сота №2 синхронизированы по кадрам, но отличаются друг от друга НСК. Т.е. на фиг.1 изображен случай, когда НСК в соте №1 равен N, НСК соты №2 равен М. Однако, в целом, различные соты совмещаются друг с другом в НСК, а также в момент времени начала кадра. Ради удобства объяснения предполагается в настоящем изобретении, что различные соты совмещаются друг с другом в момент времени начала кадра.
Так как сота №1 и сота №2 принимают данные МВМС, имеющие одинаковый НКС, в различные моменты времени, их моменты времени передачи отличаются друг от друга. Например, сота №1 передает данные МВМУ с НКС(2) в НСК(N), тогда как сота №2 передает данные МВМУ с НКС(2) в НСК(М+1).
На фиг.1 позиция 111 представляет сигнал, который ТА №4, расположенный в области передачи обслуживания, принимает от соты №1, и позиция 112 представляет сигнал, который ТА №4 принимает от соты №2. ТА №4 может принимать более точные данные МВМУ посредством объединения сигнала, принимаемого от соты №1, с сигналом, принимаемым от соты №2. В этот момент объединение должно выполняться над данными МВМУ, имеющими одинаковый НКС. Например, ТА №4 объединяет НКС(2) данных МВМУ, передаваемый от соты №1 в НСК(N), с НКС(2) данных МВМУ, передаваемым от соты №2 в НСК(М+1).
Однако задержка передачи между сотой №1 и ТА №4 может отличаться от задержки передачи между сотой №2 и ТА №4. На фиг.1 задержка передачи сигнала, принимаемого от соты №2, относительно долее продолжительная, чем задержка передачи сигнала, принимаемого от соты №1. Поэтому для объединения ТА №4 должен непрерывно хранить данные МВМС, принимаемые от соты №1, в своем буфере, пока не будут приняты данные МВМУ с таким же НКС от соты №2. Однако, если разность между моментом времени, когда принимаются данные МВМУ от соты №1, и моментом времени, когда принимаются данные МВМУ от соты №2, превышает заранее определенную величину (например 256 чипов), то станет невозможным непрерывное хранение первых принимаемых данных МВМУ в буфере.
Для того чтобы решить эту проблему, данные МВМУ с одинаковым НКС от множества сот должны приниматься ТА, расположенным в области передачи обслуживания в течение заранее определенного периода времени.
Поэтому в настоящем изобретении предложен способ синхронизации моментов времени передачи множества сот, так что одинаковые данные МВМУ, передаваемые от множества сот, могут приниматься ТА в течение заранее определенного периода времени, и способ, позволяющий ТА объединять принимаемые одинаковые данные МВМУ. В настоящем изобретении предусмотрено, что если услуга МВМС поддерживается в асинхронной системе подвижной связи, должна выполняться синхронизация момента времени передачи данных между узлами В с целью обеспечения мягкой передачи обслуживания на ТА. Однако, как указано выше, в асинхронной системе подвижной связи синхронизация моментов времени между узлами В не предусмотрена. Т.е. в асинхронной системе подвижной связи синхронизация выполняется только между КРС и узлом В и между узлом В и ТА. Поэтому, в асинхронной системе подвижной связи, поддерживающей услугу МВМУ, разность моментов времени передачи данных МВМУ должна минимизироваться достижением синхронизации между сотами, чтобы получить мягкую передачу обслуживания. Это позволяет ТА, который принимает одинаковые данные от различных узлов В, осуществлять мягкое объединение принимаемых одинаковых данных. Поэтому, хотя ТА перемещается из одной соты в другую соту, ТА может непрерывно принимать данные МВМУ без потери данных.
Для синхронизации моментов времени передачи всех узлов В, существующих у одного КРС, как указано выше, ТА информирует КРС об относительной временной информации для моментов времени, когда ТА принимает данные передачи от каждой соты, и КРС синхронизирует моменты времени передачи соответствующих узлов В в зависимости от относительной временной информации.
В асинхронной системе подвижной связи, поддерживающей услугу МВМУ, в соответствии с вариантом осуществления настоящего изобретения, для того чтобы поддерживать услугу МВМУ для ТА, которому требуется мягкая передача обслуживания, необходимы следующие процедуры: 1) процедура синхронизации узлов; 2) процедура измерения для мягкой передачи обслуживания ТА в услуге МВМУ и процедура синхронизации моментов времени передачи данных в узле В.
Ниже приведено подробное описание вышеупомянутых процедур.
1. Процедура синхронизации узлов
Для определения смещения МВМУ требуется процесс синхронизации узлов для синхронизации, основанной на канальном интервале или кадре, между КРС и узлом В. На фиг.4 изображена временная зависимость между КРС и узлом В и процесс синхронизации узлов при помощи передачи конкретного сообщения.
Как показано на фиг.4, позиция 401 представляет временную ось КРС 403, а позиция 402 представляет временную ось узла В 404. Временная ось 401 КРС 403 разделена на номера кадров КРС (упоминаемые в дальнейшем как "НКК"). НКК принимает значения от 0 до 4095 и имеет длительность 10 мс. Временная ось 402 узла В 404 разделена на номера кадров узла В (упоминаемые в дальнейшем как "НКВ"). Подобно НКК, НКВ также принимает значения от 0 до 4095 и имеет длительность 10 мс. На фиг.4 НКК и НКВ не синхронизированы.
Процесс синхронизации узлов представляет собой процедуру получения информации о временной оси 402 узла В 404 посредством КРС 403. Процесс синхронизации узлов выполняется при помощи следующих этапов.
КРС 403 передает кадр 405 синхронизации узлов нисходящей линии (НЛ) для синхронизации узлов на конкретный узел В 404 (этап а). После приема кадра 405 синхронизации узлов НЛ, передаваемого от КРС 403, узел В 404 передает кадр 406 синхронизации узлов восходящей линии (ВЛ) на КРС 403 в ответ на принятый кадр 405 синхронизации узлов НЛ (этап b). После приема кадра 406 синхронизации узлов ВЛ КРС 403 получает информацию о временной оси 402 узла 404 посредством определения оценки для разности моментов времени между НКК и НКВ (этап с).
Ниже подробно описываются соответствующие этапы процесса синхронизации узлов.
На этапе а КРС 403 вводит временную величину Т1 на временной оси 401, где должен передаваться кадр 405 синхронизации узлов НЛ, в кадр 405 синхронизации узлов НЛ и передает кадр 405 синхронизации узлов НЛ с введенной временной величиной Т1 на узел В 404. Временная величина Т1 представляет собой временную величину, измеряемую посредством 0,250 мс на временной оси 401. Например, на фиг.4 временная величина Т1, где должен передаваться кадр 405 синхронизации узлов НЛ, составляет 40941,250 мс. 40941,250 мс означает, что кадр 405 синхронизации узлов НЛ передается через 1,250 мс после момента времени начала НКК 4094.
На этапе b узел В 404 принимает кадр 405 синхронизации узлов НЛ, передаваемый от КРС 403, и идентифицирует временную величину Т1. Далее, узел В 404 определяет временную величину Т2 на временной оси 402, представляющую момент времени, когда был принят кадр 405 синхронизации узлов НЛ. По истечении заранее определенного времени узел В 404 передает на КРС 403 кадр 406 синхронизации узлов ВЛ, включающий в себя временную величину Т3, представляющую собой момент времени, когда должны передаваться Т1, Т2 и кадр 406 синхронизации узлов ВЛ. Подобно Т1, временные величины Т2 и Т3 также представляют временные величины, измеряемые посредством 0,250 мс. Например, предполагается, что Т2 составляет 1492,500 мс и Т3 - 1505,000 мс. Т2 показывает, что узел В 404 принял кадр 405 синхронизации узлов НЛ через 2,5 мс после НКВ 149. Т3 показывает, что узел В 404 начал передачу кадра 406 синхронизации узлов ВЛ через 5 мс после НКВ 150.
На этапе с КРС 403 принимает кадр 406 синхронизации узлов ВЛ и выделяет Т2 и Т3 из принятого кадра 406 синхронизации узлов ВЛ. Посредством приема кадра 406 синхронизации узлов ВЛ КРС 403 идентифицирует временную величину Т4, представляющую момент времени его приема. В результате КРС 403 может идентифицировать Т1, Т2, Т3 и Т4.
КРС 403 может вычислить время двойного прохода кадра (ВДПК) между КРС 403 и узлом В 404, основываясь на Т1, Т2, Т3 и Т4. Время двойного прохода кадра (ВДПК) может быть вычислено по
уравнению (1):
ВДПК=Т4-Т1-(Т3-Т2).
Как показано в уравнении (1), время двойного прохода кадра может быть определено как сумма времени, необходимого для передачи кадра 405 синхронизации узлов НЛ от КРС 403 на узел В 404, и времени, необходимого для передачи кадра 406 синхронизации узлов ВЛ от узла В 404 на КРС 403.
КРС 403 может вычислить задержку при передаче в одном направлении (ЗПОН) посредством времени двойного прохода кадра. Т.е. величина, определяемая как половина времени двойного прохода кадра, как можно предположить, равна задержке при передаче в одном направлении. Из уравнения (1) задержка при передаче в одном направлении ЗПОН может быть представлена
уравнением (2):
ЗПОН=[Т4-Т1-(Т3-Т2)]/2.
Задержка при передаче в одном направлении, представляемая уравнением (2), показывает время, необходимое для передачи конкретного кадра от КРС 403 на узел В 404, или от узла В 404 на КРС 403. Для того чтобы предположить, что задержка при передаче в одном направлении равна 1/2 времени двойного прохода кадра, задержка при передаче в одном направлении по восходящей линии должна быть идентична задержке при передаче в одном направлении по нисходящей линии. Однако, в общем случае, так как задержка при передаче в одном направлении по восходящей линии отличается от задержки при передаче в одном направлении по нисходящей линии, то задержка при передаче в одном направлении, вычисленная из уравнения (2), представляет собой оценочную, а не точную величину.
КРС 403 может определить зависимость между НКК, т.е. временной осью 401 в КРС 403, и НКВ, т.е. временной осью 402 в узле В 404, посредством использования времени двойного прохода кадра. Т.е. Т2 становится временной величиной в момент времени, когда задержка при передаче в одном направлении прошла после Т1. Например, на фиг.4 отмечается, что Т2 в момент времени, когда прошла задержка при передаче в одном направлении от Т1 (=40941,250), становится равной 14941,250. Если предполагается, что Т4 равна 33 (Т4=33), то задержка при передаче в одном направлении становится 51,75/2. Таким образом, Т2 (=1492,500) на временной оси 402 узла В 404 может быть представлена уравнением (3) на временной оси 401 КРС 403.
Уравнение (3):
Т1(=40941,250)+51,75/2=40967,125.
Т2(=40967,125) на временной оси 401 КРС 403, вычисленная из уравнения (3), может быть выражена как 7,125 посредством операции по модулю. Необходимость выполнения операции по модулю связана с тем, как указано выше, что НКК на временной оси 401 КРС 403 имеет величину от 0 до 4095. Поэтому разность между временной осью 402 узла В 404 и временной осью 401 КРС 403 может быть вычислена из
уравнения (4):
(временная ось узла В)-(временная ось КРС)=1492,5-7,125=1485,375.
Поэтому обобщая, уравнение (4) может быть выражено как
уравнение (5):
(временная ось узла В)-(временная ось КРС)=Т2-(Т1+[Т4-Т1-(Т3-Т2)]/2)=1/2(2Т2-2Т1-Т4+Т1+Т3-Т2)=1/2(Т2-Т1-Т4+Т3).
Как описано выше, величина разности между временной осью 401 КРС 403 и временной осью 402 узла В 404 является точной величиной, когда задержка при передаче в одном направлении по нисходящей линии идентична задержке при передаче в одном направлении по восходящей линии. Однако, в общем случае, так как задержка при передаче в одном направлении по нисходящей линии не идентична задержке при передаче в одном направлении по восходящей линии, то величина разности не является точной величиной. Для того чтобы решить эту проблему, кадру синхронизации узлов НЛ и кадру синхронизации узлов ВЛ во время их передачи дается наивысший приоритет. Данная мера призвана учитывать только чистую задержку передачи в виде задержек при передаче в одном направлении по нисходящей и восходящей линии посредством минимизации задержек передачи кадра синхронизации узлов НЛ и кадра синхронизации узлов ВЛ. В результате задержка при передаче в одном направлении по нисходящей линии может быть в достаточной степени аналогична задержке при передаче в одном направлении по восходящей линии.
Временная зависимость между временной осью 402 узла В 404 и временной осью 401 КРС 403, оцененная процессом синхронизации узлов, определяется в соответствии с тем, насколько близка задержка при передаче в одном направлении по нисходящей линии задержке при передаче в одном направлении по восходящей линии. Т.е. можно определить, правильна ли временная зависимость между временной осью 402 узла В 404 и временной осью 401 КРС 403 даже на основе канального интервала или на основе кадра. В нижеследующем описании рассматривается случай, когда оценка является правильной на основе канального интервала, и случай, когда оценка является правильной на основе кадра. Процесс синхронизации узлов может быть выполнен либо периодически, либо до или после передачи данных.
2. Процедура измерения для мягкой передачи обслуживания ТА в услуге МВМУ и процедура синхронизации моментов времени передачи данных в узле В
В настоящем изобретении предполагается, что синхронизация на основе канального интервала или кадра между КРС и узлом В уже была достигнута, когда смещение МВМУ определяется ошибкой измерения (или разностью НСК-НСК) от ТА или узла В, представляя разность моментов времени единицей чипа между ближайшими канальными интервалами или кадрами. Синхронизация на основе канального интервала или кадра между КРС и узлом В, как описано выше, может достигаться процедурой синхронизации узлов. Кроме того, в настоящем изобретении предполагается, что соответствующие узлы В имеют одинаковый радиус соты. Поэтому ТА, расположенные на одинаковом расстоянии от двух сот, могут принимать данные одновременно, когда две соты передают данные одновременно. Наконец, в нижеследующем описании настоящего изобретения ссылка делается только на вопросы, обязательно необходимые для понимания изобретения. Описание случая, когда две соты имеют различные радиусы, не приводится, так как это можно рассматривать как расширение объема изобретения.
Процесс синхронизации моментов времени, когда соты передают одинаковые данные МВМУ, и выполнения каждым ТА мягкой передачи обслуживания, или мягкого объединения, синхронизируемых данных МВМУ, может выполняться следующими этапами.
Этап 1: измерение наблюдаемой разности моментов времени НСК-НСК с целью определения временной информации для узлов В в пределах действия одного КРС и подачи наблюдаемой разности моментов времени НСК-НСК на КРС.
Этап 2: анализ посредством КРС временной зависимости между узлами В, основываясь на наблюдаемой разности моментов времени НСК-НСК, полученной на этапе 1, и определение смещения МВМУ, необходимого для узлов В.
Этап 3: подача смещения МВМУ, определенного на этапе 2, на соответствующие узлы В и соответствующий ТА.
Этап 4: предварительная передача данных для определения временной зависимости между КРС и узлом В перед передачей данных МВМУ, так что узел В может передавать данные в соответствии со смещением МВМУ, определенном на этапе 3 (синхронизация абонентской плоскости).
Этап 5: передача данных МВМУ в соответствии с временной зависимостью, определенной на этапе 4.
Ниже подробно описываются отдельные соответствующие этапы со ссылкой на предпочтительные варианты выполнения и прилагаемые чертежи.
Вышеупомянутые этапы, вместе с вышеуказанным процессом синхронизации узлов для определения зависимости между моментами времени в КРС и моментами времени в узле В между КРС и узлом В, могут быть необходимы для вышеуказанных этапов и передачи данных МВМУ. Альтернативно, процесс синхронизации узлов может быть выполнен предварительно между КРС и узлом В независимо от вышеупомянутых этапов.
Процедура мягкой передачи обслуживания МВМУ вышеупомянутыми этапами может быть разделена на способ (первый вариант выполнения) измерения наблюдаемой разности моментов времени НСК-НСК ТА посредством ТА и другой способ (второй вариант выполнения) измерения наблюдаемой разности моментов времени НСК-НСК узла В посредством узла В.
Ниже подробно описывается процедура мягкой передачи обслуживания МВМУ при предположении, что ТА расположен в области мягкой передачи обслуживания, где он может одновременно принимать данные МВМУ от двух узлов В.
3. Варианты выполнения
3-1. Первый вариант выполнения (наблюдаемая разность моментов времени НСК-НСК, передаваемая от ТА на КРС)
В соответствии с вышеуказанными этапами ниже представлено описание процедуры выполнения мягкой передачи обслуживания в асинхронной системе подвижной связи в соответствии с вариантом выполнения настоящего изобретения.
Сначала приводится подробное описание этапа 1, т.е. измерения наблюдаемой разности моментов времени НСК-НСК ТА посредством ТА для определения временной информации для узла В в пределах действия одного КРС и подачи измеренной наблюдаемой разности моментов времени НСК-НСК ТА на КРС.
Для того чтобы измерить наблюдаемую разность моментов времени НСК-НСК ТА от ТА, КРС может либо выбрать конкретный ТА для измерения, либо определить величину, учитывая статистику величин измерения, принимаемых от нескольких ТА, в качестве наблюдаемой разности моментов времени НСК-НСК ТА. Для того чтобы конкретный ТА мог измерять наблюдаемую разность моментов времени НСК-НСК ТА, КРС должен выбрать конкретный ТА. Конкретный ТА может быть выбран посредством величины отношения сигнал-шум (упоминаемой в дальнейшем как "ОСШ") общего пилотного канала (упоминаемого в дальнейшем как "ОПК"), принимаемого на ТА от узла В. Т.е. КРС позволяет ТА измерить информацию в момент времени, когда КРС передает данные МВМУ на множество узлов В, так что ТА, принимающий данные МВМУ от множества узлов В, т.е. ТА, для которого требуется мягкая передача обслуживания, может принимать данные МВМУ от узлов В в пределах минимальной разности моментов времени. КРС может выбрать ТА, как определено, расположенный в области передачи обслуживания, посредством величины ОСШ ОПК, принимаемого от узла В, и может разрешить ТА измерить наблюдаемую разность моментов времени НСК-НСК ТА.
Наблюдаемая разность моментов времени НСК-НСК ТА, измеренная посредством ТА, расположенным в области передачи обслуживания, где он одновременно принимает данные от множества узлов В, может быть определена как
уравнение (6):
наблюдаемая разность моментов времени НСК-НСК ТА =OFFх38400+Tm.
Здесь предполагается, что первый узел В и второй узел В, соответствующие множеству узлов В, передают данные МВМУ на ТА. В уравнении (6) Tm обозначает смещение кодового элемента сигнала (в дальнейшем чипа) и может быть определена как
уравнение (7):
Tm=TRxHCKj-TRxHCKi.
Единицей измерения Tm, определяемой уравнением (7), является чип и имеет эффективную область [0, 1,... 38999]. В уравнении (7) TRxHCKj представляет момент времени начала конкретного кадра первичного общего физического канала управления (ПОФКУ), принимаемого от jой соты, и TRxHCKi представляет момент времени начала кадра ПОФКУ, который ТА принял от iой соты перед TRxHCKj. Предполагается, что jая сота соответствует первому узлу В, тогда как iая сота соответствует второму узлу В. В уравнении (6) OFF обозначает смещение единицами кадра и определяется как
уравнение (8):
OFF=(НСКj-НСКi) по модулю 256.
В уравнении (8) эффективная область OFF составляет [0, 1, ... 255]. Кроме того, НСКj представляет номер кадра ПОФКУ нисходящей линии, который ТА принял от jой соты (или первого узла В) в момент времени TRxHCKj, и НСКi представляет номер кадра ПОФКУ нисходящей линии, который ТА принял от iой соты (или второго узла В) в момент времени TRxHCKi. Поэтому TRxHCKj представляет момент времени начала кадра, соответствующего НСКj, тогда как TRxHCKi представляет момент времени начала кадра, соответствующего НСКi. Выбор ТА, который будет измерять наблюдаемую разность моментов времени НСК-НСК ТА, был описан подробно совместно с описанием процедуры определения того, что конкретный ТА расположен в области передачи обслуживания.
ТА, сообщающий измеренную наблюдаемую разность моментов времени НСК-НСК ТА на КРС, может дополнительно сообщить информацию о мощности ОПК для узлов В, на которых выполняется измерение. Информация о мощности может быть использована КРС в процессе определения конкретного положения между двумя узлами В, где расположен ТА. Т.е., если уровень мощности ОПК от первого узла В выше, чем уровень мощности ОПК от второго узла В, то КРС может определить, что ТА расположен ближе к первому узлу В, чем ко второму узлу В. Этот пример соответствует тому случаю, когда мощность передачи ОПК первого узла В идентична мощности передачи ОПК второго узла В. Когда уровни мощности ОПК от узлов В отличаются друг от друга, так как КРС предварительно располагает информацией о разной мощности, КРС может определить положение ТА, используя информацию о передаваемой мощности в дополнение к мощности, которую принял ТА. Однако так как является важной мощность приема ОПК ТА, то предпочтительно предположить, что, если уровни принимаемой мощности ОПК идентичны друг другу, то ТА расположен в области мягкой передачи обслуживания.
Наблюдаемая разность моментов времени НСК-НСК ТА, вычисленная на этапе 1, подается от ТА на КРС, с использованием сообщения управления радиолинией (упоминаемое в дальнейшем как "УРЛ"). Наблюдаемая разность моментов времени НСК-НСК ТА, подаваемая на КРС, представляет собой информацию о зависимости между величинами временной оси (или НСК) узлов В.
Ниже представлено подробное описание этапа 2, т.е. определения временной зависимости между узлами В в зависимости от величин НСК, вычисленных на этапе 1, и определения смещений МВМУ, подлежащих подаче на соответствующие узлы В. Также и при описании этапа 2 предполагается, что, так как две соты имеют одинаковый радиус сот, то область передачи обслуживания определяется с центром в точке, расположенной на одинаковом расстоянии от двух узлов В. Т.е. предполагается, что, так как уровни мощности передачи двух узлов В идентичны друг другу, то и расстояния от узлов В также идентичны друг другу. Поэтому данные, передаваемые двумя узлами В с одинаковой мощностью, поступают на ТА одновременно. Когда две соты имеют различные радиусы сот, определение момента времени передачи этих же данных МВМУ может быть дополнительно выполнено с использованием мощности от двух сот. Т.е., если две соты имеют разные радиусы, информация об уровнях мощности может быть дополнительно использована при определении момента времени передачи данных МВМУ.
Когда наблюдаемая разность моментов времени НСК-НСК ТА принимается от конкретного ТА на этапе 1, наблюдаемая разность моментов времени НСК-НСК ТА представляет собой величину, представляемую уравнением (6). Наблюдаемая разность моментов времени НСК-НСК ТА может быть определена как разность между моментами времени передачи двух узлов В в конкретный момент времени и может быть представлена
уравнением (9):
наблюдаемая разность моментов времени НСК-НСК ТА = момент времени передачи узла В №1 - момент времени передачи узла В №2.
В уравнении (9) "момент времени передачи" означает временную ось на стороне передачи в отношении сот узлов В, представленных посредством НСК, и может рассматриваться на основе чипа. Т.е. момент времени передачи принимает величину от 0 до 256х38400ого чипа. Если момент времени передачи имеет величину от 0 до 38400ого чипа (0≤момент времени передачи≤38400ого чипа), может быть указано, что передача выполняется в НСК(1), и если момент времени передачи имеет величину между НСКх38400ым чипом и (НСК+1)х38400ым чипом (nх38400ого чипа≤момент времени передачи≤(n+1)х38400ого чипа), может быть указано, что передача выполняется с НСК(n).
В уравнении (9) предполагается, что jой сотой является сота №1 (или первый узел В), и предполагается, что iой сотой является сота №2 (или второй узел В). В этом случае OFF(=НСКj-НСКi по модулю 256) представляет разность в кадрах между сотой №1 и сотой №2, и Tm представляет разность между соседними кадрами соты №1 и соты №2.
КРС может выбрать конкретную соту для передачи данных передачи в один и тот же момент времени как НСК выбранной соты. Т.е. НКС, представляющий последовательность данных, может быть зафиксирован на НСК, указывающим момент времени передачи данных. Смещение МВМУ, разность между однозначным номером "НКС" данных передачи и моментом времени передачи данных с НКС, может быть определено
уравнением (10):
смещение МВМУ=(момент времени передачи - НКС)=0.
Данные, передаваемые от КРС на узел В в соответствии с уравнением (10), передаются в НСК, имеющим ту же самую величину, что и соответствующий НКС. НСК имеет величину от 0 до 4095, и НКС имеет величину от 0 до 255. Таким образом, когда НСК превышает 255, если остаток, определяемый в результате деления НСК на 256, идентичен НКС, то определяется, что НСК равен НКС.
Также можно передавать данные с НКС на конкретную соту посредством применения максимальной разности моментов времени, что и величина смещения МВМУ вместо передачи данных в момент времени НСК, имеющий ту же самую величину, как описано в связи с вышеупомянутым способом. Величина смещения МВМУ может быть вычислена по
уравнению (11):
смещение МВМУ=(момент времени передачи - НКС)=OFF0 х 38400 + смещение_чипа.
В уравнении (11) OFF0 имеет конкретную величину от 0 до 255 и может быть определена при помощи КРС, и смещение_чипа имеет величину от 0 до 38399 (0≤смещение_чипа≤38399) и также может быть определена при помощи КРС. Т.е. посредством определения конкретной величины смещения в результате выбора конкретного узла В можно, предпочтительно, установить зависимость между НКС для данных и моментом времени передачи выбранного узла В.
Ради удобства в описании предполагается, что выбранной конкретной сотой в этом случае является первый узел В (или сота №1). Т.е. КРС устанавливает НКС, соответствующий номеру данных, учитывая НСК соты №1 (или первого узла В). Как описано выше, предполагается, что НКС и НСК установлены и имеют одинаковые величины. Т.е. КРС определяет передачу данных с НКС, имеющим одинаковую величину в НСК момента времени соты №1.
Если определена зависимость между НКС и НСК для одной соты, как указано в связи с вышеописанным примером, величина смещения МВМУ, представляющая зависимость между НКС, т.е. однозначным номером данных, подлежащих передаче на соту №1, для соты №2, совместно использующей область передачи обслуживания с сотой №1, и НСК, т.е. временной осью соты №2, может быть определена с использованием наблюдаемой разности моментов времени НСК-НСК соты №1 и соты №2, принятой на шаге 1.
Когда наблюдаемая разность моментов времени НСК-НСК соты №1 и соты №2 определяется посредством OFFх38400+Tm, как описано в связи с вышеупомянутым примером, и зависимость между НСК момента времени передачи соты №1 и НКС однозначного номера данных МВМУ определяется при помощи "момент времени передачи по модулю 256 = НКС", как описано в связи с вышеупомянутым предположением, то тогда величина смещения МВМУ для соты №2 может быть определена
уравнением (12):
смещение МВМУ=(момент времени передачи соты №2 - НКС) = OFFх38400+Tm.
Поэтому в соте №1 данные, имеющие конкретную величину НКС, передаются в НСК, имеющим ту же самую величину, что и НКС, и в соте №2 данные передаются в момент времени передачи, имеющим величину, определяемую суммой НКС и OFFх38400+Tm, как показано в уравнении (12). Так как разность моментов времени между сотой №1 и сотой №2 может быть вычислена посредством OFFх38400+Tm в результате измерения на этапе 1, можно заметить, что НКС передается с каждой соты в один и тот же момент времени.
В общем случае, когда момент времени передачи не является идентичным НКС в соте №1, как показано в вышеупомянутом примере, и имеет заранее определенное смещение, представленное уравнением (11), момент времени передачи соты №2 может быть вычислен
уравнением (13):
смещение МВМУ = (момент времени передачи соты №2 - НКС)
= (момент времени передачи соты №2 - момент времени передачи соты №1) + (момент времени передачи соты №1 - НКС)
= (наблюдаемая разность моментов времени НСК-НСК между сотой №1 и сотой №2) + (смещение МВМУ соты №1)
= (OFF х 38400 + Tm) + (OFF0 х 38400 + смещение_чипа).
Согласно уравнению (11) и уравнению (13) момент времени передачи одного НКС каждого узла В равен "момент времени передачи соты №1 = НКС + OFF0 х 38400 + смещение_чипа" для соты №1 и "момент времени передачи соты №2 = НКС + OFF х 38400 + Tm + OFF0 х 38400 + смещение_чипа" для соты №2. Так как разность моментов времени передачи между сотой №1 и сотой №2 равна "OFF х 38400 + Tm", т.е., так как "момент времени передачи соты №2 - момент времени передачи соты №1 = OFF х 38400 + Tm", то можно понять из вышеуказанной формулы, что одинаковые НКС передаются в одно время.
Подводя итог, зависимость между моментом времени передачи соты в одном узле В и НКС определяется уравнением (10) или уравнением (11). Когда уже дана зависимость между НКС и моментом времени передачи, то этот процесс может быть опущен. Если определена зависимость между моментом времени передачи одной соты и НКС, то зависимость между моментом времени передачи соседней соты и НКС определяется для сот, которые являются соседними с сотой, посредством использования наблюдаемой разности моментов времени НСК-НСК, полученной на этапе 1 из временной зависимости между сотами. Также и для другой соты, соседней с этой сотой, зависимость между моментом времени передачи и НКС может быть определена этим же самым процессом посредством использования уравнения (12) или уравнения (13).
В настоящем изобретении зависимость между моментом времени передачи и НКС упоминается как "смещение МВМУ". Смещение МВМУ может быть определено посредством КРС в результате выполнения вышеупомянутого процесса на сотах узлов В.
Ниже приводится подробное описание этапа 3 подачи величины смещения МВМУ, определенной на этапе 2, на соответствующие узлы В и соответствующие ТА.
Величина смещения МВМУ соты (или узла В), определенная посредством КРС, передается на ТА и узел В посредством сообщения УРЛ и сообщения прикладной части узла В (ПЧУВ) соответственно. Смещение МВМУ, определенное КРС, может быть передано либо на соответствующий узел В, либо на узел В, на который не передаются в настоящий момент данные МВМУ, для того чтобы одновременно контролировать момент времени передачи на нескольких узлах В. Т.е. для того чтобы определить для каждого узла В моменты времени передачи данных МВМУ, подлежащих синхронизации, смещение МВМУ, подлежащее учету в каждой соте, предварительно передается на несколько узлов В, так что они предварительно информированы о смещении МВМУ. Поэтому, в результате предварительного учета смещения МВМУ между соседними узлами В, узел В использует смещение МВМУ для определения момента времени передачи данных МВМУ при подготовке к передаче обслуживания ТА или при запуске услуги МВМУ. При получении величины смещения МВМУ узел В и ТА определяют момент времени передачи данных в соответствии с принятой величиной смещения МВМУ, тем самым позволяя производить мягкое объединение одинаковых данных, передаваемых от нескольких сот.
Как показано на фиг.2, когда ТА принимает смещение МВМУ (первое смещение МВМУ) для соты №1 и смещение МВМУ (второе смещение МВМУ) для соты №2, сигнал, принимаемый от соты №1 в "НСК(k) + первое смещение МВМУ", и сигнал, принимаемый от соты №2 в "НСК(k) + второе смещение МВМУ", представляют собой одинаковые данные. Сигналы могут быть мягко объединены. В вышеупомянутых формулах k в НСК(k) может принимать значения от 0 до 4095. Тем временем, сообщение на установку однонаправленного радиоканала передачи данных и сообщение на установку радиолинии доступны для сообщения УРЛ и сообщения ПЧУВ, используемых, соответственно, в процедуре передачи смещения МВМУ. Конечно, может быть изменен формат сообщений для передачи смещений МВМУ на ТА и узел В.
Ниже приводится подробное описание этапа 4 (этапа синхронизации абонентской плоскости) определения временной зависимости между КРС и узлом В перед передачей данных МВМУ, так что узел В может передавать данные в соответствии со смещением МВМУ, определенным на этапе 3.
Процесс синхронизации абонентской плоскости представляет собой процесс синхронизации потоков данных нисходящего выделенного канала или поддержание или восстановление текущего состояния синхронизации и выполняется на транспортном однонаправленном широкополосном канале lur передачи данных, т.е. протоколе между КРС и КРС, и на транспортном однонаправленном канале lub передачи данных, т.е. протоколе между КРС и узлом В. В общем случае, процесс синхронизации абонентской плоскости для конкретной радиолинии выполняется для синхронизации всех транспортных однонаправленных каналов передачи данных для соответствующей радиолинии.
Синхронизация абонентской плоскости, фактически, представляет собой процесс определения момента времени передачи КРС, т.е. момента времени НКК таймера КРС, где соответствующий кадр данных должен копироваться и передаваться, когда КРС собирается передать свой определенный кадр данных на ТА с запланированным НСК узла В. Этот процесс описывается со ссылкой на фиг.3. На фиг.3 позиция 301 представляет моменты времени КРС. КРС, фактически, собирается передать НКС(12) в течение определенного периода времени узла В, представленного позицией 303. Для того чтобы сделать возможным такую передачу, должен быть определен момент времени, когда должен передаваться соответствующий НКС(12). Поэтому, как представлено позицией 302, КРС передает временную информацию о НКС(12) на узел В вместе с сигналом синхронизации НЛ. Узел В предварительно устанавливает время 304 момента начала окна поступления (ВМНОП) и время 305 момента окончания окна поступления (ВМООП) посредством использования сигнала управления. Окно поступления устанавливается для того, чтобы гарантировать оптимальный период времени, в течение которого узел В принимает определенное сообщение и затем выполняет стабильную повторную передачу соответствующего сообщения посредством подходящего процесса. Когда сообщение, переданное КРС, поступает в течение соответствующего периода времени, узел В вычисляет время 306 поступления (ВП), разность моментов времени между моментом времени, когда передаваемое сообщение поступило, и ВМООП 305. В этом случае ВП имеет положительную величину. Вычисленное ВП передается на КРС, используя сообщение синхронизации ВЛ. Основываясь на ВП в сообщении синхронизации ВЛ, КРС определяет, что передача выполняется нормально, и затем непрерывно выполняет передачу данных. Когда сообщение, передаваемое КРС, поступает на узел В после ВМООП 306, вычисленное ВП имеет отрицательную величину, и КРС продвигает вперед передачу НКС(12), основанную на ВП, тем самым передавая НКС(12) так, как представлено позицией 303. В противоположном случае, т.е. когда сообщение, передаваемое КРС, поступает до ВМНОП 304, вычисленное ВП больше окна поступления и КРС задерживает передачу НКС(12), основанную на ВП.
3-2. Второй вариант выполнения (измерение узлом В)
В соответствии с вышеуказанными этапами ниже приведено описание процедуры выполнения мягкой передачи обслуживания в асинхронной системе подвижной связи в соответствии с другим вариантом выполнения настоящего изобретения.
Сначала приводится подробное описание этапа 1, т.е. измерения наблюдаемой разности моментов времени НСК-НСК узла В посредством узла В для определения временной информации для узлов В в пределах действия одного КРС и подачи измеренной наблюдаемой разности моментов времени НСК-НСК узла В на КРС.
Относительная временная информация между узлами В, измеренная узлом В, т.е. наблюдаемая разность моментов времени НСК-НСК узла В, определяется уравнением (14) аналогично способу измерения наблюдаемой разности моментов времени НСК-НСК посредством ТА в первом варианте выполнения.
Уравнение (14):
Наблюдаемая разность моментов времени НСК-НСК узла В = TОПКRxj-TОПКRxi.
В уравнении (14) TОПКRxi представляет момент времени начала конкретного канального интервала первичного ОПК на временной оси узла В, который измеряет наблюдаемую разность моментов времени НСК-НСК узла В, и TОПКRxj представляет момент времени, ближайший к TОПКRxi из числа моментов времени начала канального интервала первичного ОПК, принимаемого от соты аналогичного узла В.
Как показано на фиг.2, позиция 206 соответствует наблюдаемой разности моментов времени НСК-НСК узла В, измеренной в соте №1. Здесь TОПКRxi соответствует моменту времени начала передачи канального интервала №1 с НСК(3) на временной оси 208 соты №1, и TОПКRxj соответствует моменту времени начала приема канального интервала №7 с НСК(15) из числа блоков данных, передаваемых от соты №2 на временной оси 209 соты №1. Другое определение наблюдаемой разности моментов времени НСК-НСК узла В будет дано со ссылкой на фиг.2. TОПКRxj, измеренная на временной оси 210 соты №2, представляет момент времени, когда сота №2 начинает принимать канальный интервал первичного ОПК от соты №1. Аналогично, TОПКRxi представляет момент времени начала передачи канального интервала первичного ОПК, передаваемого сотой №2 в момент времени, ближайший к TОПКRxj, на временной оси 211 соты №2. В настоящем изобретении два определения могут быть использованы совместно. Два определения обеспечивают одинаковые величины измерения, и позиции 206 и 207 на фиг.2 соответствуют величинам измерений. Минимальной единицей наблюдаемой разности моментов времени НСК-НСК узла В, определенной уравнением (14), является чип, и ее эффективная область может быть определена как [-1280, ... 1279, 1280].
Хотя выше было дано определение наблюдаемой разности моментов времени НСК-НСК узла В между канальными интервалами ОПК, также может быть дано определение наблюдаемой разности моментов времени НСК-НСК узла В между кадрами ОПК. Для измерения наблюдаемой разности моментов времени НСК-НСК узла В определение разности между моментами времени начала кадров может быть дано в виде
уравнения (15):
наблюдаемая разность моментов времени НСК-НСК узла В = TОПКRxj - ТОПКRxi.
В уравнении (15) TОПКRxi представляет момент времени начала конкретного кадра первичного ОПК на временной оси узла В, который измеряет наблюдаемую разность моментов времени НСК-НСК узла В, и ТОПКRxj представляет момент времени, ближайший к ТОПКRxi из числа моментов времени начала кадров первичного ОПК, принимаемого от соты аналогичного узла В. Минимальной единицей наблюдаемой разности моментов времени НСК-НСК узла В, определенной уравнением (15), является чип или единица меньшая, чем чип, и ее эффективная область может быть определена как [-19200,0000 ... 19200,0000] для единицы чипа.
В случае измерения узлом В, каждый узел В может передавать принимаемую мощность ОПК с других узлов В на КРС вместе с величиной измерения. Причина передачи информации о принимаемой мощности ОПК заключается в том, что, когда уровни мощности передачи ОПК от двух сот отличаются друг от друга, то область передачи обслуживания не может быть определена с центром на ТА, расположенным на одинаковом расстоянии от двух сот. В общем случае, область передачи обслуживания определяется с центром в точке, в которой уровни принимаемой мощности от двух соседних сот идентичны друг другу. Однако, когда уровни мощности передачи от двух сот отличаются друг от друга, даже если ТА расположен на одинаковом расстоянии от двух сот, уровни принимаемой мощности ОПК, принимаемых от соответствующих сот, отличаются друг от друга. Хотя уровни мощности передачи от двух сот отличаются, сигналы ОПК от сот могут приниматься с одинаковой мощностью на ТА, расположенным в области передачи обслуживания. Это означает, что, хотя ТА расположен в области передачи обслуживания, он расположен на различных расстояниях от двух сот. Т.е. можно рассматривать, что ТА расположен ближе к соте, имеющей относительно более низкую мощность передачи. В этом случае необходимо, чтобы сота, имеющая относительно более низкую мощность передачи, предпочтительно передавала данные МВМУ, а не две соты передавали данные МВМУ в один и тот же момент времени. Поэтому каждый узел В может передавать принимаемую мощность ОПК аналогичной соты на КРС вместе с величиной измерения.
Ниже приводится подробное описание этапа 2, т.е. определения смещения МВМУ, подлежащего подачи на каждый узел В в зависимости от соотношения между величинами НСК, вычисленными на этапе 1, в котором величины измерений, вычисленные на этапе 1, представляют информацию о соотношении между величинами временной оси (или НСК) соответствующих узлов В.
Описание способа измерения узлом В дано отдельно со ссылкой на тот случай, когда наблюдаемая разность моментов времени НСК-НСК узла В определяется как разность моментов времени между канальными интервалами ОПК и когда наблюдаемая разность моментов времени НСК-НСК узла В определяется как разность моментов времени между кадрами ОПК. Кроме того, предполагается, что, когда наблюдаемая разность моментов времени НСК-НСК узла В определяется как разность моментов времени между канальными интервалами ОПК, то КРС уже информирована о разности моментов времени передачи каждого узла В даже на основе канального интервала посредством процедуры синхронизации узлов. Поэтому КРС может дополнительно выполнить процесс уточнения синхронизации между двумя узлами В, разность моментов времени передачи которых уже известна даже на основе канального интервала в результате измерения узлом В.
На фиг.2 изображена временная зависимость между различными сотами в пределах двух узлов В и наблюдаемая разность моментов времени НСК-НСК. КРС принимает наблюдаемую разность моментов времени НСК-НСК узла В, получаемую в результате измерения узлом В, от каждого узла В. Например, на фиг.2 сота №1 узла В№1 и сота №2 узла В№2 являются соседними друг другу, и КРС принимает наблюдаемую разность моментов времени НСК-НСК узла В от узла В№1 и узла В№2.
Первый узел В 202 принимает ОПК, передаваемый от соты №2 второго узла В 203, измеряет наблюдаемую разность 206 моментов времени НСК-НСК и передает результирующую величину на КРС 201. Наблюдаемая разность моментов времени НСК-НСК, передаваемая первым узлом В 202, определяется как первый НСКразн 206. Аналогично, второй узел В 203 принимает ОПК, передаваемый от соты №1 второго узла В 202, измеряет наблюдаемую разность 207 моментов времени НСК-НСК и передает результирующую величину на КРС 201. Наблюдаемая разность моментов времени НСК-НСК, передаваемая вторым узлом В 203, будет определяться как второй НСКразн 207.
На фиг.2 позиция 208 представляет НСК момента времени передачи, когда сота №1 начинает передачу канального интервала ОПК, и позиция 209 представляет момент времени, когда сота №1 начинает прием канального интервала ОПК от соты №2. Кроме того, позиция 211 представляет НСК момента времени передачи, когда сота №2 начинает передачу канального интервала ОПК, и позиция 210 представляет момент времени, когда сота №2 начинает прием канального интервала ОПК от соты №1.
Поэтому на фиг.2 первый НСКразн, измеренный первым узлом В 202, может измеряться как величина, представленная позицией 206, тогда как второй НСКразн, измеренный вторым узлом В 203, может измеряться как величина, представленная позицией 207.
Так как КРС 201, как указано выше, известна временная зависимость между сотой №1 и сотой №2 даже на основе канального интервала, можно предположить на фиг.2, что КРС 201 иинформирован о том, что канальный интервал №1 НСК(3) соты №1 синхронизирован с канальным интервалом №7 НСК(15) соты №2. Поэтому КРС 201 может выполнять более уточненную синхронизацию момента времени передачи посредством использования первого НСКразн 206, измеряемого и передаваемого первым узлом В 202, и второго НСКразн 207, измеряемого и передаваемого вторым узлом В 203.
На фиг.2 временная ось 208 соты №1 и временная ось 211 соты №2 не синхронизированы друг с другом. Т.е. канальный интервал №1 НСК(3) на временной оси 208 не синхронизирован правильно с канальным интервалом №7 НСК(15) на временной оси 211. Канальный интервал №7 НСК(15) опережает канальный интервал №1 НСК(3) на временной оси. Т.е. прием канального интервала №1 НСК(3) сотой №1 начинается в момент времени, когда передача канального интервала №7 НСК(15) сотой №2 была выполнена примерно наполовину.
Первый НСКразн 206 и второй НСКразн 207, измеренные узлами В, а затем переданные на КРС 201, могут отражать разность моментов времени между канальным интервалом №7 НСК(15) от соты №2 и канальным интервалом №1 НСК(3) от соты №1.
Уравнение (16)
Среднее 1 = (первый НСКразн - второй НСКразн)/2
Уравнение (17)
Среднее2 = (второй НСКразн - первый НСКразн)/2
При определении уравнения (16) и уравнения (17), зависимость между моментами времени передачи узлами В может быть правильно описана с использованием средних величин. Т.е. в случае соты №1 момент времени начала передачи, означающий момент времени, когда был фактически передан канальный интервал №7 НСК(15) от соты №2, может быть определен как "момент времени начала канального интервала №1 НСК(3) + среднее 1". Т.е. в случае фиг.2, так как среднее 1 имеет отрицательную величину, канальный интервал №7 НСК(15) от соты №2 начинается с величины среднее 1 до канального интервала №1 НСК(3) от соты №1.
Альтернативно, с точки наблюдения соты №2, при сравнении с канальным интервалом №7 НСК(15) от соты №2, канальный интервал №1 НСК(3) от соты №1 может быть определен как "момент времени начала канального интервала 7 НСК(15) + среднее2". Т.е. в случае фиг.2, так как среднее2 имеет положительную величину, канальный интервал №7 НСК(15) от соты №2 начинается с величины среднее2 после канального интервала №1 НСК(3) от соты №1 202.
Поэтому процесс установления зависимости между НСК одного узла В и НКС данных передачи и последующего установления зависимости между НСК и НКС следующего узла В, как было показано при описании первого варианта выполнения, может быть описан как процесс использования средних величин.
Предположим, что зависимость между НСК и НКС соты №1 установлена в виде
уравнения (18):
смещение МВМУ для соты №1 = (момент времени начала соты №1 - НКС) = OFF0 х 38400 + смещение_чипа.
Зависимость между НСК и НКС соты №2 может быть определена с использованием средней величины, как показано в уравнении (18). На фиг.2 КРС 201, как было предположено ранее, предварительно информирован о том, что синхронизация между канальным интервалом №1 НСК(3) от соты №1 и канальным интервалом №7 НСК(15) от соты №2 была выполнена даже на основе канального интервала в зависимости между временной осью 208 и временной осью 211.
Т.е. КРС 201 предварительно информирован о том, что
момент времени передачи соты №2 - момент времени передачи соты №1 = канальный интервал №7 НСК(15) - канальный интервал №1 НСК(3) = канальный интервал №6 + кадр №12
= 6 х 2560 + 12 х 38400 чипов.
Информация о синхронизации, однако, может иметь ошибку. Поэтому можно получить правильную информацию о синхронизации на основе чипа посредством использования средних величин. Это определяется как
уравнение (19):
момент времени передачи соты №2 - момент времени передачи соты №1 = 6 х 2560 + 12 х 38400 чипов + среднее2 = 6 х 2560 + 12 х 38400 чипов +(второй НСКразн - первый НСКразн)/2.
Поэтому величина смещения МВМУ для соты №2, т.е. выражение отношения между НКС и моментом времени передачи соты №2 может быть определено
уравнением (20):
смещение МВМУ для соты №2 = (момент времени передачи соты №2 - НКС) = (момент времени передачи соты №2 - момент времени передачи соты №1) + (момент времени передачи соты №1 - НКС) = (6 х 2560 + 12 х 38400 чипов + (второй НСКразн - первый НСКразн)/2 + (OFF0 х 38400 + смещение_чипа).
Из уравнения (20) следует, что, если определена зависимость между моментом времени передачи конкретной соты (сота №1 в уравнении 20) и НКС, зависимость между моментом времени передачи другой соседней соты и НКС может быть определена с использованием зависимости между моментом времени передачи конкретной соты (или соты №1) и НКС.
Когда наблюдаемая разность моментов времени НСК-НСК узла В определяется как разность моментов времени между кадрами ОПК, предполагается, что КРС уже информирован о разности моментов времени передачи каждого узла В даже на основе кадра посредством процедуры синхронизации узлов.
Поэтому КРС может дополнительно выполнить процесс уточнения синхронизации между двумя узлами В, разность моментов времени передачи которых уже известна даже на основе кадра, посредством измерения узлом В. Его подробное описание аналогично описанию того случая, когда наблюдаемая разность моментов времени НСК-НСК узла В определяется как разность моментов времени между канальными интервалами ОПК. Результирующее выражение дано
уравнением (21):
смещение МВМУ для соты №2 = (момент времени передачи соты №2 - НКС) = (момент времени передачи соты №2 - момент времени передачи соты №1) + (момент времени передачи соты №1 - НКС) = (кадровая разность между моментом времени передачи соты №2 и моментом времени передачи соты №1) + (второй НСКразн - первый НСКразн)/2 + (OFF0 х 38400 + смещение_чипа).
В уравнении (21) предполагается, что КРС уже известно (кадровая разность между моментом времени передачи соты №2 и моментом времени передачи соты №1) в результате процедуры синхронизации узлов. В уравнении (21) первый НСКразнКадр и второй НСКразнКадр, т.е. наблюдаемая разность моментов времени НСК-НСК, измеряемая каждым узлом В, представляют величину разности между моментом времени начала кадра в соте и моментом времени начала, ближайшим к моменту времени начала кадра в соте из числа кадров ОПК, принимаемых от аналогичной соты. В уравнении (21) предполагается, что разность между моментом времени передачи соты №1 и НКС предварительно определяется как (OFF0 х 38400 + смещение_чипа).
Этап 3 и этап 4 во втором варианте выполнения идентичны этапу 3 и этапу 4 первого варианта выполнения, так что их подробное описание повторно не приводится.
Подробное описание КРС, узла В и ТА в соответствии с указанными выше процедурами ниже приводится со ссылкой на прилагаемые чертежи.
4. Принцип действия вариантов осуществления изобретения
4-1. Принцип действия первого варианта осуществления изобретения
На фиг.5 приведена схема последовательности сигналов, иллюстрирующая метод синхронизации момента времени передачи данных МВМУ посредством узла В в зависимости от величины измерения наблюдаемой разности моментов времени НСК-НСК ТА от ТА в соответствии с вариантом осуществления настоящего изобретения.
Как показано на фиг.5, КРС посылает запрос на измерение ОПК на конкретный ТА посредством использования сообщения УРЛ управления измерением на этапе 501. Т.е. КРС выбирает ТА, расположенный в области передачи обслуживания как конкретный ТА, который будет выполнять измерение, и затем посылает запрос на измерение ОПК на выбранный ТА, так что ТА выполняет операцию измерения. Как описано выше, КРС может выбрать конкретный ТА и запросить выбранный ТА выполнить операцию измерения. Альтернативно, когда измерение смещения МВМУ необходимо для определения момента времени передачи данных в узле В во время передачи данных МВМУ, смещение МВМУ может быть определено с использованием статистических величин разностей моментов времени НСК-НСК ТА, сообщаемых от нескольких ТА. Поэтому необязательно определять, выполнять ли передачу обслуживания на конкретном ТА. Однако, для того чтобы послать запрос на измерение на конкретный ТА, выбирается ТА, расположенный в области передачи обслуживания.
После приема сообщения УРЛ управления измерением ТА измеряет, на этапе 502, величину ОСШ ОПК и передает измеренную величину ОСШ ОПК на КРС при помощи сообщения УРЛ отчета об измерении. КРС принимает измеренную величину ОСШ ОПК от конкретного ТА и определяет на основе измеренной величины ОСШ ОПК, расположен ли конкретный ТА в области передачи обслуживания. Если он определяет, что конкретный ТА расположен в области передачи обслуживания, КРС может выполнить на этапе 503 процедуру синхронизации узлов, чтобы получить временную информацию узла В, связанного с передачей обслуживания конкретного ТА. Процедура синхронизации узлов может быть выполнена на одном этапе или самостоятельно выполнена независимо от определения смещения МВМУ для определения момента времени передачи данных МВМУ в узле В. Т.е. процесс синхронизации узлов может быть выполнен перед процессом измерения для определения смещения МВМУ. КРС может получить временную информацию узла В при помощи процедуры синхронизации узлов с точностью примерно 0,125 мс.
В процедуре синхронизации узлов КРС передает свою собственную временную информацию и НКК(Т1) на соответствующий узел В при помощи сообщения синхронизации узлов НЛ. Соответствующий узел В включает в себя процесс передачи на КРС сообщения синхронизации узлов ВЛ, включающий в себя временную информацию (Т2, выраженную через НКВ), указывающую момент времени, когда поступило сообщение синхронизации узлов НЛ, и временную информацию (Т3), указывающую момент времени, когда передается сообщение синхронизации узлов ВЛ.
На этапе 504 КРС передает набор сообщений УРЛ управления измерением для запроса измерения разности НСК на ТА, расположенный в области передачи обслуживания. После приема сообщения УРЛ управления измерением ТА измеряет наблюдаемую разность моментов времени НСК-НСК ТА и затем передает на этапе 505 измеренную наблюдаемую разность моментов времени НСК-НСК ТА на КРС при помощи сообщения отчета об измерении. КРС затем вычисляет величину смещения момента времени передачи данных МВМУ между связанными узлами В посредством использования наблюдаемой разности моментов времени НСК-НСК ТА от ТА и наблюдаемой разности моментов времени НСК-НСК, измеренной в процессе синхронизации узлов. Как было описано выше, для опорной соты (или узла В), кадр передачи данных или момент времени передачи данных которой наиболее отстает, разность между НСК, измеренными для соответствующих узлов В посредством ТА, и НСК опорной соты устанавливается в качестве величины смещения МВМУ соответствующей соты.
На этапе 507 КРС передает вычисленную величину смещения МВМУ на соответствующий узел В посредством использования сообщения ПЧУВ, например, сообщения запроса на установку радиолинии. После приема величины смещения МВМУ от КРС узел В готовится к определению момента времени передачи мультимедийных данных в соответствии с принятой величиной смещения МВМУ и передает на этапе 508 ответное сообщение на установку радиолинии на КРС в ответ на сообщение запроса на установку радиолинии.
На этапе 509 КРС информирует ТА об определенной величине смещения МВМУ посредством использования сообщения на установку однонаправленного радиоканала передачи данных или сообщения УРЛ на установку однонаправленного радиоканала передачи данных. ТА в нормальном режиме принимает величину смещения МВМУ от КРС и передает на этапе 510 сообщение о завершении установки однонаправленного радиоканала передачи данных на КРС, после завершения установки или возврата в исходное состояние для соответствующего однонаправленного радиоканала передачи данных для многоадресной или вещательной передачи. Если синхронизация момента времени передачи из-за мягкой передачи обслуживания совершается на узле В и ТА, основываясь на величине смещения МВМУ, на этапе 511 процедура синхронизации абонентской плоскости выполняется между КРС и узлом В. Процедура синхронизации абонентской плоскости выполняется с использованием сообщения синхронизации НЛ, включающего в себя НКС для конкретного кадра данных, и сообщения синхронизации ВЛ, включающего в себя ВП для указания разности между моментом времени, когда кадр данных передачи поступил на узел В, и ВМООП и НКС, включенный в принятый кадр данных. Такая процедура синхронизации абонентской плоскости выполняется для синхронизации моментов времени передачи кадра данных. Наконец, КРС, после приема ответного сообщения на установку радиолинии от узла В и сообщения о завершении установки однонаправленного радиоканала передачи данных от ТА, начинает передавать мультимедийные потоковые данные МВМУ по однонаправленному радиоканалу передачи данных для многоадресной или вещательной передачи после завершения синхронизации абонентской плоскости.
На фиг.6-8 представлены блок-схемы, иллюстрирующие принцип действия узла В, КРС и ТА соответственно согласно варианту выполнения настоящего изобретения соответственно.
Сначала будет описан принцип действия узла В со ссылкой на фиг.6. На этапе 601 узел В определяет, принято ли сообщение запроса на установку радиолинии от КРС. Если принято сообщение запроса на установку радиолинии, то на этапе 602 узел В принимает сообщение синхронизации узлов НЛ от КРС и затем выполняет последовательные операции для процедуры синхронизации узлов, чтобы информировать КРС об его временной информации посредством использования сообщения синхронизации узлов ВЛ. На этапе 603 узел В выделяет величину смещения МВМУ из принимаемого сообщения запроса на установку радиолинии и применяет выделенную величину смещения МВМУ для процесса установки момента времени передачи узла В для соответствующей мультимедийной потоковой передачи. После завершения процесса реконфигурации радиолинии для услуги МВМУ в соответствии с принятой величиной смещения МВМУ, узел В конфигурирует сообщение запроса на установку радиолинии для передачи информации на этапе 604. После этого на этапе 605 узел В передает сконфигурированное сообщение запроса на установку радиолинии на КРС, тем самым информируя КРС о завершении процесса установки момента времени передачи узла В для соответствующей мультимедийной потоковой передачи. Наконец, на этапе 606 узел В передает сообщение синхронизации ВЛ, включающее ВП и принятую информацию НКС, на КРС для синхронизации кадров между КРС и узлом В. Тем временем узел В выполняет процедуру синхронизации абонентской плоскости и затем передает данные МВМУ, принятые от КРС в момент времени, определенный в соответствии с величиной смещения МВМУ, определенной посредством КРС.
Ниже описывается принцип действия КРС со ссылкой на фиг.7. На этапе 701 КРС передает сообщение УРЛ управления измерением на ТА. Сообщение УРЛ управления измерением представляет собой набор сообщений, позволяющий соответствующему ТА измерить величину ОСШ ОПК. На этапе 702 КРС принимает сообщение УРЛ отчета об измерении, включающее величину ОСШ ОПК, измеренную ТА. На этапе 703 КРС определяет из принятой величины ОСШ ОПК, расположен ли ТА, который передал сообщение УРЛ отчета об измерении, в области передачи обслуживания. Если необходима передача обслуживания для ТА, то на этапе 704 КРС передает сообщение синхронизации узлов НЛ на узел В для получения временной информации узла В, связанного с передачей обслуживания. Далее КРС выполняет процедуру синхронизации узлов посредством приема сообщения синхронизации узлов ВЛ с временной информацией от узла В. Кроме того, на этапе 705 КРС передает сообщение управления измерением на ТА, расположенный в области передачи обслуживания, так что ТА измеряет наблюдаемую разность моментов времени НСК-НСК. На этапе 706 КРС принимает сообщение отчета об измерении, включающее в себя наблюдаемую разность моментов времени НСК-НСК, измеренную ТА. На этапе 707 КРС определяет величину смещения МВМУ каждой соты посредством использования принятой наблюдаемой разности моментов времени НСК-НСК и наблюдаемой разности моментов времени НСК-НСК, измеренной в процессе синхронизации узлов. На этапе 708 КРС передает вычисленную величину смещения МВМУ на соответствующий узел В, используя сообщение ПЧУВ запроса на установку радиолинии. Узел В определяет момент времени передачи потокового мультимедиа МВМУ с использованием величины смещения МВМУ от КРС. Если определен момент времени передачи данных МВМУ, то узел В передает сообщение запроса на установку радиолинии на КРС. На этапе 709 КРС принимает сообщение запроса на установку радиолинии, передаваемое от узла В. На этапе 710 КРС передает величину смещения МВМУ на соответствующий ТА вместе с сообщением УРЛ о реконфигурации однонаправленного радиоканала передачи данных. После приема величины смещения МВМУ ТА готовится к приему МВМУ. Если подготовка для приема МВМУ завершена, то ТА информирует КРС о завершении подготовки для приема МВМУ посредством использования сообщения о завершении установки однонаправленного радиоканала передачи данных. На этапе 711 КРС принимает от ТА сообщение о завершении установки однонаправленного радиоканала передачи данных в качестве сообщения о завершении установки или возврата в исходное состояние для соответствующего однонаправленного радиоканала передачи данных. Наконец, на этапе 712 КРС передает сообщение синхронизации НЛ с НКС на узел В для кадровой синхронизации с узлом В. Кроме того, КРС принимает от узла В сообщение синхронизации ВЛ, включающее в себя информацию о ВП и принятом НКС. КРС может выполнить синхронизацию абонентской плоскости при помощи ВП из принятого сообщения синхронизации ВЛ. После выполнения синхронизации абонентской плоскости КРС передает данные МВМУ в момент времени передачи, определенный в соответствии с величиной смещения МВМУ.
Ниже будет описан принцип действия ТА со ссылкой на фиг.8. На этапе 801 ТА принимает сообщение управления измерением от соответствующего КРС. Если принимается сообщение управления измерением, то на этапе 802 ТА измеряет величину ОСШ ОПК в соответствии с совокупностью информации в сообщении управления измерением и затем передает измеренную величину ОСШ ОПК на соответствующий КРС посредством использования сообщения УРЛ отчета об измерении. Если КРС определяет из величины ОСШ ОПК, что ТА расположен в области передачи обслуживания, то ТА принимает от КРС сообщение УРЛ управления измерением для запроса измерения наблюдаемой разности моментов времени НСК-НСК на этапе 803. ТА измеряет наблюдаемую разность моментов времени НСК-НСК в ответ на сообщение УРЛ управления измерением и затем информирует на этапе 804 КРС об измеренной наблюдаемой разности моментов времени НСК-НСК посредством использования сообщения УРЛ отчета об измерении. КРС затем определяет величину смещения МВМУ из наблюдаемой разности моментов времени НСК-НСК от ТА и передает определенную величину смещения МВМУ на ТА вместе с сообщением о реконфигурации радиолинии. На этапе 805 ТА принимает сообщение на установку однонаправленного радиоканала передачи данных с величиной смещения МВМУ. Если величина смещения МВМУ, передаваемая КРС, принимается нормально, то на этапе 806 ТА информирует КРС о нормальном приеме величины смещения МВМУ посредством использования сообщения о завершении установки однонаправленного радиоканала передачи данных, тем самым завершая подготовку для приема услуги МВМУ. После этого ТА управляет моментом времени начала приема кадра данных для потоковых данных, передаваемых от узла В, посредством использования принятой величины смещения МВМУ, тем самым минимизируя потери принятых данных и позволяя производить мягкое объединение.
4-2. Принцип действия согласно второму варианту осуществления изобретения
В настоящем изобретении также предусмотрен способ синхронизации момента времени передачи потоковых данных МВМУ в узле В посредством использования наблюдаемой разности моментов времени НСК-НСК, вычисленной процессом синхронизации узлов, и наблюдаемой разности моментов времени НСК-НСК, измеренной узлом В. Метод синхронизации моментов времени передачи узла В относится к способу использования наблюдаемой разности моментов времени НСК-НСК, измеренной узлом В, вместо наблюдаемой разности моментов времени НСК-НСК, измеренной ТА, и краткое описание которого приведено ниже.
Во втором варианте осуществления настоящего изобретения КРС выполняет процесс синхронизации узлов с целью получения временной информации для нескольких узлов В. В результате этого процесса КРС может получить временную информацию узла В с точностью примерно 0,125 мс. После этого КРС передает наблюдаемую разность моментов времени НСК-НСК, измеренную каждым узлом В, используя сообщение ПЧУВ запроса на запуск измерения. КРС вычисляет величину смещения МВМУ для всех узлов В в многоадресной группе, основанной на наблюдаемой разности моментов времени НСК-НСК, измеряемой и передаваемой узлами В, и наблюдаемой разности моментов времени НСК-НСК, вычисленной в процессе синхронизации узлов. КРС вычисляет основанную на чипе величину смещения МВМУ для каждого узла В в зависимости от принятых величин наблюдаемой разности моментов времени НСК-НСК следующим образом.
Вначале узел В, кадр передачи данных или момент времени передачи которого наиболее отстает, устанавливается как опорный узел В. После этого КРС вычисляет разность между наблюдаемой разностью моментов времени НСК-НСК, измеренной опорным узлом В, и наблюдаемой разностью моментов времени НСК-НСК, измеренной каждым узлом В, и определяет среднюю величину разности в качестве величины смещения МВМУ для соответствующего узла В. Причина выбора способа задержки момента времени передачи индивидуального узла В, основанного на опорном узле В, момент времени передачи данных которого наиболее отстает, заключается в уменьшении потерь данных, которые могут произойти, если момент времени передачи данных продвигается вперед. После этого КРС выполняет процесс синхронизации абонентской плоскости на каждой соте посредством использования кадрового протокола и затем передает потоковые данные МВМУ в соответствии с величиной смещения МВМУ для индивидуальной соты, определенной на предыдущем этапе.
Второй вариант выполнения позволяет осуществлять не только синхронизацию между узлами В, связанными с передачей обслуживания конкретного ТА, но также синхронизацию всех узлов В, включенных в многоадресную область в пределах одного узла В. На фиг.9 представлена схема последовательности сигналов, иллюстрирующая метод синхронизации момента времени передачи узла В, основанный на величине измерения наблюдаемой разности моментов времени НСК-НСК узла В от узла В в соответствии с другим вариантом осуществления настоящего изобретения. Как показано на фиг.9, КРС выполняет на этапе 901 процедуру синхронизации узлов с целью получения временной информации узла В, связанного с передачей обслуживания. КРС может получить временную информацию соответствующего узла В посредством процедуры синхронизации узлов с точностью примерно 0,125 мс. В ходе процедуры синхронизации узлов КРС передает свою собственную временную информацию и НКК(Т1) на соответствующий узел В вместе с сообщением синхронизации узлов НЛ. Узел В включает в себя процесс передачи на КРС сообщения синхронизации узлов ВЛ, включающий в себя временную информацию (Т2, выраженная через НКВ), указывающую момент времени, когда поступило сообщение синхронизации узлов НЛ, и временную информацию (Т3), указывающую момент времени, когда передается сообщение синхронизации узлов ВЛ. Если завершена процедура синхронизации узлов, КРС выдает команду на все узлы В на измерение наблюдаемой разности моментов времени НСК-НСК посредством передачи сообщения ПЧУВ общего запроса на запуск измерения на этапе 902. После приема сообщения ПЧУВ общего запроса на запуск измерения от КРС, каждый узел В измеряет наблюдаемую разность моментов времени НСК-НСК. Если завершено измерение наблюдаемой разности моментов времени НСК-НСК, узел В передает измеренную наблюдаемую разность моментов времени НСК-НСК на КРС. На этапе 903 КРС принимает общее ответное сообщение на запуск измерения, включающий наблюдаемые разности моментов времени НСК-НСК, измеренные всеми узлами В. КРС вычисляет смещение МВМУ для каждого узла В, основанное на принятом общем ответном сообщении на запуск измерения. Т.е. на этапе 904 КРС вычисляет величину смещения МВМУ для каждого узла В, основанную на наблюдаемой разности моментов времени НСК-НСК, вычисленной процессом синхронизации узлов, и наблюдаемой разности моментов времени НСК-НСК, измеряемой и передаваемой узлом В.
На этапе 905 КРС передает вычисленную величину смещения МВМУ на соответствующий узел В, используя сообщение ПЧУВ, например сообщение запроса на установку радиолинии. Как было показано выше, КРС может передавать информацию о величине смещения МВМУ среди нескольких узлов В на все из нескольких сот. Т.е. так как даже сота, где данные МВМУ не передаются в настоящее время, может определить момент времени передачи данных МВМУ, зависящий от величины смещения МВМУ, КРС может передать предварительно определенное смещение МВМУ на несколько сот. Конечно, способ передачи смещения МВМУ от КРС на узел В или ТА может быть изменен в смысле сообщения ПЧУВ и сообщения УРЛ. Кроме того, смещение МВМУ может быть передано либо последовательно, либо одновременно на узел В и ТА.
Узел В, после приема величины смещения МВМУ от КРС, определяет момент времени передачи мультимедийных данных в соответствии с принятой величиной смещения МВМУ. Если определена передача данных МВМУ, то на этапе 906 узел В передает ответное сообщение на установку радиолинии на КРС. На этапе 907 КРС информирует ТА об определенной величине смещения МВМУ посредством использования сообщения на установку однонаправленного радиоканала передачи данных или сообщения УРЛ на установку однонаправленного радиоканала передачи данных. Если величина смещения МВМУ принята нормально, то ТА выполняет установку или возврат в исходное состояние момента времени передачи на соответствующем однонаправленном радиоканале передачи данных для многоадресной или вещательной передачи. Если завершена установка или возврат в исходное состояние момента времени передачи, то ТА передает сообщение о завершении установки однонаправленного радиоканала передачи данных на КРС на этапе 908. На этапе 909 КРС выполняет процедуру синхронизации абонентской плоскости с узлом В. В процедуре синхронизации абонентской плоскости сообщение синхронизации НЛ, включающее в себя НКС для конкретного кадра данных, и сообщение синхронизации ВЛ, включающее ВП, указывающее разность между моментом времени, когда поступил кадр данных передачи на узел В, и ВНОП, и НКС, включенный в принятый кадр данных, используются между КРС и узлом В. Такая процедура синхронизации абонентской плоскости выполняется для синхронизации моментов времени передачи кадров данных. Наконец, КРС, после приема сообщения ответа на установку радиолинии от узла В и сообщения о завершении установки однонаправленного радиоканала передачи данных от ТА, начинает передачу мультимедийных потоковых данных МВМУ по однонаправленному радиоканалу передачи данных для многоадресной или вещательной передачи.
На фиг.10-12 представлены блок-схемы, иллюстрирующие принцип действия узла В, КРС и ТА соответственно согласно другому варианту осуществления настоящего изобретения соответственно.
Вначале будет описан принцип действия узла В со ссылкой на фиг.10. На этапе 1001 узел В выполняет процедуру синхронизации узлов с КРС. Если процедура синхронизации узлов завершена, то на этапе 1002 узел В принимает сообщение общего запроса на запуск измерения от КРС. Принятым сообщением общего запроса на запуск измерения является набор сообщений для измерения наблюдаемой разности моментов времени НСК-НСК между узлами В. Узел В измеряет наблюдаемую разность моментов времени НСК-НСК между соседними узлами В и передает измеренную наблюдаемую разность моментов времени НСК-НСК на КРС вместе с общим ответным сообщением на запуск измерения на этапе 1003. На этапе 1004 узел В определяет, принято ли сообщение запроса на установку радиолинии от КРС. Если на этапе 1004 определяется, что принято сообщение запроса на установку радиолинии, то на этапе 1005 узел В выделяет величину смещения МВМУ, определенную посредством КРС из принятого сообщения запроса на установку радиолинии, и затем применяет выделенную величину смещения МВМУ в процессе определения момента времени передачи узла В для соответствующего мультимедийного потока данных. Узел В конфигурирует на этапе 1006 сообщение ответа на установку радиолинии и затем передает сконфигурированное ответное сообщение на установку радиолинии на КРС на этапе 1007, тем самым информируя КРС о завершении процесса определения момента времени передачи узла В для соответствующего мультимедийного потока данных. Ниже описывается принцип действия КРС со ссылкой на фиг.11. На этапе 1101 КРС выполняет процедуру синхронизации узлов с предварительно определенными узлами В. На этапе 1102 КРС передает сообщение ПЧУВ общего запроса на запуск измерения на узлы В. Переданным сообщением ПЧУВ является набор сообщений для запроса на измерение узлом В, принимающим соответствующее сообщение, наблюдаемой разности моментов времени НСК-НСК между его соседними узлами В. Узлы В, после приема сообщения ПЧУВ общего запроса на запуск измерения, измеряют наблюдаемую разность моментов времени НСК-НСК и затем передают измеренную наблюдаемую разность моментов времени НСК-НСК на КРС при помощи общего ответного сообщения на запуск измерения. На этапе 1103 КРС принимает наблюдаемую разность моментов времени НСК-НСК, измеренную узлом В, при помощи общего ответного сообщения на запуск измерения. На этапе 1104 КРС определяет величину смещения МВМУ, зависящую от принятой величины измерения наблюдаемой разности моментов времени НСК-НСК. На этапе 1105 КРС передает определенную величину смещения МВМУ на узел В посредством использования сообщения ПЧУВ, такого как сообщение запроса на установку радиолинии. Узел В затем устанавливает или возвращает в исходное состояние односторонний радиоканал передачи данных мультимедиа в соответствии с принятой величиной смещения МВМУ. Если установка или возврат в исходное состояние завершены, то узел В передает ответное сообщение на установку радиолинии на КРС, и КРС принимает ответное сообщение на установку радиолинии на этапе 1106. КРС передает величину смещения МВМУ на ТА при помощи сообщения УРЛ на установку одностороннего радиоканала передачи данных на этапе 1107 и принимает сообщение о завершении установки или возврата в исходное состояние для соответствующего одностороннего радиоканала передачи данных для МВМУ на этапе 1108.
Далее будет описан принцип действия ТА со ссылкой на фиг.12. На этапе 1201 ТА принимает величину смещения МВМУ, определенную посредством КРС при помощи сообщения на установку одностороннего радиоканала передачи данных. После установки или возврата в исходное состояние одностороннего радиоканала передачи данных в соответствии с принятой величиной смещения МВМУ, на этапе 1202 ТА информирует КРС о завершении установки или возврата в исходное состояние соответствующего одностороннего радиоканала передачи данных при помощи использования сообщения о завершении установки одностороннего радиоканала передачи данных, тем самым завершая подготовку для приема услуги МВМУ.
4-3. Другие примеры первого варианта осуществления изобретения
В настоящем изобретении способ синхронизации момента времени передачи данных МВМУ узла В использует наблюдаемую интерференцию моментов времени НСК-НСК, вычисленную в чипах при помощи ТА, расположенного в области передачи обслуживания, посредством выделения НСК из ОПК, передаваемого от каждого узла В. Определяется, что ТА входит в область передачи обслуживания, если существует две или несколько радиолиний, имеющих величину ОСШ ОПК более высокую, чем предварительно определенная величина (см. 3GPP specification TS25.101 chap 8.7.1, 8.7.2), посредством использования набора сообщений УРЛ управления измерением для измерения отдельной величины ОСШ ОПК. КРС передает набор сообщений УРЛ управления измерением для запроса измерения разности НСК на ТА, расположенный в области передачи обслуживания, тем самым принимая величину измерения наблюдаемой разности моментов времени НСК-НСК между связанными сотами при помощи сообщения УРЛ запроса измерения. КРС определяет величину смещения МВМУ индивидуальной соты, зависящей от принимаемой величины измерения наблюдаемой разности моментов времени НСК-НСК ТА в соответствии с вышеописанными формулами. КРС передает определенную величину коррекции НСК на соответствующий ТА, используя сообщение УРЛ. После этого КРС выполняет процесс синхронизации абонентской плоскости на индивидуальной соте посредством использования кадрового протокола, и затем передает потоковые данные МВМУ в соответствии с величиной коррекции НСК индивидуальной соты, определенной на предыдущем этапе. ТА, который будет измерять наблюдаемую разность моментов времени НСК-НСК ТА, может быть определен, основываясь на измерении ОПК, сообщаемым узлом В, как указано выше. Количество определенных ТА может быть равно одному или более. Статистически вычисляется наблюдаемая разность моментов времени НСК-НСК ТА, принимаемая от определенного ТА, и она может быть использована для определения наблюдаемой разности моментов времени НСК-НСК ТА, подлежащей использованию для синхронизации моментов времени передачи узла В. Кроме того, даже когда смещение МВМУ определяется посредством статистически вычисляемых наблюдаемых разностей моментов времени НСК-НСК, принимаемых от нескольких ТА, определенное смещение МВМУ вычисляется для нескольких сот и затем передается на несколько сот.
Например, предполагается, что, когда число определенных ТА равно N, то наблюдаемая разность моментов времени НСК-НСК ТА, принимаемая от каждого ТА, определяется как наблюдаемая разность(i) моментов времени НСК-НСК ТА. Далее предполагается, что параметр i имеет величину от 1 до N и наблюдаемая разность(i) моментов времени НСК-НСК ТА представляет величину измерения наблюдаемой разности моментов времени НСК-НСК ТА, принимаемой от iого ТА. В этом случае статистически определяемая величина наблюдаемой разности моментов времени НСК-НСК ТА может быть определена
уравнением (22):
наблюдаемая разность моментов времени НСК-НСК ТА = 1/N х [наблюдаемая разность(1) моментов времени НСК-НСК ТА + наблюдаемая разность(2) моментов времени НСК-НСК ТА + ... + наблюдаемая разность(N) моментов времени НСК-НСК ТА].
В качестве еще одного способа, КРС хранит статистическую информацию о наблюдаемых разностях моментов времени НСК-НСК ТА, передаваемых от ТА, которые выполняют передачу обслуживания между двумя сотами, используя выделенные каналы, и затем передает данные МВМУ, используя статистические величины, хранимые в нем, без дополнительного измерения посредством ТА.
КРС постоянно хранит информацию о наблюдаемых разностях моментов времени НСК-НСК ТА, передаваемых в момент, когда один ТА выполняет передачу обслуживания между сотой №1 и сотой №2. Конкретно, при передаче обслуживания одного ТА между сотой №1 и сотой №2, ТА измеряет наблюдаемую разность моментов времени НСК-НСК ТА или наблюдаемую разность моментов времени НКС-НСК ТА и затем передает величину измерения на КРС. Наблюдаемая разность моментов времени НКС-НСК ТА представляет собой НКС разности данных, переданных от соты (например соты №1), с которой в настоящее время установлена радиолиния, и НСК соты №2, с которой должна быть добавлена радиолиния, и НСК соты №1 и НСК соты №2 могут быть получены посредством использования НКС и НСК соты №1. Поэтому наблюдаемая разность моментов времени НКС-НСК ТА может быть проанализирована как информация о наблюдаемой разности моментов времени НСК-НСК ТА. Если информация о наблюдаемой разности моментов времени НСК-НСК ТА принимается от одного ТА, то КРС может модифицировать информацию о существующей наблюдаемой разности моментов времени НСК-НСК ТА, как определяется
уравнением (23):
наблюдаемая разность(статистическая 0) моментов времени НСК-НСК ТА = t х (наблюдаемая разность(статистическая 1) моментов времени НСК-НСК ТА) + (1-t) х (наблюдаемая разность(новая) моментов времени НСК-НСК ТА).
В уравнении (23) "t" имеет величину от 0 до 1 и может быть определена КРС. Наблюдаемая разность(новая) моментов времени НСК-НСК ТА представляет собой принимаемую наблюдаемую разность моментов времени НСК-НСК ТА, и наблюдаемая разность(статистическая 1) моментов времени НСК-НСК ТА представляет собой ранее хранимую наблюдаемую разность моментов времени НСК-НСК ТА. В результате КРС может получить наблюдаемую разность(статистический 0) моментов времени НСК-НСК ТА, и узел В хранит наблюдаемую разность(статистический 0) моментов времени НСК-НСК ТА как наблюдаемую разность моментов времени НСК-НСК ТА. Хранимая наблюдаемая разность моментов времени НСК-НСК ТА может быть использована как величина наблюдаемой разности моментов времени НСК-НСК ТА в процессе синхронизации узлов для услуги МВМУ.
5. Передатчик узла В
На фиг.13 изображена конструкция передатчика узла В в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг.13, в узле В приемник 1301 пакетов данных МВМУ принимает пакеты данных МВМУ от КРС. Если НКС пакета данных МВМУ равен НКС=k, то НСК кадра ПОФКУ, где начинается передача пакета данных МВМУ, равен НСК=k+OFF, и время задержки между моментом времени начала кадра МВМУ и моментом времени начала кадра ПОФКУ должно быть равно Tm. В этом случае OFF и Tm вычисляются при помощи вычислителя 1303 кадровой задержки и чиповой задержки, основываясь на информации о смещении МВМУ в соответствии с уравнением (24) и уравнением (25) ниже.
Уравнение (24):

Уравнение (25):
Tm = смещение МВМУ - OFF х 38400
В уравнении (24)  означает максимальное целое число меньшее или равное конкретной величине "x".
означает максимальное целое число меньшее или равное конкретной величине "x".
Вычислитель 1303 кадровой задержки и чиповой задержки применяет основанное на кадре время задержки пакета данных МВМУ к основанной на кадре задержке 1305, и основанное на чипе время задержки пакета данных МВМУ - к основанной на чипе задержке 1329. Основанное на кадре время задержки, примененное к основанной на кадре задержке 1305, устанавливается таким, что передача кадра МВМУ может начинаться при НСК=k=OFF, тогда как основанное на чипе время задержки, примененное к основанной на чипе задержке 1329, устанавливается таким, что передача кадра МВМУ может начинаться через Tm-чиповое время после момента времени начала ПОФКУ с НСК=k+OFF.
Пакет данных МВМУ, принимаемый от КРС, подается на канальный кодер 1307 при помощи основанной на кадре задержки 1305 по истечении вычисленного основанного на кадре времени задержки. Выход канального кодера 1307 обрабатывается согласователем 1309 скорости и перемежителем 1311, а потом разделяется на синфазный (I) поток битов и квадратурный фазовый (Q) поток битов посредством последовательно-параллельного (S/P) преобразователя 1315 для образования комплексного потока символов. Сигналы I- и Q-потоков битов умножаются расширителем 1317 на ортогональный код с переменным коэффициентом расширения (ОПКР) CОПКР с чиповой скоростью для расширения. С выхода расширителя 1317 сигнал Q-потока битов умножается умножителем 1321 на j и преобразуется в мнимый сигнал, и выход умножителя 1321 добавляется к сигналу I-потока битов посредством сумматора 1319, образуя комплексный сигнал с чиповой скоростью. Комплексный выходной сигнал сумматора 1319 умножается на скремблирующий код Сскрембл в скремблере 1331 по истечении основанного на чипе времени задержки, вычисляемого основанной на чипе задержкой 1329, основанной на ПОФКУ. Выходной сигнал скремблера 1331 умножается на коэффициент усиления канала посредством умножителя 1333 и затем модулируется модулятором 1335. Выходной сигнал модулятора 1335 преобразуется в радиочастотный (РЧ) сигнал процессором 1337 РЧ и затем передается антенной 1339.
В процедуре синхронизации абонентской плоскости величина Тпоступл, означающая время поступления сообщения синхронизации НЛ, принимаемого приемником 1301 пакетов данных МВМУ, подается на вычислитель 1323 ВП. Кроме того, НКС, включенный в сообщение синхронизации НЛ, подается на определитель 1327 LTOA_MBMS. Определитель 1327 LTOA_MBMS определяет величину LTOA_MBMS для НСК, соответствующую принятому НКС, основанному на принятой величине НКС и смещении МВМУ, принятому от КРС при помощи сообщения ПЧУВ. Величина LTOA_MBMS представляет собой максимальный момент времени, когда смещение МВМУ должно поступить, для того чтобы передать данные с НКС+смещение_МВМУ. Величина LTOA_MBMS определяется в соответствии с интервалом между посылками (ИМП), или основной единицы передачи, данных, и ИМП равно одному из значений: 10 мс, 20 мс, 40 мс и 80 мс. Т.е. когда ИМП больше, величина LTOA_MBMS должна быть больше. Величина LTOA_MBMS представляет временной интервал, в течение которого должны предварительно поступить данные с принятой величиной НКС, так что они могут быть переданы с соответствующим НСК(НКС+смещение_МВМУ). Таким образом, если ИМП продолжителен, то данные должны поступить предварительно, для того чтобы они были переданы через перемежитель 1311 в требуемое время. Перемежитель 1311 перемежает данные посредством ИМП. Таким образом, если ИМП больше 10 мс, например если ИМП равно 20 мс, то величина LTOA_MBMS должна быть установлена на величину, которая больше 10 мс, учитывая задержку данных перемежителем 1311 перед НСК (т.е. НКС+смещение_МВМУ), когда должен быть передан соответствующий НКС. Величина LTOA_MBMS, определенная определителем 1327 LTOA_MBMS, подается на вычислитель 1323 ВП. Вычислитель 1323 ВП определяет величину ВП, основываясь на принятой величине Тпоступл, величине LTOA_MBMS и величине ВМООП, ранее принятой при помощи сообщения ПЧУВ. Величина ВП определяется
уравнением (26):
ВП = LTOA_MBMS - ВМООП - Тпоступл.
Определенная величина ВП передается на КРС посредством передатчика 1325 ВП при помощи сообщения синхронизации ВЛ.
Как было показано выше, в асинхронной системе подвижной связи, поддерживающей услугу МВМУ, когда ТА перемещается в область, где он может принимать данные от множества узлов В, настоящее изобретение обеспечивает ТА мягкой передачей обслуживания. Следовательно, даже если абонент МВМУ перемещается из настоящей соты в новую соту, настоящее изобретение обеспечивает стабильную абонентскую услугу МВМУ. Кроме того, когда ТА расположено в области передачи обслуживания, настоящее изобретение позволяет ТА производить мягкое объединение данных, принимаемых от множества узлов В, тем самым снижая мощность передачи узлов В. В результате настоящее изобретение способствует повышению отдачи по мощности. Хотя изобретение было описано со ссылкой на некоторые предпочтительные варианты осуществления, для специалиста в этой области техники представляется понятным, что в него могут быть внесены различные изменения в пределах сущности и объема изобретения, определенного в прилагаемой формуле изобретения.
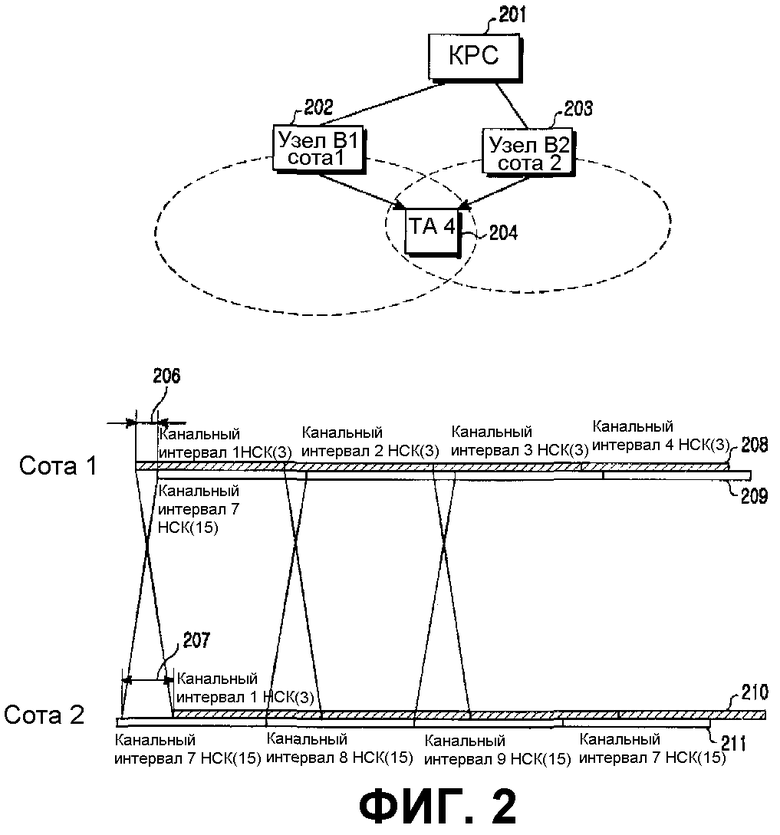

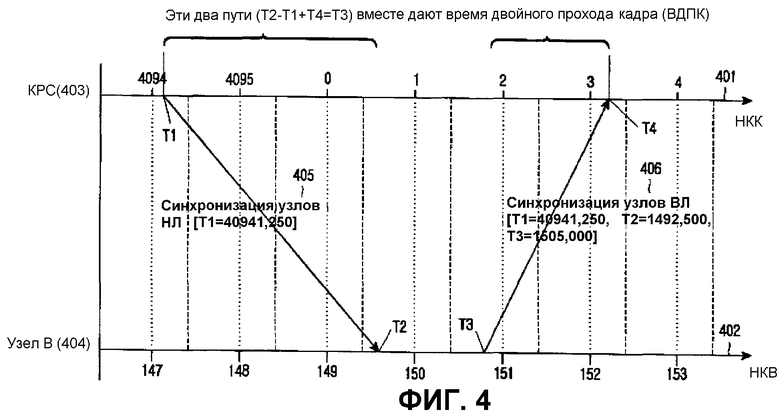
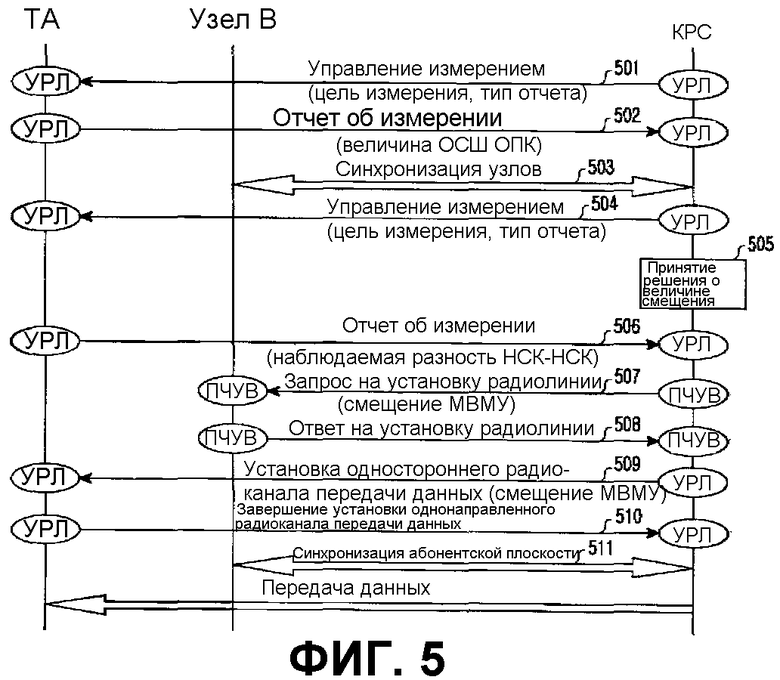
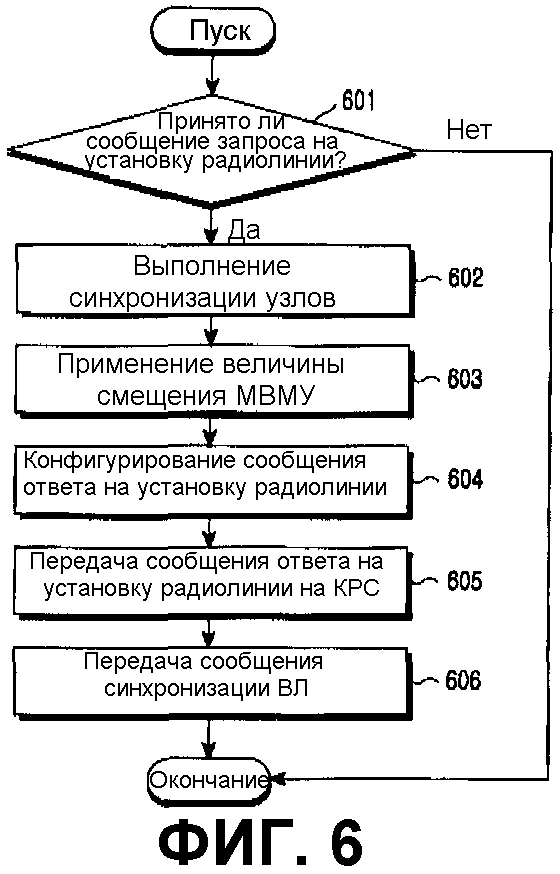

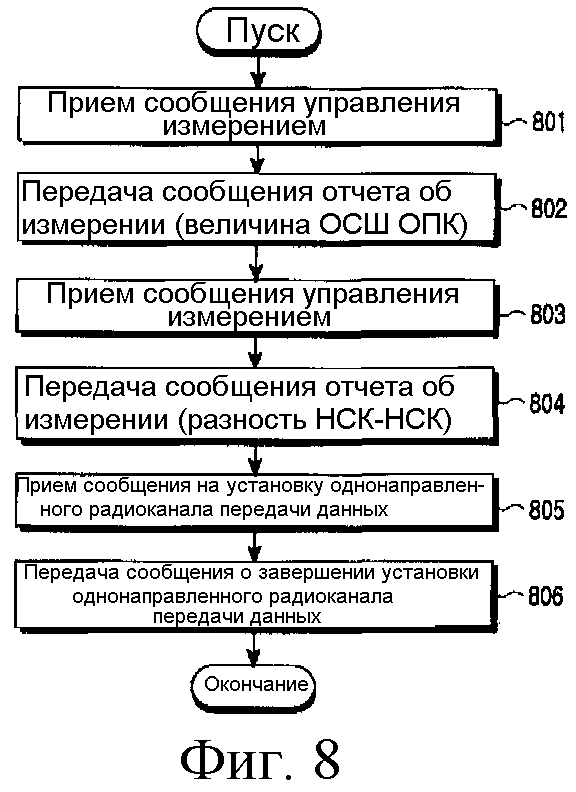
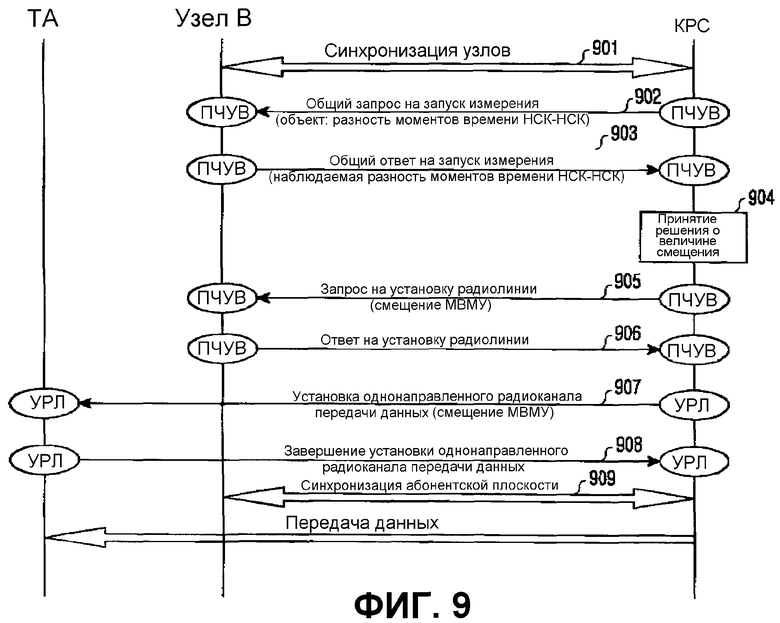
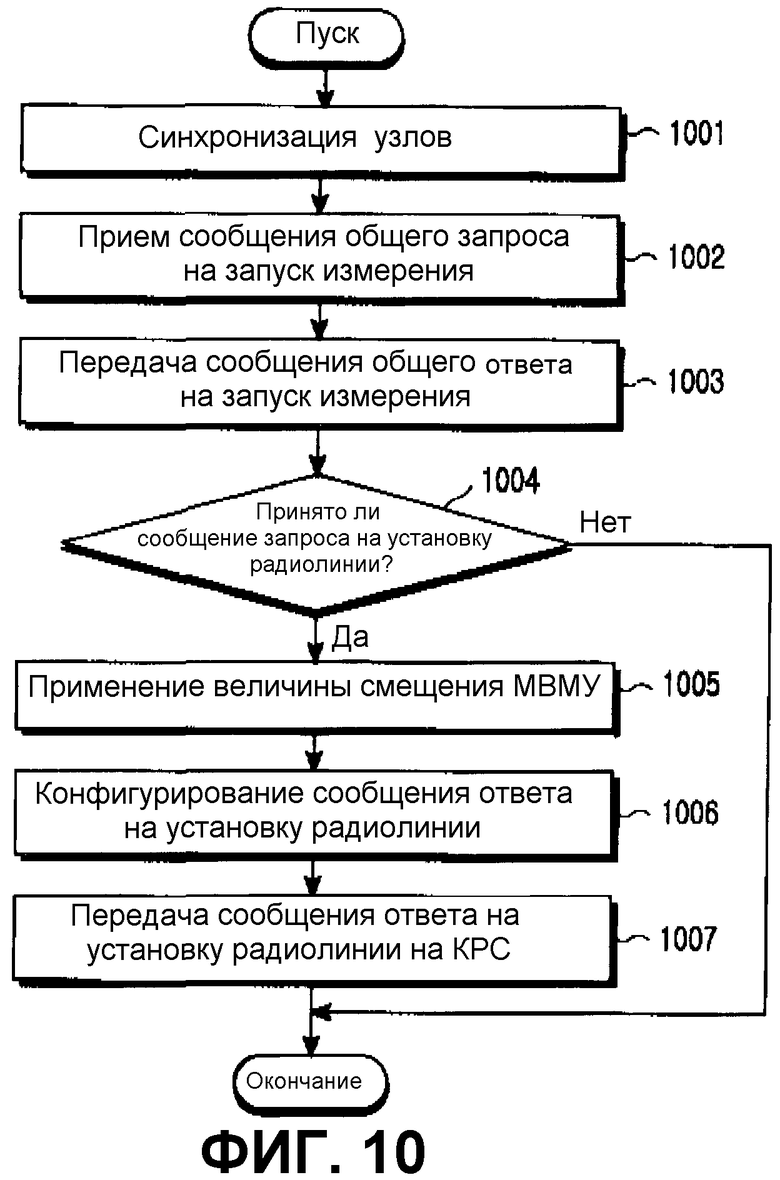
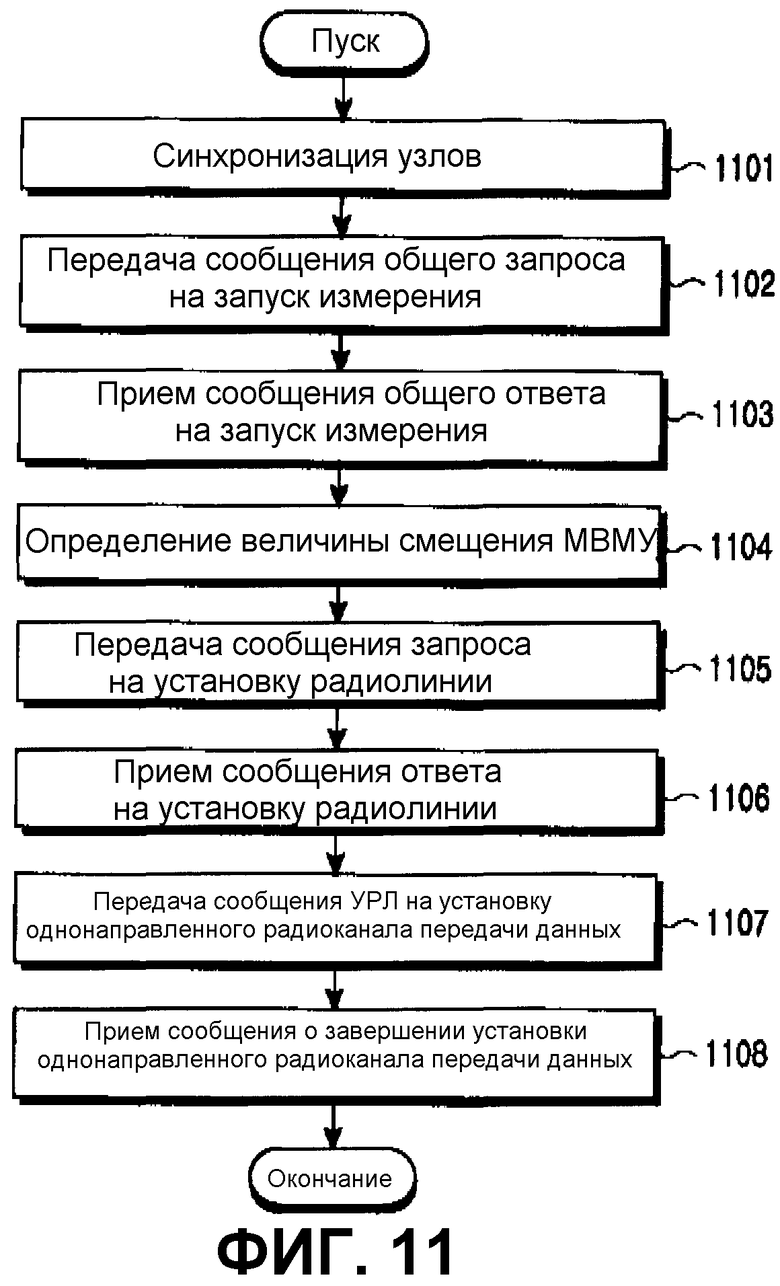

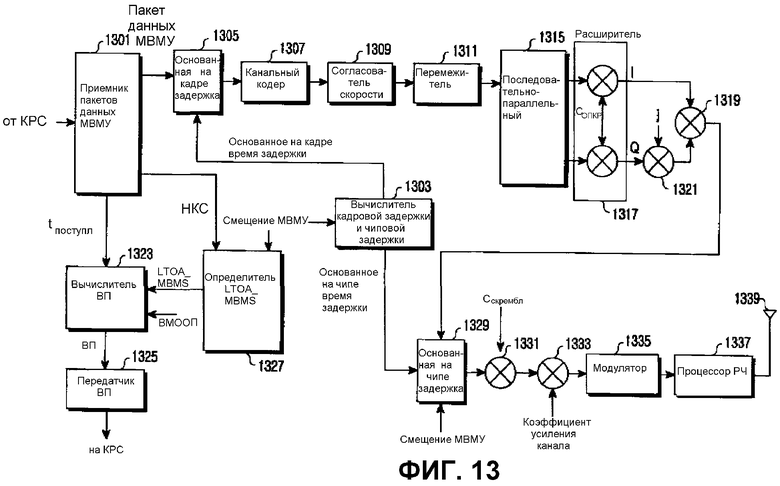
Изобретение относится к способу обеспечения мягкой передачи обслуживания в системе подвижной связи многостанционного доступа с кодовым разделением каналов, обеспечивающей многоадресную мультимедийную вещательную услугу в асинхронной системе подвижной связи (услугу МВМУ). Когда терминал абонента (ТА) перемещается в область, где он может принимать данные от множества узлов В, на ТА выполняется мягкая передача обслуживания. Технический результат заключается в том, что абонент, получающий МВМУ и перемещающийся из существующей соты в новую соту, обеспечивается стабильным сигналом МВМУ. Кроме того, ТА может осуществлять мягкое выполнение данных, принимаемых от множества узлов В. 4 н. и 23 з.п. ф-лы, 13 ил.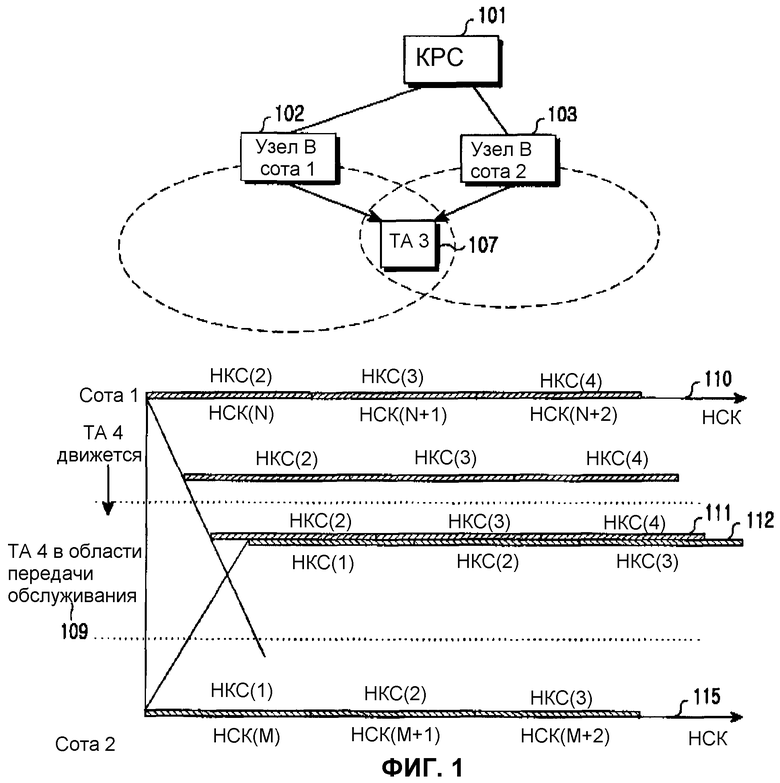
принимают посредством КРС величину первой разности между моментом времени начала передачи первого системного кадра от первого узла В из числа соседних узлов В и моментом времени начала приема второго системного кадра, соответствующего первому системному кадру, принятому от второго узла В из числа соседних узлов В, от первого узла В,
принимают посредством КРС величину второй разности между моментом времени начала передачи второго системного кадра от второго узла В и моментом времени начала приема первого системного кадра, соответствующего второму системному кадру, принятому от первого узла В, от второго узла В,
вычисляют посредством КРС величину разности между моментами времени начала передачи первого и второго системных кадров из величин первой и второй разности,
определяют посредством КРС величины первого и второго смещения, соответствующие вычисленной величине разности,
информируют посредством КРС первый узел В о величине первого смещения и
информируют посредством КРС второй узел В о величине второго смещения,
причем первый узел В передает кадр вещательных данных в соответствии с величиной первого смещения, а второй узел В передает кадр вещательных данных в соответствии с величиной второго смещения.
принимают величину разности между моментом времени начала передачи первого системного кадра от первого узла В из числа соседних узлов В и моментом времени начала передачи второго системного кадра от второго узла В из числа соседних узлов В, от ТА, расположенного в области передачи обслуживания,
умножают конкретное целое число из целых чисел от 0 до 255 на суммарное количество чипов, составляющих один номер системного кадра, суммируют результат умножения с конкретным целым числом из целых чисел от 0 до 38399 и передают результат суммирования в виде первого смещения на первый узел В,
суммируют упомянутую величину разности между моментами времени начала передачи и первое смещение и передают результат суммирования в виде второго смещения на второй узел В,
причем первый узел В определяет новый момент времени начала передачи кадров вещательных данных в соответствии с первым смещением, а второй узел В определяет новый момент времени начала передачи кадров вещательных данных в соответствии со вторым смещением одновременно с первым узлом В.
запрашивают через КРС соседние узлы В о разности моментов времени между номерами системных кадров от аналогичного узла В до соседних узлов В,
сообщают с каждого соседнего узла В на КРС разность между моментом времени начала передачи его первого системного кадра и моментом времени начала приема второго системного кадра, соответствующего первому системному кадру, принимаемому от аналогичного узла В,
определяют посредством КРС смещение момента времени передачи каждого соседнего узла В с возможностью передачи соседними узлами В кадров вещательных данных одновременно на основании величин разности, сообщаемых от соседних узлов В, с последующей передачей определенных смещений момента времени передачи на соответствующие соседние узлы В и
передают с каждого соседнего узла В кадры вещательных данных в момент времени передачи, к которому прикладывают смещение, получаемое с КРС.
запрашивают через КРС у ТА, расположенного в области передачи обслуживания, разность моментов времени между номерами системных кадров между соседними узлами В,
принимают посредством ТА системные кадры от соседних узлов В, измеряют упомянутую разность моментов времени на основании момента времени, в который системные кадры были переданы от соседних узлов В, и сообщают результат измерения на КРС,
определяют посредством КРС смещение момента времени передачи каждого соседнего узла В с возможностью передачи соседними узлами В кадров вещательных данных одновременно на основании упомянутой разности моментов времени, сообщенной ТА, с последующей передачей определенных смещений моментов времени передачи на соответствующие соседние узлы В и
передают с каждого соседнего узла В кадры вещательных данных в момент времени передачи, к которому применяют смещение, прикладываемое с КРС.
определяют первое смещение момента времени передачи для первого узла В посредством умножения конкретного целого числа из целых чисел от 0 до 255 на суммарное количество чипов, составляющих один номер системного кадра, с последующим суммированием результата умножения на конкретное целое число из чисел от 0 до 38399 и
определяют второе смещение момента времени передачи для второго узла В посредством суммирования упомянутой разности моментов времени и величины первого смещения момента времени передачи для первого узла В.
| СПОСОБ И УСТРОЙСТВО СИНХРОНИЗАЦИИ ПЕРЕДАЧИ ПАКЕТОВ В СИСТЕМАХ СВЯЗИ | 1995 |
|
RU2146420C1 |
| GB 2001230, 24.01.1979 | |||
| US 5268993, 07.12.1993 | |||
| US 5481258, 02.01.1996. | |||

