Изобретение относится к электротехнике, в частности к гибридным электрическим коммутационным аппаратам для включения и выключения нагрузки, которые содержат электромеханические контакты и полупроводниковый коммутатор. Обычно в установившемся режиме работают электромеханические контакты, а в режимах включения и выключения нагрузки работает полупроводниковый коммутатор, что позволяет при минимальных потерях в аппарате увеличить коммутационную стойкость электромеханических контактов (см. Г.В.Могилевский «Гибридные электрические аппараты низкого напряжения», М., Энергоатомиздат, 1986). Известны три типа гибридных коммутационных аппаратов постоянного тока, выполненных на основе полностью управляемого полупроводникового коммутатора - транзистора или запираемого тиристора (однооперационные тиристоры мы не будем рассматривать, так как они при постоянном токе требуют применения коммутирующих конденсаторов, что существенно увеличивает габариты и стоимость гибридных аппаратов): аппарат параллельного типа, когда электромеханические контакты подсоединяются параллельно полупроводниковому коммутатору, аппарат последовательного типа, когда электромеханические контакты соединяются последовательно с полупроводниковым коммутатором и аппарат параллельно-последовательного типа, когда одна пара электромеханических контактов соединяется параллельно с полупроводниковым коммутатором, а вторая пара электромеханических контактов соединяется последовательно с полупроводниковым коммутатором (см. «Электрические и электронные аппараты». Под ред. д.т.н. профессора Розанова Ю.К., М., Энергоатомиздат, 1998, стр.572-577). Наиболее совершенным с точки зрения коммутационной стойкости и минимальных потерь является гибридный аппарат параллельно-последовательного типа (см. «Электрические и электронные аппараты». Под ред. д.т.н. профессора Розанова Ю.К., стр.576, рис.11.16, а также патент №2214645 по заявке №2001115836/09 от 14.06.2001). Однако недостатком указанного гибридного аппарата является невысокое быстродействие как при включении, так и при выключении нагрузки по сравнению с полупроводниковым аппаратом.
Наиболее близким к предлагаемому изобретению аналогом, который выбран в качестве прототипа, является гибридный аппарат последовательного типа и способ его управления (см. «Электрические и электронные аппараты». Под ред. д.т.н. профессора Розанова Ю.К. стр.575, рис.11.15.). Одним из недостатков прототипа является то, что он имеет низкое быстродействие при включении нагрузки. Но если оперативные переключения в прототипе производить полупроводниковым коммутатором, а электромеханические контакты использовать только для обеспечения гальванической развязки между нагрузкой и силовой сетью, то быстродействие при включении можно получить такое же, как у полупроводникового аппарата. Однако и в этом случае прототип аппарата и способ его управления имеют несколько недостатков, к числу которых прежде всего относится то, что не решен вопрос быстрого и надежного обнаружения и отключения короткого замыкания нагрузки, не производится диагностика полупроводникового коммутатора перед включением электромеханического коммутатора, импульс управления аппаратом подается одновременно на электромеханический коммутатор и полупроводниковый коммутатор и не имеет оптимальной формы, а именно нет форсировки управляющего сигнала в момент начала протекания тока транзистора, тем более, что в прототипе этот момент определить весьма сложно, нет запирающего сигнала транзистора, в то время как силовые мощные транзисторы, как правило, требуют этого при выключении, не раскрыта система управления, не решен вопрос рекуперации избыточной энергии с нагрузки, например двигателя, в питающую сеть. Все отмеченные недостатки снижают быстродействие и надежность прототипа, сужают область его применения. В предлагаемом изобретении все эти недостатки устранены.
Технический результат изобретения - способа управления и устройства - заключается в том, чтобы увеличить быстродействие и надежность работы гибридного коммутационного аппарата и всей системы электроснабжения с указанным аппаратом, а также расширить его функциональные возможности и область применения.
Сущность предлагаемого способа управления гибридным коммутационным аппаратом, содержащим полупроводниковый коммутатор и последовательно соединенный с ним электромеханический коммутатор, заключается в том, что обеспечивают раздельное управление электромеханическим коммутатором, то есть формируют включающий и отключающий сигналы, и полупроводниковым коммутатором, то есть формируют открывающий, удерживающий и закрывающий сигналы, при этом обеспечивают оптимальную форму управляющего сигнала для полупроводникового коммутатора, а именно оптимальную крутизну нарастания открывающего сигнала при включении полупроводникового коммутатора, оптимальную мощность удерживающего сигнала управления для полупроводникового коммутатора в его открытом состоянии и оптимальную форму и мощность закрывающего сигнала при отключении полупроводникового коммутатора при номинальном токе, при токе перегрузки и особенно при коротком замыкании нагрузки, при этом в двух последних операциях отключают не только полупроводниковый коммутатор, но и электромеханический коммутатор.
Новым в предложенном способе управления гибридным коммутационным аппаратом (п.1 формулы) является то, что при включенном электромеханическом коммутаторе непрерывно контролируют напряжение на нагрузке и разрешают формирование удерживающего сигнала для полупроводникового коммутатора только при наличии напряжения на нагрузке, при этом исключается возможность формирования удерживающего сигнала для полупроводникового коммутатора в режиме пуска, а также прекращается формирование упомянутого удерживающего сигнала при коротком замыкании нагрузки, что обеспечивает ускоренное отключение короткозамкнутой нагрузки по сравнению с максимально-токовой защитой, так как при обычно встречающемся активно-индуктивном сопротивлении силовой сети напряжение на нагрузке при ее коротком замыкании исчезает быстрей, чем ток короткого замыкания достигнет значения тока уставки, следовательно, при этом сокращается и полное время отключения короткозамкнутой нагрузки.
По п.2 формулы перед формированием включающего сигнала для электромеханического коммутатора контролируют исправность полупроводникового коммутатора и разрешают формирование упомянутого включающего сигнала только при исправном полупроводниковом коммутаторе, при этом увеличивается надежность электроснабжения нагрузки, так как исключается подача напряжения на нагрузку при неисправном полупроводниковом коммутаторе.
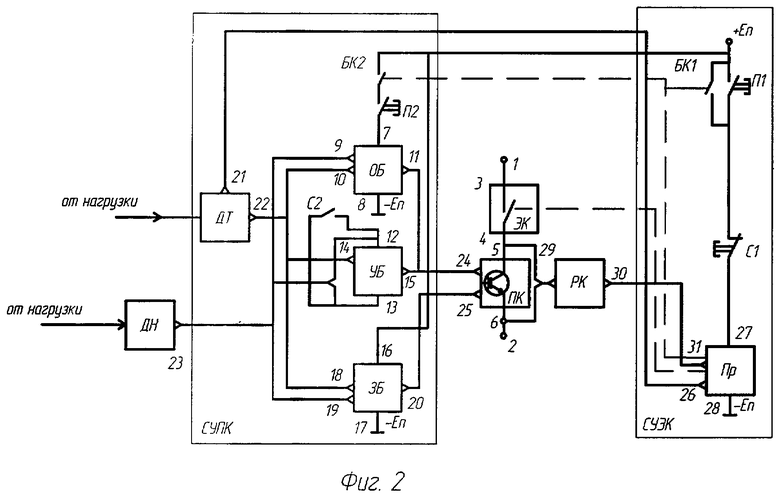
Предложенное устройство (фиг.1) содержит электромеханический коммутатор ЭК с приводом ПР и системой управления СУЭК, в которую могут входить первые пусковая П1 и остановочная С1 кнопки и первые замыкающие блок-контакты БК1, полупроводниковый коммутатор ПК с системой управления СУПК, в которую входят открывающий ОБ, удерживающий УБ и закрывающий ЗБ блоки и датчик ДТ тока нагрузки, а также могут входить вторая пусковая кнопка П2, второй остановочный ключ С2, вторые замыкающие блок-контакты БК2, при этом электромеханический ЭК и полупроводниковый ПК коммутаторы соединены последовательно между собой, электромеханический коммутатор управляется посредством кнопок П1 и С1, полупроводниковый коммутатор управляется посредством кнопки П2 и ключа С2, а датчик ДТ тока нагрузки выходными выводами соединен с входными выводами привода ПР, а также с первыми входными выводами открывающего ОБ, удерживающего УБ и закрывающего ЗБ блоков.
По п.3 формулы новым является то, что дополнительно введен датчик ДН напряжения на нагрузке, выходные выводы которого подсоединены к выводам для подвода напряжения питания к удерживающему блоку. По п.4 формулы остановочный ключ С2 подсоединен параллельно к упомянутым выводам для подвода напряжения питания удерживающего блока. По п.5 формулы выходные выводы датчика ДН напряжения на нагрузке соединены с первыми входными выводами открывающего и закрывающего блоков. Такое исполнение устройства позволяет ускоренно обнаружить короткое замыкание нагрузки и быстро его отключить.
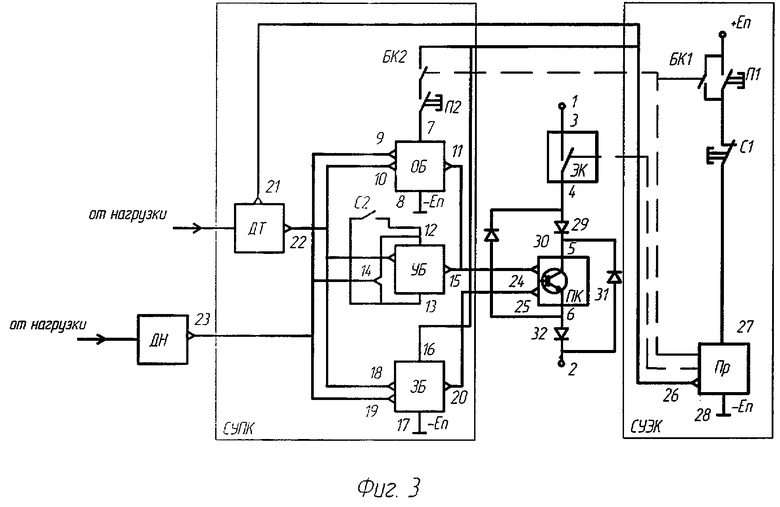
По п.6 формулы новым является также то (фиг.2), что дополнительно введено реле контроля РК, которое входными выводами подсоединено параллельно полупроводниковому коммутатору, а его выходные выводы подсоединены к входным выводам привода ПР, при этом в случае обнаружения неисправности полупроводникового коммутатора, а именно его пробоя, запрещается формирование включающего сигнала для электромеханического коммутатора, что повышает надежность системы электроснабжения с предложенными способом и устройством.
Для работы в режиме рекуперации (фиг.3) дополнительно введены первый, второй, третий и четвертый диоды, при этом они подсоединены так, что при рекуперации избыточной энергии с нагрузки, например, двигателя, в питающую силовую сеть обеспечивают протекание тока рекуперации через полупроводниковый коммутатор в том же направлении, что и при питании нагрузки, что расширяет область применения предложенных способа управления и устройства гибридного коммутационного аппарата. Также такой аппарат может быть использован в цепях переменного тока.
Рассмотрим подробно примеры исполнения предложенных устройств.
На фиг.1 приведено устройство, в котором может быть реализован предлагаемый способ управления и которое содержит: первый 1 и второй 2 неподвижные контакты для соединения с внешней цепью нагрузки, электромеханический коммутатор ЭК с первым 3 и вторым 4 выходными выводами, приводом ПР и системой управления СУЭК, первые пусковая П1 и остановочная С1 кнопки, первые замыкающие блок-контакты БК1, полупроводниковый коммутатор ПК с первым 5 и вторым 6 выходными выводами, первыми 24 и вторыми 25 входными выводами и системой управления СУПК, в которую входят открывающий блок ОБ с выводами 7, 8 для подвода напряжения питания, с входными 9,10 и выходными 11 выводами, удерживающий блок УБ с выводами 12, 13 для подвода напряжения питания, с входными 14 и выходными 15 выводами, закрывающий блок ЗБ с выводами 16, 17 для подвода напряжения питания, с входными 18, 19 и выходными 20 выводами, вторые замыкающие блок-контакты БК2, вторая пусковая кнопка П2, второй остановочный ключ С2, датчик ДТ тока нагрузки с выходными 21, 22 выводами, датчик ДН напряжения на нагрузке с выходными выводами 23, при этом с первым неподвижным контактом 1 для соединения с внешней цепью нагрузки соединен первый вывод 3 электромеханического коммутатора ЭК, второй вывод 4 которого соединен с первым выводом (коллектором) 5 транзистора полупроводникового коммутатора, второй вывод (эмиттер) 6 которого соединен с вторым неподвижным контактом 2 для соединения с внешней цепью нагрузки, при этом к первому - положительному полюсу +Еп сети питания собственных нужд подсоединены первые выводы первых замыкающих блок-контактов БК1 и первой пусковой кнопки П1, вторые выводы которых соединены с первым выводом первой остановочной кнопки С1, второй вывод которой соединен с первым выводом 27 для подвода напряжения питания привода ПР, второй вывод 28 которого соединен с вторым - отрицательным полюсом сети питания собственных нужд, при этом первый вывод вторых замыкающих блок-контактов БК2 и первый вывод 16 для подвода напряжения питания закрывающего блока ЗБ соединены с первым - положительным полюсом сети питания собственных нужд, при этом второй вывод вторых замыкающих блок-контактов БК2 соединен с первым выводом второй пусковой кнопки П2, второй вывод которой соединен с первым выводом 7 для подвода напряжения питания открывающего блока ОБ, а вторые выводы 8 открывающего ОБ и 17 закрывающего ЗБ блоков соединены с упомянутым вторым отрицательным полюсом сети питания собственных нужд, при этом первые выходные выводы 21 датчика ДТ тока нагрузки соединены с входными выводами 26 привода ПР, а вторые выходные выводы 22 упомянутого датчика ДТ соединены с первыми 10, 14 и 18 входными выводами соответственно открывающего ОБ, удерживающего УБ и закрывающего ЗБ блоков, при этом выходные выводы 11 и 15 соответственно открывающего ОБ и удерживающего УБ блоков подсоединены к первым входным выводам 24 полупроводникового коммутатора ПК, а выходные выводы 20 закрывающего ЗБ блока подсоединены к вторым входным выводам 25 полупроводникового коммутатора ПК, при этом электромеханический коммутатор ЭК, первые БК1 и вторые БК2 замыкающие блок-контакты кинематически связаны с приводом ПР, при этом выходные выводы 23 датчика ДН напряжения на нагрузке соединены с выводами 12, 13 для подвода напряжения питания удерживающего блока УБ, а второй остановочный ключ С2 подсоединен параллельно выводам 12, 13 для подвода напряжения питания удерживающего блока УБ.
На фиг.2 приведено предлагаемое устройство, в котором по сравнению с фиг.1 дополнительно введено реле контроля РК с входными 29 и выходными 30 выводами, при этом реле контроля РК входными выводами 29 подсоединено к выходным выводам 5, 6 полупроводникового коммутатора ПК, а выходные выводы 30 упомянутого реле контроля РК подсоединены к входным выводам привода ПР.
На фиг.3 приведено устройство, в котором по сравнению с фиг.1 дополнительно введены первый 29, второй 30, третий 31 и четвертый 32 диоды, при этом с вторым выводом 4 электромеханического коммутатора ЭК соединены; анод первого 29 и катод второго 30 диодов, при этом катод первого диода 29 соединен с первым выводом (коллектором) 5 транзистора полупроводникового коммутатора ПК и с катодом третьего диода 31, а анод второго диода 30 соединен с вторым выводом (эмиттером) 6 упомянутого транзистора полупроводникового коммутатора ПК и анодом четвертого диода 32, катод которого соединен с анодом третьего диода 31 и вторым неподвижным контактом 2 для соединения с внешней цепью нагрузки.
Предлагаемое устройство, схема которого приведена на фиг.1 и 2, работает следующим образом. Режимы работы устройства:
1. режим включения нагрузки;
2. режим оперативного отключения нагрузки;
3. режим отключения нагрузки при перегрузке;
4. режим отключения нагрузки при ее коротком замыкании.
Перед включением электромеханического коммутатора ЭК реле контроля РК (см. фиг.2) определяет исправность полупроводникового коммутатора ЭК и в случае его исправного состояния дает разрешающий сигнал на привод ПР. После этого схемы приводов, приведенные на фиг.1 и 2, работают идентично. При нажатии первой пусковой кнопки П1 по цепи +Еп-П1-С1-27-28 - -Еп протекает ток питания привода ПР и последний выключается, при этом замыкаются рабочие контакты 3, 4 электромеханического коммутатора ЭК, замыкаются первые замыкающие блок-контакты БК1, что обеспечивает питание привода ПР при отжатой первой пусковой кнопке П1, а также замыкаются вторые замыкающие блок-контакты БК2, что обеспечивает возможность включения в работу системы управления СУПК полупроводниковым коммутаторам ПК. При нажатии второй пусковой кнопки П2 ток протекает по цепи: +Еп-БК2-П2-7-8 - -Еп, при этом открывающий блок ОБ начинает формировать открывающий сигнал, который с его выходных выводов 11 подается на первые входные выводы 24 полупроводникового коммутатора ПК, последний открывается и обеспечивает кратковременную подачу напряжения на нагрузку, так как контакты 3, 4 электромеханического коммутатора уже замкнуты, и, если нагрузка исправна, на ней появляется напряжение, которое поступает на датчик ДН, с выходных выводов 23 которого упомянутое напряжение поступает и на выводы 12, 13 для подвода напряжения питания удерживающего блока УБ и последний начинает формировать длительный удерживающий сигнал, который поступает с выходных выводов 15 удерживающего блока УБ на первые входные выводы 24 полупроводникового коммутатора ПК, который обеспечивает постоянную подачу напряжения на нагрузку. Закрывающий сигнал с блока ЗБ на полупроводниковый коммутатор ПК не подается до поступления специального сигнала от датчика ДТ тока нагрузки или датчика ДН напряжения на нагрузке. При исправной нагрузке включение аппарата и нагрузки на этом заканчивается, при этом с выходных выводов 23 датчика ДН на входные выводы 9 открывающего блока ОБ подается сигнал о прекращении работы этого блока. Если нагрузка неисправна, на ней во время работы открывающего блока ОБ не может появиться напряжение, следовательно, его не будет на датчике ДН напряжения на нагрузке и на выводах 12, 13 для подвода напряжения питания удерживающего блока УБ, и последний не может начать формировать длительный удерживающий сигнал. Если короткое замыкание нагрузки происходит за время формирования открывающего сигнала, то по сигналу от датчика ДТ тока нагрузки о коротком замыкании нагрузки, подаваемому с его выходных выводов 22 на входные выводы 10 открывающего блока ОБ последний прекращает работу, то есть перестает посылать открывающий сигнал с выходных выводов 11 на первые входные выводы 24 полупроводникового коммутатора ПК, одновременно по этому же сигналу, подаваемому с выходных выводов 22 на входные выводы 18 закрывающего блока ЗБ, последний формирует закрывающий сигнал, который подается с выходных выводов 20 закрывающего блока ЗБ на вторые входные выводы 25 полупроводникового коммутатора ПК, при этом последний закрывается и короткое замыкание локализуется уже при пуске аппарата, одновременно с первых выходных выводов 21 подается сигнал о коротком замыкании и на входные выводи 26 привода ПР, и последний также отключается.
Так как возможен отказ в поступлении сигналов о прекращении работы открывающего блока ОБ от датчика ДТ тока нагрузки или датчика ДН напряжения на нагрузке, длительность работы открывающего блока ОБ ограничивается интервалом времени, в течение которого происходит появление напряжения на нагрузке. Это позволяет предотвратить неконтролируемое развитие режима короткого замыкания нагрузки при длительной работе открывающего блока ОБ.
Режим оперативного выключения полупроводникового коммутатора ПК осуществляется путем замыкания второго остановочного ключа С2, при этом предотвращается подача напряжения питания на выводы 12, 13 для подвода напряжения питания удерживающего блока УБ, который перестает формировать удерживающий сигнал, поступающий с выходных выводов 15 удерживающего блока УБ на первые входные выводы 24 полупроводникового коммутатора ПК, одновременно с выходных выводов 23 датчика ДН на входные выводы 19 закрывающего блока ЗБ поступает сигнал, в соответствии с которым закрывающий блок ЗБ начинает подавать с выходных выводов 20 закрывающий сигнал на вторые входные выводы 25 полупроводникового коммутатора, последний закрывается и снимает напряжение с нагрузки. Электромеханический коммутатор ЭК может при этом выключаться с помощью первой остановочной кнопки С1, которая прерывает цепь питания привода ПР, при этом привод выключается и размыкаются контакты 3, 4 электромеханического коммутатора ЭК, а также первые БК1 и вторые БК2 блок-контакты.
Режим выключения при перегрузке происходит следующим образом. Датчик ДТ тока нагрузки формирует сигнал о перегрузке, который с выходных выводов 21 подается на входные выводы 26 привода, а с выходных выводов 22 одновременно подается на входные выводы 14 удерживающего блока УБ, который перестает формировать удерживающий сигнал, и на первые входные выводы 18 закрывающего блока ЗБ, который с выходных выводов 20 начинает подавать закрывающий сигнал на вторые входные выводы 25 полупроводникового коммутатора ПК, который в силу своего быстродействия закрывается быстрей, чем отключается электромеханический коммутатор ЭК, который таким образом отключается в бестоковом режиме.
Режим выключения при коротком замыкании нагрузки происходит следующим образом. Режим выключения может быть инициирован как сигналом от датчика ДТ тока нагрузки о ее коротком замыкании, так и сигналом от датчика ДН напряжения на нагрузке об исчезновении этого напряжения на нагрузке в зависимости от того, который сигнал поступит раньше. Следует отметить, что при обычно встречающемся активно-индуктивном сопротивлении силовой питающей сети при коротком замыкании нагрузки напряжение на ней исчезает быстрей, чем ток короткого замыкания нагрузки, изменяющийся по экспоненциальному закону, достигает значения тока уставки. Выключение аппарата при коротком замыкании нагрузки по сигналу от датчика ДТ тока нагрузки уже было рассмотрено при описании процесса включения аппарата. Выключение аппарата по сигналу от датчика ДН напряжения на нагрузке об исчезновении этого напряжения происходит следующим образом. Исчезновение напряжения на нагрузке приводит к автоматическому исчезновению напряжения на входе и выходе 23 датчика ДН напряжения на нагрузке, и на выводах 12, 13 для подвода напряжения питания удерживающего блока УБ, в результате чего последний перестает формировать удерживающий сигнал, подаваемый с выходных выводов 15 на первые входные выводы 24 полупроводникового коммутатора ПК, одновременно с выходных выводов 23 датчика ДН на входные выводы 19 закрывающего блока ЗБ поступает сигнал, по которому упомянутый закрывающий блок ЗБ начинает посылать с выходных выводов 20 закрывающий сигнал на вторые входные выводы 25 полупроводникового коммутатора ПК и последний закрывается, при этом с выходных выводов 21 датчика ДТ тока нагрузки на входные выводы 26 привода ПР подается сигнал, который вызывает отключение привода ПР.
Устройство, приведенное на фиг.3, работает следующим образом. Функции систем управления СУЭК электромеханическим коммутатором ЭК и СУПК полупроводниковым коммутатором ПК остаются теми же, что и на фиг.1 и 2. Отличие заключается в том, что в режиме рекуперации избыточной энергии с нагрузки, например двигателя, варианты гибридного аппарата, приведенные на фиг.1 и 2, не могут пропускать ток рекуперации в питающую сеть без дополнительных переключении, так как ток рекуперации протекает в обратном направлении по отношению к направлению тока при питании нагрузки. В варианте гибридного аппарата, приведенном на фиг.3, ток по силовой цепи при питании нагрузки протекает по контуру 1-3-4-29-5-6-32-2, а при рекуперации, то есть при поступлении энергии от нагрузки в питающую сеть, ток протекает по контуру 2-31-5-6-30-4-3-1, то есть в силовой цепи в обратном направлении, а через полупроводниковый коммутатор в том же направлении, что и при питании нагрузки, поэтому и все функции управления в данном варианте сохраняются.
В заключение необходимо отметить:
1) при изменении полярности напряжений, отмеченных на фиг.1, 2 и 3, изменяются направления прямого включения полупроводниковых приборов;
2) на фиг.1, 2 и 3 для упрощения не показаны известные защитно-демпфирующие устройства в цепях управления и силовых цепях полупроводниковых приборов, состоящие обычно из резисторов, конденсаторов, варисторов и стабилитронов;
3) при реализации предлагаемых вариантов гибридного аппарата может быть использована как трансформаторная, так и оптоэлектронная развязка разнопотенциальных цепей аппарата.
4) упомянутые в тексте блок-контакты могут быть заменены любыми управляемыми ключами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНЫЙ КОММУТАЦИОННЫЙ АППАРАТ ПОСТОЯННОГО ТОКА | 2001 |
|
RU2214645C2 |
| УСОВЕРШЕНСТВОВАННОЕ ГИБРИДНОЕ КОММУТАЦИОННОЕ УСТРОЙСТВО ПОСТОЯННОГО ТОКА | 2009 |
|
RU2382434C1 |
| СПОСОБ ОТКЛЮЧЕНИЯ ПОСТОЯННОГО ТОКА ГИБРИДНЫМ КОММУТАЦИОННЫМ УСТРОЙСТВОМ ПОСТОЯННОГО ТОКА И ГИБРИДНОЕ КОММУТАЦИОННОЕ УСТРОЙСТВО ПОСТОЯННОГО ТОКА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2008 |
|
RU2375779C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД КОММУТАЦИОННОГО АППАРАТА | 2004 |
|
RU2262764C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД КОММУТАЦИОННОГО АППАРАТА (ВАРИАНТЫ) | 2004 |
|
RU2262766C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПРИВОД КОММУТАЦИОННОГО АППАРАТА | 2004 |
|
RU2264673C1 |
| ГИБРИДНЫЙ БЕЗДУГОВОЙ АППАРАТ | 1992 |
|
RU2050616C1 |
| Гибридный коммутационный аппарат | 1990 |
|
SU1746424A1 |
| Стенд для исследования гибридного накопителя энергии | 2020 |
|
RU2739703C1 |
| Реверсивный преобразователь | 1987 |
|
SU1520636A1 |
Изобретение относится к электротехнике, в частности к гибридным электрическим аппаратам, которые содержат последовательно соединенные электромеханический коммутатор и полупроводниковый коммутатор. Технический результат заключается в увеличении надежности и расширении функциональных возможностей. Для этого в устройство, содержащее последовательно соединенные электромеханический коммутатор и полупроводниковый коммутатор, систему управления полупроводниковым коммутатором, содержащую открывающий, удерживающий и закрывающий блоки, а также датчик тока нагрузки, дополнительно введен датчик напряжения на нагрузке, выход которого подсоединен к входам, предназначенным для подвода напряжения питания удерживающего блока, поэтому при коротком замыкании нагрузки исчезает напряжение питания удерживающего блока, что приводит к отключению аппарата. 2 н. и 4 з.п. ф-лы, 3 ил.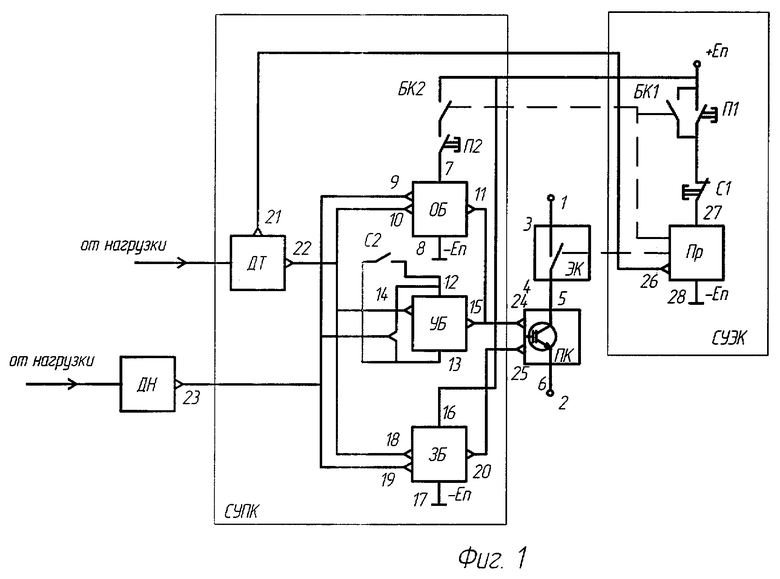
| Могилевский Г.Б | |||
| Гибридные электрические аппараты низкого напряжения | |||
| - М.: Энергоатомиздат, 1986 | |||
| ГИБРИДНЫЙ КОММУТАЦИОННЫЙ АППАРАТ ПОСТОЯННОГО ТОКА | 2001 |
|
RU2214645C2 |
| Устройство для переключения источников переменного тока | 1980 |
|
SU926744A1 |
| Электрические и электронные аппараты | |||
| Под ред | |||
| д.т.н | |||
| проф | |||
| Розанова Ю.К | |||
| - М.: Энергоатомиздат, 1998, с.575, рис.11.15. | |||

