Предлагаемое изобретение относится к электротехнике, а именно к быстродействующим электромагнитным приводам коммутационных аппаратов. Известно, что одним из главных назначений коммутационных аппаратов является быстрое отключение короткозамкнутой нагрузки, что для быстродействующих электромеханических аппаратов может быть достигнуто только при использовании быстродействующих приводов. Известно также, что к числу быстродействующих приводов относятся электродинамические - ЭДП и индукционно-динамические - ИДП приводы, при этом в первом случае электродинамическая сила возникает в результате отталкивания двух встречно включенных, расположенных рядом магнитно связанных катушек, обтекаемых одним током, а во втором случае электродинамическая сила возникает в результате протекания импульса тока через катушку, расположенную рядом с металлическим диском, и взаимодействия упомянутого тока с током, наводимым в упомянутом металлическом диске (Карпенко Л.Н. Быстродействующие электродинамические отключающие устройства. Л.: Энергия, 1973 г.).
Поскольку сила отталкивания между катушками в случае ЭДП пропорциональна квадрату значения тока, протекающего через катушки, а в случае ИДП пропорциональна произведению значений протекающего через катушку и наводимого в диске токов, для получения больших ускорений и больших скоростей подвижной части, то есть катушки в случае ЭДП или диска в случае ИДП, необходимо пропускать через катушки или катушку большие токи, а для улучшения массогабаритных показателей рассматриваемых приводов большие токи через катушки пропускают кратковременно в виде коротких импульсов. Поэтому в качестве источника питания в упомянутых приводах используют обычно предварительно заряженный конденсатор, который может заряжаться, например, от источника постоянного напряжения через резистор и разряжаться на катушки с помощью тиристора (Проектирование электрических аппаратов: учебник для ВУЗов, Г.Н.Александров, В.В.Борисов, Г.С.Каплан и др. Под ред. Г.Н.Александрова. - Л.: Энергоатомиздат. Ленинградское отд-ние, 1985, рис.6.18, стр. 270) или заряжаться от источника переменного напряжения и разряжаться на катушки с помощью трехэлектродного разрядника (Чунихин А.А. Электрические аппараты. Общий курс. Учебник для ВУЗов, - 3 е изд., перераб. и доп. - М.: Энергоатомиздат, 1988, рис. 18.30, стр. 599).
Все упомянутые аналоги имеют общий недостаток, заключающийся в том, что дополнительно к катушке электромагнита привода необходимо вводить конденсатор с зарядным устройством и управляемый ключ для подключения заряженного конденсатора к упомянутой катушке.
Частично вопрос о быстродействии решается в Патенте РФ №2195732 от 27.12.02, в котором последовательно с катушкой электромагнита включен транзистор, управляемый от генератора прямоугольных импульсов, а упомянутая катушка зашунтирована диодом, включенным встречно по отношению к полярности питающего напряжения. При выключении генератора транзистор закрывается, и катушка отключается от источника питания, что должно привести к быстрому отключению привода (отпусканию якоря). Последний вариант привода является наиболее близким к предлагаемому и принят в качестве прототипа. Однако наряду с указанным достоинством прототип также имеет недостаток, который заключается в том, что при запирании транзистора ток через катушку не прекращается, а начинает спадать по экспоненциальному закону, протекая через катушку и шунтирующий ее диод, при этом чем меньше активное сопротивление катушки, которое специально снижают для уменьшения потерь, тем медленнее спадает ток и тем больше время отключения привода. Предлагаемое изобретение позволяет устранить указанный недостаток прототипа.
Технический результат изобретения заключается в том, чтобы увеличить быстродействие привода.
Сущность предлагаемого изобретения заключается в следующем.
Предлагаемый электромагнитный привод содержит катушку электромагнита, диод, шунтирующий катушку и включенный встречно по отношению к полярности питающего напряжения, включенный последовательно с катушкой транзистор, импульсный задающий генератор для управления транзистором и пусковое устройство. Новым является то, что для увеличения быстродействия дополнительно введены второй транзистор, конденсатор и резистор, при этом упомянутый второй транзистор подсоединен параллельно катушке электромагнита во встречном направлении по отношению к напряжению питающей сети и управляется от импульсного задающего генератора, а конденсатор и резистор соединены параллельно между собой и включены последовательно с шунтирующим катушку диодом. Такое исполнение позволяет обеспечивать с одной стороны форсированный и удерживающий режимы работы привода, а с другой стороны быстро отключать привод при прекращении работы импульсного задающего генератора, так как при этом закрывается цепь питания катушки электромагнита и цепь для замыкания спадающего тока катушки. Для снижения перенапряжения на катушке при запирании транзисторов последовательно с диодом включен конденсатор, а параллельно ему включен разрядный резистор, при этом уменьшение емкости позволяет ускорить подход тока катушки к нулевому значению и ускорить выключение привода, но необходимо учитывать при этом повышение перенапряжения на катушке и на транзисторах.
С целью дальнейшего уменьшения времени выключения привода при коротком замыкании нагрузки предложен второй вариант быстродействующего привода, в котором дополнительно введен подсоединенный параллельно нагрузке датчик напряжения на нагрузке, выходные выводы которого подсоединены к выводам для подвода напряжения питания импульсного задающего генератора. Уменьшение времени выключения привода происходит потому, что при обычно встречающемся активно-индуктивном характере сопротивления силовой питающей сети снижение напряжения на нагрузке при коротком замыкании происходит быстрей, чем нарастает ток короткого замыкания до тока уставки.
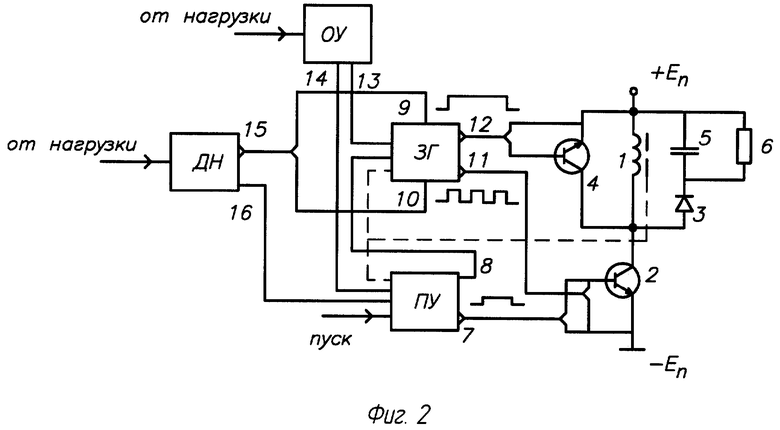
В состав первого варианта предлагаемого быстродействующего привода, изображенного на фиг.1, входят: катушка 1 электромагнита, первый транзистор 2, диод 3, второй транзистор 4, конденсатор 5, резистор 6, импульсный задающий генератор ЗГ с выводами 9, 10 для подвода напряжения питания, с входными выводами и выходными 11, 12 выводами, пусковое устройство ПУ с входными выводами и выходными 7, 8 выводами и традиционное остановочное устройство ОУ с выходными 13, 14 выводами, при этом катушка 1 электромагнита соединена последовательно с первым транзистором 2 и полученная цепь подсоединена к источнику питания собственных нужд Еп таким образом, что первый транзистор 2 выходными выводами подсоединен в прямом направлении по отношению к полярности напряжения сети Еп питания собственных нужд, при этом параллельно катушке 1 выходными выводами подсоединен второй транзистор 4 во встречном направлении по отношению к полярности напряжения сети Еп питания собственных нужд и подсоединена цепь из последовательно соединенных диода 3 и конденсатора 5, причем диод 3 включен во встречном направлении по отношению к полярности напряжения сети Еп питания, а коденсатор 5 зашунтирован резистором 6, при этом выходные выводы 7 пускового устройства ПУ соединены с входными выводами первого транзистора 2, выводы 9, 10 для подвода напряжения питания импульсного задающего генератора ЗГ подсоединены к сети Еп питания, первые выходные выводы 11 упомянутого импульсного задающего генератора ЗГ соединены с входными выводами первого транзистора 2, вторые выходные выводы 12 упомянутого генератора ЗГ соединены с входными выводами второго транзистора 4, первые выходные выводы 13 остановочного устройства ОУ соединены с входными выводами импульсного задающего генератора ЗГ, а вторые выходные выводы 14 упомянутого остановочного устройства ОУ соединены с входными выводами пускового устройства ПУ.
В состав второго варианта быстродействующего привода, приведенного на фиг.2, дополнительно входят: датчик ДН напряжения на нагрузке, входные выводы которого подсоединены к нагрузке, а его выходные выводы 15 соединены с выводами 9, 10 для подвода напряжения питания импульсного задающего генератора ЗГ, при этом выводы 9, 10 задающего генератора с сетью питания Еп не соединены, а выходные выводы 16 датчика напряжения соединены с входными выводами пускового устройства ПУ.
Первый вариант быстродействующего привода работает следующим образом. При подаче напряжения от сети Еп питания собственных нужд на цепь, состоящую из катушки 1 электромагнита и первого транзистора 2, в первом варианте привода, приведенного на фиг.1, на выводы 9, 10 для подвода напряжения питания задающего генератора ЗГ также подается напряжение от сети Еп, при этом запуск задающего генератора ЗГ может осуществляться по трем различным вариантам: запуск от подачи питающего напряжениям на выводы 9, 10 от сети Еп, запуск от пускового устройства ПУ через его выходные выводы 8 и запуск от блок-контактов привода после его включения (эта кинематическая связь показана на фиг.1 и 2 пунктиром). В соответствии с этим пусковой процесс привода также может протекать по трем различным вариантам.
В первом случае задающий генератор начинает работать при подаче напряжения от сети Еп и посылает через первые выходные выводы 11 короткие прямоугольные импульсы на входные выводы первого транзистора 2 и через вторые выходные выводы 12 длительный постоянный открывающий сигнал на входные выводы второго транзистора 4, что обеспечивает протекание через катушку 1 электромагнита привода удерживающего тока. Для включения привода подается пусковой сигнал на пусковое устройство ПУ, которое формирует и через первые выходные выводы 7 посылает на входные выводы первого транзистора 2 постоянный открывающий сигнал, длительность которого либо устанавливается заранее с учетом времени включения привода, либо определяется блок-контактами привода, а именно после включения привода его блок-контактами подается сигнал на прекращение работы пускового устройства ПУ. При работе пускового устройства ПУ через катушку 1 электромагнита протекает постоянный включающий ток по цепи +Еп -1-2- -Еп. После прекращения работы пускового устройства режим включения привода заканчивается и через катушку 1 электромагнита протекает удерживающий ток, который обеспечивается управлением от задающего генератора ЗГ первого транзистора 2, на входные выводы которого подаются прямоугольные импульсы с заданной скважностью, и второго транзистора 4, на входные выводы которого подается постоянный открывающий сигнал, что обеспечивает при открытом первом транзисторе 2 протекание через катушку 1 тока от сети Еп, по цепи +Еп -1-2- -Еп, а при закрытом первом транзисторе 2 протекание спадающего тока через катушку 1 и второй транзистор 4 по цепи 1-4-1.
Во втором случае задающий генератор ЗГ запускается от пускового устройства ПУ через его выходные выводы 8, что позволяет экономить электроэнергию, в остальном процесс включения привода проходит так же, как и в предыдущем случае, в том числе прекращение работы пускового устройства ПУ происходит либо по заранее заданному времени, либо по сигналу от блок-контактов привода после его включения.
В третьем случае запуск задающего генератора ЗГ осуществляется от блок-контактов привода после его включения, что еще более позволяет экономить электроэнергию, в остальном процесс включения привода проходит так же, как и в предыдущих случаях, в том числе прекращение работы пускового устройства ПУ происходит либо по заранее заданному времени, либо по сигналу от блок-контактов привода после его включения.
Выключение привода в рассматриваемом варианте (фиг.1) осуществляется традиционным отключающим устройством ОУ, которое может содержать остановочную кнопку для оперативного выключения привода и датчик тока для получения отключающего сигнала при перегрузке или коротком замыкании нагрузки. При появлении сигнала на выключение привода, как при пуске, так и в установившемся удерживающем режиме, этот сигнал подается через первые выходные выводы 13 отключающего устройства ОУ на входные выводы задающего генератора ЗГ и через вторые выходные выводы 14 на входные выводы пускового устройства ПУ, в результате прекращает работу импульсный задающий генератор ЗГ и пусковое устройство ПУ, если сигнал поступил в процессе пуска привода. Прекращение работы генератора ЗГ и пускового устройства ПУ приводит к немедленному запиранию первого 2 и второго 4 транзисторов, при этом через катушку 1 электромагнита будет протекать спадающий ток по контуру 1-3-5-1, при этом время спада тока катушки 1, а следовательно, и время выключения привода определяется значением емкости конденсатора 5: чем меньше эта емкость, тем меньше время спада тока катушки, но при этом возрастает напряжение на катушке, поэтому следует выбирать компромиссное значение емкости конденсатора 5. Значение сопротивления резистора 6, предназначенного для разряда конденсатора 5, на процесс выключения привода влияет незначительно.
Работа второго варианта быстродействующего привода, приведенного на фиг.2, происходит следующим образом. При поступлении пускового сигнала начинает работу пусковое устройство ПУ, которое через выходные выводы 7 посылает длительный открывающий сигнал на входные выводы первого транзистора 2, при этом упомянутый транзистор 2 открывается и через катушку 1 электромагнита будет протекать включающий ток по цепи +Еп -1-2- -Еп, при этом привод включается, на нагрузке появляется напряжение, следовательно, и на датчике ДН также появляется напряжение, которое поступает на выводы 9, 10 для подвода напряжения питания импульсного задающего генератора ЗГ, последний начинает работать и обеспечивать управление первым 2 и вторым 4 транзисторами, как и в варианте привода, приведенном на фиг.1, то есть в целом обеспечивается удерживающий режим работы привода. Прекращение работы пускового устройства ПУ осуществляется, как и в первом варианте привода, либо заданным временем его работы, либо блок-контактами включенного привода. Кроме того, пусковое устройство получает сигнал о прекращении работы с выходных выводов 16 датчика ДН напряжения на нагрузке после появления напряжения на нагрузке.
Выключение привода происходит следующим образом. При оперативном выключении или при выключении при перегрузке сигнал на выключение формируется в отключающем устройстве ОУ и подается через выходные выводы 13 на задающий генератор ЗГ, а через выходные выводы 14 - на пусковое устройство ПУ, если отключение происходит при пуске.
Выключение привода при коротком замыкании нагрузки может происходить по двум вариантам. В первом случае сигнал на отключение привода формируется в отключающем устройстве ОУ после достижения током короткого замыкания значения тока уставки и посылается, как указано выше, на задающий генератор ЗГ и пусковое устройство ПУ, что приводит к прекращению их работы и выключению привода, так же, как и в варианте привода, приведенного на фиг.1. Во втором случае выключение привода происходит в результате исчезновения напряжения на нагрузке, на датчике ДН напряжения на нагрузке, а следовательно, и на выводах 9, 10 для подвода напряжения питания задающего генератора ЗГ, в результате чего последний прекращает работу и процесс выключения происходит так же, как и в варианте привода, приведенном на фиг.1. Для исключения влияния остаточного напряжения на нагрузке при ее коротком замыкании на скорость отключения привода в датчике напряжения ДН может быть предусмотрен элемент сравнения, например стабилитрон или варистор, который обеспечивает исчезновение напряжения на выводах 9, 10 для подвода напряжения питания импульсного задающего генератора при снижении на нагрузке до заданного уровня в пределах (25-50)% от номинального значения этого напряжения. Для согласования напряжения питания импульсного задающего генератора и постоянного напряжения на нагрузке в датчике напряжения может быть предусмотрен делитель постоянного напряжения. По какому варианту будет происходить выключение привода, а следовательно, и отключение коротко замкнутой нагрузки, будет определяться тем, какое из этих событий произойдет раньше. Известно, что при коротком замыкании нагрузки при обычно встречающемся активно-индуктивном характере силовой питающей сети исчезновение напряжения на нагрузке происходит быстрей, чем нарастание тока до значения тока уставки. Поэтому выключение привода и короткозамкнутой нагрузки должно в основном происходить по второму варианту, что сокращает время обнаружения короткого замыкания, а следовательно, и полное время его отключения.
В заключение необходимо отметить:
1. При изменении полярности напряжений, отмеченных на фиг.1, 2, изменяются направления прямого включения полупроводниковых приборов.
2. На фиг.1, 2 для упрощения не показаны известные защитно-демпфирующие устройства в цепях управления и силовых цепях полупроводниковых приборов, состоящие обычно из резисторов, конденсаторов, варисторов и стабилитронов.
3. При значительных колебаниях напряжения Еп сети питания собственных нужд формирователи сигналов должны иметь в своей структуре блоки стабилизации.
4. При реализации предложенного изобретения может быть применена как трансформаторная, так и оптоэлектронная развязка разнопотенциальных цепей привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОДЕЙСТВУЮЩИЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД КОММУТАЦИОННОГО АППАРАТА | 2004 |
|
RU2262764C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПРИВОД КОММУТАЦИОННОГО АППАРАТА | 2004 |
|
RU2264673C1 |
| Понижающий инвертор | 1980 |
|
SU944029A1 |
| СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ КОММУТАЦИОННЫМ АППАРАТОМ И ГИБРИДНЫЙ КОММУТАЦИОННЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2267184C1 |
| Устройство для управления тиристорным преобразователем | 1982 |
|
SU1023622A1 |
| УСТРОЙСТВО ФОРСИРОВАННОГО ЭЛЕКТРОМАГНИТНОГО ПРИВОДА КОММУТАЦИОННОГО АППАРАТА | 2000 |
|
RU2195732C2 |
| Способ импульсной стабилизации двухтактного статического преобразователя постоянного напряжения | 1987 |
|
SU1495767A1 |
| Синхронизируемый преобразователь постоянного напряжения | 1981 |
|
SU949764A1 |
| Устройство для защиты потребителя от перенапряжений | 1986 |
|
SU1330690A1 |
| АВТОНОМНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ | 2009 |
|
RU2403667C1 |
Предлагаемое изобретение относится к электротехнике, а именно, к быстродействующим электромагнитным приводам коммутационных аппаратов. Применение транзистора, включенного последовательно с катушкой электромагнита, зашунтированной встречным диодом, не позволяет существенно уменьшить время выключения привода. Для уменьшения времени включения (для достижения технического результата) в привод дополнительно введены второй транзистор, конденсатор, резистор и датчик напряжения на нагрузке, при этом оба транзистора обеспечивают импульсный режим работы катушки электромагнита при формировании удерживающего тока, а при выключении привода оба транзистора запираются, и ток катушки замыкается через диод и конденсатор, что позволяет быстро снизить ток катушки, в результате чего сокращается время выключения привода. Питание импульсного задающего генератора от датчика напряжения на нагрузке позволяет еще более ускорить выключение привода при коротком замыкании. 2 с.п. ф-лы, 2 ил.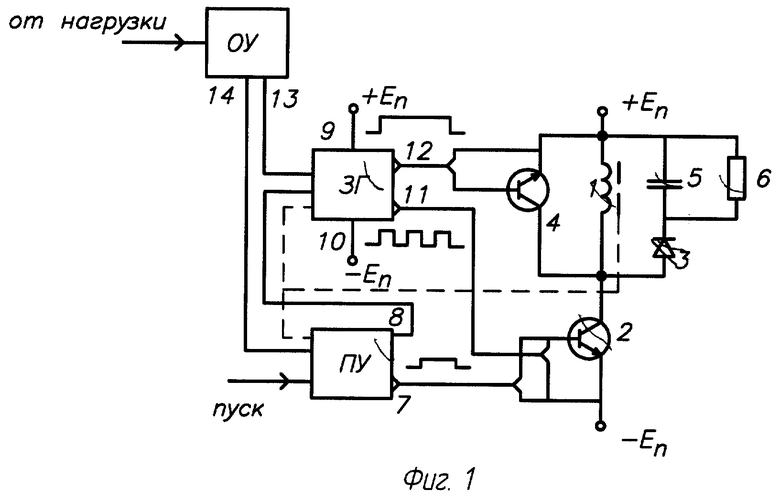
| УСТРОЙСТВО ФОРСИРОВАННОГО ЭЛЕКТРОМАГНИТНОГО ПРИВОДА КОММУТАЦИОННОГО АППАРАТА | 2000 |
|
RU2195732C2 |
| ЭЛЕКТРОМАГНИТ С ФОРСИРОВКОЙ | 2001 |
|
RU2189655C1 |
| GB 23220010 А, 12.08.2002. | |||

