Изобретение относится к радиотехнике и может быть использовано в системах радиосвязи, радиолокации и т.д. при приеме, обнаружении и измерении частоты квазигармонических сигналов с неизвестной несущей частотой.
При построении высококачественных и помехоустойчивых радиотехнических систем, например, навигационных, связных и локационных радиосистем важнейшими проблемами являются максимально помехоустойчивое обнаружение радиоимпульсных сигналов, а также обеспечение достоверных апостериорных оценок значений несущих частот в распространяемых и обрабатываемых радиосигналах, принимаемых на фоне помех. При этом существуют различные методы построения систем выделения (обнаружения) радиосигналов из помех и определения оценок неизвестной несущей частоты [1-5]. Как алгоритмически, так и аппаратно (т.е. схемотехнически) в этих методах используются принципы узкополосной фильтрации, как адаптивной, так и многоканальной. Однако, как показано, например, в [6], эти принципы, основанные на методе максимального правдоподобия, являются оптимальными только асимптотически, т.е. при больших отношениях сигнал/шум. Так, например, многоканальная система обнаружения радиоимпульса с неизвестной частотой при параметрах: вероятности правильного обнаружения - D=0.99955, вероятности ложной тревоги - F=0.01 - будет проигрывать оптимальной одноканальной, т.е. использующей полностью известный сигнал (для радиоимпульса - это известные амплитуда, частота, начальная фаза, длительность и начало отсчета) по отношению сигнал/шум 10 дБ при 100 каналах и уже 20 дБ для 1000 каналов.
В качестве аналогов заявляемому являются следящие фильтры [1], однако к их недостаткам можно отнести, во-первых, недостаточно высокую помехоустойчивость, обусловленную использованием нелинейных элементов типа частотных детекторов, необходимых для определения и индикации частотных отстроек и формирования управляющих сигналов, во-вторых, относительно небольшой диапазон перестройки, определяемый снижением величины управляющего сигнала при первоначальных частотных расстройствах, превышающих полосу пропускания вследствие динамического изменения коэффициента передачи полосового фильтра в процессе перестройки (адаптации), что также снижает реальную помехоустойчивость подобных устройств. Усложнение структуры следящих фильтров за счет, например, дополнительных нелинейных устройств типа ограничителей в петле обратной связи также ведет к ухудшению помехоустойчивости устройств из-за снижения устойчивости.
Прототипом, т.е. наиболее близким устройством к изобретению по технической сущности, является устройство автоматической настройки полосового фильтра, содержащее последовательно соединенные полосовой усилитель-ограничитель, вход которого является входом устройства, перестраиваемый полосовой фильтр в виде первого одиночного колебательного контура Г-образного типа, у которого в продольной ветви находится постоянная катушка индуктивности, а в поперечной ветви - параллельно соединенные переменное сопротивление и конденсатор переменной емкости, управляемые напряжением и подключенные одним выводом к общему проводу, а вторым выводом к выходу полосового фильтра, включенные между входом перестраиваемого полосового фильтра и соединенными параллельно управляющими входами переменных сопротивления и конденсатора последовательно соединенные первый синхронный детектор и первый фильтр нижних частот, последовательно соединенные синхронизатор и пороговое устройство, выход которого является первым выходом всего устройства [7].
Недостатком прототипа является недостаточная помехоустойчивость, обусловленная, во-первых, использованием дополнительных тестовых сигналов, при взаимодействии которых с входными сигналами и изменением структуры последних осуществляется формирование управляющих сигналов для перестройки полосового фильтра, во-вторых, тем, что принятие решения о наличии или отсутствии сигнала (его обнаружение) производится без использования информации о его начальной фазе, в-третьих, тем, что оценка частоты может производиться только на основе зашумленного выходного колебания перестраиваемого полосового фильтра, т.е. не учитывается информация о начальной фазе, в-четвертых, тем, что прототип не является робастным. Как и в аналогах, в прототипе величина управляющих сигналов зависит от начальной отстройки и снижается с ее увеличением, поэтому помехоустойчивость прототипа ухудшается также при увеличении начальной отстройки от первоначальной резонансной частоты полосового фильтра.
Цель изобретения - повышение помехоустойчивости за счет как сохранения характеристик устройства в широком диапазоне частотных отстроек и придания устройству робастных свойств, так и синфазной обработки принимаемого случайного квазигармонического колебания, а также вынесением решения об оценке частоты косвенным методом по колебанию перестраиваемого генератора введенной системы фазовой автоподстройки частоты.
Поставленная цель достигается тем, что в устройство обнаружения и оценки частоты радиоимпульсов, содержащее последовательное соединенные полосовой усилитель-ограничитель, вход которого является входом устройства, перестраиваемый полосовой фильтр типа одиночного колебательного контура в форме Г-образного звена, образованного катушкой индуктивности продольной ветви и параллельно соединенными переменными сопротивлением и конденсатором в параллельной ветви, последовательно соединенные первый синхронный детектор и первый фильтр нижних частот, причем первый вход синхронного детектора соединен с выходом перестраиваемого полосового фильтра, а выход фильтра нижних частот подключен к управляющим входам переменных сопротивления и конденсатора перестраиваемого полосового фильтра, последовательно соединенные синхронизатор и пороговое устройство, выход которого соединен с первым выходом устройства, а выход синхронизатора соединен с бланкирующим входом усилителя-ограничителя, введены соединение второго входа первого синхронного детектора с выходом усилителя-ограничителя, система фазовой автоподстройки частоты в виде соединенных в кольцо фазовым детектором, вторым фильтром нижних частот, сумматором, перестраиваемым генератором, причем, первый вход системы фазовой автоподстройки частоты является вторым входом фазового детектора и соединен с выходом усилителя-ограничителя, а второй вход системы фазовой автоподстройки частоты, являющийся вторым входом сумматора, соединен с выходом первого фильтра низких частот, введены, между выходом перестраиваемого генератора и вторым входом порогового устройства, последовательно соединенные второй синхронный детектор и третий фильтр нижних частот, причем, второй вход второго синхронного детектора соединен с выходом перестраиваемого полосового фильтра, введено устройство выборки для определения частоты колебаний перестраиваемого генератора, при этом у устройства выборки вход соединен с выходом перестраиваемого генератора, выход со вторым выходом устройства обнаружения, а первый и второй управляющие входы соединены соответственно с выходом синхронизатора и выходом порогового устройства, а также введено дифференцирующее устройство, включенное между выходом перестраиваемого полосового фильтра и вторым управляющим входом переменного конденсатора.
Поставленная цель повышения помехоустойчивости достигается, во-первых, за счет введения в систему управления перестраиваемым полосовым фильтром управление его состоянием при помощи использования информации о производной выходного напряжения фильтра, во-вторых, за счет формирования квазиоптимальной синхронной обработки сигналов управления состоянием устройства, а также сигналов коррекции с помощью первого синхронного детектора, в-третьих, за счет формирования синфазного колебания при помощи системы фазовой автоподстройки частоты (ФАПЧ), использующей сигналы коррекции после первого синхронного детектора, в-четвертых, синхронная и синфазная обработка принимаемого и обрабатываемого сигнала с помощью второго синхронного детектора, в-пятых, за счет использования для измерения значения неизвестной частоты мало зашумленного выходного колебания перестраиваемого генератора системы фазовой автоподстройки частоты. Введение обратной связи по производной, вследствие которой реализуются нелинейные режимы работы перестраиваемого полосового фильтра, обеспечивает автоматическое мгновенное управление состоянием этого фильтра при действии мощных помех для снижения их негативного влияния, т.е. робастность (нечувствительность) к этим помехам, что повышает помехоустойчивость устройства.
Использование этих существенных признаков, реализующих при когерентной обработке принимаемого квазигармонического сигнала, во-первых, квазисогласованную робастную фильтрацию этого сигнала узкополосным автоматически перестраиваемым (адаптивным) фильтром, во-вторых, формирование принятия решения о наличии или отсутствии радиосигнала, а также оценивание частоты не по квадратурным составляющим (т.е. при использовании двух каналов), а с помощью синфазного малошумящего опорного колебания, получаемого на основе узкополосной системы ФАПЧ, в-третьих, действительно последовательный принцип: первоначально обнаружение квазигармонического сигнала, а только затем оценивание частоты этого обнаруженного сигнала, обеспечивает функционирование устройства обнаружения радиоимпульса и оценки его частоты с высокой помехоустойчивостью и в большом диапазоне частотных отстроек по сравнению с прототипом. Причем, помехоустойчивость предлагаемого устройства, в котором обеспечивается синхронизм как по частоте, так и по фазе, является близкой к оптимальной.
Предлагаемое устройство обнаружения и оценки частоты радиоимпульсов может быть также обозначено как обнаружитель радиосигнала и измеритель его частоты (ОРСИЧ).
На чертеже приведена структурная схема предложенного устройства обнаружения радиоимпульса и измерения его частоты.
ОРСИЧ содержит последовательно соединенные полосовой усилитель-ограничитель 1, перестраиваемый робастный полосовой фильтр 2 в виде одиночного колебательного контура Г-образного типа, имеющего в продольной ветви постоянную катушку индуктивности L3, первый и второй выводы которой являются соответственно входом и выходом полосового фильтра, и в поперечной ветви параллельно соединенные переменное сопротивление R4 и конденсатор С5 с переменной емкостью, первый управляющий вход которого соединен параллельно с управляющим входом сопротивления R4, а также входящее в состав робастного перестраиваемого полосового фильтра дифференцирующее устройство 6, включенное между выходом полосового перестраиваемого фильтра и вторым управляющим входом переменного конденсатора С5. Устройство содержит также последовательно соединенные первый синхронный детектор 7 и первый фильтр нижних частот 8, выход которого соединен с параллельно соединенными управляющими входами переменных сопротивления и конденсатора, а первый и второй входы первого синхронного детектора соединены соответственно с входом и выходом перестраиваемого полосового фильтра; содержит систему фазовой автоподстройки частоты 9 (ФАПЧ), состоящую из соединенных в кольцо фазового детектора 10, второго фильтра нижних частот 11, суммирующего устройства 12 и перестраиваемого генератора 13, последовательно соединенные второй синхронный детектор 14, третий фильтр нижних частот 15 и пороговое устройство 16, выход которого является первым выходом всего устройства, а первый и второй входы синхронного детектора 14 соединены соответственно с выходом перестраиваемого генератора 13 и выходом перестраиваемого фильтра 2, последовательно соединенные синхронизатор 17 и устройство выборки 18 для определения частоты колебаний перестраиваемого генератора 13, причем, у устройства выборки 18 выход соединен со вторым выходом ОРСЧИ, вход подключен к выходу перестраиваемого генератора 13, а второй управляющий вход - к выходу порогового устройства 16, выход синхронизатора 17 подключен также к управляющему входу порогового устройства 16 и бланкирующему входу усилителя-ограничителя 1. Синхронную работу ОРСИЧ при приеме и обработке радиоимпульсов с конечной длительностью обеспечивает синхронизатор 17.
Устройство ОРСИЧ работает следующим образом:
Входной сигнал в форме аддитивной смеси шума и радиоимпульса с постоянной амплитудой, известной конечной длительностью и с неизвестными случайными несущей частотой и начальной фазой поступает на вход полосового усилителя-ограничителя 1, где производится необходимое усиление-ограничение для нормальной работы последующих нелинейных устройств и формирование случайного процесса в виде радиоимпульса с постоянной или флуктуирующей амплитудой и случайной, изменяющейся во времени, полной фазой. Полная фаза кроме случайной составляющей, вызванной действием аддитивного шума, будет содержать также монотонную составляющую, обусловленную неизвестной, т.е. случайной, но постоянной на интервале наблюдения, несущей частотой радиоимпульса, а также случайную начальную фазу. Величина интервала наблюдения принимается равной длительности радиоимпульса.
Основой ОРСИЧ является перестраиваемый полосовой фильтр 2, выполненный в виде одиночного колебательного контура Г-образного типа с переменными сопротивлением и конденсатором, причем у последнего имеется два управляющих входа для изменения емкости. Следует отметить, что для подобного колебательного контура сдвиг фаз между выходным и входным колебаниями составляет π/2, что упрощает соответствующую последующую процедуру синхронного детектирования. На один управляющий вход конденсатора подается напряжение обратной связи с помощью дифференцирующего устройства 6, пропорциональное производной напряжения на выходе полосового фильтра 2.
При этом повышение помехоустойчивости ОРСИЧ происходит за счет того, что при наличии больших значений переменной шумовой составляющей, спектр которой совпадает с текущей настройкой перестраиваемого полосового фильтра 2, не коррелированная с ней производная этой составляющей изменяет (уменьшает) величину емкости переменного конденсатора, т.е. осуществляет мгновенную отстройку перестраиваемого полосового фильтра 2 от помехи. Таким образом, при управлении за счет производной происходит автоматическая отстройка от мощных помеховых спектральных составляющих.
Аналогично процесс автоматической отстройки происходит, когда мощная случайная помеха структурно совпадает с сигналом, т.е. подавляет его. Только в этом случае за счет уменьшения величины производной происходит мгновенное увеличение емкости, т.е. текущая резонансная частота перестраиваемого полосового фильтра 2 изменяется (уменьшается), и полосовой фильтр автоматически отстраивается от подобной мощной помехи.
Подобная реакция или эффективность нелинейных или параметрических систем под действием шумов является следствием проявления робастных качеств соответствующих алгоритмов обработки и такие системы или устройства принято еще называть робастными.
Чтобы этот процесс происходил при настроенном на полезный сигнал полосовом фильтре, используется вторая дополнительная ветвь обратной связи - обратная связь по управлению, образованная блоками 7, 8, переменным сопротивлением R4, а также вторым управляющим входом переменного конденсатора С5. При этом у принимаемого радиоимпульсного сигнала, имеющего произвольную текущую несущую частоту, т.е. в общем случае отстроенного относительно резонансной частоты перестраиваемого полосового фильтра 2, в начальный момент времени, определяемым моментом поступления бланкирующего импульса от синхронизатора 17, на выходе синхронного детектора 7 появляется напряжение рассогласования. Это напряжение имеет величину, близкую к максимальной, так как до этого момента времени управляющее напряжение на выходе ФНЧ 8 было близким к нулевому и резонанасная частота полосового фильтра 2 равнялась начальной, а полоса пропускания фильтра максимальной. Т.е. в начальный момент времени колебательный контур, рассчитанный на заданный диапазон частотных отстроек, пропускает радиоимпульсный сигнал без ослабления. Первоначальная фильтрация шумовых составляющих осуществляется ФНЧ 8 и в процессе настройки на радиосигнал за счет управляющего напряжения с выхода ФНЧ 8 изменяются величины емкости С5 и сопротивления R4, при этом происходит перестройка резонансной частоты полосового фильтра 2 и сужение его полосы пропускания. Причем, в процессе перестройки величина напряжения рассогласования на выходе синхронного детектора 7 остается приблизительно постоянной, а на выходе ФНЧ 8 напряжение управления нарастает практически линейно до некоторой величины, определяемой начальной частотной отстройкой радиоимпульсного сигнала. Параметры контура и системы управления перестройкой полосового фильтра выбираются таким образом, что полосовой фильтр в конечный момент автоматического процесса настройки является квазисогласованным, настроенным на входной сигнал, а также робастным фильтром, т.е. обеспечивающим помехоустойчивость, близкую к максимально возможной. Однако без учета начальной фазы входного радиоимпульсного сигнала пороговое устройство при обнаружении сигнала может работать только по огибающей узкополосного случайного процесса на выходе полосового фильтра 2. При этом потери могут составлять около 3 дБ по сравнению с синхронной (синфазной) обработкой.
Для реализации максимальной возможной (или достаточно близкой к оптимальной) помехоустойчивости дополнительно используется система ФАПЧ 9, а также взаимное функционирование системы ФАПЧ и адаптивного робастного полосового фильтра 2. При этом система ФАПЧ формирует синфазное с принимаемым радиоимпульсом колебание на выходе перестраиваемого генератора 13 и так как полоса системы ФАПЧ выбирается намного уже (примерно раз в 10) минимальной полосы пропускания фильтра 2, то обеспечение синхронного режима системы ФАПЧ, т.е. вхождение в синхронизм производится за счет корректирующего напряжения, поступающего с выхода ФНЧ 8 на сумматор 12, где оно суммируется с напряжением ошибки системы ФАПЧ. Таким образом, система ФАПЧ имеет комбинированное управление, а именно, управление по фазовой ошибке (управление, создаваемое собственно системой ФАПЧ) и управление по воздействию, внешнее по отношению к системе ФАПЧ. Это позволяет при высокой помехоустойчивости системы ФАПЧ получить малую статическую фазовую ошибку в системе, т.е. сформировать мало зашумленное синхронное (синфазное) опорное колебание. Именно такое синхронное колебание на выходе перестраиваемого генератора 13 и содержит информацию о начальной фазе принимаемого радиоимпульса. Структурно формирование синфазного колебания обусловлено тем, что входы как перестраиваемого полосового фильтра, так и системы ФАПЧ запараллелены.
Для получения соответствующих напряжений, на основе которых близко к оптимальному способу формируются гипотезы о наличии и отсутствии радиосигнала, т.е. решается задача обнаружения радиоимпульса с неизвестными случайными частотой и начальной фазой максимально помехоустойчивым образом, т.е. почти как когерентное обнаружение полностью известного сигнала, используется второй синхронный детектор 14 с третьим ФНЧ 15. На выходе ФНЧ 15 имеется напряжение

где а - коэффициент передачи синхронного детектора 14, τu - длительность радиоимпульса, Δϕ - разность фаз между начальными фазами радиоимпульса и перестраиваемого генератора, UПГ, ϕПГ(t) - соответственно постоянная амплитуда и случайная фаза перестраиваемого генератора, AПФ(t), ϕПФ(t) - соответственно случайные огибающая и фаза выходного напряжения перестраиваемого полосового фильтра.
В выражении (1) выполняется условие ϕПФ(t)□ ϕПГ(t), так как вследствие узкополосности системы ФАПЧ для соответствующих дисперсий имеет место σ2 ϕПФ □ σ2 ϕПГ. Тогда и с учетом синфазности колебания перестраиваемого генератора, т.е. при Δϕ□ 0, выражение (1) приводится к

где AС(t) - косинусная квадратурная составляющая, имеющая дисперсию, равную дисперсии случайного процесса на выходе полосового фильтра 2. Аналогичное выражение для напряжения на выходе перемножителя 14 следует также для случая отсутствия сигнала, только в этом случае аналогичная квадратурная компонента автоматически образуется в координатах, создаваемых перестраиваемым генератором.
Таким образом, напряжение на выходе ФНЧ 15 (согласно выражению (2)), т.е. на входе решающего устройства (порогового устройства 16), является близким по распределению выходному напряжению перестраиваемого полосового фильтра. При этом принятие решения при обнаружении радиоимпульса производится при t=τu, как и для случая с известной начальной фазой, при максимальных значениях сигнала, чем и обеспечивается максимальная помехоустойчивость в заявляемом изобретении.
Оценка частоты является также близкой к эффективной, т.е. максимально помехоустойчивой, так как метод измерения является широкополосным. А именно, выборка из выходного напряжения перестраиваемого генератора производится за время одного периода его колебания, так что высокочастотные шумы фактически не изменяют реальное значение периода, а низкочастотные шумы фильтруются петлей ФАПЧ. Поэтому погрешность измерения частоты будет определяться в среднем аномальными ошибками при неправильном обнаружении радиосигнала пороговым устройством 16. А так как при оптимальном выборе параметров всего устройства помехоустойчивость обнаружителя является максимальной и близкой к оптимальной, то максимально помехоустойчивой будет и оценка частоты.
Таким образом, заявляемое устройство при обнаружении радиоимпульса с неизвестными частотой и начальной фазой реализует при когерентном режиме работы одноканальный и синфазный принцип обработки наблюдаемой аддитивной смеси квазигармонического сигнала и белого гауссового шума.
Когерентная, синхронная работа всего устройства обеспечивается синхронизатором 17.
Таким образом, в устройстве обнаружения и оценки частоты радиоимпульсов обеспечивается высокая помехоустойчивость вследствие, во-первых, адаптивной синхронной настройки перестраиваемого полосового фильтра на входной сигнал и формирования синфазного опорного колебания, во-вторых, подавления мощных шумовых составляющих путем мгновенной перестройки при введении производной отфильтрованного полосовым фильтром напряжения в управление емкостью перестраиваемого полосового фильтра, в-третьих, определения частотной отстройки на основе и после квазиоптимального процесса обнаружения.
Промышленная применимость.
Устройство обнаружения и оценки частоты радиоимпульсов может быть применено в различных областях радиотехники в качестве эффективного фильтра для приема радиосигналов с неизвестными частотой и начальной фазой в системах радиосвязи, радиолокации, в системах синхронизации и т.д.
Источники информации
1. Кантор Л.Я., Дорофеев В.М. Помехоустойчивость приема ЧМ сигналов. М.: Связь, 1977.
2. Системы фазовой автоподстройки частоты с элементами дискретизации / Шахгильдян В.В., Ляховкин А.А., Карякин В.Л. и др. под ред. В.В.Шахгильдяна. М.: Связь, 1979.
3. Шелухин О.И. Радиосистемы ближнего действия. М.: Радио и связь, 1989.
4. Шахтарин Б.И. Случайные процессы в радиотехнике. М.: Радио и связь, 2002.
5. Тихонов В.И. Оптимальный прием сигналов. М.: Радио и связь, 1983.
6. Теория обнаружения синалов / П.С.Акимов, П.А.Бакут, А.А.Богданович и др.; под. ред. П.А.Бакута, - М.: Радио и связь, 1984.
7. А.с. 1626336 (51) 5 Н 03 J 3/00. Ю.А.Скрипник, В.И.Водотовка, Ю.А.Сокурец, И.Ю.Скрипник. Устройство автоматической настройки полосового фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ ПОЛОСОВОГО ФИЛЬТРА | 2003 |
|
RU2248088C1 |
| СПОСОБ МАГНИТНОЙ ВИДЕОЗАПИСИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2013023C1 |
| ВОЛНОВОЙ ОБНАРУЖИТЕЛЬ НЕОДНОРОДНОСТЕЙ | 2006 |
|
RU2313110C1 |
| СПОСОБ ФИЛЬТРАЦИИ И ОБНАРУЖЕНИЯ ФЛУКТУИРУЮЩЕЙ ПАЧКИ РАДИОИМПУЛЬСОВ | 2011 |
|
RU2459350C1 |
| КОМПЕНСАТОР ШУМОВОЙ ПОМЕХИ | 1998 |
|
RU2137297C1 |
| Генератор коррелированной последовательности коротких СВЧ-импульсов | 2023 |
|
RU2833320C1 |
| СИНТЕЗАТОР СВЕРХВЫСОКИХ ЧАСТОТ | 1992 |
|
RU2041564C1 |
| Ультразвуковая эхо-импульсная визуализирующая система | 1987 |
|
SU1449114A1 |
| Оптико-электронное устройство пространственного позиционирования | 1984 |
|
SU1244483A1 |
| СПОСОБ ПРИЕМА СИГНАЛА АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИИ | 2002 |
|
RU2214691C1 |
Изобретение относится к радиотехнике и может быть использовано в устройствах обнаружения и оценки частоты радиоимпульсов, в том числе в системах радиосвязи и радиолокации. Технический результат: повышение помехоустойчивости за счет придания устройству робастных свойств, синфазной обработки принимаемого колебания, вынесения решения об оценке частоты косвенным методом. Поставленная цель достигается введением в систему управления перестраиваемым полосовым фильтром, управления его состоянием, используя информацию о производной выходного напряжения фильтра, формированием квазиоптимальной синхронной обработки сигналов управления устройством и сигналов коррекции с помощью первого синхронного детектора, формированием синфазного колебания при помощи системы фазовой автоподстройки частоты (ФАПЧ), использующей сигналы коррекции после первого синхронного детектора, синхронная и синфазная обработка сигналов проводится с помощью второго синхронного детектора, использованием для измерения значения неизвестной частоты мало зашумленного выходного колебания генератора системы ФАПЧ. Введение обратной связи по производной обеспечивает автоматическое управление состоянием фильтра при действии мощных помех для снижения их негативного влияния. 1 ил.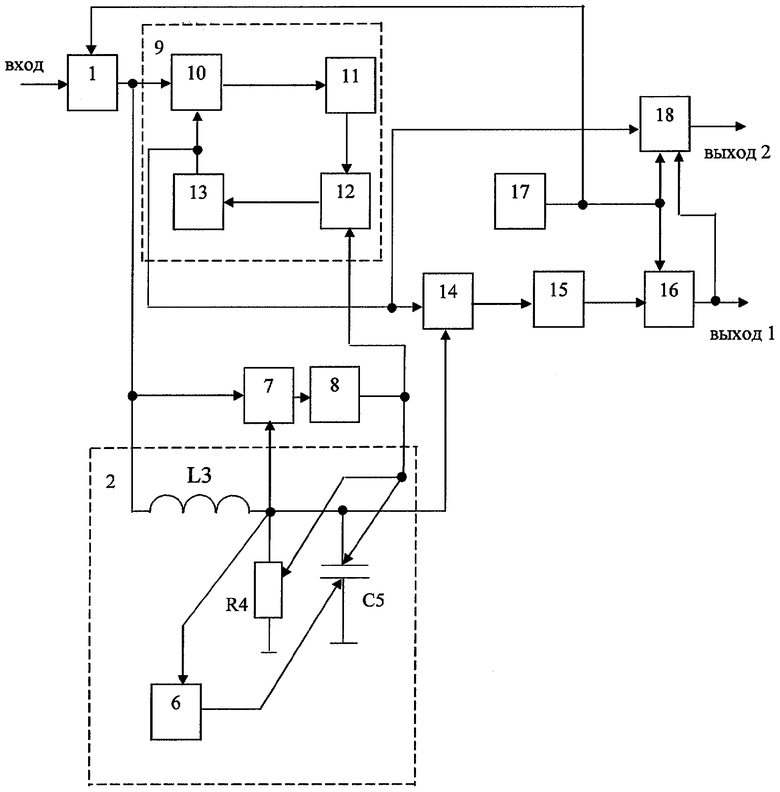
Устройство обнаружения и оценки частоты радиоимпульсов, содержащее последовательно соединенные полосовой усилитель-ограничитель, вход которого является входом устройства, перестраиваемый полосовой фильтр типа одиночного колебательного контура в форме Г-образного звена, образованного катушкой индуктивности продольной ветви и параллельно соединенными переменными сопротивлением и конденсатором в параллельной ветви, последовательно соединенные первый синхронный детектор и первый фильтр нижних частот, причем первый вход синхронного детектора соединен с выходом перестраиваемого полосового фильтра, а выход фильтра нижних частот подключен к управляющим входам переменных сопротивления и конденсатора перестраиваемого полосового фильтра, последовательно соединенные синхронизатор и пороговое устройство, выход которого соединен с первым выходом устройства, а выход синхронизатора соединен с бланкирующим входом усилителя-ограничителя, отличающееся тем, что в него введены соединение второго входа первого синхронного детектора с выходом усилителя-ограничителя, система фазовой автоподстройки частоты в виде соединенных в кольцо фазового детектора, второго фильтра нижних частот, сумматора и перестраиваемого генератора, причем первый вход системы фазовой автоподстройки частоты является вторым входом фазового детектора и соединен с выходом усилителя-ограничителя, а второй вход системы фазовой автоподстройки частоты, являющийся вторым входом сумматора, соединен с выходом первого фильтра низких частот, кроме того, в устройство введены между выходом перестраиваемого генератора и вторым входом порогового устройства последовательно соединенные второй синхронный детектор и третий фильтр нижних частот, причем второй вход второго синхронного детектора соединен с выходом перестраиваемого полосового фильтра, также введено устройство выборки для определения частоты колебаний перестраиваемого генератора, при этом вход устройства выборки соединен с выходом перестраиваемого генератора, выход - со вторым выходом устройства обнаружения, а первый и второй управляющие входы соединены соответственно с выходом синхронизатора и выходом порогового устройства, а также введено дифференцирующее устройство, включенное между выходом перестраиваемого полосового фильтра и вторым управляющим входом переменного конденсатора.
| Устройство автоматической настройки полосового фильтра | 1988 |
|
SU1626336A1 |

