Изобретение относится к радиотехнике и может быть использовано при приеме сигнала фазовой или комбинированной амплитудно-фазовой манипуляции.
Известен способ приема сигналов с угловой модуляцией, заключающийся в преобразовании принимаемого модулированного сигнала путем переноса его спектра в область низких частот и проведения множества измерений (см. патент РФ 2040860, МПК6 Н 04 L 27/22, опубл. БИ 21, 27.07.95 г.) [1].
Недостатком известного способа является невозможность его использования для приема сигналов комбинированной амплитудно-фазовой манипуляции. Между тем, в современных системах передачи информации для повышения спектральной эффективности всей системы манипуляции подвергается не только фаза, но и амплитуда несущего колебания.
Известен также способ приема сигналов амплитудно-фазовой манипуляции, при котором входной сигнал подвергают когерентной демодуляции с восстановлением несущей частоты в системе фазовой автоподстройки частоты (ФАПЧ), выполняют согласованную фильтрацию полученных после демодуляции синфазного и квадратурного сигналов (см. патент РФ 2013018, МПК 5 H 04 L 27/22, опубл. в БИ 9, 15.05.94 г.) [2].
Недостатки известного способа состоят в следующем.
Известный способ не позволяет вычислять входное отношение сигнал/шум. Оптимальный же способ приема и демодуляции сигналов амплитудно-фазовой манипуляции (АФМ) в качестве одной из обязательных операций с сигналом должен предусматривать вычисление отношения сигнал/шум, по величине которого проводится оптимальная настройка на сигнал (изменение полосы и маски согласованных полосовых или низкочастотных фильтров, изменение полосы фильтра ФАПЧ). Это связано с тем, что параметр R входного отношения сигнал/шум входит как параметр в функцию правдоподобия фазы входного сигнала, которая оценивается при когерентном восстановлении несущей частоты амплитудно-фазоманипулированного сигнала (см. Куликов Е.И., Трифонов А.П. Оценка параметров сигналов на фоне помех. - М.: Сов. радио, 1978. - 296 с. [3, с. 86-88] или Банект В. Л. , Дорофеев В.М. Цифровые методы в спутниковой связи. - М.: Радио и связь, 1988. - 240 с. [14, с. 85-90]).
Таким образом, вычисление входного отношения сигнал/шум является необходимой и обязательной процедурой при оптимальном приеме АФМ сигналов, а любые упрощения устройств субоптимальной обработки возможны лишь как предельные переходы при точно измеренном входном отношении R сигнал/шум, например, замена функций гиперболического тангенса th(Rx) на знаковую функцию sign(X) при большом отношении R сигнал/шум (см., например, Боташев Б.М., Пархоменко Н. Г. Оценивание фазы несущего колебания многопозиционных фазоманипулированных сигналов //Вопросы радиоэлектроники. Сер. Общие вопросы радиоэлектроники. -М.: НИИЭИР. - вып. 17, -с. 78-81. [4] или Стиффлер Дж. Дж. Теория синхронной связи. - М.: Связь, 1975. - 488 с. [5, с. 56-72]). Кроме того, при любом способе построения петли ФАПЧ, ширина полосыоптимальной петли прямо пропорциональна некоторой дробной степени отношения R сигнал/шум [5, с. 135] , что опять-таки вызывает необходимость его вычисления. Известный же способ не позволяет производить вычисление входного отношения сигнал/шум и, соответственно, не позволяет оптимальным образом настроить параметры устройств обработки для достижения наивысшей помехоустойчивости приема.
Вторым недостатком известного способа является то, что в известном способе не распознаются (не идентифицируются) ложные захваты по фазе системы (петли) ФАПЧ, что приводит (в случае возникновения ложных захватов) к полной потере информационных символов.
Наличие эффекта ложных захватов по фазе является отличительной особенностью систем синхронизации с АФМ сигналами (см. Simon M.K., Smith J.G. Carrier Synchronization and Detection of QASK Signal Sets. -IEEE Transaction on Communications, 1974, vol. COM-22, 3, p. 98 - 106 [6]), что связано с мультимодальностью функции W(SAФM/ϕ0) правдоподобия АФМ сигнала saom при оценивании начальной фазы ϕ0 или, что то же самое, связано с наличием у функции W(SAФM/ϕ0) нескольких максимумов максиморумов в диапазоне возможных значений ϕ0, приводящих к устойчивым аномальным ошибкам в петле ФАПЧ [3, с. 29-32] . В частности, для наиболее распространенного АФМ ансамбля, - сигнала шестнадцатипозиционной квадратурной амплитудой манипуляции, - во многих работах показано наличие кроме точки истинного захвата ϕ0 = 0° на дискриминационной характеристике оптимального дискриминатора, наличие как минимум одной точки ложного захвата ϕ0≈23° (см., например, Пархоменко Н.Г., Боташев Б.М., Шеляпин Е.С. Исследование схем восстановления несущей частоты сигналов квадратурной амплитудной манипуляции //Вопросы радиоэлектроники, сер. ОВР. - М.: НИИЭИР. - вып. 17, с. 65-76) [7] или [2], [6].
Таким образом, невозможность в известном способе идентифицировать и устранять ложные захваты по фазе обуславливает низкую помехоустойчивость известного способа.
Из известных технических решений наиболее близким к патентуемому способу (прототипом) является способ приема сигналов с амплитудно-фазовой манипуляцией, при котором входной сигнал подвергают когерентной демодуляции с восстановлением несущей частоты в системе фазовой автоподстройки частоты, выполняют согласованную фильтрацию полученных после демодуляции синфазного и квадратурного сигналов, из которых формируют первый и второй сигналы, измеряют математическое ожидание первого сигнала и дисперсию второго сигнала и по измеренным величинам вычисляют отношение сигнал/шум входного сигнала, второй сигнал используют как управляющее напряжение в системе фазовой автоподстройки частоты (см. а. с. 179838, МПК 5 G 01 R 29/26, опубл. в БИ 8, 28.02.93 г.) [8].
Данный способ был выбран в качестве прототипа, поскольку в нем наиболее близко по технической сущности реализуются операции над сигналами патентуемого способа, а именно: когерентно демодулируют сигнал АФМ с восстановлением несущей частоты в системе ФАПЧ; формируют из синфазного и квадратурного сигналов управляющее напряжение для системы ФАПЧ; формируют первый и второй сигналы, по моментам которых (математическое ожидание и дисперсия) вычисляют отношение R сигнал/шум.
Способ-прототип пригоден не только для измерения отношения сигнал/шум входного сигнала, но также для его приема, поскольку при его реализации вырабатываются все сигналы, необходимыедля приема и демодуляции цифровых сигналов (см. , например, а.с. 1679648, МПК 5 H 04 L 27/22, опубл. в БИ 35, 23.09.91 г.) [12].
Недостатком способа-прототипа является его низкая помехоустойчивость при приеме АФМ сигнала, поскольку в этом случае (в отличие от сигнала ФМ) способ-прототип не обнаруживает и не устраняет ложные захваты по фазе.
Работа в режиме ложного захвата по фазе приводит к полной потере информации на выходе демодулятора. Наличие эффекта ложных захватов по фазе является отличительной особенностью систем синхронизации с АФМ сигналами [6], что связано с мультимодальностью функции W(SAФM/ϕ0) правдоподобия АФМ сигнала при оценивании начальной фазы ϕ0 или, что то же самое, связано с наличием у функции правдоподобия W(SAФM/ϕ0) нескольких максимумов максиморумов в диапазоне возможных (допустимых) значений ϕ0, приводящих к аномальным ошибкам в петле ФАПЧ [3, с. 29-32], [6], [7]. Таким образом, невозможность в известном способе обнаруживать (идентифицировать) и устранять ложные захваты по фазе обуславливает низкую помехоустойчивость способа-прототипа.
Технический результат, - повышение помехоустойчивости приема сигналов комбинированной амплитудно-фазовой манипуляции и за счет обнаружения и устранения ложных захватов по фазе достигается выполнением следующих операций над сигналом:
- входной сигнал подвергают когерентной демодуляции с восстановлением несущей частоты в системе фазовой автоподстройки частоты;
- выполняют согласованную фильтрацию полученных после демодуляции синфазного и квадратурного сигналов, из которых формируют первый, второй и третий сигналы;
- измеряют математическое ожидание первого сигнала и дисперсию второго сигнала и по измеренным величинам вычисляют отношение сигнал/шум входного сигнала SАФМ;
- измеряют математическое ожидание третьего сигнала;
- второй сигнал используют как управляющее напряжение в системе фазовой автоподстройки частоты;
- производят аналого-цифровое преобразование синфазного и квадратурного сигналов и получают, соответственно, синфазный Х и квадратурный Y цифровые сигналы, в соответствии с которыми передают потребителю информационные символы;
- в зависимости от величины вычисленного отношения сигнал/шум входного сигнала изменяют параметры системы фазовой автоподстройки частоты;
- по измеренным математическим ожиданиям первого и третьего сигналов идентифицируют тип захвата в системе фазовой автоподстройки частоты и в случае ложного захвата вырабатывают свип-сигнал для системы фазовой автоподстройки частоты;
- формирование первого сигнала Si производят по формуле:
где f - выбранная функция обработки сигналов;
α=const,
- формирование второго сигнала S2 производят по формуле:
S2=f(X;Y),
- формирование третьего сигнала S3 производят по формуле:
Это достигается тем, что по способу приема сигналов амплитудно-фазовой манипуляции входной сигнал подвергают когерентной демодуляции с восстановлением несущей частоты в системе фазовой автоподстройки частоты, выполняют согласованную фильтрацию полученных после демодуляции синфазного и квадратурного сигналов, из которых формируют первый и второй сигналы, измеряют математическое ожидание первого сигнала и дисперсию второго сигнала и по измеренным величинам вычисляют отношение сигнал/шум входного сигнала, второй сигнал используют как управляющее напряжение в системе фазовой автоподстройки частоты.
Согласно изобретению дополнительно формируют третий сигнал и измеряют его математическое ожидание, производят аналого-цифровое преобразование синфазного и квадратурного сигналов и получают, соответственно, синфазный Х и квадратурный Y цифровые сигналы, в соответствии с которыми передают потребителю информационные символы, в зависимости от величины вычисленного отношения сигнал/шум входного сигнала изменяют параметры системы фазовой автоподстройки частоты, по измеренным математическим ожиданиям первого и третьего сигналов идентифицируют тип захвата в системе фазовой автоподстройки частоты и в случае ложного захвата вырабатывают свип-сигнал для системы фазовой автоподстройки частоты, формирование первого сигнала S1 производят по формуле:
где f - выбранная функция обработки;
α=const;
формирование второго сигнала S2 производят по формуле:
S2=f(X; Y),
формирование третьего сигнала S3 производят по формуле:
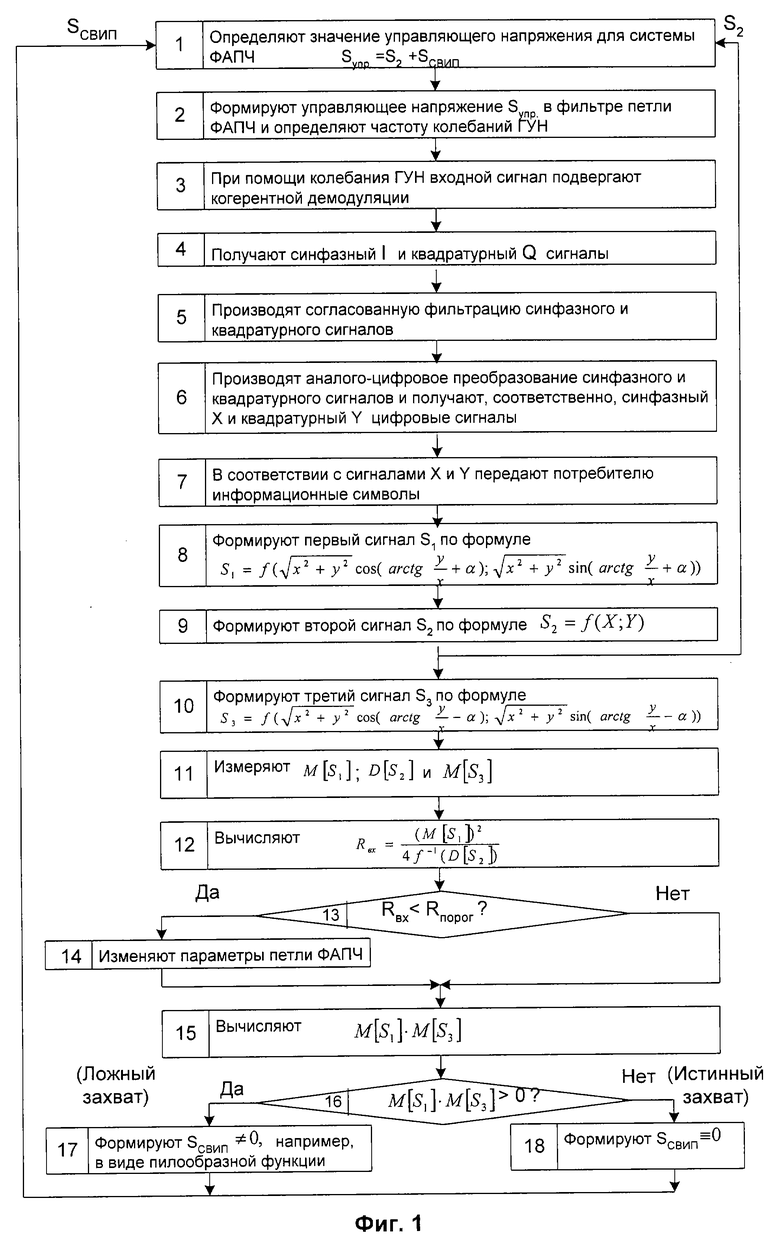
На фиг. 1 приведена структура устройства, реализующего патентуемый способ, на фиг.2 - сигнальная плоскость при когерентном приеме АФМ сигнала, на фиг. 3 - дискриминационные характеристики системы ФАПЧ при восстановлении несущей АФМ сигнала.
Способ демодуляции сигналов амплитудно-фазовой манипуляции состоит из следующих действий над сигналами (см. блок-схему на фиг.1).
На этапе 1 определяют управляющее напряжение для системы ФАПЧ по правилу:
Sупр=S2+Sсвип,
где S2 - значение второго сигнала;
Scвип - значение свип-сигнала.
Поскольку в различных теоретических работах процесс подстройки частоты в системе ФАПЧ трактуется по-разному (например, через воздействие управляющего напряжения на генератор, управляемый напряжением (ГУН) [5, с. 126] или же через воздействие управляющего напряжения на нелинейный элемент (НЭ) [13, с. 275] ), в патентуемом способе использован общий термин "управляющее напряжение для системы ФАПЧ" без конкретизации, каким именно элементом (ГУН или НЭ) оно управляет.
В том случае, если захват в системе ФАПЧ идентифицирован как истинный, как будет показано ниже, Scвип=0 и, следовательно
Synp=S2
На этапах 2, 3, 4 производят когерентную демодуляцию входного сигнала с получением на выходах квадратурных фазовых детекторов синфазного и квадратурного сигналов.
На этапе 5 производят согласованную низкочастотную фильтрацию полученных на этапе 4 синфазного и квадратурного сигналов.
На этапе 6 производят аналого-цифровое преобразование синфазного и квадратурного сигналов и получают, соответственно, синфазный Х и квадратурный Y цифровые сигналы в виде n-разрядных кодов, где n - разрядность АЦП. Все операции с сигналами на последующих этапах производят в цифровом виде.
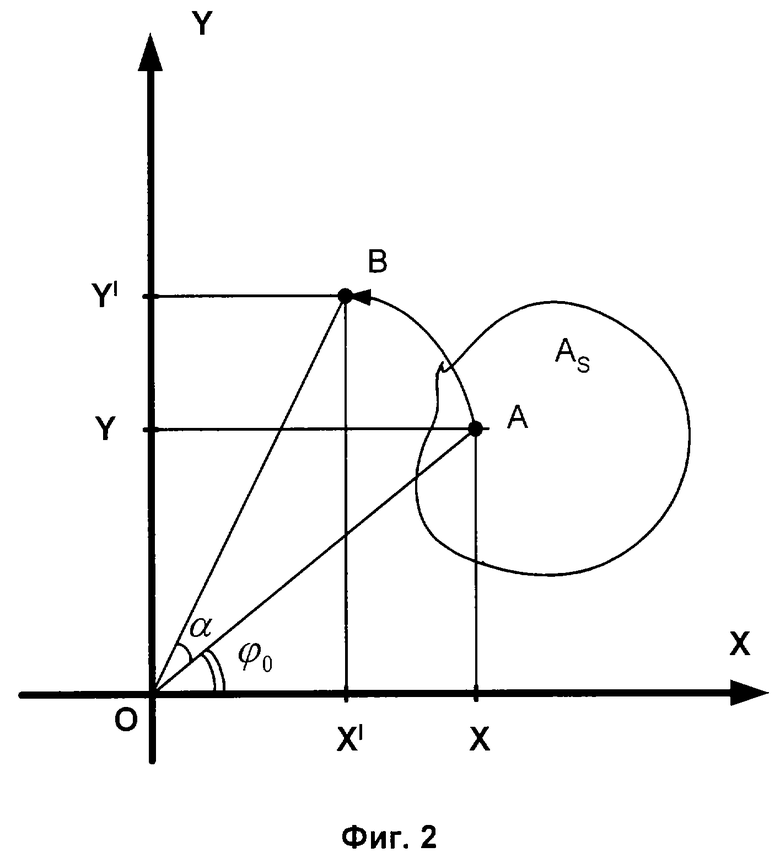
На этапе 7 по значениям Х и Y принимают решение о переданных информационных символах АФМ сигнала в соответствии с выбранным критерием и передают потребителю информационные символы. При реализации критерия идеального наблюдателя Котельникова-Зигерта (см. фиг.2) решение принимают в пользу того информационного символа (As на фиг.2), в оптимальную зону которого попадает точка с координатами (X; Y) (точка А на фиг.2).
На этапах 8, 9, 10 производят формирование первого S1, второго S2 и третьего S3 сигналов.
При практической реализации патентуемого способа формирование этих сигналов производят по одной и той же формуле f в идентичных блоках обработки сигналов в полосе основных частот (БОСПОЧ), при этом получающийся сигнал S используется как управляющее напряжение для системы (петли) ФАПЧ при когерентной демодуляции выходного сигнала (этапы 1, 2, 3).
В соответствии с этим функция f(X; Y) определяется как дискриминационная характеристика по фазе при восстановлении когерентного несущего колебания, а соответствующий функции f(X; Y) блок обработки сигналов является по своей сути дискриминатором по фазе петли ФАПЧ. Поскольку для последующих этапов обработки сигналов требуется вычисление мат. ожидания и дисперсии соответствующих случайных процессов, данные случайные процессы должны быть "очищены" от несущего колебания и именно поэтому формирование управляющего напряжения для петли ФАПЧ производится в блоке, который относится к классу устройств с обработкой в полосе модулирующих или иначе, основных частот (см., например, Феер К. Беспроводная цифровая связь. -М.: Радио и связь, 2000, -с. 126-128, 150) [9].
Термин "полоса основных частот" эквивалентен термину "эквивалентная низкочастотная полоса" и соответствует полосе, занимаемой демодулированными синфазным и квадратурными сигналами [9, с. 126-128].
Такие устройства (БОСПОЧ) хорошо известны и описаны в многочисленных информационных источниках, теоретические основы построения оптимальных дискриминаторов описаны, например, в работах [2, с. 265-277] или [5, с. 238-251].
Практические схемы дискриминаторов приведены в значительном числе патентов (например, патент РФ 2019052, МПК 5 H 04 L 27/22, опубл. в БИ 16, 30.08.94 г. [10] или патент РФ 1758908, МПК 5 H 04 L 27/22, опубл. в БИ 32, 30.08.92 г. [11]).
Например, для фазоманипулированных сигналов в качестве БОСПОЧ может быть использована хорошо известная схема Костаса, для которой функция f имеет вид:
S2=f(X,Y)
S2=Xn•Y1-X1•Yn
где Хn и Yn - n-разрядное ("мягкое") представление квадратурных цифровых сигналов, т.е. n-разрядные коды на выходе соответствующих АЦП;
X1 и Y1 - одноразрядное (знаковое) представление квадратурных цифровых сигналов, т.е. значения старших разрядов соответствующих АЦП.
Такое формирование сигнала S2 даже при очень больших значениях n(n>3) практически эквивалентно каноническому виду дискриминатора Костаса [14, с. 87].
S2=I•sign(Q)-sign(I)•Q,
однако гораздо более удобно с учетом возможностей реализации в цифровом виде.
Для сигнала шестнадцатипозиционной квадратурной амплитудной манипуляции, являющегося частным случаем АФМ ансамбля, БОСПОЧ, описанный в [10], формирует функцию f в виде
где sign(z) - знаковая функция, определяемая следующим образом:
Для других ансамблей АФМ сигналов могут быть использованы другие дискриминаторы петли ФАПЧ, формирующие управляющее напряжение для ГУН по различным законам f(X; Y). Для патентуемого способа существенно лишь то, что независимо от вида ансамбля АФМ сигнала формирование управляющего напряжения для петли ФАПЧ происходит из оцифрованных квадратурных символов в полосе основных частот (по видеочастоте), и, кроме того, выбранная для формирования первого S1, второго S2 и третьего S3 сигналов функция f есть функция двух аргументов (X; Y), спектры которых лежат в основной полосе частот.
Формирование первого S1 и третьего S3 сигналов происходит с помощью той же функции, что и S, но со своими аргументами: (1)
(1)
S2=f(X; Y), (2) (3)
(3)
где α=const.
Для того, чтобы понять физический смысл данных преобразований, рассмотрим сигнальную плоскость (фиг.2). Пусть принимаемый АФМ сигнал, отображаемый на сигнальной плоскости в виде точки А, имеет квадратурные проекции Х и Y.
Если повернуть сигнальную плоскость на некий угол α, то точка А переместится в точку В с новыми координатами X и Y. Учитывая, что при повороте сигнальной плоскости выполняется равенство  , можно из геометрических соображений найти величины новых координат:
, можно из геометрических соображений найти величины новых координат:

Таким образом, сравнивая выражения (4), (5) и (1), (2), (3) можно прийти к выводу, что на этапах (7) и (9) обработки сигналов производится вычисление значения дискриминационной функции для петли ФАПЧ, но от угловых аргументов, соответствующих статическому сдвигу сигнальной плоскости на углы +α и -α, соответственно. На этапе 11 измеряют математическое ожидание M[S1] первого сигнала, дисперсию D[S2] второго сигнала и мат. ожидание М[S3] третьего сигнала.
Как известно, крутизна дискриминационной характеристики схемы восстановления несущей частоты, которую в некоторых допущениях можно рассматривать как производную от логарифма функции правдоподобия  [5, с. 47], [14, с. 86], пропорциональна амплитуде входного сигнала [4, 7]. В то же время, дисперсия управляющего напряжения петли ФАПЧ связана с мощностью шумов входного сигнала [8].
[5, с. 47], [14, с. 86], пропорциональна амплитуде входного сигнала [4, 7]. В то же время, дисперсия управляющего напряжения петли ФАПЧ связана с мощностью шумов входного сигнала [8].
Тогда, как показано в [8], входное отношение Rвx сигнал/шум может быть определено по формуле:
где f1(z) - функция, обратная по отношению к конкретной выбранной функции обработки в полосе основных частот f(z). При переходе к обратной функции должен быть выполнен переход от двух аргументов (декартова система) к полярной системе, в которой учитывается угол ϕ0.
На этапе 12 производят вычисление значения Квх по приведенной выше формуле и, в зависимости от полученного значения, изменяют (подстраивают) параметры петли ФАПЧ [5, с. 135], в частности - полосу фильтра петли ФАПЧ (этап 14). На блок-схеме показан наиболее простой случай, когда параметры петли ФАПЧ имеют лишь два значения для низкого (Rвx<Rпopoг) и высокого (Rвx≥Rпopoг) значений отношений сигнал/шум.
На этапах 15 и 16 вычисляют знак произведения математическое ожидания первого и второго сигналов и по знаку этого произведения идентифицируют тип захвата в петле ФАПЧ:
если М[S1]•М[S3]>0 - захват ложный,
если M[S1]•M[S3]<0 - захват истинный.
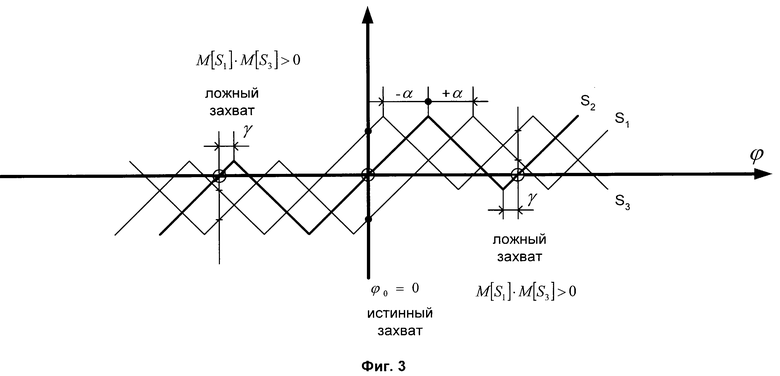
Возможность идентификации типа захвата (или, что то же самое, обнаружение ложного захвата) в петле ФАПЧ поясняется по фиг.3, на которой приведены типичные дискриминационные характеристики ансамбля АФМ сигналов, имеющего точки ложного захвата по фазе ϕ0 (кроме точки истинного захвата ϕ0≡0).
Поскольку точки ложного захвата также являются решением уравнения  , но должны быть отброшены в пользу того решения, которое доставляет глобальный (а не локальный) максимум функции правдоподобия W(SAФM/ϕ0) [5, с. 47], то в практически важных случаях в зоне ложного захвата дискриминационный участок меньше, чем в зоне истинного захвата. Таким образом, формируя сигналы S1 = f(ϕ0+α) и S3 = f(ϕ0-α), можно по их значениям судить о типе решения ϕ0.
, но должны быть отброшены в пользу того решения, которое доставляет глобальный (а не локальный) максимум функции правдоподобия W(SAФM/ϕ0) [5, с. 47], то в практически важных случаях в зоне ложного захвата дискриминационный участок меньше, чем в зоне истинного захвата. Таким образом, формируя сигналы S1 = f(ϕ0+α) и S3 = f(ϕ0-α), можно по их значениям судить о типе решения ϕ0.
Из фиг. 3 видно, что только в случае истинного захвата математические ожидания сигналов S1 и S3 имеют разный знак. При этом параметр α, входящий в формулы для вычисления S1 и S3, должен выбираться из следующего условия: α>γ,
где γ - величина дискриминационного участка в точке ложного захвата (от нулевой точки до точки перегиба дискриминационной кривой).
На этапе 17 формируют ненулевой свип-сигнал Scвип (например, в виде пилообразного напряжения), который управляет сигналом ГУН и, таким образом, устраняет ложный захват.
Таким образом, в патентуемом способе достигается следующий технический результат: обеспечивается повышение помехоустойчивости приема за счет обнаружения и устранения ложных захватов по фазе.
При этом данный способ обеспечивает прием и демодуляцию сигнала произвольного ансамбля АФМ.
Источники информации
1. Патент РФ 2040860, МПК 6 Н 04 L 27/22, опубл. в БИ 21, 27.07.95 г.
2. Патент РФ 2013018, МПК 5 Н 04 L 27/22, опубл. в БИ 9, 15.05.94 г.
3. Куликов Е.И., Трифонов А.П. Оценка параметров сигналов на фоне помех. - М.: Сов. радио, 1878. - 296 с.
4. Боташев Б.М., Пархоменко Н.Г. Оценивание фазы несущего колебания многопозиционных фазоманипулированных сигналов //Вопросы радиоэлектроники. Сер. Общие вопросы радиоэлектроники. - М.: НИИЭИР. - вып. 17. с. 78-81.
5. Стиффлер Дж. Дж. Теория синхронной связи. - М.: Связь, 1975. - 488 с.
6. Simon M.K. Smith J.G. Carrier Synchronization and Detection of QASK Signal Sets. - IEEE Transaction on Communications, 1974, vol. COM-22, 3, p. 98-106.
7. Пархоменко Н.Г., Боташев Б.М., Шеляпин Е.С. Исследование схем восстановления несущей частоты сигналов квадратурной амплитудной манипуляции //Вопросы радиоэлектроники. - М.: НИИЭИР. - Вып. 17, с. 65-76.
8. А. с. 1798738, МПК 5 G 01 R 29/26, опубл. в БИ 8, 28.02.93 г. - прототип.
9. Феер К. Беспроводная цифровая связь. - М.: Радио и связь, 2000, с. 150.
10. Патент РФ 2019052, МПК 5 Н 04 L 27/22, опубл. в БИ 6, 30.08.94 г.
11. Патент РФ 1758908, МПК 5 Н 04 L 27/22, опубл. в БИ 32, 30.08.92 г.
12. А.с. 1679648, МПК 5 Н 04 L 27/22, опубл. в БИ 35, 23.09.91 г.
13. Тихонов В. И. , Харисов В.Н. Статистический анализ и синтез радиотехнических устройств и систем. - М.: Радио и связь, 1991. - 608 с.
14. Банкет В.Л., Дорофеев В.М. Цифровые методы в спутниковой связи. - М. : Радио и связь, 1988. - 240 с.
Изобретение относится к радиотехнике и может быть использовано при приеме сигнала фазовой или комбинированной амплитудно-фазовой манипуляции. Технический результат - повышение помехоустойчивости за счет обнаружения и устранения ложных захватов по фазе - достигается выполнением следующих операций над сигналом: входной сигнал подвергают когерентной демодуляции с восстановлением несущей частоты в системе фазовой автоподстройки частоты (ФАПЧ), вырабатывают управляющее напряжение для системы ФАПЧ, выполняют согласованную фильтрацию полученных после демодуляции синфазного и квадратурного сигналов, из которых формируют первый, второй и третий сигналы, измеряют математическое ожидание первого сигнала и дисперсию второго сигнала и по измеренным величинам вычисляют отношение сигнал/шум входного сигнала, измеряют математическое ожидание третьего сигнала, второй сигнал используют как управляющее напряжение в системе ФАПЧ, производят аналого-цифровое преобразование синфазного и квадратурного сигналов, в соответствии с преобразованными сигналами передают потребителю информационные символы, в зависимости от величины вычисленного отношения сигнал/шум входного сигнала изменяют параметры системы ФАПЧ, по измеренным математическим ожиданиям первого и третьего сигналов идентифицируют тип захвата и, в случае ложного захвата, вырабатывают свип-сигнал для системы ФАПЧ. 3 ил.
Способ приема сигнала амплитудно-фазовой манипуляции, при котором входной сигнал подвергают когерентной демодуляции с восстановлением несущей частоты в системе фазовой автоподстройки частоты, выполняют согласованную фильтрацию полученных после демодуляции синфазного и квадратурного сигналов, из которых формируют первый и второй сигналы, измеряют математическое ожидание первого сигнала и дисперсию второго сигнала и по измеренным величинам вычисляют отношение сигнал/шум входного сигнала, второй сигнал используют как управляющее напряжение в системе фазовой автоподстройки частоты, отличающийся тем, что из полученных после согласованной фильтрации синфазного и квадратурного сигналов формируют третий сигнал и измеряют его математическое ожидание, производят аналого-цифровое преобразование синфазного и квадратурного сигналов, получают соответственно синфазный Х и квадратурный Y цифровые сигналы, в соответствии с которыми передают потребителю информационные символы, в зависимости от величины отношения сигнал/шум входного сигнала изменяют параметры системы фазовой автоподстройки частоты, по измеренным математическим ожиданиям первого и третьего сигналов идентифицируют тип захвата в системе фазовой автоподстройки частоты и в случае ложного захвата вырабатывают свип-сигнал для системы фазовой автоподстройки частоты, формирование первого сигнала S1 производят по формуле
где f - выбранная функция обработки;
α=сonst,
формирование второго сигнала S2 производят по формуле
S2=f(Х; Y),
формирование третьего сигнала S3 производят по формуле г
г
| Способ определения отношения сигнал/шум и устройство для его осуществления | 1991 |
|
SU1798738A1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 1991 |
|
RU2019052C1 |
| ДЕМОДУЛЯТОР СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 1990 |
|
RU2013018C1 |
| SU 1679648 А1, 23.09.1991 | |||
| US 5058136, 15.10.1991 | |||
| Устройство для отделения плоских заготовок от стопы | 1971 |
|
SU486839A1 |
| Устройство для плавного торможения прямолинейно движущегося органа | 1974 |
|
SU497433A1 |
| US 5856027, 08.08.1989. | |||

