Изобретение относится к деталям машин и может быть использовано в качестве приводов изделий авиационной и ракетной техники.
Известен волновой привод, содержащий корпус, установленную в нем волновую передачу с неподвижным гибким колесом, и электродвигатель [1]. Недостатком этого привода является значительная масса и габариты, что вызвано наличием платы значительных размеров.
Этого недостатка лишен волновой привод, содержащий корпус с крышкой, установленную в нем волновую передачу с неподвижным гибким колесом, и электродвигатель, присоединенный n (n=3, 4 и т.д.) винтами к резьбовым отверстиям фланца, снабженного радиальными выступами с наружной поверхностью в виде сферы, размещенными в прорезях гибкого колеса и контактирующими со сферической поверхностью на внутренней поверхности корпуса, выбранный в качестве прототипа [2]. Размещение выступов в прорезях гибкого колеса позволяет устранить плату из конструкции, за счет чего снизить массу и габариты привода. При этом наличие радиальных выступов на фланце с наружной поверхностью в виде сферы позволяет осуществлять самоустановку генератора волн соосно жесткому колесу волновой передачи.
Недостатком такого волнового привода является низкая нагрузочная способность волнового привода, являющаяся следствием того, что прорези гибкого колеса выполнены открытыми, из-за чего существенно снижается жесткость гибкого колеса на кручение. Поэтому при приложении к жесткому колесу большого момента нагрузки (хоть и обеспечивающего работоспособность зубьев волновой передачи по результатам прочностного расчета), возможна потеря гибким колесом устойчивости за счет его скручивания. Кроме того, волновой привод обладает сложной конструкцией, т.к. для обеспечения зацепления гибкого колеса с корпусом требуется наличие специальной крышки, устанавливаемой внутрь гибкого колеса со стороны отрытых прорезей (иначе образованные между прорезями перемычки вследствие малой изгибной жесткости имеют возможность радиального смещения к оси привода и выходу из зацепления с корпусом), что усложняет и удорожает конструкцию.
Техническим результатом, достигаемым с помощью заявленного изобретения, является повышение нагрузочной способности волнового привода за счет повышения жесткости гибкого колеса на кручение и упрощение конструкции.
Этот результат достигается за счет того, что в известном волновом приводе, содержащем корпус, установленную в нем волновую передачу с неподвижным гибким колесом, и электродвигатель с посадочной поверхностью диаметра D, присоединенный n (n=3, 4 и т.д.) винтами к резьбовым отверстиям фланца, снабженного радиальными выступами с наружной поверхностью в виде сферы диаметра d, размещенными в прорезях гибкого колеса и контактирующими со сферической поверхностью диаметра d на внутренней поверхности корпуса, при этом центры сферических поверхностей расположены на оси волнового привода, и привод снабжен фиксатором углового положения фланца относительно корпуса, согласно изобретению прорези гибкого колеса выполнены замкнутыми, число радиальных выступов выполнено равным n, фланец выполнен разборным из n одинаковых сегментов, на каждом из которых размещено по одному упомянутому резьбовому отверстию, на одном из торцов каждого из сегментов выполнен упомянутый радиальный выступ, а второй из торцов каждого сегмента выполнен в виде участка внутренней цилиндрической поверхности диаметра D, контактирующего с посадочной поверхностью электродвигателя.
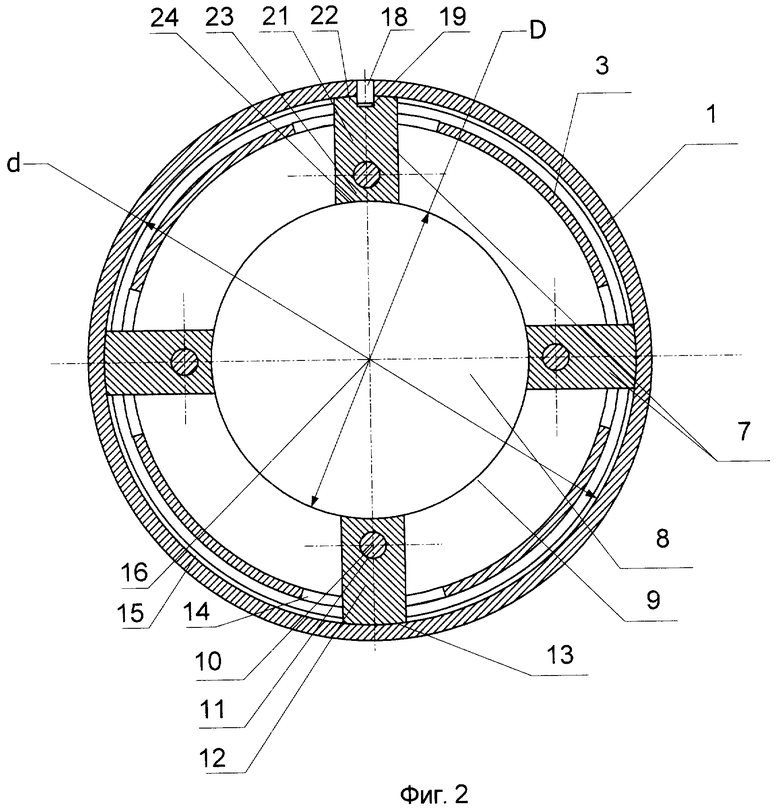
На фиг.1 приведен пример конкретного выполнения волнового привода, продольный разрез, на фиг.2 - то же, поперечное сечение по фланцу, электродвигатель условно показан нерассеченным.
Волновой привод содержит корпус 1, установленную в нем волновую передачу 2 с неподвижным гибким колесом 3 и подвижным жестким колесом 4, выполненным заодно с выходным валом 5, установленным в корпусе 1 на подшипниках 6. В корпусе выполнен фланец 7, на котором установлен электродвигатель 8 с посадочной поверхностью 9 диаметра D, присоединенный n (n=3, 4 и т.д.) винтами 10 к n резьбовым отверстиям 11 фланца 7. Фланец 7 снабжен n радиальными выступами 12 с наружной поверхностью 13 в виде сферы диаметра d, размещенными в замкнутых прорезях 14 гибкого колеса и контактирующими со сферической поверхностью 15 диаметра d на внутренней поверхности корпуса 1, при этом центры сферических поверхностей 13 и 15 расположены на оси 16 волнового привода. Привод снабжен фиксатором 17 углового положения фланца 7 относительно корпуса 1, выполненным в виде штифта 18, запрессованного в корпусе 1 и размещенного в продольном пазе 19 одного из выступов 12. На валу электродвигателя 8 установлен генератор волн 20 волновой передачи. Фланец 7 выполнен разборным из n одинаковых сегментов 21. На каждом из сегментов 21 размещено по одному резьбовому отверстию 11, на одном из горцев 22 каждого из сегментов 21 выполнен радиальный выступ 12, а второй торец 23 каждого сегмента 21 выполнен в виде участка внутренней цилиндрической поверхности 24 диаметра D, контактирующего с посадочной поверхностью 9 электродвигателя 8. Осевая фиксация гибкого колеса 3 относительно корпуса 1 осуществляется выступами 12, размещенными в прорезях 14 гибкого колеса 3.
Волновой привод работает следующим образом: при включении электродвигателя 8 начинает вращаться генератор волн 20, создавая в гибком колесе 3 волну деформации и заставляя вращаться жесткое колесо 4 волновой передачи 2 и выходной вал 5. Поскольку прорези 14, в которых размещены радиальные выступы 12 фланца 7, выполнены замкнутыми, жесткость гибкого колеса на кручение существенно выше, чем у колеса с открытыми прорезями в прототипе, что повышает нагрузочную способность волнового привода. Так как оба края гибкого колеса 3 являются целыми, то в месте шлицевого соединения колеса 3 с корпусом 1 не требуется каких-либо элементов для радиального базирования колеса 3 (как в прототипе). В данном примере конкретного выполнения волнового привода число n выступов 12 равно четырем, однако в общем случае это число может быть любым [n=3, 4 и т.д.]. Минимальное значение n=3 выбрано из следующих соображений: при n=1 невозможна жесткая фиксация фланца 7 относительно корпуса 1; при n=2 такая фиксация возможна, но обладает малой жесткостью в направлении, перпендикулярном оси двух противоположных выступов 12 (нагрузки от фланца 7 и электродвигателя 8 воспринимаются только штифтом 18), что неприемлемо для приводов изделий авиационной и ракетной техники из-за высоких уровней виброперегрузок, которые вызывают разрушение фланца и корпуса в местах контакта сфер 13 и 15. Только при n≥3 обеспечивается надежная фиксация фланца 7 относительно корпуса 1 во всех направлениях. Выполнение фланца 7 разборным из n одинаковых сегментов 21 позволяет обеспечить выполнение прорезей 14 замкнутыми за счет радиальной установки сегментов 21 на их место в конструкции и снизить геометрические размеры прорезей 14 до минимально возможного размера. При этом за счет базирования сегмента 21 по внутренней цилиндрической поверхности 24 диаметра D на посадочной поверхности 9 электродвигателя 8, и по его наружной поверхности 13 на сферической поверхности 15 диаметра d на внутренней поверхности корпуса 1 после затяжки винтов 10 составной фланец 7 приобретает высокую жесткость. При этом сохраняется возможность самоустановки генератора волн 20 по жесткому колесу 4, как в прототипе.
В результате использования изобретения обеспечивается возможность выполнения прорезей гибкого колеса замкнутыми, что позволяет повысить нагрузочную способность волнового привода за счет повышения жесткости гибкого колеса на кручение и упростить конструкцию за счет устранения крышки для радиальной фиксации гибкого колеса. Указанные результаты позволяют рекомендовать заявленный привод к использованию в агрегатах авиационной и космической техники.
Литература
1. Е.Г.Гинзбург, "Волновые зубчатые передачи", Л., "Машиностроение, 1969, стр.125.
2. Патент Российской Федерации N 2085785, МПК: F 16 H 1/00, 1997 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОВОЙ ПРИВОД | 1995 |
|
RU2085785C1 |
| ВОЛНОВОЙ ПРИВОД И СПОСОБ ЕГО СБОРКИ (ВАРИАНТЫ) | 1999 |
|
RU2165044C1 |
| ОСЕВОЙ ВЕНТИЛЯТОР | 2003 |
|
RU2261370C2 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| СПОСОБ ИЗГОТОВЛЕНИЯ И СБОРКИ/РАЗБОРКИ ВОЛНОВОЙ ГЕРМЕТИЧНОЙ ПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ Абрамова В.А. | 2014 |
|
RU2568626C1 |
| ВОЛНОВАЯ ГЕРМЕТИЧНАЯ ПЕРЕДАЧА АБРАМОВА В.А. | 2012 |
|
RU2551556C2 |
| ОСЕВОЙ ВЕНТИЛЯТОР | 2008 |
|
RU2384746C1 |
| ВОЛНОВАЯ ПЕРЕДАЧА С ДВУМЯ ДЕФОРМИРУЕМЫМИ ЗУБЧАТЫМИ ИЛИ ФРИКЦИОННЫМИ КОЛЕСАМИ АБРАМОВА В.А. | 2015 |
|
RU2597055C1 |
| ОСЕВОЙ ВЕНТИЛЯТОР | 2022 |
|
RU2790499C1 |
Изобретение относится к машиностроению, в частности к деталям машин, и может быть использовано в качестве приводов изделий авиационной и ракетной техники. Волновой привод содержит корпус 1, волновую передачу 2 с неподвижным гибким колесом 3, электродвигатель 8 с посадочной поверхностью 9 диаметра D, присоединенный винтами 10 к резьбовым отверстиям фланца 7, фиксатор 17 углового положения фланца 7 относительно корпуса. Фланец 7 выполнен разборным из одинаковых сегментов 21 и снабжен радиальными выступами 12, выполненными на торце 22 каждого из сегментов. Второй торец 23 каждого сегмента выполнен в виде участка внутренней цилиндрической поверхности, контактирующего с посадочной поверхностью 9 электродвигателя 8. Осевая фиксация гибкого колеса относительно корпуса осуществляется выступами 12, размещенными в замкнутых прорезях 14 гибкого колеса 3. Технический результат - повышение нагрузочной способности волнового привода за счет повышения жесткости гибкого колеса на кручение и упрощение конструкции. 2 ил.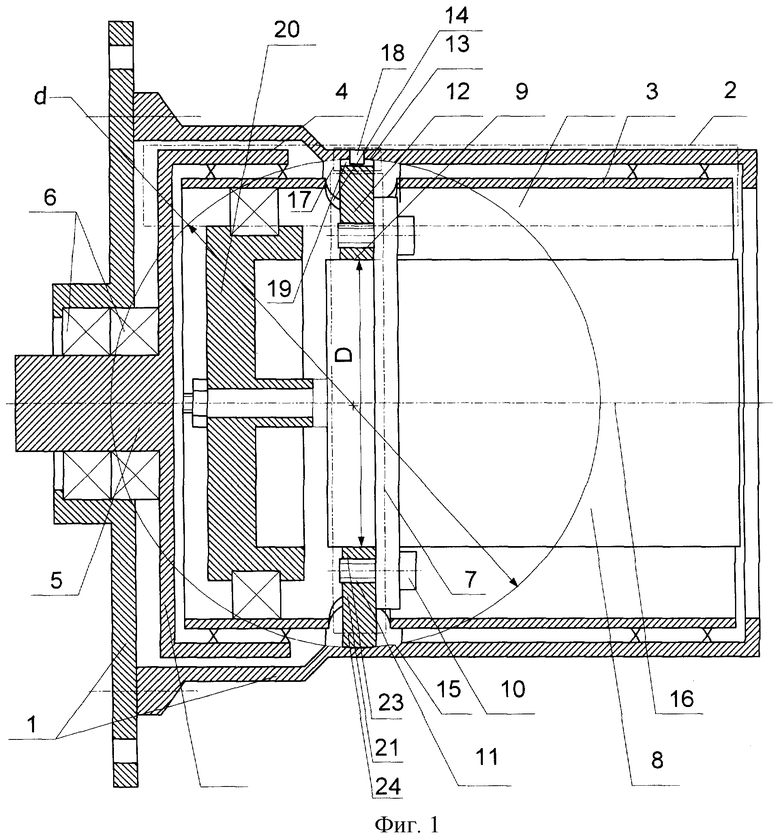
Волновой привод, содержащий корпус, установленную в нем волновую передачу с неподвижным гибким колесом и электродвигатель с посадочной поверхностью диаметром D, присоединенный n (n=3, 4 и т.д.) винтами к резьбовым отверстиям фланца, снабженного радиальными выступами с наружной поверхностью в виде сферы диаметром d, размещенными в прорезях гибкого колеса и контактирующими со сферической поверхностью диаметром d на внутренней поверхности корпуса, при этом центры сферических поверхностей расположены на оси волнового привода, и привод снабжен фиксатором углового положения фланца относительно корпуса, отличающийся тем, что прорези гибкого колеса выполнены замкнутыми, число радиальных выступов выполнено равным n, фланец выполнен разборным из n одинаковых сегментов, на каждом из которых размещено по одному упомянутому резьбовому отверстию, на одном из торцов каждого из сегментов выполнен упомянутый радиальный выступ, а второй из торцов каждого сегмента выполнен в виде участка внутренней цилиндрической поверхности диаметром D, контактирующего с посадочной поверхностью электродвигателя.
| ВОЛНОВОЙ ПРИВОД | 1995 |
|
RU2085785C1 |
| ВОЛНОВОЙ ПРИВОД И СПОСОБ ЕГО СБОРКИ (ВАРИАНТЫ) | 1999 |
|
RU2165044C1 |
| ВОЛНОВОЙ ПРИВОД | 1999 |
|
RU2166141C1 |

