Изобретение относится к производству всех изделий, в которых необходимо регулирование скорости цифровой системой управления при постоянном вращающем моменте, например, в приводах роботов, манипуляторов, барботеров (реакторов), гайковертов, а также автоматики при создании быстродействующих исполнительных механизмов, при выделении радиосигнала из шума без электромагнитных помех в радиотехнических центрах (РТЦ).
Известен «волновой вибродвигатель» (бюл №8, 1978 г., авторы Р.Э. Курыло и др. а.с. СССР №595813, Каунасский политехнический институт), содержащий закрепленный в корпусе пьезопреобразователь, выполненный в виде биморфного пьезокерамического кольца, разделенного на сектора, и с электродами, жестко соединенного с деформируемым элементом, упруго охватывающим ротор, который вращается благодаря волновым деформациям биморфного пьезокерамического кольца. Деформирующий элемент выполнен в виде сплошного кольца, а выходные звено - в виде цилиндра. Волновая деформация деформируемого элемента, создаваемая пьезопреобразователем за счет фрикционной связи, реализуется во вращательное движение выходного звена. Наличие фрикционной связи приводит к нестабильности крутящего момента и снижению передаваемой мощности.
Наиболее близким аналогом (прототипом) по технической сущности к изобретению является «Волновой электродвигатель», содержащий закрепленный в корпусе пьезопреобразователь, выполненный в виде пьезокерамического кольца, установленного с натягом на внутреннюю поверхность тонкостенного стакана, выходное звено, выполненные заодно с эллиптическим кулачком, установленное в подшипниковой опоре, крышки, гибкий подшипник, установленный с натягом на эллиптический кулачок и контактирующий с пьезопреобразователем.
Недостатками волнового электродвигателя являются низкая виброустойчивость, неизбежность разуплотнения выходного звена и корпуса с крышкой, разуплотнений при их консольном (одноопорном) закреплении, низкий ресурс гибкого подшипника и наличие трения скольжения в сепараторах подшипников, заклинивание подшипников при выкатывании шариков за пределы дорожек, отсутствие аналитической проработки профиля эллиптического кулачка и низкая технологичность его обработки, низкая эффективность теплоотвода, отсутствует замковая фиксация резьбовых соединений, защитная функция кожуха ограничена влиянием атмосферы, не проработана система реализации задатчика интенсивности в виде цифрового управления, не выявлена возможность заимствования составных частей двигателя и технологий.
Сущность изобретения
В данном изобретении решаются следующие задачи:
Задача 1 - создание двухопорных виброустойчивых конструкций опор, конструкций выходного звена и корпуса, оснащенных фиксаторами резьбовых соединений при воздействии вибраций.
Задача 2 - повышение ресурса подшипников опор и гибких подшипников, существенное снижение трения скольжения в сепараторах подшипников опор и гибких подшипников путем замены сепараторов с трением скольжения сепараторами с трением качения из шариков в связи с возможностью обкатывания шариков уменьшенного диаметра с телами качения несущими нагрузку, установленных на дорожках с чередованием, и посредством конструктивных решений предотвращения заклинивания шариков от возможных выкатываний на борты колец подшипника по средствам конструктивных решений предотвращения заклинивания шариков от возможных выкатывание на борты колец подшипника посредством ограничителей перемещений элементами конструкции редуктора устройства или посредством конструктивных элементов собственно подшипников по патентам РФ №2519105, №2529931.
Задача 3 - регулирование числа оборотов вала устройства цифровым способом без применения промежуточных передач при постоянном моменте пьезопривода посредством реализации задатчика интенсивности цифрового управления.
Задача 4 - уменьшение величины момента трогания «двигателя» и волнового редукторного механизма с более низким коэффициентом трения подшипников опор и гибкого подшипника, получение малого угла рассогласования между большой осью эллиптического кулачка и большой осью эллипса «деформированного пьезокерамического ПЭП».
Задача 5 - решается задача отвода тепла от двигателя посредством жидкостей, подаваемых в корпус под напором через жидкостные магистрали и поддержания температуры втулок и дисков ПЭП ниже точки Кюри пьезоматериала устройства в рабочем режиме.
Задача 6 - решается задача величины задаваемого вращающего момента путем разработки конструкции биПЭП, т.е. переменноскоростного привода непрерывного, прерывистого и реверсивного вращения вала, волновым зацеплением с широкой впадиной, сдвоенным жестким зубчатым колесом для выборки мертвого хода волновой герметичной передачи.
Задача 7 - решается задача аналитического определения радиусов дуг окружностей при аппроксимации поверхностей эллиптических цилиндров кулачка, наружной и внутренней.
Задача 8 - решается задача создания волнового пьезопривода в герметичном исполнении и его функционирования в зонах, подвергающихся периодическому затоплению агрессивными жидкостями, нефтепродуктами, соленой водой и незаменим в фармакологических барботеров (реакторах), телескопах.
Задача 9 - решается задача стабилизации натяга в контактирующих элементах сцепления кулачка с подшипниками на одноплечем рычаге путем выравнивания встречных деформаций при нагреве-охлаждении парных пьезостолбов, парных распорок и одиночного стержня равных размеров по длине и равных температурных коэффициентов линейных расширений (ТКЛР) материалов пьезокерамики: 1,5*10-6K-1, пьезопассивных конструкционных материалов распорок, например, LI-900, LI-2200, теплозащитный материал плит из волокнистой керамики, ТКЛР которой составляет 3,2*10-7K-1, включая и одиночный стержень, который выполнен составным из материалов с разными ТКЛР.
Технический результат достигается тем, что устройство для получения вращательного движения, включающее корпус, крышку, выходной вал, установленный в опоре крышки, пьезопреобразователь (ПЭП), установленный на крышке, гибкий элемент, выполненный в виде оболочки с кулачком, контактирующим, по крайней мере, с одним подшипником, согласно изобретению, снабжено двумя крышками и двумя эллиптическими цилиндрами, выполненными на кулачке, наружным и внутренним, преимущественно с равными разностями полуосей эллиптических цилиндров, а-b, выполненным заодно с оболочкой гибкого элемента, сопряженного зубчатым соединением, например, волновым, с эллиптическим наружным генератором и гибким подшипником волнового редуктора, при этом оно оснащено бипьезоэлектрическим преобразователем (биПЭП), составленным из четного числа одиночных пьезопреобразователей (ПЭП), контактирующих упруго с эллиптическими цилиндрами кулачка, наружным и внутренним, посредством промежуточных тел, сферических подшипников, дифференциальных винтовых механизмов, регулирующих натяг устройств, установленных на одноплечих и двуплечих рычагах, установленных в опорах на неподвижных основаниях, прикрепленных к кольцевым выступам крышек, выполненных по крайней мере в виде одной пары стержневых пьезопреобразователей из пьезоактивных дисков равных поперечных сечений, одной пары двухчастевых распорок, соединенных лазерной сваркой, в том числе круговым швом, одна часть распорки выполнена в виде балки, имеющий прямоугольное основание со стойками корытного переменного сечения по высоте, снабженной на одной стойке сквозным отверстием, и другая часть распорки выполнена в виде балки, имеющей основание со сквозным отверстием в балке коробчатого сечения со стойками, снабженными уголками, и одиночного с головкой стержня или составной трехчастевой шпильки и метрической резьбой, ввинченных в накладку и установленных с зазором во втулку, запрессованную в основание балки коробчатого сечения, и вторым концом, выполненным со сферическим углублением на торце, причем парные пьезостержни, парные распорки соединены последовательно жестко торцами, и одиночный стержень с метрической резьбой, застопоренный фиксатором резьбовых соединений, выполнены равных размеров по длине, с равными встречными температурными деформациями парных пьезостержней, распорок и одиночного стержня из конструкционного материала или трехчастевого стержня или шпильки, выполненных из материалов с разными температурными коэффициентами линейного расширения.
Кроме того, каждый одноплечий рычаг и каждый двуплечий рычаг снабжен дифференциальным винтовым механизмом, т.е. регулирующим устройством натяга в контакте подшипника с эллиптическими цилиндрами, наружным и внутренним, кулачка, выполненным в виде системы из двух передач винт-гайка с резьбами одинаковых или разных направлений винтовых линий, гайка одной передачи представляет собой ползун-упор, установленный с возможностью перемещения по вертикальной плоскости рычага в направлении осей биПЭП, а гайка другой передачи выполнена в виде ввернутого в рычаг и закрепленного ввертыша; при этом на шейках концов каждого одноплечего рычага и каждого двуплечего рычага установлены, преимущественно, сферические шарикоподшипники, перемещающиеся в радиальных, арочных проемах неподвижных оснований.
Кроме того, жесткое зубчатое колесо ускоряющегося волнового редуктора выполнено сдвоенным из двух жестких колес, основного, установленного на выходном валу, и второго жесткого вставного колеса, установленного в расточке основного с возможностью поворота в окружном направлении на 180о и выборки мертвого хода, т.е. получения беззазорной волновой герметичной передачи, при этом сдвоенное зубчатое колесо снабжено пружинами сжатия, регулирующими усилия пружин винтами и винтами-фиксаторами относительного положения основного и вставного жестких зубчатых колес.
Кроме того, подшипник наружного генератора выполнен с тонкостенными внутренним и наружным кольцами δ=0,02D, сепараторами и шариками и/или подшипник выполнен с тонкостенными кольцами δ=0,02D, без сепараторов, с шариками двух разных диаметров, поочередно расположенных в кольцевых канавках подшипника, при этом гибкий подшипник установлен с натягом во внутреннюю эллиптическую цилиндрическую расточку наружного генератора и на наружный диаметр гибкой подкладной оболочки с натягом, наружное кольцо гибкого подшипника зажато между корпусом наружного генератора и фланцем ограничителя осевого перемещения, а внутреннее кольцо гибкого подшипника установлено с кольцевыми зазорами с выточкой в корпусе генератора и внутренней выточкой во фланце, корпус генератора и фланец, снабжены кольцевыми выступами и установлены с радиальными зазорами и кольцами подшипника и осевыми зазорами в пределах 0,05…0,01 мм между торцами выступов и шариками подшипника, где δ - толщина кольца; D - наружный диаметр кольца подшипника.
Кроме того, эллиптические цилиндры, наружный и внутренний, расположенные на осях эллипсов параллельно, больших и малых, и преимущественно с равной разностью полуосей а-b, выполняются двумя парами дуг окружностей, одной парой дуг окружностей, одной парой дуг окружностей с центрами, расположенными на больших осях 2а по обе стороны от центра эллипса, радиусами  от вершин эллипса, при этом дуги окружности радиусов "r" сопрягают дугами окружностей, описываемых из центров кривизны, расположенных на малой оси 2b эллиптического контура кулачка радиусами:
от вершин эллипса, при этом дуги окружности радиусов "r" сопрягают дугами окружностей, описываемых из центров кривизны, расположенных на малой оси 2b эллиптического контура кулачка радиусами:
где а и b – большая и малая полуоси эллипсов соответственно;
I - квадрат разности длин малой полуоси "b" и фокального параметра "р" эллипса кулачка;
G - произведение суммы и разности длин большой полуоси "а" и малой полуоси "b" или разность квадратов длин большой полуоси "а" и малой полуоси "b" эллипса кулачка.
Кроме того, одиночные ПЭП в парах блоков системы биПЭП расположены между собой перпендикулярно, в одной плоскости, установлены на неподвижных основаниях, прикрепленных к крышкам, снабжены двуплечим и одноплечим рычагами, установленными в опорах, с выполненными на концах рычагов цилиндрическими шейками со сферическими подшипниками на них, которые установлены с возможностью перемещения в радиальном направлении в арках неподвижных оснований и контактирования с наружным и внутренним эллиптическими цилиндрами кулачка.
Кроме того, центральный стержень одиночных ПЭП выполнен сигнальным: снабжен установленными в средней части стержня, соосно с ним, пьезоэлектрическими дисками, пластинчатыми электродами и диэлектрическими дисками.
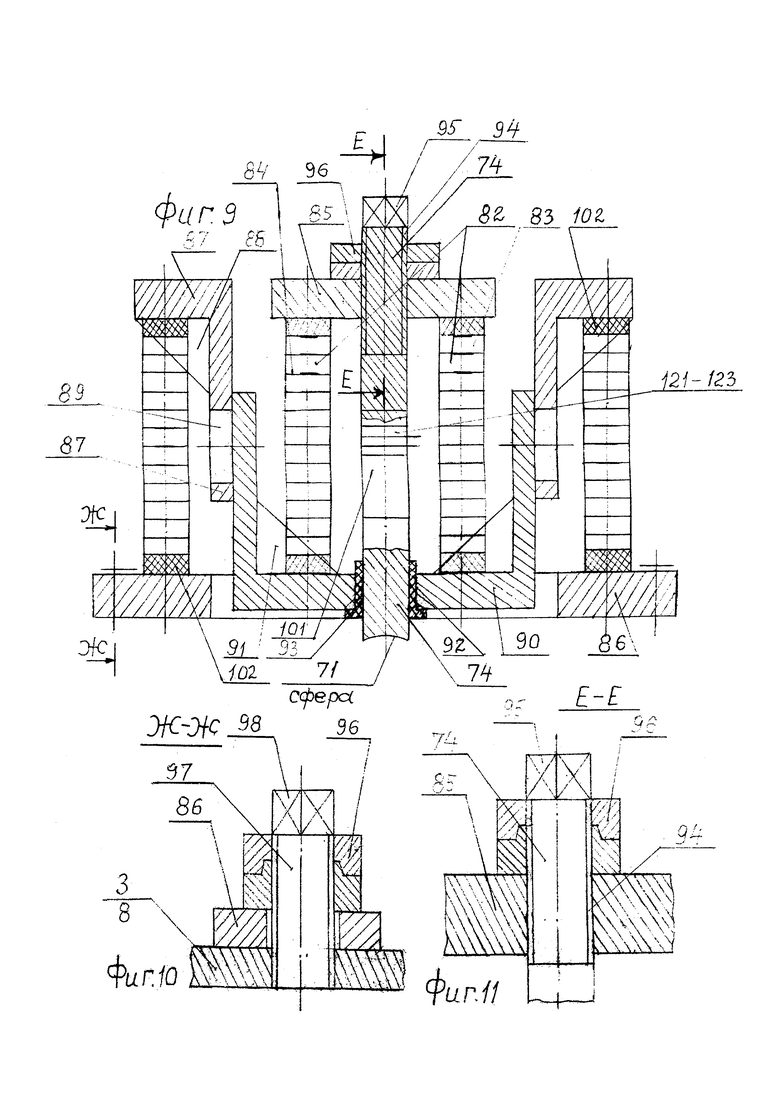
Будучи составными в размерной цепи конструкции единичного ПЭП при его нагревании-охлаждении, фиг. 9, температурные деформации крайних пьезостолбов и пьезостолбов пары 82 и пары двухчастевых распорок 87, 90 и одиночного стержня или шпильки 74, компенсируются, поэтому задача исключения колебаний деформации пьезодисков, слоев клея ДМ5-65 между ними, электродов из латуни и их покрытий серебром, разноразмерных диаметров неподвижных оснований биПЭП и корпуса и от нагрузки рабочей не может быть осуществлена расчетным путем и определяется экспериментально, что способствует обеспечению постоянства натяга ПЭП на эллиптических цилиндрах кулачка.
Возможность реализации
На фиг. 1 изображена конструктивная схема модели устройства для получения вращательного движения в герметичном исполнении с соосными пьезопреобразователями, в разрезе, с волновым редуктором и является бесступенчатым пьезоэлектрическим самотормозящим приводом с постоянным вращающим моментом и регулированием скорости вращения выходного вала посредством задатчика интенсивности в виде цифрового управления с большим диапазоном регулирования скорости, в случае, когда непрерывное регулирование скорости является необходимым технологическим условием, например, в наматывающих устройствах текстильных и бумагоделательных машин.
В устройстве одиночные пьезоэлектрические преобразователи выполнены на базе пьезоэлементов из втулок, установленных соосно, торцы которых жестко последовательно соединены, с использованием пьезомодуля d31, см. поз. 10, 11, 12. Конструктивная сущность и технологичность конструкции в устройстве сочетаются, однако d31 в два раза меньше пьезомодуля d33 и реализация таких ПЭП характерна для применения в устройствах, в которых величина пьезомодуля d31 и конструктивное осуществление пьезоэлектрических преобразователей (ПЭП) из пьезоэлементов равной площади реально, а на базе пьезомодуля d33 изготовление пьезоэлектрических преобразователей (ПЭП) из дисковых стержневых втулок и столбов характерно для более широкого круга применений, но трудоемко в изготовлении, см. поз. 13 фиг. 1.
Устройство содержит корпус 1 с монтажной перегородкой 2, к которой крепится с центрированием неподвижное основание 3, установленное в цилиндрическом кольце - выступе 4 крышки 5. На крышке 6 выполнен цилиндрический выступ 7, на котором установлено неподвижное основание 8.
На основаниях 3 и 8 установлено по пять пар пьезоэлектрических преобразователей (ПЭП) 9, выполненных из соосно установленных втулок 10, 11, 12 из пьезоактивной керамики, торцы которых жестко последовательно соединены клеем ДМ5-65 и ПЭП13, выполненных в виде втулок или столбов, склеенных из шайб или дисков, торцы которых жестко последовательно соединены накладками 14 посредством клеевых соединений, которые в совокупности образуют бисистему ПЭП устройства, посредством накладок 15 и промежуточных тел 16, одноплечих рычагов 17, установленных в опорах, выполненных в виде пластин 18 и колец 19.
На кольцевом выступе 20 съемной крышки 6, в неподвижном основании 8 и фланце 28 гибкого зубчатого колеса 29 установлены подшипниковые опоры 30, 31 выходного вала 22.
Крышки 5, 6 и корпус сопряжены герметичными соединениями шип-паз 24 и прокладками и снабжены гермоэлектровводами 23. Корпус 1 устройства снабжен патрубком 25 для заполнения электроизоляционной жидкостью 132-12Д ГОСТ 10916-74 и кольцевой камерой 26 с патрубком 27 для прокачки охлаждающей жидкости, например, водой водопроводной.
Каждый одноплечий рычаг 17 биПЭП снабжен дифференциальным винтовым механизмом, т.е. регулирующим устройством натяга между единичными ПЭП и эллиптическими поверхностями, наружной и внутренней кулачка 32. Регулирующее устройство натяга выполнено в виде системы из двух передач винт-гайка с резьбами одинаковых, правого или левого, или разных направлений винтовых линий, гайка одной передачи представляет собой ползун-упор 33, установленный с возможностью перемещения по вертикальной плоскости рычага 17 в направлении поверхностей кулачка 32, а гайка другой передачи выполнена в виде ввернутого в рычаг и закрепленного ввертыша (футорки) 34. На шейках 35 концов каждого одноплечного рычага 17 установлены сферические подшипники 36, шариковые радиальные однорядные с уплотнениями ГОСТ8882-75, перемещающиеся в радикальных арочных проемах (окнах) 37, 103 неподвижных оснований 3,8 и находящиеся в упругом контакте с поверхностями кулачка 32. Радиальное 38 торцовое 39 уплотнения выходного вала 22, фланцев 28, 40, гибкого колеса 29, подкладной оболочки 41 выполнены посредством резиновых колец в оболочке из фторопласта ТУ-2513-013-34724672-2010, установленных в канавки ГОСТ9833-73.
Фланец 40 и крышка 5 зафиксированы соединением шип-паз 42 и прокладкой.
По фиг. 1 заявитель сообщает необходимость - информацию по макетам электронных схем управления, макету устройства пьезоприводов, зубчатому и фрикционному, и отчетов по ним, см. международный журнал "Трубопроводная арматура и оборудование", №3 (84), 2016. с. 40…42 "Волновые пьезоэлектрические приводы: устройство и применения", Абрамов В.А., Абрамова М.В.
На фиг. 2 изображен вид по стрелке А фиг. 1 - устройство составного зубчатого жесткого колеса 43 волнового ускоряющего редуктора. Жесткое зубчатое колесо 43 выполнено сдвоенным и имеет кольцо 44, жесткое зубчатое, установленное в расточке основного жесткого зубчатого колеса 45 с возможностью поворота в окружном направлении на 180° и выборки мертвого хода в волновой ступени, т.е. получении беззазорной волновой герметичной передачи и ее плавности работы. Упоры 46 прикреплены винтами 47 к основному зубчатому колесу 45, в которые упираются пружины сжатия 48, установленные в резьбовые отверстия 49, усилия которых устанавливаются винтами 50, ввернутыми в упор 51, выполненный на основном зубчатом колесе 45.
Планки 52, прикрепленные винтами 53 к вставному зубчатому колесу 44 также являются направляющими вставного зубчатого колеса 44 и одновременно служат для размещения винтов-фиксаторов 54 относительного положения основного 45 и вставного 44 зубчатых жестких колес редуктора, при этом для введения в действие пружин 48 винты-фиксаторы 54 удаляются через отверстие 55, которое закрывается фланцем 56.
Сдвоенное жесткое зубчатое колесо 43 на выходном валу 22 фиксируется кольцом 57.
Для выборки мертвого хода волновой герметичной передачи, т.е. свободного перемещения в некоторых пределах входного звена при неподвижном выходном звене, служат пружины сжатия 48, расположенные в составном 43 зубчатом жестком колесе передачи, фиг. 2.
Пружины 48 обеспечивают контактное окружное усилие контактирующих зубьев волнового зацепления гибкого 29 и жесткого 43 колес.
Зубчатое колесо 44 фиксируется в расточке колеса 45 секторами 47, 52. Передаточное отношение I волновой герметичной передачи определяется по зависимости  , где Y1 и Y2 - углы поворота конечных звеньев передачи, вызванной погрешностями изготовления отдельных звеньев, их сборки, деформацией в процессе работы передачи.
, где Y1 и Y2 - углы поворота конечных звеньев передачи, вызванной погрешностями изготовления отдельных звеньев, их сборки, деформацией в процессе работы передачи.
Исключение мертвого хода передачи позволяет снизить величину слагаемого (вычитаемого) ΔY преимущественно в кинематических передачах. Дальнейшее уменьшение величины ΔY, в которой доминирует плавность передачи, может быть получено за счет повышения параметров точности передачи при изготовлении всех элементов звеньев передачи, точности формы поверхностей, размеров, устранения вибрации звеньев передачи, точности формы поверхностей, размеров, устранения вибрации звеньев, а функция i ограничена величиной ΔY=±4' для волновой негерметичной передачи с венцами 7 класса точности. (Б.И. Павлов, Л.С. Чернова. Волновые мелкомодульные зубчатые передачи и результаты их проверки на кинематическую точность ЛДНТП, Ленинград, 1968).
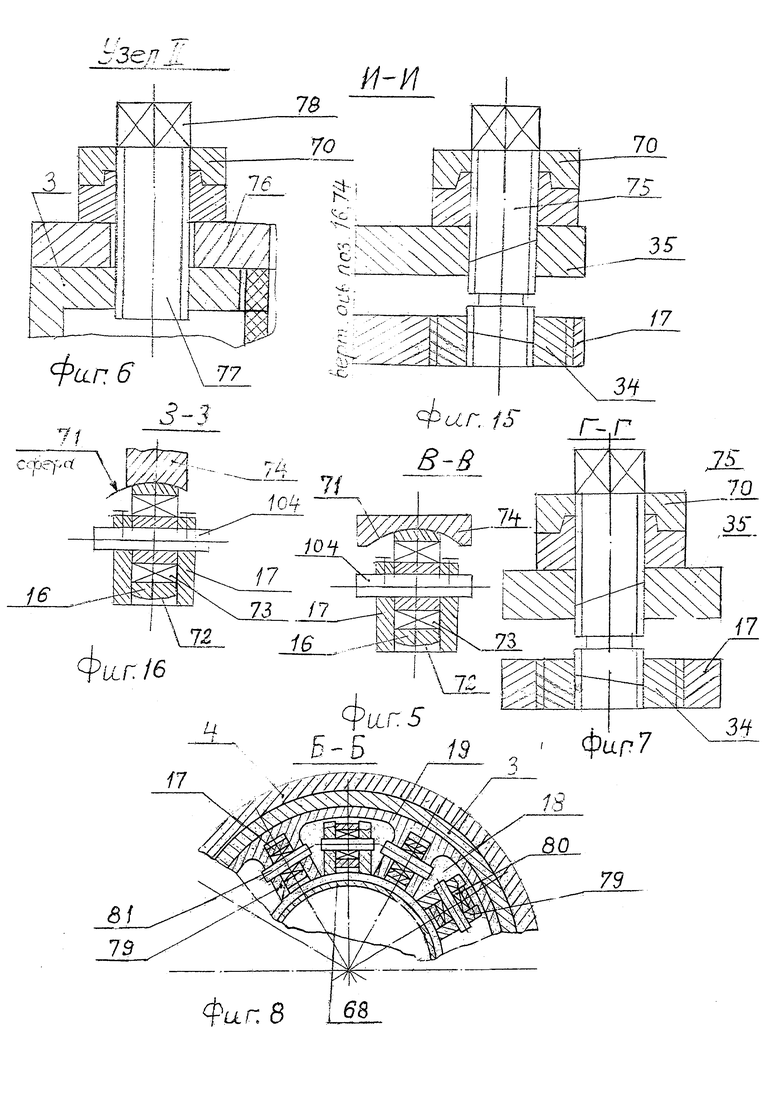
На фиг. 3 изображен Узел I - относительное расположение элементов волнового ускоряющего зубчатого редуктора: на кольцевом выступе 58 крышки 5 подшипниковой опоры 59, гибкого подшипника 60 в эллиптической расточки 61 наружного генератора 62, волнового зубчатого соединения 63 и гибкой оболочки 68, передающий вращающий момент с кулачка 32 генератору 62.
В гибком подшипнике 60, установленном с натягом на подкладной оболочке 41, сепараторы выполнены с трением качения из шариков, чередующихся на дорожках качения, шариков двух диаметров: шариков большего диаметра, несущих нагрузку, и шариков меньшего диаметра, обкатывающихся с шариками большего диаметра, при этом шарики большего диаметра в подшипниках снабжены ограничителями осевого перемещения шариков, выполненными в виде цилиндрического выступа 64 в корпусе генератора 62 и цилиндрического выступа 65 на фланце 66 с другой стороны ряда шариков, прикрепленном винтами 67 к торцу наружного генератора 62 и установлены с осевыми зазорами в пределах 0,05…0,1 мм между торцами ограничителей 64, 65 и шариками подшипника большего диаметра.
На фиг. 4, сечении D-D на фиг. 1, изображен узел крепления корпуса 1 с крышками 5, 6, предотвращающий ослабления болтовых соединений 69 посредством фиксаторов 70 резьбовых соединений ТУ 1600-016-31049464-9454-2015, зарегистрированного и внесенного в реестр учетной регистрации 02.11.2015.
На фиг. 5, сечение В-В на фиг. 1, изображено сопряжение промежуточного тела 16, выполненного в виде подшипников 73, шариковых радиальных однорядных с уплотнениями и сферической наружной поверхностью наружного кольца. Вкладышные подшипники, ТУ ВНИПП. 016-03, которые обеспечивает сферический контакт 71 по поверхности 72 пары 16-15 и пары 73-74(фиг. 9 и 5).
На фиг. 6 изображен Узел II - крепление одиночных ПЭП к неподвижным основаниям 3, 8 посредством шпилек 77 с метрической резьбой и головкой 78 и фиксатором 70 резьбовых соединений HARDLOCK, www.zavod-rekom.ru.
На фиг. 7, сечение Г-Г на фиг. 1, изображен узел натяга в линейном контакте посредством регулирующего устройства, выполненного в виде системы из двух передач винт-гайка, между парами 36-32, фиксирующего натяг фиксатором 70 резьбовых соединений HARDLOCK, www.zavod-rekom.ru.
На фиг. 8. Сечение Б-Б на фиг. 1, изображены конструкции опор, выполненных в виде пластин 18 и колец 19 и установленных в неподвижные основания 3, 8.
Одноплечие рычаги 17 установлены в проушинах 79 посредством подшипников 80 и осей 81.
Механическая прочность при сжатии пьезокерамики может достигать 5000-6000 кгс/см2 и при растяжении 300-350 кгс/см2 (Глозман И.А. Пьезокерамика, «Энергия», 1972, с. 264) [1] Однако, допускаемые напряжения, которыми руководствуются в разработках существенно меньше.
По этой причине в предлагаемой заявке на изобретение малые допускаемые величины напряжений при растяжении в единичных ПЭП для обеспечения надежности пьезоэлементов являются малоэффективными и не используются.
На фиг. 9 изображен доминирующий вариант единичного ПЭП в биПЭП устройства, которых в биПЭП 20, например.
БиПЭП образован из соосно расположенных многопарных единичных, устанавливаемых в одной плоскости ПЭП, выполненных в виде нескольких пар стержневых столбов 82, склеенных из дисков 83 клеем ДМ5-65 и пластинчатых электродов 84 между дисками, при этом стержневые пьезостолбы 82 установлены на их рабочее местоположение на накладках 85, 86 и на парных двухчастевых распорках 87; одной частью распорок являются стойки 88 корытного переменного сечения по высоте, снабженной сквозным отверстием 89 для выполнения сварного кругового шва лазером в дополнение к шву сварному, выполняемому по наружному контуру соединения стоек 88 с другой частью 90 - балкой коробчатого сечения с уголками 91 и сквозным отверстием 92 на центральной оси сечения балки.
Столбы 82 снабжены диэлектрическими дисками 102 на концах и приклеиваются клеем ДМ5-65 ОСТ5.9131-73 к рабочим местоположениям на соответствующих деталях.
Каждый единичный ПЭП снабжен стержнем 74 или трехчастевым стержнем 101, имеющем на торце конца сферическое углубление 71, один конец стержня 74 или 101 установлен во втулке 93, которая демпфирует колебания стержня и установлена с натягом в детали 90. Другой конец стержня 74 или трехчастевого 101, выполненный из материалов с разными ТКЛР с метрической резьбой 94, головкой 95 ввинчен в накладку 85 и стопорится фиксатором 96 резьбовых соединений HARDLOCK www.zavod-rekom.ru (см. фиг. 11 сечение Е-Е на фиг. 9).
Встречные деформации парных пьезостолбов, парных распорок и одиночного стержня равных размеров по длине и равных ТКЛР материалов пьезокерамики: 1,5*10-6 K-1 [1], с. 264, пьезопассивных конструкционных материалов распорок, например, LI-900, LI-2200 теплозащитные плиты из волокнистой керамики, ТКЛР которой составляет 3,2*10-7K-1 инвара (5⋅10-7…2⋅10-6)K-1 (Справочник конструктора: Справочно-методическое пособие / под редакцией И.И. Матюшева. СПб: Политехника. (2006, 1027 с.), таблица 4.4.20, с. 787, включая и одиночный стержень 74, который выполнен составным могут быть выровнены и не быть дестабилизаторами натяга при работе устройства.
НА фиг. 10, сечение Ж-Ж на фиг. 9, изображен узел крепления одиночного ПЭП посредством шпильки 97 с метрической резьбой, головкой 98 и накладки 86 к неподвижным основаниям 3, 8 и его фиксации фиксаторам 96 резьбовых соединений HARDLOCK www.zavod-rekom.ru.
На фиг. 12 изображен вариант единичного ПЭП с тремя парами распорок из пьезопассивного конструкционного материала, тремя парами стержней 82 из пьезоактивных дисков, склеенных клеем ДМ5-65 и одиночными 74 или 101, составленного из трех частей из пьезопассивных материалов с различными ТКЛР и концами стержня из металлического конструкционного материала, одного конца с метрической резьбой, головкой 95, ввернутого в накладку 85 и зафиксированного фиксатором 96 резьбовых соединений HARDLOCK, и вторым нижним концом стержней 74 или 101 с углублением на торце со сферой 71, или без углубления с плоским торцом, см. фиг. 9, установленными в отверстие втулки 93, запрессованной в деталь поз. 90.
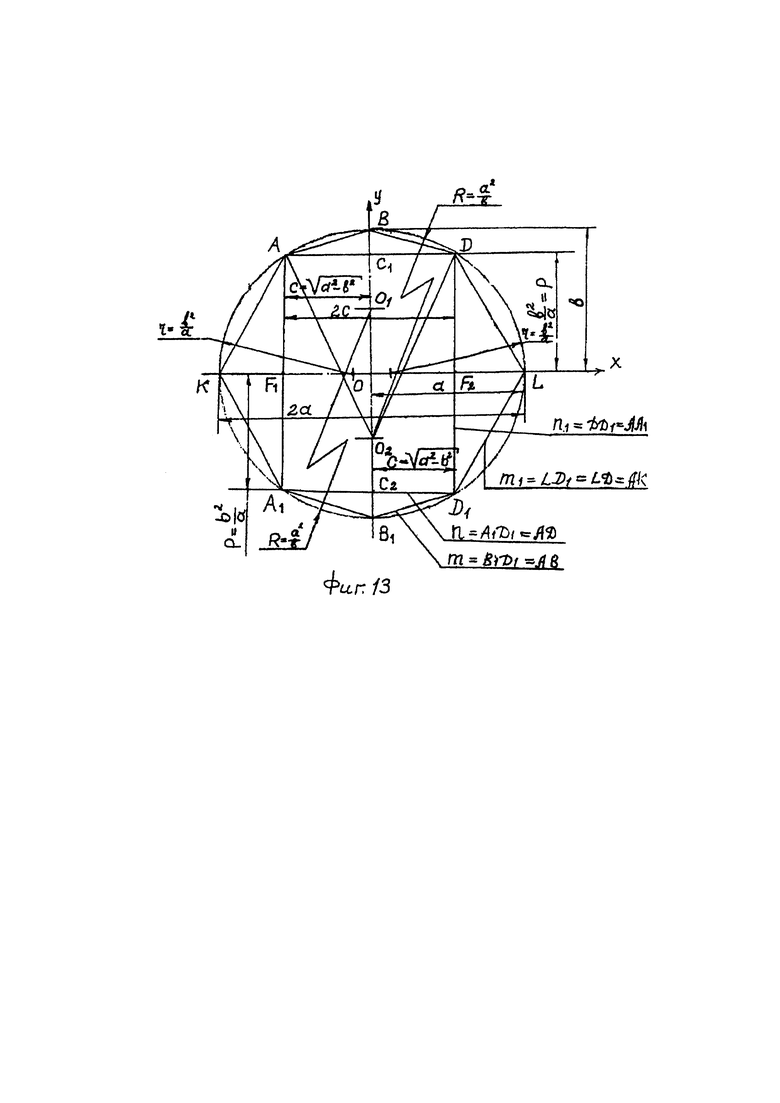
На фиг. 13 изображена расчетная схема контуров эллиптических цилиндров, наружных внутренних кулачков и генератора волн волнового редуктора
а - большая их полуось эллипсов,
b - малая их полуось эллипсов,
 - фокальный параметр эллипсов кулачков и генератора волн волнового редуктора, см. ИН Бронштейн, КА Семендяев. Справочник по математике ГИТ-ТЛ, М. 1953, с. 206;
- фокальный параметр эллипсов кулачков и генератора волн волнового редуктора, см. ИН Бронштейн, КА Семендяев. Справочник по математике ГИТ-ТЛ, М. 1953, с. 206;
2С - фокусное расстояние эллипсов;
F1, F2 - фокусы эллипсов; К, L, В, B1 - вершины;
О - центры; r - радиус описанной окружности ΔDD1L; R - радиус описанной окружности ΔABD.
Функциональная целесообразность формы в виде эллиптических цилиндров рабочих поверхностей кулачков, генераторов волн не сочетается с технологичностью получения этих поверхностей на станках с ЧПУ и решается задача аналитического определения радиусов дуг окружностей путем аппроксимации этой формы поверхностей, предпосылкой к которой является наличие кругового интерполятора в станках с ЧПУ и общих точек на контурах эллипсов и описанных окружностей.
Поэтому следует руководствоваться теоремой:
а) около любого треугольника можно описать окружность или через три точки можно провести окружность и притом только одну (см. Геометрия для общеобразовательных организаций М. Просвещение. 2015, 383 с.);
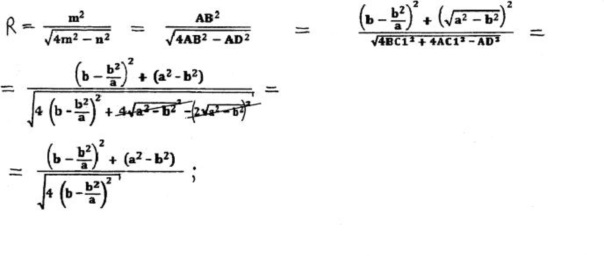
б) радиус описанной окружности равен отношению произведения длин трех сторон треугольника к его учетверенной площади; в случае б) это правило выглядит так:
r =DL2*DD1/4SΔDLD1; R=AB2*AD/4SΔABD;
в) если две окружности имеют общую точку на линии их центров, то они касаются и значит, сопрягаются изнутри;
г) и обратная в): если две окружности касаются, то точка касания лежит на линии центров (см. Геометрия. Учебник для общеобразовательных организаций. М.: Просвещение, 2015); А.П. Киселев, Геометрия. Учебник. Учпедгиз, 1961:

Обозначая  и a2-b2=(a+b)(a-b)=G,
и a2-b2=(a+b)(a-b)=G,
получим
 или
или
где I - квадрат разности длин малой полуоси «b» и фокального параметра «р» эллипса кулачков и генератора волн деформации волнового редуктора;
G - произведение суммы и разности длин большой полуоси «а» и малой полуоси «b» эллипсов кулачков или разность квадратов длин большой полуоси «а» и малой полуоси «b» эллипса кулачков и генератора волн деформации волнового редуктора.
Если а=50 и b=49, что характерно для данного примера

где r для равнобедренного ΔDLD1 с боковой стороной m1=D1L и основанием его n1=DD1.
р - фокальные параметры эллиптических цилиндров на кулачке и генераторе волн. Из приведенного решения задачи, см. с. 480 «Элементарная математика» В.В. Зайцев, В.В. Рыков, М.И. Сканави, Издательство «Наука», М. 1976, по определению радиуса описанной окружности R равнобедренного треугольника ABD с боковой стороной m=АВ (см. фиг. 13), основанием его n=AD, при а=50, b=49 описанной окружности R равнобедренного треугольника ABD с боковой стороной m=АВ (см. фиг. 13), основанием его n=AD
Обозначая  и a2-b2=(a+b)(a-b)=G
и a2-b2=(a+b)(a-b)=G
получим 
где I - квадрат разности длин малой полуоси «b» и фокального параметра «р» эллипса кулачка;
G - произведение суммы и разности длин большой полуоси «а» и малой полуоси «b» эллипса кулачка или разность квадратов длин большой полуоси «а» и малой эллипса «b» кулачка.
Введение в устройство двуплечего рычага уменьшает существенно его габариты в радиальном направлении.
На фиг. 15 показано смещение оси регулирующего устройства натяга в виде системы из двух передач винт-гайка относительно вертикальных осей деталей 16 и 74 для упрощения настройки.
На фиг. 16 показан контакт детали 74 по площади с промежуточным телом, выполненным в виде шарикового радиального подшипника 16 со сферической наружной поверхностью наружного кольца ТУ ВНИИПП. 016-03.
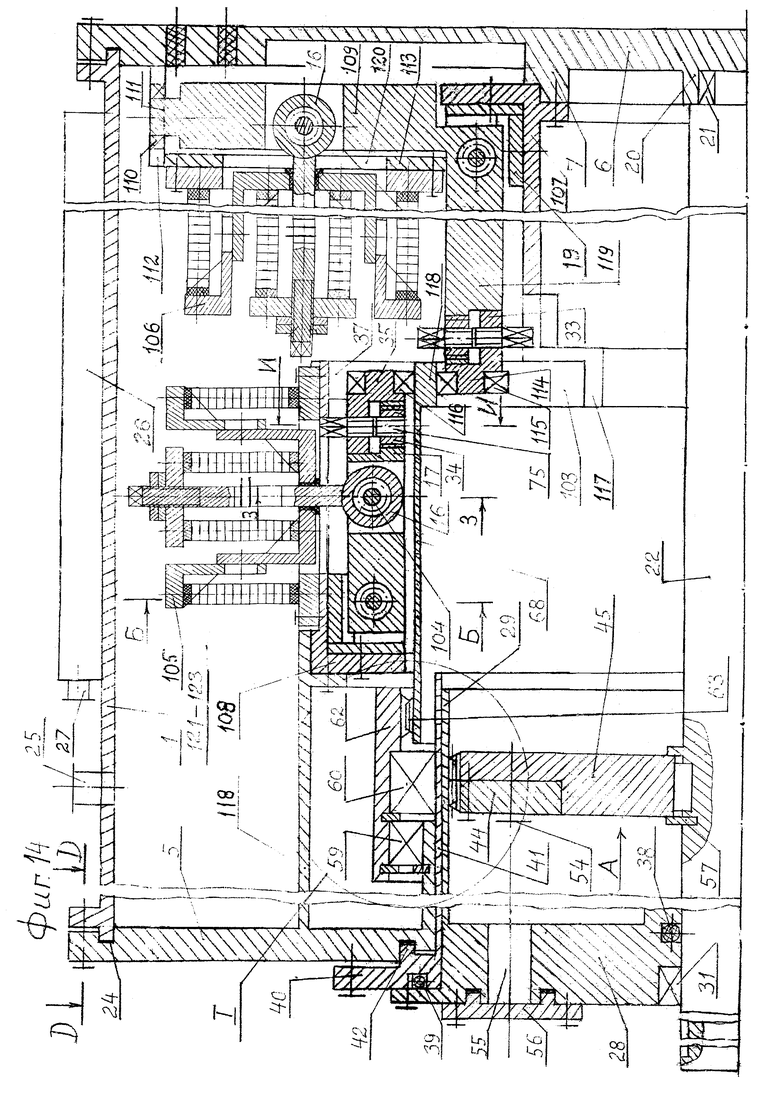
На фиг. 14, 12, 9 введены пьезоэлектрические диски 121, пластинчатые электроды 122 и диэлектрические диски 123.
На фиг. 14 изображено в сборе устройство системы биПЭП из двух блоков, одиночные ПЭП 105, 106 которые, расположены между собой перпендикулярно, в одной плоскости, установлены на неподвижных основаниях 107, 108, двуплечий рычаг 109 контактирует одним плечом с одиночным ПЭП 106 посредством промежуточных тел 16, выполненных в виде шариковых радиальных подшипников со сферической наружной поверхностью наружного кольца ТУ ВНИИПП. 016-03, фиксирует свое положение в окружном направлении посредством подшипника 110 на конце 111 плеча рычага 109, установленного в арке 112 кольцевого стакана 113 и концом 114 другого плеча, развернутого на 90° к первому плечу, контактирует с эллиптическим внутренним цилиндром посредством сферического подшипника 115.
Одноплечий рычаг 17 контактирует с одиночным ПЭП 105 посредством промежуточных тел 16, выполненных в виде шариковых радиальных подшипников со сферической наружной поверхностью наружного кольца ТУ ВНИИПП. 016-03, фиксирует свое положение в окружном направлении посредством сферического подшипника 116 на конце 35 рычага 17, установленного в арке 117 кольцевого выступа крышки 5 и контактирует с эллиптическим наружным цилиндром кулачка 118.
Плечи 119 и 109 усилены уголками жесткости 120. Центральный стержень 74 одиночных ПЭП 105, 106 выполнен сигнальным: снабжен установленными в средней части стержня, соосно с ним, пьезоэлектрическими дисками 121, пластинчатыми электродами 122 и диэлектрическими дисками 123 для выработки электрического сигнала.

Изобретение относится к производству изделий, в которых необходимо регулирование скорости цифровой системой управления при постоянном вращающем моменте. Устройство для получения вращательного движения включает корпус, крышку, выходной вал, установленный в опоре крышки, пьезопреобразователь, установленный на крышке, гибкий элемент, выполненный в виде оболочки с кулачком, контактирующим, по крайней мере, с одним подшипником. Устройство снабжено двумя крышками и двумя эллиптическими цилиндрами, выполненными на кулачке, наружным и внутренним, преимущественно с равными разностями полуосей эллиптических цилиндров, выполненным заодно с оболочкой гибкого элемента, сопряженного зубчатым соединением, например, волновым, с эллиптическим наружным генератором и гибким подшипником волнового редуктора. Устройство оснащено бипьезоэлектрическим преобразователем, составленным из четного числа одиночных пьезопреобразователей, контактирующих упруго с эллиптическими цилиндрами кулачка, наружным и внутренним, посредством промежуточных тел, сферических подшипников, дифференциальных винтовых механизмов, т.е. регулирующих натяг устройств, установленных на одноплечих и двуплечих рычагах, установленных в опорах на неподвижных основаниях, прикрепленных к кольцевым выступам крышек, выполненных по крайней мере в виде одной пары стержневых пьезопреобразователей из пьезоактивных дисков равных поперечных сечений, одной пары двухчастевых распорок, соединенных лазерной сваркой, в том числе круговым швом. Одна часть распорки выполнена в виде балки, имеющей прямоугольное основание со стойками корытного переменного сечения по высоте, снабженной на одной стойке сквозным отверстием. Другая часть распорки выполнена в виде балки, имеющей основание со сквозным отверстием в балке коробчатого сечения со стойками, снабженными уголками, и одиночного с головкой стержня или составной трехчастевой шпильки и метрической резьбой, ввинченных в накладку и установленных с зазором во втулку, запрессованную в основание балки коробчатого сечения, и вторым концом, выполненным со сферическим углублением на торце. Парные пьезостержни, парные распорки, соединенные последовательно жестко торцами, и одиночный стержень с метрической резьбой, застопоренный фиксатором резьбовых соединений, выполнены равных размеров по длине, с равными встречными температурными деформациями парных пьезостержней, распорок и одиночного стержня из конструкционного материала или трехчастевого стержня или шпильки, выполненных из материалов с разными температурными коэффициентами линейного расширения. Изобретение направлено на обеспечение регулирования скорости цифровой системой управления при постоянном вращающем моменте. 6 з.п. ф-лы, 16 ил.
1. Устройство для получения вращательного движения, включающее корпус, крышку, выходной вал, установленный в опоре крышки, пьезопреобразователь (ПЭП), установленный на крышке, гибкий элемент, выполненный в виде оболочки с кулачком, контактирующим, по крайней мере, с одним подшипником, отличающееся тем, что снабжено двумя крышками и двумя эллиптическими цилиндрами, выполненными на кулачке, наружным и внутренним, преимущественно с равными разностями полуосей эллиптических цилиндров а-b, выполненным заодно с оболочкой гибкого элемента, сопряженного зубчатым соединением, например, волновым, с эллиптическим наружным генератором и гибким подшипником волнового редуктора, при этом оно оснащено бипьезоэлектрическим преобразователем (биПЭП), составленным из четного числа одиночных пьезопреобразователей, контактирующих упруго с эллиптическими цилиндрами кулачка, наружным и внутренним, посредством промежуточных тел, сферических подшипников, дифференциальных винтовых механизмов, т.е. регулирующих натяг устройств, установленных на одноплечих и двуплечих рычагах, установленных в опорах на неподвижных основаниях, прикрепленных к кольцевым выступам крышек, выполненных по крайней мере в виде одной пары стержневых пьезопреобразователей из пьезоактивных дисков равных поперечных сечений, одной пары двухчастевых распорок, соединенных лазерной сваркой, в том числе круговым швом, одна часть распорки выполнена в виде балки, имеющей прямоугольное основание со стойками корытного переменного сечения по высоте, снабженной на одной стойке сквозным отверстием, и другая часть распорки выполнена в виде балки, имеющей основание со сквозным отверстием в балке коробчатого сечения со стойками, снабженными уголками, и одиночного с головкой стержня или составной трехчастевой шпильки и метрической резьбой, ввинченных в накладку и установленных с зазором во втулку, запрессованную в основание балки коробчатого сечения, и вторым концом, выполненным со сферическим углублением на торце, причем парные пьезостержни, парные распорки соединены последовательно жестко торцами, и одиночный стержень с метрической резьбой, застопоренный фиксатором резьбовых соединений, выполнены равных размеров по длине, с равными встречными температурными деформациями парных пьезостержней, распорок и одиночного стержня из конструкционного материала или трехчастевого стержня или шпильки, выполненных из материалов с разными температурными коэффициентами линейного расширения.
2. Устройство по п. 1, отличающееся тем, что каждый одноплечий рычаг и каждый двуплечий рычаг снабжен дифференциальным винтовым механизмом, т.е. регулирующим устройством натяга в контакте подшипника с эллиптическими цилиндрами, наружным и внутренним, кулачка, выполненным в виде системы из двух передач винт-гайка с резьбами одинакового или разных направлений винтовых линий, гайка одной передачи представляет собой ползун-упор, установленный с возможностью перемещения по вертикальной плоскости рычага в направлении осей биПЭП, а гайка другой передачи выполнена в виде ввернутого в рычаг и закрепленного ввертыша; при этом на шейках концов каждого одноплечего рычага и каждого двуплечего рычага установлены, преимущественно, сферические шарикоподшипники, перемещающиеся в радиальных, арочных проемах неподвижных оснований.
3. Устройство по п. 1, отличающееся тем, что жесткое зубчатое колесо ускоряющегося волнового редуктора выполнено сдвоенным из двух жестких колес, основного, установленного на выходном валу, и второго жесткого вставного колеса, установленного в расточке основного с возможностью поворота в окружном направлении на 180о и выборки мертвого хода, т.е. получения беззазорной волновой герметичной передачи, при этом сдвоенное зубчатое колесо снабжено пружинами сжатия, регулирующими усилия пружин винтами и винтами-фиксаторами относительного положения основного и вставного жестких зубчатых колес.
4. Устройство по п. 1, отличающееся тем, что подшипник наружного генератора выполнен с тонкостенными внутренним и наружным кольцами δ=0,02D, сепараторами и шариками и/или подшипник выполнен с тонкостенными кольцами δ=0,02D, без сепараторов, с шариками двух разных диаметров, поочередно расположенных в кольцевых канавках подшипника, при этом гибкий подшипник установлен с натягом во внутреннюю эллиптическую цилиндрическую расточку наружного генератора и на наружный диаметр гибкой подкладной оболочки с натягом, наружное кольцо гибкого подшипника зажато между корпусом наружного генератора и фланцем ограничителя осевого перемещения, а внутреннее кольцо гибкого подшипника установлено с кольцевыми зазорами с выточкой в корпусе генератора и внутренней выточкой во фланце, корпус генератора и фланец снабжены кольцевыми выступами и установлены с радиальными зазорами и кольцами подшипника и осевыми зазорами в пределах 0,05…0,01 мм между торцами выступов и шариками подшипника, где δ - толщина кольца; D - наружный диаметр кольца подшипника.
5. Устройство по п. 1, отличающееся тем, что эллиптические цилиндры, наружный и внутренний, расположенные на осях эллипсов параллельно, больших и малых, и преимущественно с равной разностью полуосей а-b, выполняются двумя парами дуг окружностей, одной парой дуг окружностей, одной парой дуг окружностей с центрами, расположенными на больших осях 2а по обе стороны от центра эллипса, радиусами  от вершин эллипса, при этом дуги окружности радиусов "r" сопрягают дугами окружностей, описываемых из центров кривизны, расположенных на малой оси 2b эллиптического контура кулачка радиусами
от вершин эллипса, при этом дуги окружности радиусов "r" сопрягают дугами окружностей, описываемых из центров кривизны, расположенных на малой оси 2b эллиптического контура кулачка радиусами
где а и b – большая и малая полуоси эллипсов соответственно;
I - квадрат разности длин малой полуоси "b" и фокального параметра "р" эллипса кулачка;
G - произведение суммы и разности длин большой полуоси "а" и малой полуоси "b" или разность квадратов длин большой полуоси "а" и малой полуоси "b" эллипса кулачка.
6. Устройство по п. 1, отличающееся тем, что одиночные ПЭП в парах блоков системы биПЭП расположены между собой перпендикулярно, в одной плоскости, установлены на неподвижных основаниях, прикрепленных к крышкам, снабжены двуплечим и одноплечим рычагами, установленными в опорах, с выполненными на концах рычагов цилиндрическими шейками со сферическими подшипниками на них, которые установлены с возможностью перемещения в радиальном направлении в арках неподвижных оснований и контактирования с наружным и внутренним эллиптическими цилиндрами кулачка.
7. Устройство по п. 1, отличающееся тем, что центральный стержень одиночных ПЭП выполнен сигнальным: снабжен установленными в средней части стержня, соосно с ним, пьезоэлектрическими дисками, пластинчатыми электродами и диэлектрическими дисками.
| Устройство для получения вращательного движения | 1983 |
|
SU1093842A2 |
| Волновой вибродвигатель | 1976 |
|
SU595813A1 |
| "Устройство для получения вращательногодВижЕНия | 1979 |
|
SU842307A2 |
| JPS6339478 A, 19.02.1988 | |||
| US 6314835 B1, 13.11.2001. | |||

