Изобретение относится к электротехнике, а именно к системам управления стартер-генераторными устройствами транспортных средств с двигателями внутреннего сгорания.
Известно устройство (Вершигора В.А., Игнатов А.П. и др. "Автомобиль ВАЗ-2108. - М.: ДОСААФ, 1986, стр.194), в котором для поддержания в заряженном состоянии бортовой аккумуляторной батареи автомобиля используется синхронная машина с электромагнитным возбуждением, а для запуска двигателя внутреннего сгорания (ДВС) используется машина постоянного тока со смешанным возбуждением (там же, стр.204).
Недостатком этого устройства является наличие двух электрических машин, причем разного типа.
Известно так же устройство (патент США №4883973, кл. F 02 N 11/04, 1989 г. и европейский патент №0357183 В1, кл. F 02 N 11/04, 1992 г.), в котором асинхронная машина используется и для запуска ДВС и для заряда бортовой аккумуляторной батареи, т.е. она выполняет функции стартера и генератора.
Недостатком этого устройства является отсутствие блока оптимизации режимов работы асинхронной машины в условиях ограничения по току и напряжению питания для оптимального использования габаритной мощности асинхронной машины и установленной мощности силового преобразователя.
Наиболее близким техническим решением является способ (патент России №2188964, кл. F 02 N 11/04, опублик. 10.09.2002) и устройство (патент России №2200871, кл. F 02 N 11/04, опублик. 20.03.2003), в котором синхронная машина с электромагнитным возбуждением работает в частотно-токовой системе автоматического регулирования во всем диапазоне изменения нагрузок и регулирования скорости с обеспечением выполнения критерия минимума статических потерь в машине.
Недостатком этого устройства является его пониженная надежность и повышенная стоимость за счет использования бесконтактной синхронной машины с электромагнитным возбуждением и наличия формирователя гармонических функций, механически связанного с ротором синхронной машины.
Решение технической задачи направлено на повышение надежности и уменьшение стоимости устройства за счет использования асинхронной машины, как самой простой в изготовлении и самой надежной в эксплуатации и за счет исключения из состава устройства формирователя гармонических функций, механически связанного с ротором машины.
Для решения поставленной технической задачи измеряют текущее значение скорости, сравнивают его с заданным уровнем для перехода в стартерный или генераторный режим работы, вводят новую переменную, коэффициент связи, определяют ее значение, обеспечивающее минимальные потери в меди машины при фиксированном моменте, и формируют заданное значение продольной составляющей вектора тока статора с учетом этой величины коэффициента связи, при этом заданное значение поперечной составляющей вектора тока статора формируют в стартерном режиме в функции отклонения текущего значения скорости от заданного значения, а в генераторном - в функции отклонения текущего значения напряжения бортовой аккумуляторной батареи от заданного значения, причем, если в любом из режимов работы текущее значение модуля вектора напряжения статора достигнет граничного значения, то монотонно уменьшают коэффициент связи в функции поддержания текущего значения модуля вектора напряжения статора на граничном уровне, если же текущее значение модуля вектора тока статора достигнет граничного значения, то монотонно увеличивают коэффициент связи в функции поддержания текущего значения модуля вектора тока статора на граничном уровне, в случае же, когда текущее значение развиваемой машиной мощности достигает предельно допустимую мощность бортовой аккумуляторной батареи, то монотонно уменьшают заданное значение поперечной составляющей вектора тока статора в функции поддержания развиваемой машиной мощности на предельно допустимом уровне для бортовой аккумуляторной батареи, при этом переход в стартерный режим производят при наличии сигнала датчика нажатого состояния педали акселератора автомобиля и низкого значения скорости, а переход в генераторный режим производят при высоком значении скорости и наличии сигнала датчика нажатого состояния педали акселератора автомобиля, при этом заданные значения токов формируют в обмотках машины с помощью системы частотно-токового управления, задавая их во вращающейся ортогональной системе координат, продольная ось которой направлена по вектору потокосцепления ротора, а величина коэффициента связи равна отношению продольной составляющей вектора тока статора к поперечной составляющей вектора тока статора, в связи с чем заданное значение продольной составляющей формируют в виде произведения коэффициента связи на величину заданного значения поперечной составляющей вектора тока статора, а текущее значение абсолютного скольжения формируют обратно пропорционально величине текущего значения коэффициента связи.
Устройство управления стартер-генератором на базе бесконтактной электрической машины переменного тока, реализующее данный способ управления, содержит формирователь гармонических функций, датчик скорости, блок формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, подключенный своими первым и вторым выходами через последовательно включенные блок преобразования координат, силовой преобразователь с частотно-токовой системой управления и датчики фазного тока к фазным обмоткам электрической машины, первый блок сравнения, первый не инвертирующий вход которого подключен к выходу задатчика интенсивности, второй блок сравнения, подключенный первым не инвертирующим входом к уставке напряжения бортовой аккумуляторной батареи, а вторым инвертирующим входом - к датчику напряжения бортовой аккумуляторной батареи, подключенной к соответствующим входам питания силового преобразователя, при этом выходы первого и второго блоков сравнения подключены соответственно к первому и второму входам блока коммутации, выход которого подключен к первому входу блока формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, а второй вход этого блока подключен ко второму инвертирующему входу первого блока сравнения, при этом управляющий вход блока коммутации подключен к выходу логического элемента "И", первый вход которого через первый компаратор подключен ко второму входу блока формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, а второй вход через второй компаратор подключен к датчику нажатого состояния педали акселератора автомобиля, причем выход второго компаратора подключен так же ко входу задатчика интенсивности, при этом электрическая машина является асинхронной с короткозамкнутым ротором, на валу которой установлен датчик скорости, являющийся частотно-импульсным и подключенным своим выходом ко входу формирователя импульсов, выход которого подключен напрямую к первому входу формирователя гармонических функций, а через преобразователь частота-напряжение подключен ко второму входу блока формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, третий выход которого через последовательно соединенные блок выделения модуля и преобразователь напряжение-частота подключен к третьему входу формирователя гармонических функций, а через нуль-орган подключен ко второму входу формирователя гармонических функций, выход которого подключен к цифровому входу блока преобразования координат.
Блок формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям в составе описанного устройства является оригинальным техническим решением, т.к. содержит блоки вычисления мощности, модуля вектора напряжения и тока статора, блок ограничения коэффициента связи, два блока суммирования, три блока сравнения, три пропорциональных регулятора, блок задания постоянных сигналов, блок умножения и блок деления, при этом выход блока вычисления мощности через первый блок сравнения и первый пропорциональный регулятор соединен с первым входом первого блока суммирования, второй вход которого является первым входом блока формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям и подключен к выходу блока коммутации, а его выход, являющийся вторым выходом блока, подключен ко второму входу блока преобразования координат, при этом выход блока вычисления модуля вектора напряжения через последовательно включенные второй блок сравнения и второй пропорциональный регулятор подключен к первому входу второго блока суммирования, второй вход которого подключен к блоку задания постоянного сигнала, третий вход через последовательно включенные третий пропорциональный регулятор и третий блок сравнения подключен к выходу блока вычисления модуля вектора тока статора, а выход второго блока суммирования подключен к первому входу блока ограничения коэффициента связи, второй вход которого является вторым входом блока формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, а выход блока ограничения коэффициента связи подключен к первому входу блока умножения, при этом выходы блока задания постоянных сигналов подключены к соответствующим входам блоков сравнения, а соответствующие входы блока вычисления мощности подключены к выходу блока вычисления модуля вектора напряжения и выходу блока вычисления модуля вектора тока статора, причем входы блока вычисления модуля вектора напряжения подключены к управляющим входам силового преобразователя, а первый вход блока вычисления модуля вектора тока статора подключен к выходу первого блока суммирования, являющимся вторым выходом блока формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, и к первому входу блока умножения, выход которого является первым выходом блока формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям и подключен ко второму входу блока вычисления модуля вектора тока статора и ко второму входу блока деления, первый вход которого подключен к выходу первого блока суммирования, а выход является третьим выходом блока формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям.
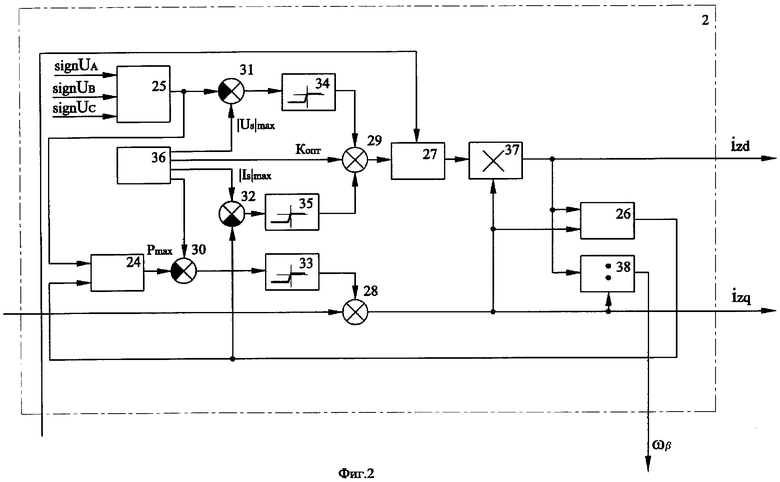
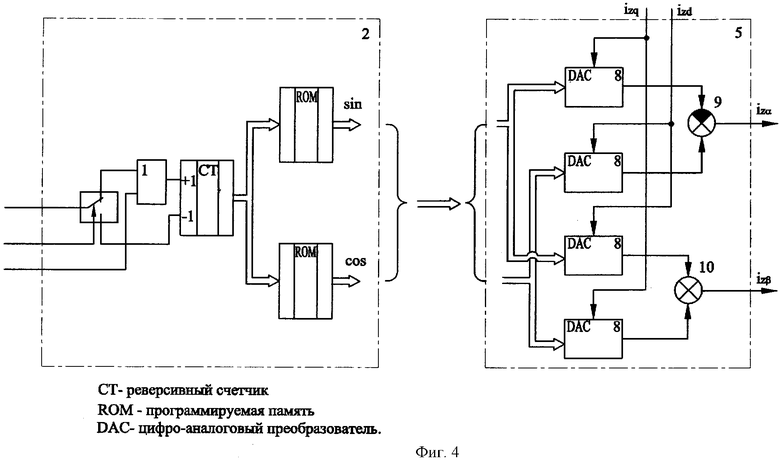
На фиг.1 изображена структурная схема устройства управления стартер-генератором на базе асинхронной машины с короткозамкнутым ротором; на фиг.2 - структурная схема блока формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям; на фиг.3 - предельные механические характеристики в стартерном режиме; на фиг.4 - один из возможных вариантов практической реализации формирователя гармонических функций и блока преобразования координат.
Устройство управления стартер-генератором на базе асинхронной машины 1 с короткозамкнутым ротором содержит формирователь 2 гармонических функций, датчик 3 скорости, блок 4 формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, подключенный своими первым и вторым выходами через последовательно включенные блок 5 преобразования координат, силовой преобразователь 6 с частотно-токовой системой 7 управления и датчики 8 фазного тока к фазным обмоткам электрической машины 1, первый блок 9 сравнения, первый не инвертирующий вход которого подключен к выходу задатчика 10 интенсивности, второй блок 11 сравнения, подключенный первым не инвертирующим входом к уставке 12 напряжения бортовой аккумуляторной батареи, а вторым инвертирующим входом - к датчику 13 напряжения бортовой аккумуляторной батареи, подключенной к соответствующим входам питания силового преобразователя 6, при этом выходы первого 9 и второго 11 блоков сравнения подключены соответственно к первому и второму входам блока 14 коммутации, выход которого подключен к первому входу блока 4 формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, а второй вход этого блока подключен ко второму инвертирующему входу первого блока 9 сравнения, при этом управляющий вход блока 14 коммутации подключен к выходу логического элемента 15 "И", первый вход которого через первый компаратор 16 подключен ко второму входу блока 4 формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, а второй вход через второй компаратор 17 подключен к датчику 18 нажатого состояния педали акселератора автомобиля, причем выход второго компаратора 17, подключен так же ко входу задатчика 10 интенсивности, при этом электрическая машина 1 является асинхронной с короткозамкнутым ротором, на валу которой установлен датчик 3 скорости, являющийся частотно-импульсным и подключенным своим выходом ко входу формирователя 19 импульсов, выход которого подключен напрямую к первому входу формирователя 2 гармонических функций, а через преобразователь 20 частота-напряжение подключен ко второму входу блока 4 формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, третий выход которого через последовательно соединенные блок 21 выделения модуля и преобразователь 22 напряжение-частота подключен к третьему входу формирователя 2 гармонических функций, а через нуль-орган 23 подключен ко второму входу формирователя 2 гармонических функций, выход которого подключен к цифровому входу блока 5 преобразования координат.
Блок 4 формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, подключенный своими первым и вторым выходами соответственно к первому и второму входам блока 5 преобразования координат, содержит блоки вычисления мощности 24, модуля вектора напряжения 25 и тока 26 статора, блок 27 ограничения коэффициента связи, два блока 28 и 29 суммирования, три блока 30, 31 и 32 сравнения, три пропорциональных регулятора 33, 34 и 35, блок 36 задания постоянных сигналов, блок 37 умножения и блок 38 деления, при этом выход блока 24 вычисления мощности через первый блок 30 сравнения и первый пропорциональный регулятор 33 соединен с первым входом первого блока 28 суммирования, второй вход которого является первым входом блока 4 формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям и подключен к выходу блока 14 коммутации, а его выход, являющийся вторым выходом блока 4, подключен ко второму входу блока 5 преобразования координат, при этом выход блока 25 вычисления модуля вектора напряжения через последовательно включенные второй блок 31 сравнения и второй пропорциональный регулятор 34 подключен к первому входу второго блока 29 суммирования, второй вход которого подключен к блоку 36 задания постоянного сигнала, третий вход через последовательно включенные третий пропорциональный регулятор 35 и третий блок 32 сравнения подключен к выходу блока 26 вычисления модуля вектора тока статора, а выход второго блока 29 суммирования подключен к первому входу блока 27 ограничения коэффициента связи, второй вход которого является вторым входом блока 4 формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, а выход блока 27 ограничения коэффициента связи подключен к первому входу блока 37 умножения, при этом выходы блока 36 задания постоянных сигналов подключены к соответствующим входам блоков 30, 31 и 32 сравнения, а соответствующие входы блока 24 вычисления мощности подключены к выходу блока 25 вычисления модуля вектора напряжения и выходу блока 26 вычисления модуля вектора тока статора, причем входы блока 25 вычисления модуля вектора напряжения подключены к управляющим входам силового преобразователя 6, первый вход блока 26 вычисления модуля вектора тока статора подключен к выходу первого блока 28 суммирования, являющимся вторым выходом блока 4 формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, и к первому входу блока умножения 37, выход которого является первым выходом блока 4 формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям и подключен ко второму входу блока 26 вычисления модуля вектора тока статора и ко второму входу блока 38 деления, первый вход которого подключен к выходу первого блока 28 суммирования, а выход является третьим выходом блока 4 формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям.
Работа устройства, реализующего предлагаемый способ управления, осуществляется следующим образом.
При нажатии водителем на педаль акселератора датчик 18 выдает сигнал и компаратор 17 переключается, выдавая единичное напряжение на первый вход логического элемента 15 "И" и на вход задатчика 10 интенсивности. Напряжение на выходе задатчика 10 интенсивности начинает монотонно возрастать, поступая через блок 14 коммутации на первый вход блока 4 формирования заданных значений составляющих вектора тока статора. Выходной сигнал с первого и второго выходов этого блока поступает соответственно на первый и второй аналоговые входы блока 5 преобразования координат. После умножения на гармонические функции углового положения потокосцепления ротора асинхронной машины 1 и соответствующего суммирования они превращаются в заданные значения izα, izβ составляющих вектора тока статора в неподвижной системе координат α, β, ось α которой совпадает с направлением фазы "А". Затем эти сигналы разделяются на заданные значения фазных токов izA, izB, izC и отслеживаются с помощью релейных регуляторов с гистерезисной характеристикой.
Осуществление формирования заданных значений составляющих вектора тока статора по продольной и поперечной осям, основано на том, что в асинхронной машине возможно получение моментов, требуемых по условиям работы, при одновременном выполнении дополнительного критерия оптимизации. Обычно в установившихся режимах критерием оптимизации является критерий минимума потерь, выполнение которого возможно для всего диапазона частоты вращения ротора. Однако не менее важно во время разгона (стартерный режим) или торможения (генераторный режим) развивать максимально возможные значения мощности и момента. Эти режимы достигаются только при максимальных значениях модулей векторов тока статора |IS|max или напряжения |US|max. Поэтому критерием оптимальности в этих случаях должны служить или максимализация мощности в условиях ограничения по напряжению или максимализация момента в условиях ограничения по току. Эти ограничения всегда существуют в реальных системах и обусловлены как предельными возможностями элементов силового преобразователя, так и источника питания.
Выражение для любой из указанных оптимизируемых величин с использованием уравнений обобщенной машины можно записать в виде

где Θ - физическая величина (электромагнитный момент, модуль тока или напряжения), при фиксированном значении которой необходимо найти экстремум оптимизируемой величины (потери, электромагнитный момент или мощность соответственно);
F(K) - функция, определяемая по уравнениям установившегося режима и зависящая от параметров машины, угловой скорости и коэффициента связи К, который представляет собой отношение компонент вектора тока статора во вращающейся системе координат d, q, ось d которой ориентирована по направлению вектора потокосцепления ротора, а ось q в опережающем ее на 90° направлении:
 .
.
Оптимальное значение коэффициента связи, соответствующее работе машины в режиме минимума потерь (К=Копт), в режиме максимализации момента (К=KI) и в режиме максимализации мощности (К=KU) можно определить из условия:
∂Λ/∂К=0.
После этого по вычисленному значению коэффициента связи и по требуемой величине электромагнитного момента можно определить id и iq.
Для вычисления значений коэффициентов связи воспользуемся известными дифференциальными уравнениями асинхронной машины с короткозамкнутым ротором (1), записанными в ортогональной системе координат d, q:
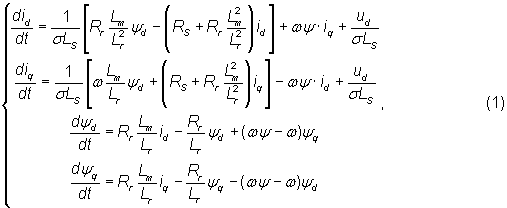
где id, iq, ψd, ψq=0 - координаты векторов IS тока статора и ψr потокосцепления ротора; RS, Rr - активное сопротивление обмоток статора и ротора (приведенного к статору); σ=1-L2 m/LSLr - полный коэффициент рассеяния; LS=Lm+L1, Lr=Lm+L2 - полная индуктивность статора и ротора (L1, L2, Lm - соответственно, индуктивность рассеяния статора, ротора и индуктивность контура намагничивания); ωψ - угловая скорость вектора потокосцепления ротора; ω=pn - угловая скорость ротора, выраженная в электрических радианах (p - число пар полюсов машины, n - угловая скорость ротора в механических радианах); ud, uq - координаты обобщенного вектора Us напряжения машины.
Электромагнитный момент, развиваемый машиной, равен

Представляем компоненту id в виде 
Тогда из двух последних уравнений системы (1) можно получить, что в статическом режиме работы

а коэффициент связи
 или
или 
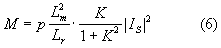
Используя (2), (3), (4), (5), а также уравнения, выражающие компоненты векторов токов статора и ротора [1, 2], можно получить выражения для электромагнитного момента М и для потерь Р в меди статора и ротора через параметры машины, модуль вектор тока статора и коэффициент связи К

Чтобы получить аналогичное выражение для мощности W, развиваемой машиной, вначале необходимо выразить средние значения компонент ud, и uq вектора напряжения через параметры машины, коэффициент связи К и развиваемый машиной момент, а затем воспользоваться связью компонент вектора напряжения с его модулем. Из (1) видно, что в статическом режиме работы средние значения компонент векторов напряжения и тока связаны соотношением
Используя (3), (6) и (8), получаем
Из этих соотношений с учетом W=М·n и |US|2=u2 d+u2 q имеем
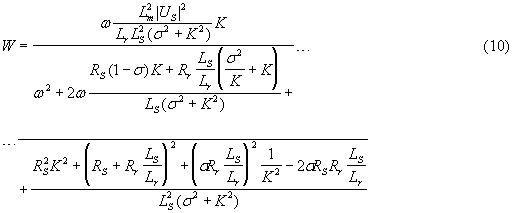
Из уравнений (6) и (7) нетрудно получить соответствующие значения коэффициентов связи
а из уравнения (10) получаем, что величина К=КU задается уравнением четвертой степени К4+ξ1К2+ξ2К+ξ3=0, где
Таким образом, из (13) видно, что величина КU является функцией скорости.
Для вычисления значений К=КUI, соответствующих работе машины в условиях одновременного ограничения модулей векторов статорного тока и напряжения, воспользуемся уравнением (6) при |IS|=|IS|max

Полученное уравнение показывает, что при максимальном значении момента КUI=1, а при моментах, меньших максимального, КUI принимает два значения: одно из них больше единицы, а другое - меньше. Таким образом, при уменьшении момента, с одной стороны, происходит возрастание значения КUI, которое очевидно не должно превышать величины Копт, а, с другой стороны, происходит уменьшение значения КUI, что в свою очередь, может привести к режимам работы машины со скольжениями, превышающими критическое (оба знака перед корнем соответствуют стартерному режиму работы при М>0 и генераторному при М<0. Поэтому очевидно, что величина КUI должна лежать в диапазоне Копт≥KUI≥KU.
Уравнение для предельных механических характеристик двигателя при заданном ограничении модуля вектора напряжения статора (напряжения источника питания) и различных уровнях потерь в меди машины (т.е. при различных значениях коэффициента связи К) можно получить из уравнения (10)

Как и ранее, знак "+" соответствует стартерному режиму работы машины, а "-" генераторному.
На фиг.3 приведено наиболее характерное расположение границ зон работы машины с минимумом потерь, т.е. при К=Копт (кривая 1), с минимумом тока статора, т.е. при К=KI (кривая 2) с максимальной мощностью, т.е. при К=КU (кривая 3) и при одновременном ограничении модулей векторов напряжения и тока статора, т.е. при К=KUI (кривая 4). Отрезок кривой 3 выше точки касания с кривой 4, соответствует работе машины с |US|=|US|max, K=KU и |IS|<|IS|max, т.е. моменты, соответствующие этому отрезку кривой 3, достигаются при токах, меньших |IS|max.
Из фиг.3 видно, что в отношении величины К имеются три зоны.
1) Первая зона, это зона, ограниченная осями n=0, М=0, максимальной скоростью nmax, кривой 1 и моментом М1. Величина М1 определяется из (6) при К=Копт и предельном значении тока вентилей преобразователя, т.е. при |IS|=|IS|max. В этой зоне при заданном |US|max возможно выполнение условия минимума потерь. При этом величина К в этой зоне должна быть постоянна и равна Копт.
2) Вторая зона, это зона, ограниченная нижней ветвью кривой 4 (Нижняя ветвь кривой 4 соответствует значениям КUI, которые получаются из (14) при знаке "+" перед корнем) и вертикальными линиями, соответствующими максимальным значениям моментов в режиме минимума потерь М1 и в режиме минимума тока статора Mmax, т.е. при |IS|=|IS|max. В этой зоне при увеличении заданного момента коэффициент К должен изменяться от К=Копт или К=КUI, до К=KI в функции ограничения тока статора на уровне |IS|max.
3) Третья зона, это зона, ограниченная кривой 1, c максимальной скоростью nmax, кривой 3 и кривой 4 (на фиг.3 заштрихована). В этой зоне, как и во второй зоне, по мере увеличения заданного момента коэффициент К должен изменяться от К=Копт до KUI или KU (в зависимости от текущего значения скорости) в функции ограничения |US| на уровне |US|max, причем, как видно из (7), это соответствует монотонному возрастанию потерь в меди от минимально возможных, при К=Копт до потерь, соответствующих К=KUI или KU.
Следовательно, можно синтезировать такой алгоритм выбора значений К для каждой точки (n, М), чтобы возрастание потерь было минимальным, т.е. чтобы требуемые значения скорости и момента достигались бы при максимально возможных значениях коэффициента связи К, больших или равных KI, KU или КUI (в зависимости от n), но не превышающие Копт.
Нетрудно видеть, что необходимость уменьшения величины К обусловлена только ограниченностью напряжения источника питания или коммутационными свойствами силового преобразователя. Поэтому в отношении величины коэффициента связи К можно выделить следующие режимы работы.
Если требуемая величина электромагнитного момента М и текущее значение частоты вращения ротора таковы, что достигаются при |IS|<|IS|max и |US|<|US|max, то машина может работать в режиме минимальных потерь, т.е. К должен быть равен Копт.
Если М и n таковы, что достигаются только при |IS|<|IS|max, |US|=|US|max, и К≠Копт, то величина К должна выбираться из диапазона Копт÷KU в функции поддержания напряжения на уровне |US|=|US|max.
Если М и n таковы, что достигаются только при |IS|=|IS|max, |US|<|US|max и К≠Копт, то величина К должна выбираться из диапазона Копт÷KI в функции ограничения тока на уровне |IS|=|IS|max.
Если М и n таковы, что достигаются только при |IS|=|IS|max, |US|=|US|max и К≠Копт, то величина К=КUI должна вычисляться из уравнения для электромагнитного момента электродвигателя при указанных ограничениях:
При этом согласно зависимости (1) потери во втором и третьем режимах для промежуточных значений К, отличных от КI или КU, будут больше минимальных (т.е. соответствующих К=Копт), но меньше, чем при К=КI или К=КU. Следовательно, при предлагаемом способе управления осуществляется реализация принципа формирования режима работы асинхронной машины по критерию безусловного минимума энергетических потерь с автоматическим переходом к условному минимуму потерь при ограничениях тока и напряжения.
Таким образом, при учете влияния ограничения тока ключевых элементов силового преобразователя необходимо уменьшать значение коэффициента связи К, начиная от значения Копт до тех пор, пока ток в статорных обмотках не уменьшится до допустимых значений. Эти функции осуществляются третьим блоком 32 сравнения, вторым блоком 29 суммирования и третьим пропорциональным регулятором 35, верхний уровень выходного сигнала которого равен нулю (фиг.2). Аналогичным образом следует поступать и при учете ограничения напряжения. Эти функции осуществляются вторым блоком 31 сравнения, вторым блоком 29 суммирования и вторым пропорциональным регулятором 34, верхний уровень выходного сигнала которого равен нулю. Блок 27 ограничения коэффициента связи имеет коэффициент передачи, равный единице. Он обеспечивает ограничение минимальной величины своего выходного сигнала (т.е. величины коэффициента связи К) в функции скорости на уровне, соответствующем КU или KUI. В то же время может оказаться, что предельная мощность асинхронной машины с учетом ограничений |IS| и |US|, превышает допустимое значение мощности бортовой аккумуляторной батареи. Это ограничение не должно вызывать изменения величины коэффициента связи К. Поэтому ограничение мощности, потребляемой от бортовой аккумуляторной батареи, осуществляется за счет уменьшения заданного значения составляющей iq, т.е. за счет уменьшения развиваемого машиной момента. Эти функции осуществляются первым блоком 28 суммирования, первым пропорциональным регулятором 33, первым блоком 30 сравнения и блоком 24 вычисления входной мощности, на входы которого поступают сигналы, пропорциональные току и напряжению бортовой аккумуляторной батареи (фиг.2).
Таким образом, предлагаемый способ управления стартер-генератором позволяет предельно использовать асинхронную машину с короткозамкнутым ротором как в стартерном, так и в генераторном режимах во всем диапазоне возможных скоростей и нагрузок с учетом реальных ограничений по току и напряжению. Существенно, что требуемые значения скоростей и моментов достигаются автоматически при минимально возможных в данной точке потерях в меди машины. Наибольший эффект дает использование предлагаемого изобретения там, где первостепенное значение имеют энергетические и массогабаритные показатели. Характерным примером этого являются стартер-генераторные устройства транспортных средств с двигателями внутреннего сгорания.
ЛИТЕРАТУРА
[1]. Ковач К.П., Рац И. Переходные процессы в машинах переменного тока. - М.: Госэнергоиздат, 1963. - 744 с.
[2]. Сандлер А.С., Сарбатов Р.С. Автоматическое частотное управление асинхронными двигателями. - М.: Энергия, 1974. - 328 с.

Предложены устройство управления стартер-генератором и блок формирования заданных значений составляющих вектора тока статора для стартер-генератора. На основе асинхронной машины с короткозамкнутым ротором создано устройство, позволяющее предельно использовать габаритную мощность электрической машины и установленную мощность ключевых элементов силового преобразователя, которое основано на введении новой переменной. С помощью блока формирования формируются заданные значения составляющих вектора тока статора в частотно-токовой системе управления. Устройство обеспечивает работу стартер-генератора с минимальными потерями как в стартерном, так и в генераторном режимах. 2 н.п. ф-лы, 4 ил.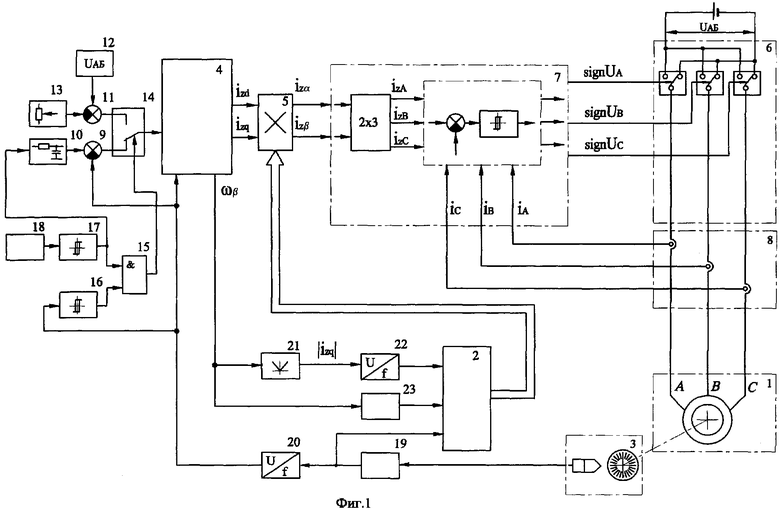
| УСТРОЙСТВО УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРОМ С БЛОКОМ ФОРМИРОВАНИЯ ЗАДАННЫХ ЗНАЧЕНИЙ ТОКА ВОЗБУЖДЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА ТОКА СТАТОРА ПО ПРОДОЛЬНОЙ И ПОПЕРЕЧНОЙ ОСЯМ | 2000 |
|
RU2200871C2 |
| US 4883973, 28.11.1989 | |||
| Прибор для опробования пластов в нефтяных и пазовых скважинах | 1933 |
|
SU35783A1 |

