Изобретение относится к электротехнике и может быть использовано в регулируемом асинхронном электроприводе общепромышленного назначения.
Известны ycтройства для определения координат асинхронного двигателя - компонент вектора потокосцепления ротора, содержащие датчики магнитного потока - датчики Холла, установленные в воздушном зазоре, и датчики фазных токов статора [1].
Недостатком таких устройств является конструктивная сложность. К тому же, величины компонент вектора потокосцепления ротора, определенные с помощью подобного устройства, содержат в себе паразитную составляющую, обусловленную наличием зубцовых пульсаций потока в воздушном зазоре двигателя.
Наиболее близким к предлагаемому по технической сущности является устройство для определения координат асинхронного двигателя в регулируемом электроприводе, содержащее датчики фазных токов статора, подключенные через блок преобразования токов к входам блоков вычисления составляющих векторов тока статора и потокосцепления ротора, а также датчики фазных напряжений, подключенные к блоку преобразования напряжений [2].
К недостатку можно отнести тот факт, что в контурах слежения за синусоидально изменяющимися составляющими вектора тока статора этого устройства используются скользящие режимы, что затрудняет его цифровую реализацию на базе микропроцессоров из-за их ограниченного быстродействия. В таком устройстве имеет место неопределенность оценок составляющих вектора потокосцепления ротора при нулевом значении скорости вращения вала двигателя. Соотношение координат и параметров асинхронного двигателя таково, что внутренние обратные связи в апериодических звеньях блока вычисления составляющих потокосцепления ротора компенсируются. Это эквивалентно вычислению составляющих вектора потокосцепления ротора на выходах интегрирующих звеньев, не охваченных обратными связями. Поэтому прохождение импульсных помех на входах апериодических звеньев в блоке вычисления составляющих вектора потокосцепления ротора в данном устройстве приведет к тому, что в синусоидально изменяющихся оценках этих величин возникнет ошибка в виде постоянной составляющей, не исчезающей после снятия помехи, что говорит о низкой помехоустойчивости.
Целями изобретения являются снижение требований к быстродействию микропроцессора, реализующего математическую структуру устройства, достижение возможности определения координат асинхронного двигателя во всем диапазоне изменения его скорости (включая ее нулевое значение), а также повышение помехоустойчивости.
Указанные цели достигаются за счет того, что в устройство определения координат асинхронного двигателя, содержащее датчики фазных токов, подключенные выходами к входам блока преобразования вектора тока статора, введены два элемента сравнения, два регулятора, блок вычисления модуля вектора тока статора, блок вычисления угла между векторами тока и напряжения статора, блок вычисления угловой скорости вращения вала, блок вычисления модуля вектора потокосцепления ротора, блок вычисления угла между векторами потокосцепления ротора и напряжения статора, два элемента суммирования и блок определения составляющих вектора тока статора. Информация о модуле вектора напряжения статора, его скорости вращения и угле поворота поступает с выходов системы управления силовым преобразователем. Блок преобразования вектора тока статора, определяющий его полярные координаты, выходы системы управления силовым преобразователем, один из суммирующих элементов, элементы сравнения, регуляторы, а также блок вычисления модуля вектора тока статора и блок вычисления угла между векторами тока и напряжения статора соединены между собой таким образом, что образуется замкнутая система регулирования полярных координат вектора тока статора. В замкнутых контурах этой системы регулирования осуществляется слежение за сигналами постоянного тока, а не за синусоидально изменяющимися величинами. В этих условиях достижение высокого качества определения координат может осуществляться без использования скользящих режимов и больших коэффициентов усиления в регуляторах.
Управляющие сигналы, формируемые на выходах регуляторов системы регулирования полярных координат вектора тока статора, используются блоком вычисления угловой скорости вращения вала, который функционирует таким образом, что неопределенностей при ее нулевом значении не возникает.
Блок вычисления угловой скорости вращения вала, блок преобразования вектора тока статора, один из выходов системы управления силовым преобразователем, второй суммирующий элемент, блок определения составляющих тока статора, блок вычисления модуля вектора потокосцепления ротора и блок вычисления угла между векторами потокосцепления ротора и напряжения статора соединены между собой так, что образуется система вычисления полярных координат вектора потокосцепления ротора. Математическая структура этой системы построена таким образом, что интегрирующие звенья, на выходах которых вычисляются полярные координаты вектора потокосцепления ротора, оказываются охваченными постоянно действующими, не компенсируемыми обратными связями, за счет чего снижается чувствительность работы устройства по отношению к действию возмущений в виде помех.
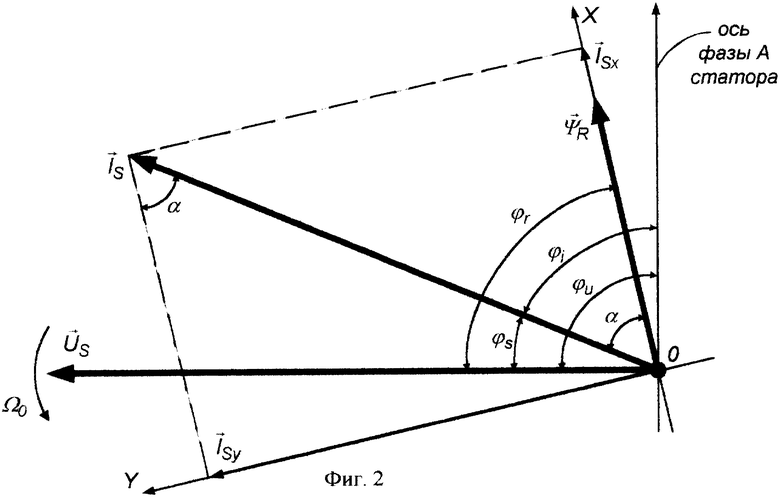
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - векторная диаграмма, поясняющая геометрический смысл переменных, которыми оперирует математическая структура устройства.
Устройство для определения координат асинхронного двигателя в регулируемом электроприводе содержит датчики 1 фазных токов статора (фиг.1), подключенные выходами к входам блока 2 преобразования вектора тока статора, два элемента сравнения 3 и 4, два регулятора 5 и 6, блок 7 вычисления модуля вектора тока статора, блок 8 вычисления угла между векторами тока и напряжения статора, блок 9 вычисления угловой скорости вращения вала, блок 10 вычисления модуля вектора потокосцепления ротора, блок 11 вычисления угла между векторами потокосцепления ротора и напряжения статора, два элемента суммирования 12 и 13, а также блок 14 определения составляющих вектора тока статора. Первый вход блока 14 определения составляющих вектора тока статора объединен с первыми входами элемента 3 сравнения, блока 7 вычисления модуля вектора тока статора, блока 8 вычисления угла между векторами тока и напряжения статора, блока 9 вычисления угловой скорости вращения вала и подключен к первому выходу блока 2 преобразования вектора тока статора, второй выход которого соединен с первым входом элемента 12 суммирования, на второй вход которого поступает сигнал с первого выхода системы управления СУ силовым преобразователем.
Выход элемента 12 суммирования объединен с первыми входами элемента 4 сравнения и элемента 13 суммирования и с вторыми входами блока 8 вычисления угла между векторами тока и напряжения статора и блока 7 вычисления модуля вектора тока статора, выход которого подключен к второму входу элемента 3 сравнения, выход которого соединен с входом регулятора 5, выход которого объединен с третьим входом блока 7 вычисления модуля вектора тока статора и с вторым входом блока 9 вычисления угловой скорости вращения вала. Третий вход блока 9 вычисления угловой скорости вращения вала объединен с третьим входом блока 8 вычисления угла между векторами тока и напряжения статора и с выходом регулятора 6, вход которого подключен к выходу элемента 4 сравнения, второй вход которого соединен с выходом блока 8 вычисления угла между векторами тока и напряжения статора, четвертый вход которого объединен с четвертым входом блока 7 вычисления модуля вектора тока статора и с вторым выходом системы управления СУ силовым преобразователем.
Третий выход системы управления СУ силовым преобразователем подключен к пятому входу блока 8 вычисления угла между векторами тока и напряжения статора и к первому входу блока 11 вычисления угла между векторами потокосцепления ротора и напряжения статора, выход которого подключен к второму входу элемента 13 суммирования, выход которого соединен с вторым входом блока 14 определения составляющих тока статора, первый выход которого объединен с вторым входом блока 11 вычисления угла между векторами потокосцепления ротора и напряжения статора и с четвертым входом блока 9 вычисления угловой скорости вращения вала, выход которого подключен к третьему входу блока 11 вычисления угла между векторами потокосцепления ротора и напряжения статора. Четвертый вход блока 11 вычисления угла между векторами потокосцепления ротора и напряжения статора объединен с пятым входом блока 9 вычисления угловой скорости вращения вала и с выходом блока 10 вычисления модуля вектора потокосцепления ротора, вход которого объединен с вторым выходом блока 14 определения составляющих тока статора и с шестым входом блока 9 вычисления угловой скорости вращения вала.
Устройство работает следующим образом.
Блок 2 преобразования вектора тока статора осуществляет переход от величин токов фаз статора, измеряемых датчиками 1, к полярному представлению вектора тока статора, определяя фактические значения его модуля  и угла его поворота относительно неподвижной системы отсчета ϕi. В качестве начала неподвижной системы отсчета углов используется ось фазы А статора (фиг.2). Вся необходимая для работы устройства информация о векторе напряжения статора поступает с выхода системы управления СУ силовым преобразователем, которая формирует сигналы задания по модулю вектора напряжения статора
и угла его поворота относительно неподвижной системы отсчета ϕi. В качестве начала неподвижной системы отсчета углов используется ось фазы А статора (фиг.2). Вся необходимая для работы устройства информация о векторе напряжения статора поступает с выхода системы управления СУ силовым преобразователем, которая формирует сигналы задания по модулю вектора напряжения статора  по углу его поворота относительно неподвижной системы отсчета ϕu и по угловой скорости его вращения Ω0. Элемент 12 суммирования вычисляет фактическую величину угла ϕs между векторами тока и напряжения статора в соответствии с выражением
по углу его поворота относительно неподвижной системы отсчета ϕu и по угловой скорости его вращения Ω0. Элемент 12 суммирования вычисляет фактическую величину угла ϕs между векторами тока и напряжения статора в соответствии с выражением
ϕs = ϕu-ϕi.
Величины  в качестве задающих сигналов подаются на входы системы регулирования полярных координат вектора тока статора, которая состоит из замкнутых контуров слежения за модулем вектора тока статора и углом между ним и вектором напряжения статора. В состав следящего контура по модулю вектора тока статора входят элемент 3 сравнения фактической и вычисленной величин модуля вектора статора, регулятор 5, а также блок 7 вычисления модуля вектора тока статора. Регулятор 5, исходя из величины ошибки между фактическим
в качестве задающих сигналов подаются на входы системы регулирования полярных координат вектора тока статора, которая состоит из замкнутых контуров слежения за модулем вектора тока статора и углом между ним и вектором напряжения статора. В состав следящего контура по модулю вектора тока статора входят элемент 3 сравнения фактической и вычисленной величин модуля вектора статора, регулятор 5, а также блок 7 вычисления модуля вектора тока статора. Регулятор 5, исходя из величины ошибки между фактическим  и вычисленным
и вычисленным  значениями модуля вектора тока статора, определяемой элементом 3 сравнения, формирует управляющее воздействие С, поступающее на вход блока 7 вычисления модуля вектора тока статора, вычисляющего величину
значениями модуля вектора тока статора, определяемой элементом 3 сравнения, формирует управляющее воздействие С, поступающее на вход блока 7 вычисления модуля вектора тока статора, вычисляющего величину  согласно уравнению
согласно уравнению
где L1 *=(L1L2-Lm 2)/L2 - переходная индуктивность статора;
Lm *=(L1L2-Lm 2)/Lm - переходная индуктивность контура намагничивания;
L1, L2, Lm, R1, R2 - собственная индуктивность статора, собственная приведенная индуктивность ротора, индуктивность контура намагничивания, активное сопротивление статора, приведенное активное сопротивление ротора.
Следящий контур по углу между векторами тока и напряжения статора образуют элемент 4 сравнения фактической и вычисленной величин этого угла, регулятор 6, а также блок 8 вычисления угла между векторами тока и напряжения статора. Регулятор 6, исходя из величины ошибки между фактическим ϕs и вычисленным  значениями угла между векторами тока и напряжения статора, определяемой элементом сравнения 4, формирует управляющее воздействие D, поступающее на вход блока 8 вычисления угла между векторами тока и напряжения статора, вычисляющего величину
значениями угла между векторами тока и напряжения статора, определяемой элементом сравнения 4, формирует управляющее воздействие D, поступающее на вход блока 8 вычисления угла между векторами тока и напряжения статора, вычисляющего величину  согласно уравнению
согласно уравнению
Величины управляющих сигналов С и D на выходах регуляторов контуров слежения за полярными координатами вектора тока статора используются в блоке 9 вычисления угловой скорости вращения вала, который совместно с блоком 10 вычисления модуля вектора потокосцепления ротора, с блоком 11 вычисления угла между вектором потокосцепления ротора и напряжения статора, с элементом 13 суммирования и с блоком 14 определения составляющих тока статора образует систему вычисления полярных координат вектора потокосцепления ротора. Блок 9 определяет оценку скорости  по следующему уравнению:
по следующему уравнению:
где р - число пар полюсов двигателя; вычисленные значения составляющих вектора тока статора в ортогональной системе координат X, Y, ось Х которой ориентирована по вектору потокосцепления ротора (фиг. 2), то есть это оценки потоковой и моментной составляющих тока статора соответственно;
вычисленные значения составляющих вектора тока статора в ортогональной системе координат X, Y, ось Х которой ориентирована по вектору потокосцепления ротора (фиг. 2), то есть это оценки потоковой и моментной составляющих тока статора соответственно; вычисленное значение модуля вектора потокосцепления ротора.
вычисленное значение модуля вектора потокосцепления ротора.
Величина  определяется в блоке 10 вычисления модуля вектора потокосцепления ротора, который функционирует по уравнению
определяется в блоке 10 вычисления модуля вектора потокосцепления ротора, который функционирует по уравнению
Значения оценок потоковой и моментной составляющих тока статора  вычисляются в блоке 14 определения составляющих вектора тока статора по выражениям
вычисляются в блоке 14 определения составляющих вектора тока статора по выражениям
 оценочное значение угла между векторами тока статора и потокосцепления ротора.
оценочное значение угла между векторами тока статора и потокосцепления ротора.
Величина  вычисляется на выходе элемента 13 суммирования, исходя из фактического значения величины угла между векторами тока и напряжения статора ϕs и вычисленного значения угла между векторами потокосцепления ротора и напряжения статора
вычисляется на выходе элемента 13 суммирования, исходя из фактического значения величины угла между векторами тока и напряжения статора ϕs и вычисленного значения угла между векторами потокосцепления ротора и напряжения статора  согласно соотношению
согласно соотношению
Величина  определяется в блоке 11 вычисления угла между векторами потокосцепления ротора и напряжения статора, функционирующем по уравнению
определяется в блоке 11 вычисления угла между векторами потокосцепления ротора и напряжения статора, функционирующем по уравнению
В замкнутой системе регулирования полярных координат вектора тока статора, реализованной в предлагаемом устройстве, осуществляется слежение за знакопостоянными сигналами (сигналами постоянного тока), а не за синусоидально изменяющимися величинами, как это имеет место в известном устройстве. Данное обстоятельство позволяет вычислять координаты асинхронного двигателя без использования в замкнутых следящих контурах скользящих режимов и регуляторов с очень большими коэффициентами усиления. Для получения высокой точности определения таких координат асинхронного двигателя, как потоковая и моментная составляющие тока статора  модуль вектора потокосцепления ротора
модуль вектора потокосцепления ротора  , достаточно применить в замкнутых контурах слежения пропорциональные регуляторы с относительно небольшими коэффициентами усиления. При этом, по сравнению с известным устройством, значительно снижаются требования к быстродействию реализующего микропроцессора.
, достаточно применить в замкнутых контурах слежения пропорциональные регуляторы с относительно небольшими коэффициентами усиления. При этом, по сравнению с известным устройством, значительно снижаются требования к быстродействию реализующего микропроцессора.
Кроме того, структура замкнутой системы регулирования полярных координат вектора тока статора построена так, что в отличие от известного устройства имеется возможность определять переменные асинхронного двигателя во всем диапазоне изменения скорости, вычисляемой в блоке 9, вплоть до ее нулевого значения.
Прохождение импульсных помех на входах блоков, вычисляющих полярные координаты вектора потокосцепления ротора  также как и в известном устройстве, вызывает появление ошибки между фактическими и вычисленными значениями переменных, однако после снятия помех величина этой ошибки с течением времени стремится к нулю под влиянием постоянно действующих обратных связей.
также как и в известном устройстве, вызывает появление ошибки между фактическими и вычисленными значениями переменных, однако после снятия помех величина этой ошибки с течением времени стремится к нулю под влиянием постоянно действующих обратных связей.
Таким образом, введение в устройство, содержащее датчики токов статора, подключенные к блоку преобразования вектора тока статора, двух элементов сравнения, двух регуляторов, блоков вычисления модуля вектора тока статора и угла между ним и вектором напряжения статора, одного суммирующего элемента, с помощью которых образуются замкнутые контуры системы регулирования полярных координат вектора тока статора, а также введение блоков вычисления угловой скорости вращения вала, составляющих тока статора, модуля вектора потокосцепления ротора, угла между ним и вектором напряжения статора и еще одного суммирующего элемента, образующих систему вычисления полярных координат вектора потокосцепления ротора, позволяют обеспечить более высокое качество определения координат асинхронного двигателя по сравнению с известным устройством.
Источники информации
1. Асинхронные электроприводы с векторным управлением. / Рудаков В.В., Столяров И.М., Дартау В.А. - Л.: Энергоатомиздат, Ленингр. отд-ние, 1987, с. 79.
2. А.с. СССР 1399882. Устройство для определения координат асинхронного двигателя в регулируемом электроприводе. / Уткин В.И., Изосимов Д.Б., Архангельский H.Л., Курнышев Б.С., Лебедев С.К., Пикунов В.В., Зезин В.Г., Макаров Е.B. - Опубл. в бюл. 20. - 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2476982C1 |
| Устройство для определения координат асинхронного двигателя регулируемого электропривода | 1986 |
|
SU1403323A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
Изобретение относится к электротехнике и может быть использовано в регулируемом асинхронном электроприводе общепромышленного назначения. Технический результат заключается в повышении качества восстановления координат асинхронного двигателя в статических и динамических режимах работы электропривода. В устройство вводятся система регулирования полярных координат вектора тока статора и взаимодействующая с ней система вычисления полярных координат вектора потокосцепления ротора. В системе регулирования полярных координат вектора тока статора производится отслеживание изменения знакопостоянных величин, в отличие от известного подобного устройства, где организуются следящие контуры за синусоидально меняющимися величинами. При этом удается избежать применения скользящих режимов и очень больших коэффициентов усиления при сохранении высокой точности определения координат асинхронного двигателя, что обусловливает существенное снижение требований к быстродействию реализующего микропроцессора. Система регулирования построена так, что вычисление координат возможно во всем диапазоне изменения скорости, и никаких неопределенностей, в отличие от известного устройства, при ее нулевом значении не возникает. Влияние постоянно действующих обратных связей в системе вычисления полярных координат вектора потокосцепления ротора приводит к снижению чувствительности работы предлагаемого устройства по отношению к действию помех по сравнению с известным устройством. 2 ил.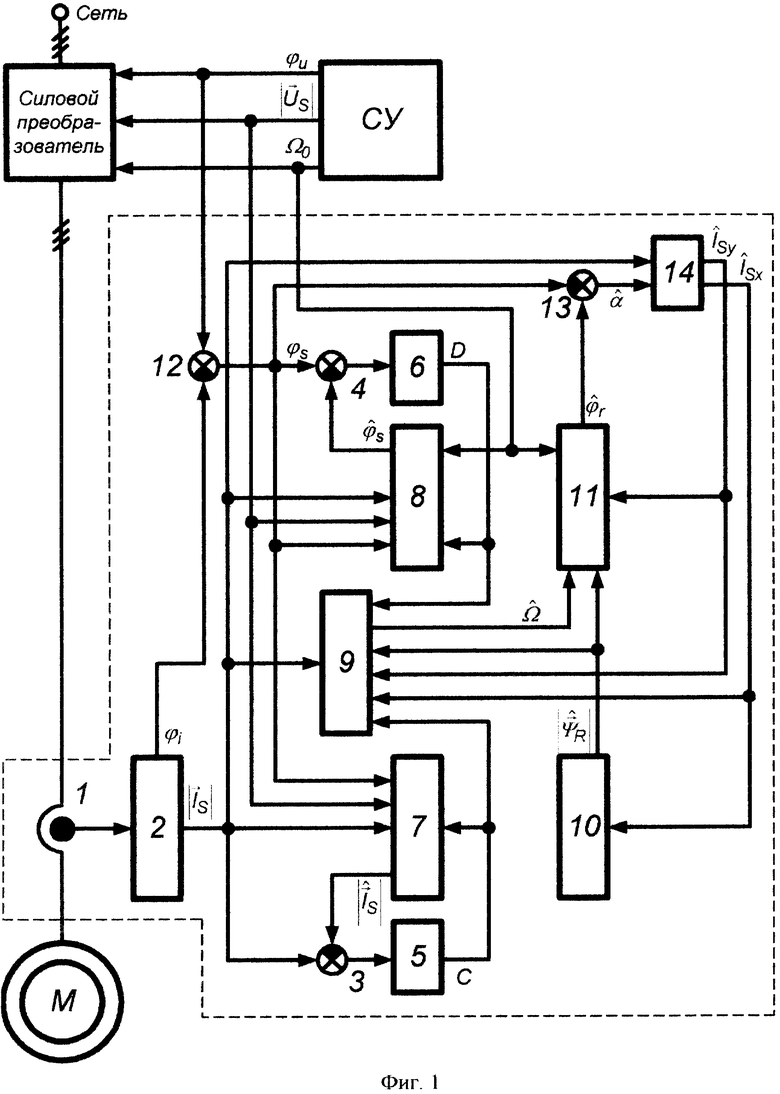
Устройство для определения координат асинхронного двигателя в регулируемом электроприводе, содержащее датчики фазных токов статора, подключенные выходами к входам блока преобразования вектора тока статора, отличающееся тем, что в него введены два элемента сравнения, два регулятора, блок вычисления модуля вектора тока статора, блок вычисления угла между векторами тока и напряжения статора, блок вычисления угловой скорости вращения вала, блок вычисления модуля вектора потокосцепления ротора, блок вычисления угла между векторами потокосцепления ротора и напряжения статора, два элемента суммирования и блок определения составляющих вектора тока статора, первый вход которого объединен с первыми входами одного из элементов сравнения, блока вычисления модуля вектора тока статора, блока вычисления угла между векторами тока и напряжения статора, блока вычисления угловой скорости вращения вала и подключен к первому выходу блока преобразования вектора тока статора, второй выход которого соединен с первым входом одного из элементов суммирования, на второй вход которого поступает сигнал с первого выхода системы управления силовым преобразователем, а выход которого объединен с первыми входами вторых элементов сравнения и суммирования и с вторыми входами блока вычисления угла между векторами тока и напряжения статора и блока вычисления модуля вектора тока статора, выход которого подключен к второму входу первого элемента сравнения, выход которого соединен с входом одного из регуляторов, выход которого объединен с третьим входом блока вычисления модуля вектора тока статора и с вторым входом блока вычисления угловой скорости вращения вала, третий вход которого объединен с третьим входом блока вычисления угла между векторами тока и напряжения статора и с выходом второго регулятора, вход которого подключен к выходу второго элемента сравнения, второй вход которого соединен с выходом блока вычисления угла между векторами тока и напряжения статора, четвертый вход которого объединен с четвертым входом блока вычисления модуля вектора тока статора и с вторым выходом системы управления силовым преобразователем, третий выход которой подключен к пятому входу блока вычисления угла между векторами тока и напряжения статора и к первому входу блока вычисления угла между векторами потокосцепления ротора и напряжения статора, выход которого подключен к второму входу второго элемента суммирования, выход которого соединен с вторым входом блока определения составляющих тока статора, первый выход которого объединен с вторым входом блока вычисления угла между векторами потокосцепления ротора и напряжения статора и четвертым входом блока вычисления угловой скорости вращения вала, выход которого подключен к третьему входу блока вычисления угла между векторами потокосцепления ротора и напряжения статора, четвертый вход которого объединен с пятым входом блока вычисления угловой скорости вращения вала и с выходом блока вычисления модуля вектора потокосцепления ротора, вход которого объединен с вторым выходом блока определения составляющих тока статора и с шестым входом блока вычисления угловой скорости вращения вала.
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1399882A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| Устройство для определения координат асинхронного двигателя | 1985 |
|
SU1283926A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1398061A1 |

