Область техники, к которой относится изобретение
Изобретение относится к области пневмомашиностроения, в частности к механизмам, предназначенным для управления пневматическими приводами со струйным двигателем для запорной и регулирующей арматуры, в том числе шаровыми кранами, при дистанционном и местном управлении.
Предшествующий уровень техники
Существует электропневматический узел управления, содержащий взрывонепроницаемую камеру, электромагниты, пневмоклапаны, систему пневмомагистралей [1, стр.408]. Недостатками этого узла являются отсутствие устройства конечных выключателей, что требует для его работы привлечения дополнительных устройств, невозможность регулирования расхода газа, большие габариты.
Известно электропневматическое управляющее устройство, содержащее взрывонепроницаемую камеру с размещенными в ней герконами и электромагнитами; расположенные вне камеры пневмоклапаны, подвижно связанные с электромагнитами, а также постоянные магниты, жестко связанные с входным валиком устройства (RU 2131065, 27.05.1999). Недостатком данного устройства является низкая точность работы, включения и выключения электромагнитов и пневмоклапанов из-за больших разбросов параметров герконов и постоянных магнитов и их изменения в процессе эксплуатации.
Раскрытие сущности изобретения
Задачей настоящего изобретения является создание устройства управления пневматическими приводами со струйным двигателем, обладающего большей надежностью и точностью работы и обеспечивающего большую надежность и точность работы привода, расширенной областью применения, большим удобством эксплуатации, настройки и регулировки.
Задача решается тем, что электропневматическое управляющее устройство, содержащее взрывонепроницаемую камеру, электромагниты, магнитоуправляемые конечные выключатели, пневмоклапаны, входной валик, снабжено регуляторами расхода рабочего тела, вход которых соединен подвижно с входным валиком, а выход каждого регулятора - с одним из выходных каналов управляющего устройства.
Задача решается также тем, что управляющее устройство снабжено регуляторами давления рабочего тела, причем вход каждого из которых соединен с выходом одного из пневмоклапанов, выход - со входом одного из регуляторов расхода.
Задача решается также тем, что на выходном валике установлены фигурные кулачки.
Задача решается также за счет того, что вход регулятора расхода соединен с входным валиком через рычажную передачу.
Задача решается также за счет того, что рычажная передача снабжена регулируемым упором.
Задача решается также за счет того, что содержит устройство механической блокировки электромагнитов.
Технический результат, достигаемый настоящим изобретением, состоит в следующем.
Большая надежность достигается за счет того, что управляющее устройство снабжено регуляторами расхода рабочего тела, вход которых соединен подвижно с входным валиком, а выход каждого регулятора - с одним из выходных каналов управляющего устройства, а также за счет того, что снабжено регуляторами давления рабочего тела, причем вход каждого из которых соединен с выходом одного из пневмоклапанов, выход - со входом одного из регуляторов расхода; а также за счет того, что содержит устройство механической блокировки электромагнитов.
Расширение области применения достигается за счет того, что устройство снабжено регуляторами расхода рабочего тела, вход которых соединен подвижно с входным валиком, а выход каждого регулятора - с одним из выходных каналов управляющего устройства; а также за счет того, что снабжено регуляторами давления рабочего тела, причем вход каждого из которых соединен с выходом одного из пневмоклапанов, выход - со входом одного из регуляторов расхода; а также за счет того, что на выходном валике установлены фигурные кулачки.
Большее удобство эксплуатации, настройки и регулировки достигается за счет того, что вход регулятора расхода соединен с входным валиком через рычажную передачу; а также за счет того, что рычажная передача снабжена регулируемым упором.
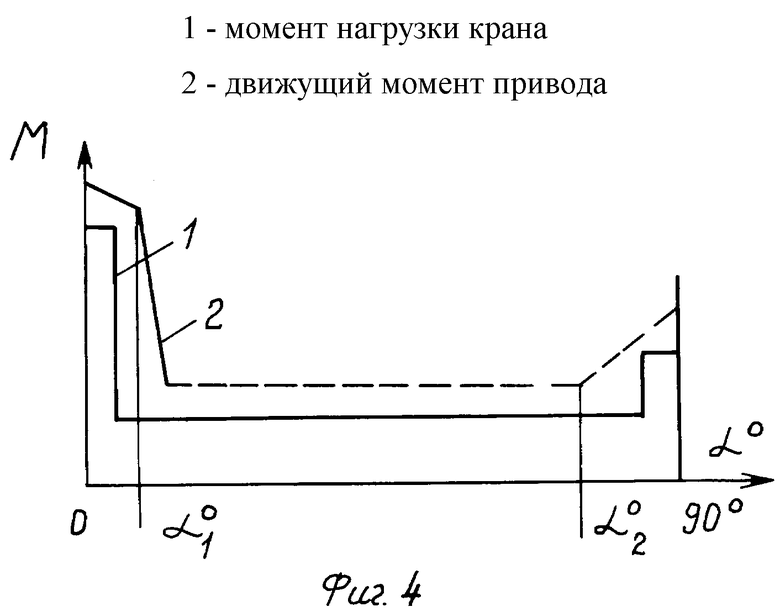
Характеристики момента нагрузки шарового крана в функции угла поворота α затвора («пробки») крана является существенно нелинейной (Фиг.4).
Наибольшее значение момент нагрузки МН1 имеет в интервале угла поворота 0÷α1. Номинальный рабочий момент МН2 в интервале α1<α<α2 в несколько раз меньше, чем МН1. В интервале α2÷α3 момент нагрузки снова несколько возрастает до величины МН3. Движущий момент Мдв привода выбирается из условия Мдв>МН1. Существенная нелинейность МН(α) приводит к тому, что при движении привода на интервале α2÷α3 движущий момент значительно превышает момент нагрузки. В результате привод разгоняется и подходит к конечному положению с большой избыточной скоростью и большой избыточной кинетической энергией подвижных частей, что вызывает значительные нагрузки при остановке привода и необходимость значительного усиления конструкции.
Введение специальных регуляторов (ограничителей) скорости связано с большими конструктивными трудностями и снижением надежности привода.
Предлагаемое решение обеспечивает достаточно простое решение задачи регулирования движущего момента в функции угла α и уменьшение кинетической энергии подвижных частей привода при приходе выходного вала привода в крайние положения. График движущего момента в этом случае представлен на Фиг.4.
Для приводов со струйным двигателем нежелательно повторное или многократное выключение привода в одном и том же направлении, если привод уже находится в заданном конечном (крайнем) положении, так как это приводит к дополнительным нагрузкам на конструкцию и ненужный расход рабочего тела.
Предлагаемое решение по блокировке рычагов местного управления обеспечивает невозможность повторного или многократного включения пневмоклапана привода в том же направлении, если привод уже находится в заданном положении.
Включение в схему устройства регуляторов давления рабочего тела обеспечивает постоянное давление рабочего тела на входе регуляторов расхода, что повышает точность работы регуляторов расхода.
Изобретение поясняется далее описанием примера осуществления со ссылкой на чертежи, где изображены:
На Фиг.1 - схема электропневматического управляющего устройства.
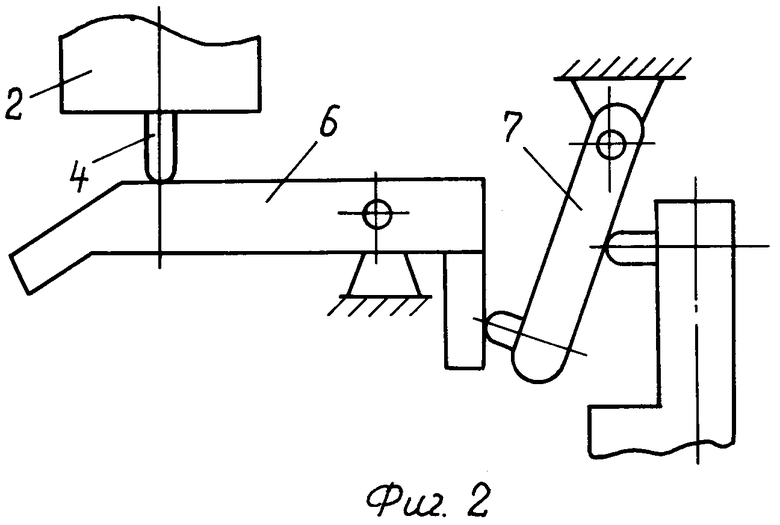
На Фиг.2 - схема механической блокировки включения пневмоклапанов.
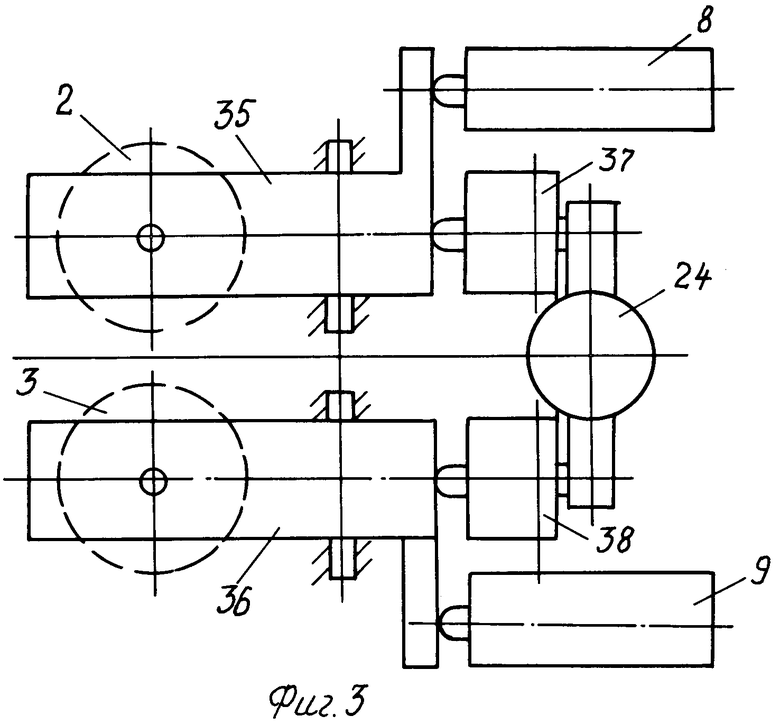
На Фиг.3 - вид Фиг.2 по стр. А.
На Фиг.4 - графики момента нагрузки шарового крана и движущего момента привода.
Электропневматическое управляющее устройство содержит взрывонепроницаемую камеру 1, в которой размещены электромагниты 2, 3, соединенные через толкатели 4, 5 (Фиг.3) с рычагами 6, 7 местного управления и через них с пневмоклапанами 8, 9, входы которых связаны с источником рабочего тела (сжатого газа) с давлением Р (не показан), а выходы - с регуляторами давления рабочего тела 11, 12, выходы которых связаны соответственно с регуляторами расхода рабочего тела 14, 15, содержащими управляющие элементы 16, 17; при этом выходы регуляторов соединены с выходными патрубками 18, 19 управляющего устройства, которые соединены соответственно со входными патрубками двигателя 21 привода 22, выходной вал 23 которого жестко связан со входным валиком 24 управляющего устройства.
На валике 24 жестко закреплен фигурный кулачок 25, подвижно через рычаги 26, 27 соединенный с управляющими элементами регуляторов 16, 17, при этом рычаги снабжены регулировочными винтами 28, 29.
Управляющее устройство содержит также устройства 31, 32 механической блокировки рычагов 35, 36 местного управления пневмоклапанами 8, 9, при этом рычаги 35, 36 через рычаги 37, 38 связаны с упорами входного валика 24.
На Фиг.1 приведено также задающее устройство 41 с ключом 42 и клеммами 43, 44.
Электропневматическое управляющее устройство работает следующим образом.
Пусть в исходном положении входной валик 24 устройства находится в положении «закрыто», что соответствует схеме на Фиг.1. При этом выступ рычага 26 находится на выступе кулачка 25 и регулируемое отверстие регулятора 16 максимально открыто, что обеспечивает максимальный движущий момент привода. При подаче электрического сигнала на открытие шарового крана, например, на клемму 43 с помощью ключа 42 срабатывает электромагнит 2 и открывает пневмоклапан 8. В результате рабочее тело (сжатый газ) от источника энергии с давлением Р поступает на регулятор давления 11, где его давление снижается до величины P1 и далее через регулятор расхода 14 поступает в двигатель 21 привода 22.
При повороте выходного вала привода на угол α1 выступ рычага 26 попадает во впадину кулачка 25, в результате чего управляющий элемент регулятора 14 перемещается влево и уменьшает площадь регулируемого отверстия, при этом расход рабочего тела в двигатель 21 уменьшится и пропорционально уменьшится движущий момент привода. При повороте вала на угол α2 (Фиг.4) выступ рычага 26 попадает на выступ кулачка меньшей величины, что приводит к частичному увеличению регулируемого отверстия регулятора и увеличению движущего момента привода.
При подходе вала привода к конечному положению упор валика 24 (Фиг.2, 3) воздействует через рычаг 37 на рычаг 35 местного управления, поворачивая его на ограниченный угол по часовой стрелке, отключая пневмоклапан 8 и препятствуя его повторному включению как от воздействия с помощью электромагнита (дистанционно), так и вручную рычагом 35.
При движении в обратную сторону регулирование движущего момента привода и блокировка в крайнем положении осуществляется аналогично с помощью фигурного кулачка 25, рычага 27, регулятора 15 и рычага 38.
Источники информации
1. А.Ф.Гуревич, О.Н.Заринский, Ю.К.Кузьмин. Справочник по арматуре для газо- и нефтепродуктов. Л.: Недра, 1988 г.
2. Патент Российской Федерации на изобретение №2194885, 2001 г. «Электропневматическое управляющее устройство для поршневых и струйных пневмоприводов шаровых кранов трубопроводов».
Устройство предназначено для дистанционного и местного управления пневматическими приводами со струйным двигателем. В электропневматическом управляющем устройстве, содержащем взрывонепроницаемую камеру, электромагниты, пневмоклапаны, входы которых связаны с источником рабочей среды под давлением, а выходы через регуляторы расхода рабочей среды - с выходными каналами устройства; электромагниты, механически подвижно связанные с пневмоклапанами, магнитоуправляемые конечные выключатели, постоянные магниты, соединенные с входным валиком устройства. При этом управляющие элементы регуляторов расхода рабочего тела подвижно связаны с входным валиком устройства. Электропневматическое управляющее устройство содержит также устройства механической блокировки рычагов местного управления пневмоклапанами. Технический результат - повышение надежности. 5 з.п. ф-лы, 4 ил.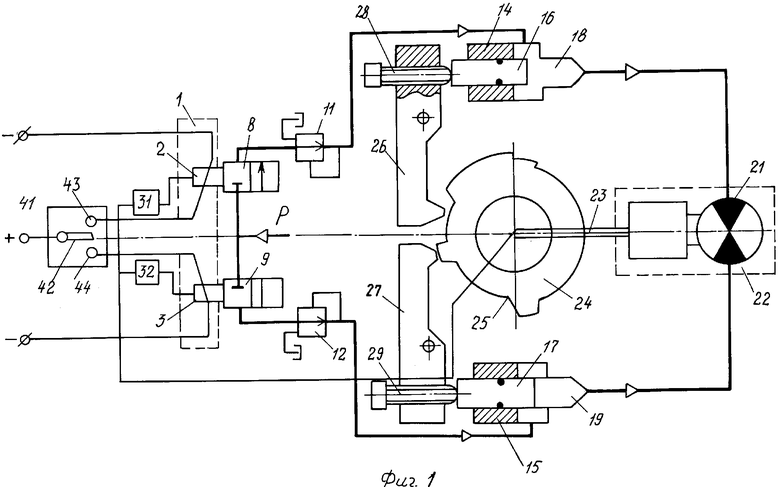
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОРШНЕВЫХ И СТРУЙНЫХ ПНЕВМОПРИВОДОВ ШАРОВЫХ КРАНОВ ТРУБОПРОВОДОВ | 2001 |
|
RU2194885C1 |
| и др | |||
| Справочник по арматуре для газо- и нефтепроводов | |||
| Л.: Недра, 1988, стр.346.RU 2178842 С1, 27.01.2002.DE 3142583 A1, 15.05.1983.US 4437386 A, 20.03.1984. | |||

