Изобретение относится к области пневмомашиностроения, в частности к механизмам, предназначенным для осуществления перестановки следящего и программного управления регулирующих органов запорной и регулирующей арматуры, в частности задвижек газонефтепродуктопроводов, при дистанционном и местном управлении.
Известен пневматический поршневой привод для регулирующих клапанов [Файнтрол. Поворотный регулирующий клапан FIELD CONTROLS "nelesautomations" 5 FT 20. Выпуск 3/2000]. Привод содержит пневмоцилиндр, в котором размещены:
поршень со штоком, возвратная пружина и эластичная разделительная пленка, при этом привод снабжен конечными выключателями, обеспечивающими прекращение подачи рабочего тела (газа) в конечном положении штока.
Техническими недостатками данного привода являются:
- наличие эластичной разделительной пленки, которая, как показывает опыт, является малонадежным элементом и снижает надежность и ресурс привода.
- наличие возвратной пружины вынуждает при ее сжатии держать привод под давлением в крайнем положении, что ухудшает эксплуатационные качества привода.
- привод является двухпозиционным и не обеспечивает возможности следящего или программного режима работы.
Известен пневматический привод ножевых задвижек K-NIFE фирмы «KEYSTONE», содержащий пневмоцилиндр с размещенным в нем поршнем со штоком [Рекламные материалы фирмы KEYSTONE, 1998].
Недостатками такого привода являются: наличие подвижных трущихся уплотнений поршня, что снижает надежность и долговечность привода, и невозможность использовать привод для работы в следящем или программном режиме работы.
Известны пневматический привод, электропневматическое управляющее устройство, струйный двигатель, устройство обратной связи и блок переключателей [RU 2159362 C1, 20.11.2000].
Пневматически привод содержит последовательно соединенное электропневматическое управляющее устройство; пневматический струйный двигатель, редуктор с ручным дублером, механическую передачу, включающую в себя червяк и червячное колесо, устройство поглощения кинетической энергии подвижных частей привода; устройство обратной связи; блоки переключателей; датчик обратной связи.
Электропневматическое управляющее устройство содержит корпус, крышку, электромагниты, пневмоклапаны, рычаги местного управления.
Струйный двигатель содержит корпус, ротор и подводящие патрубки.
Устройство обратной связи содержит корпус, жестко связанный с корпусом механической передачи, входной вал, жестко связанный с выходным валом привода.
Блок переключателей содержит корпус, крышку, входной валик.
Недостатком известной конструкции двигателя является высокая скорость вращения в случае значительного уменьшения нагрузки на валу привода по сравнению с начальной пусковой нагрузкой. Такой характер нагрузки имеет место в ряде устройств запорно-регулирующей арматуры (Фиг.15).
Известная конструкция двигателя предназначена для работы на открытых площадках и не имеет подвижных трущихся уплотнений, что существенно повышает надежность и ресурс работы привода. Однако отсутствие трущихся уплотнений приводит к утечкам газа в атмосферу, что в ряде случаев затрудняет применение привода в закрытых помещениях (когда в качестве рабочего газа используется природный газ).
Недостатком известной конструкции двигателя и его узлов являются также возникающие технологические трудности при изготовлении роторов, как единого цельного элемента.
Недостатком данных конструкций приводов и его узлов, как показал опыт, является трудность использования устройств поглощения кинетической энергии в качестве измерителей движущего момента и для организации отключения двигателя из-за их большой жесткости и малой деформации («хода»).
Задачей данной группы изобретений является создание пневматического привода для запорно-регулирующей арматуры газонефтепродуктопроводов. в частности, для задвижек и клапанов, имеющих более высокую надежность, расширение области применения, возможность осуществления следящего и программного режимов работы, улучшение условий эксплуатации, улучшение технологичности.
Задача решается тем, что в пневматическом приводе, содержащем последовательно соединенные электропневматическое управляющее устройство; пневматический струйный двигатель, редуктор с ручным дублером, механическую передачу, включающую в себя червяк и червячное колесо, устройство поглощения кинетической энергии подвижных частей привода; устройство обратной связи; блоки переключателей; датчик обратной связи, согласно изобретению механическая передача привода содержит устройство ограничения движущего момента, выполненное в виде пакета тарельчатых пружин, расположенное соосно с устройством поглощения кинетической энергии подвижных частей привода между двух втулок, имеющих выступающие пояски и подвижно размещенных в корпусе и при этом расположенных соосно на стяжном стержне с возможностью их ограниченного перемещения вдоль стержня без возможности вращения вокруг его оси; при этом один конец стержня установлен в подшипниках внутри червяка с возможностью вращения стержня и без возможности его осевого перемещения относительно червяка; при этом второй конец стержня снабжен наружным пояском, при этом снаружи втулок размещены подвижно опорные кольца, между которыми в корпусе размещены тарельчатые пружины устройства поглощения кинетической энергии подвижных частей привода.
Задача решается также тем, что на входе в электропневматическое управляющее устройство привода может быть установлен регулятор давления газа.
Задача решается также тем, что в электропневматическом управляющем устройстве, содержащем корпус, крышку, электромагниты, пневмоклапаны, рычаги местного управления, согласно изобретению пневмоклапаны установлены на наружной стороне стенки корпуса, при этом в стенке выполнены каналы, соединяющие вход каждого пневмоклапана с входным трубопроводом устройства, а выход каждого пневмоклапана соответственно с одним из выходных каналов устройства.
Задача решается также тем, что каждый рычаг местного управления может быть снабжен закрепленными в корпусе и подпружиненными дополнительным рычагом и фиксатором.
Задача решается также за счет того, что в струйном двигателе, содержащем корпус, ротор и подводящие патрубки, согласно изобретению ротор выполнен в виде вала с двумя осевыми каналами и двух плеч, в каждом из которых выполнен осевой канал и на выходном конце сопло, расположенное перпендикулярно каналу, при этом плечи закрепляются с двух сторон вала с помощью крепежных элементов.
Задача решается также за счет того, что плечи ротора двигателя могут быть снабжены пластинами, расположенными параллельно оси ротора;
а также за счет того, что входные патрубки двигателя могут быть снабжены устройствами регулирования расхода газа;
а также за счет того, что в корпусе двигателя может быть установлен вал с шестерней, входящей в зацепление с зубчатым венцом вала ротора, а на выходном конце вала в корпусе двигателя установлено уплотняющее устройство,
а также за счет того, что двигатель может быть выполнен с односторонним подводом газа в ротор, причем подводящее устройство выполнено в виде двух концентрически расположенных трубок, выход каждой из которых связан с одним из входов осевых каналов плеч ротора.
Задача решается также за счет того, что в устройстве обратной связи, содержащем корпус, жестко связанный с корпусом механической передачи, входной вал, жестко связанный с выходным валом привода, согласно изобретению на входном валу устройства жестко закреплена втулка, на наружной поверхности которой выполнена резьба, которая входит в зацепление с ответной резьбой, выполненной на валике, установленном в корпусе устройства, причем в валике выполнен осевой канал с внутренней резьбой, в котором установлен стержень с резьбой с возможностью его осевого перемещения при вращении валика и невозможностью его вращения вокруг оси, при этом выходной конец подвижно связан с входным элементом блока переключателей.
Задача решается также за счет того, что выходной конец стержня может быть связан подвижно с датчиком обратной связи;
а также за счет того, что входной валик устройства может быть связан с выходным валом привода через кинематическую цепь.
Задача решается также за счет того, что в блоке переключателей, содержащем корпус, крышку, входной валик, согласно изобретению на входном валике блока переключателей жестко закреплен поводок, с установленными на нем регулированными толкателями, при этом в корпусе установлены две оси-стойки, на которых подвижно закреплены рычаги, в которых с одной стороны установлены регулируемые упоры, а с другой постоянные магниты, при этом между рычагами установлена пружина, а в корпусе блока установлены герконы.
Задача решается также за счет того, что на концах рычагов могут быть установлены вертикально стержни, каждый из которых входит в соприкосновение с рычагами механических электропереключателей, установленных в корпусе.
Технический результат, достигаемый настоящим изобретением, состоит в следующем.
Более высокая надежность достигается за счет того, что механическая передача привода содержит устройство ограничения движущего момента, выполненное в виде пакета тарельчатых пружин, расположенное соосно с устройством поглощения кинетической энергии подвижных частей привода между двух втулок, имеющих выступающие пояски и подвижно размещенных в корпусе и при этом расположенных соосно на стяжном стержне с возможностью их ограниченного перемещения вдоль стержня без возможности вращения вокруг его оси; при этом один конец стержня установлен в подшипниках внутри червяка, с возможностью вращения стержня и без возможности его осевого перемещения относительно червяка; при этом второй конец стержня снабжен наружным пояском, при этом снаружи втулок размещены подвижно опорные кольца, между которыми в корпусе размещены тарельчатые пружины устройства поглощения кинетической энергии подвижных частей привода;
также за счет того, что плечи ротора двигателя снабжены пластинами, расположенными параллельно оси ротора;
также за счет того, что в корпусе двигателя установлен вал с шестерней, входящей в зацепление с зубчатым венцом вала ротора, а на выходном конце вала в корпусе двигателя установлено уплотняющее устройство;
также за счет того, что он выполнен с односторонним подводом газа в ротор, причем подводящее устройство выполнено в виде двух концентрически расположенных трубок, выход каждой из которых связан с одним из входов осевых каналов плеч ротора;
также за счет того, что на входе в электропневматическое управляющее устройство привода установлен регулятор давления газа.
Расширение области применения достигается за счет того, что механическая передача привода содержит устройство ограничения движущего момента, выполненное в виде пакета тарельчатых пружин, расположенное соосно с устройством поглощения кинетической энергии подвижных частей привода между двух втулок, имеющих выступающие пояски и подвижно размещенных в корпусе и при этом расположенных соосно на стяжном стержне с возможностью их ограниченного перемещения вдоль стержня без возможности вращения вокруг его оси; при этом один конец стержня установлен в подшипниках внутри червяка, с возможностью вращения стержня и без возможности его осевого перемещения относительно червяка; при этом второй конец стержня снабжен наружным пояском, при этом снаружи втулок размещены подвижно опорные кольца, между которыми в корпусе размещены тарельчатые пружины устройства поглощения кинетической энергии подвижных частей привода,
а также за счет того, что плечи ротора двигателя снабжены пластинами, расположенными параллельно оси ротора,
а также за счет того, что входные патрубки двигателя снабжены устройствами регулирования расхода газа.
Также за счет того, что в корпусе двигателя установлен вал с шестерней, входящей в зацепление с зубчатым венцом вала ротора, а на выходном конце вала в корпусе двигателя установлено уплотняющее устройство,
а также за счет того, что он выполнен с односторонним подводом газа в ротор, причем подводящее устройство выполнено в виде двух концентрически расположенных трубок, выход каждой из которых связан с одним из входов осевых каналов плеч ротора,
а также за счет того, что на входе в электропневматическое управляющее устройство привода установлен регулятор давления газа.
Следящий и программный режим работы реализуется за счет того, что на входном валу устройства жестко закреплена втулка, на наружной поверхности которой выполнена резьба, которая входит в зацепление с ответной резьбой, выполненной на валике, установленном в корпусе устройства, причем в валике выполнен осевой канал с внутренней резьбой, в котором установлен стержень с резьбой с возможностью его осевого перемещения при вращении валика и невозможностью его вращения вокруг оси, при этом выходной конец подвижно связан с входным элементом блока переключателей,
а также за счет того, что выходной конец стержня связан подвижно с датчиком обратной связи,
а также за счет того, что входной валик устройства связан с выходным валом привода через кинематическую цепь,
а также за счет того, что на входном валике блока переключателей жестко закреплен поводок с установленными на них регулированными толкателями, при этом в корпусе установлены две оси-стойки, на которых подвижно закреплены рычаги, в которых с одной стороны установлены регулируемые упоры, а с другой постоянные магниты, при этом между рычагами установлена пружина, а в корпусе блока установлены герконы,
а также за счет того, что на концах рычагов установлены вертикально стержни, каждый из которых входит в соприкосновение с рычагами механических электропереключателей, установленных в корпусе.
Улучшение условий эксплуатации достигается за счет того, что пневмоклапаны установлены на наружной стороне стенки корпуса, при этом в стенке выполнены каналы, соединяющие вход каждого пневмоклапана с входным трубопроводом устройства, а выход каждого пневмоклапана соответственно с одним из выходных каналов устройства,
а также за счет того, что на входе в электропневматическое управляющее устройство привода установлен регулятор давления газа.
Улучшение технологичности достигается за счет того, что ротор выполнен в виде вала с двумя осевыми каналами и двух плеч, в каждом из которых выполнен осевой канал и на выходном конце сопло, расположенное перпендикулярно каналу, при этом плечи закрепляются с двух сторон вала с помощью крепежных элементов.
Изобретение поясняется далее описанием примеров осуществления со ссылкой на чертежи, где изображены:
На Фиг.1 - схема привода.
На Фиг.2 - схема электропневматического управляющего устройства.
На Фиг.3 - схема электропневматического управляющего устройства - и вариант.
На Фиг.4 - схема струйного двигателя.
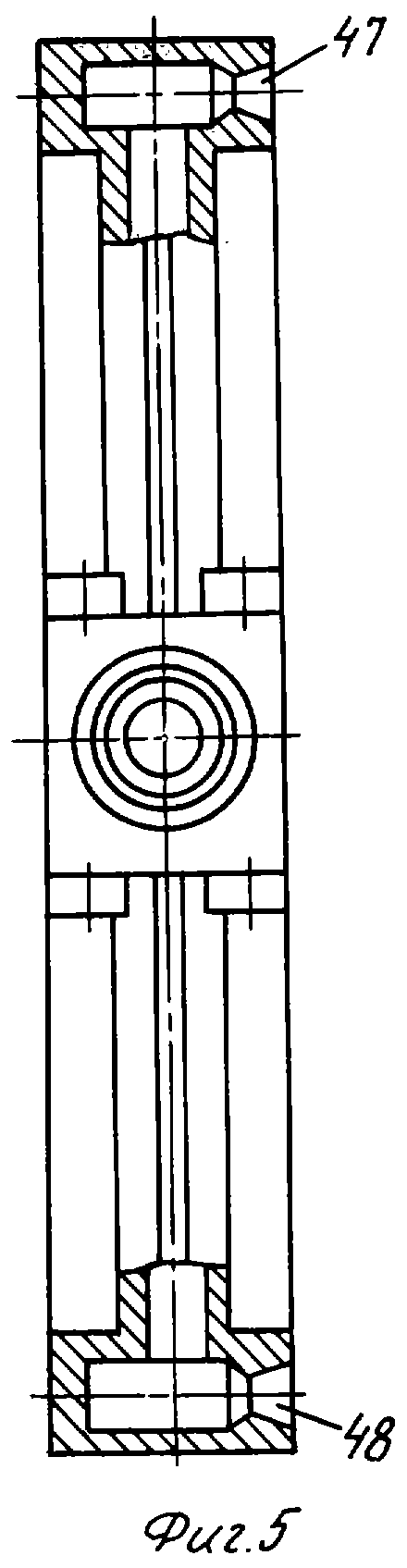
На Фиг.5 - вид ротора струйного двигателя Фиг.4 по стрелке А.
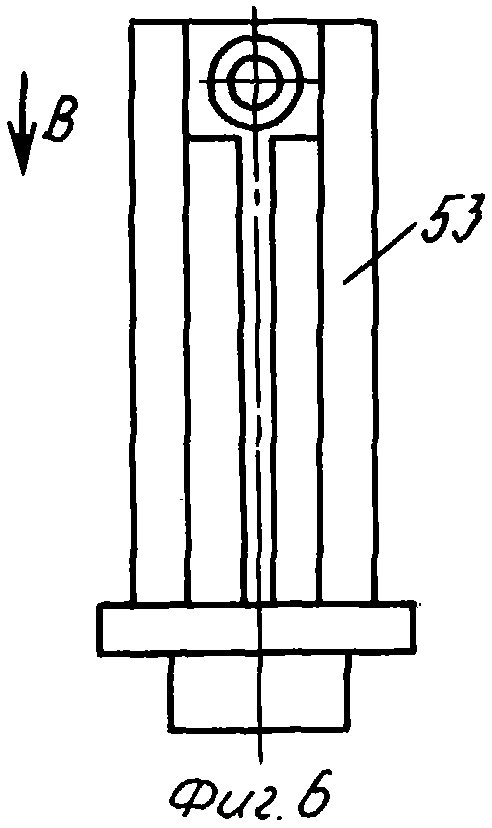
На Фиг.6 - схема плеча ротора.
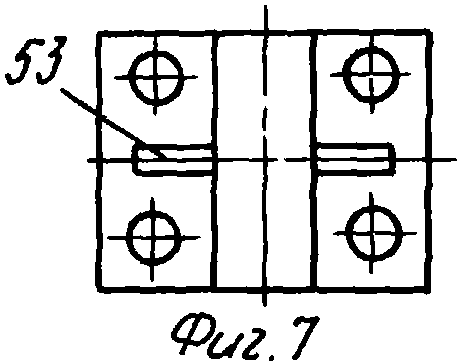
На Фиг.7 - вид Фиг.6 по стрелке В.
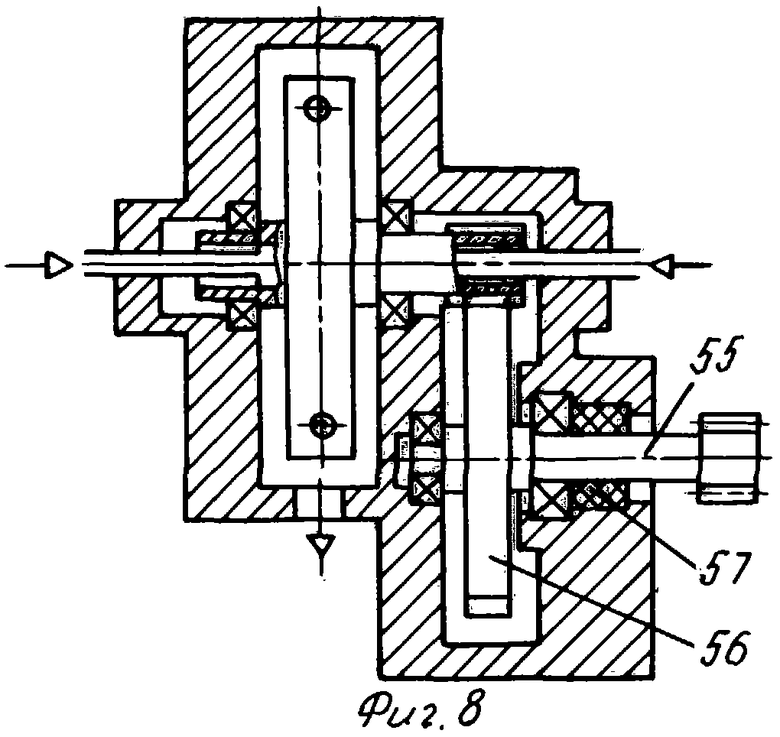
На Фиг.8 - схема двигателя с дополнительной шестерней.
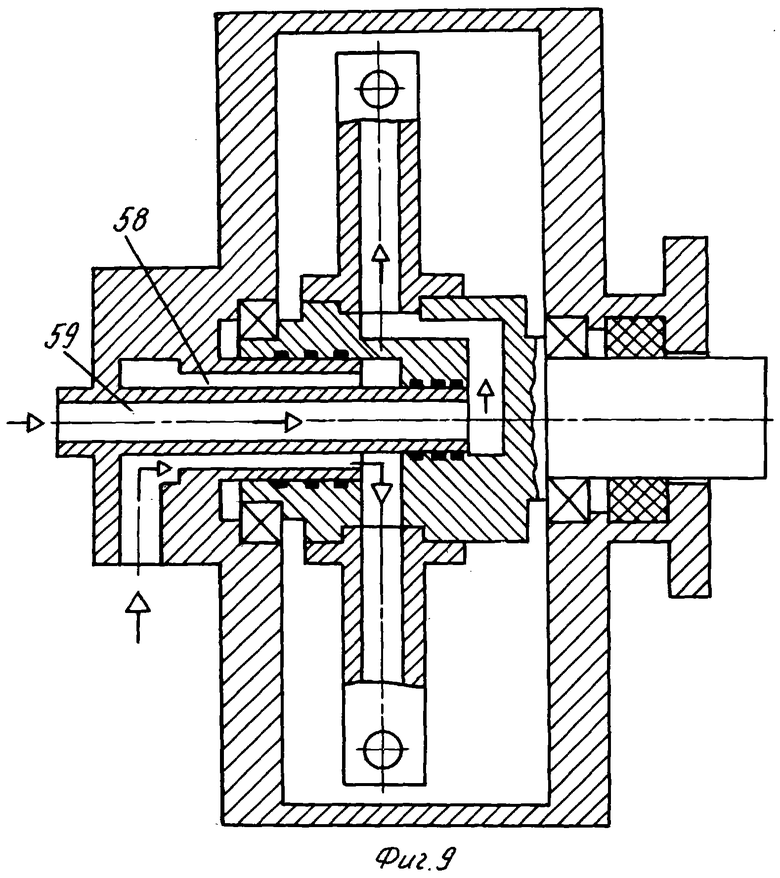
На Фиг.9 - схема двигателя с односторонним подводом газа.
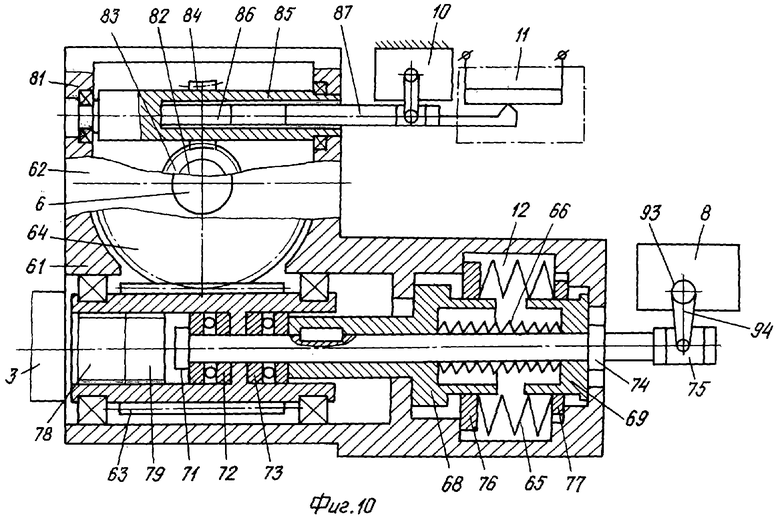
На Фиг.10 - схема механической передачи.
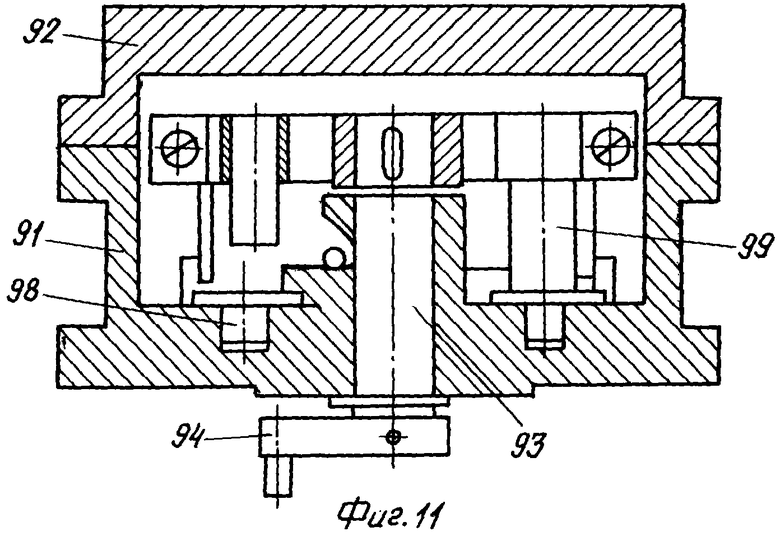
На Фиг.11 - схема блока переключателей.
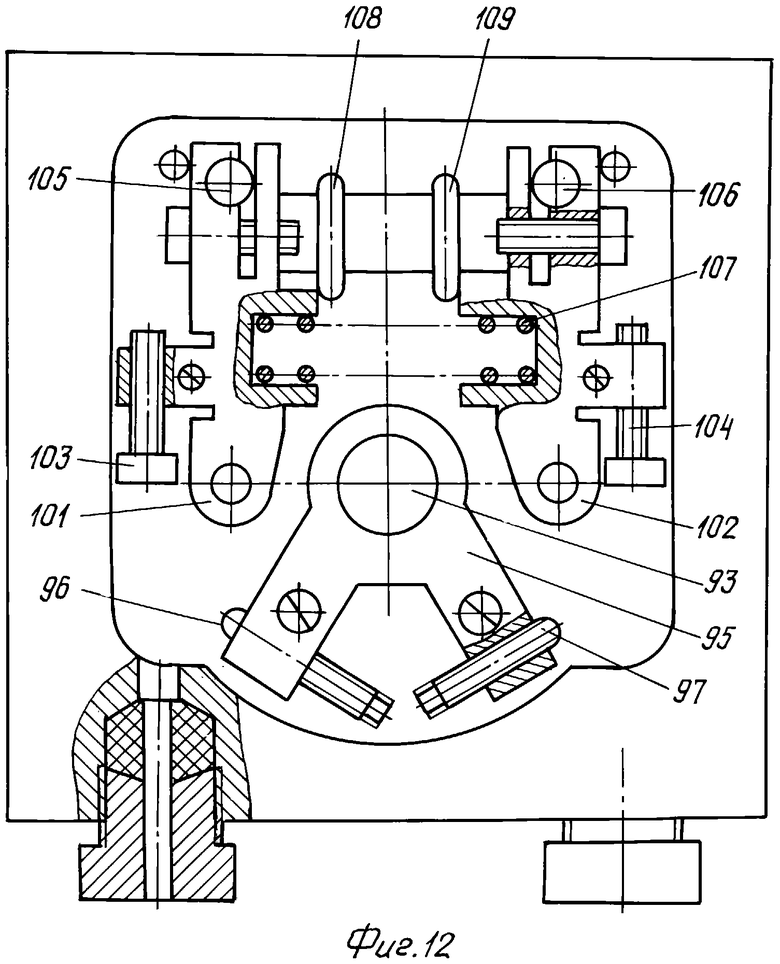
На Фиг.12 - вид Фиг.11 по стрелке С со снятой крышкой.
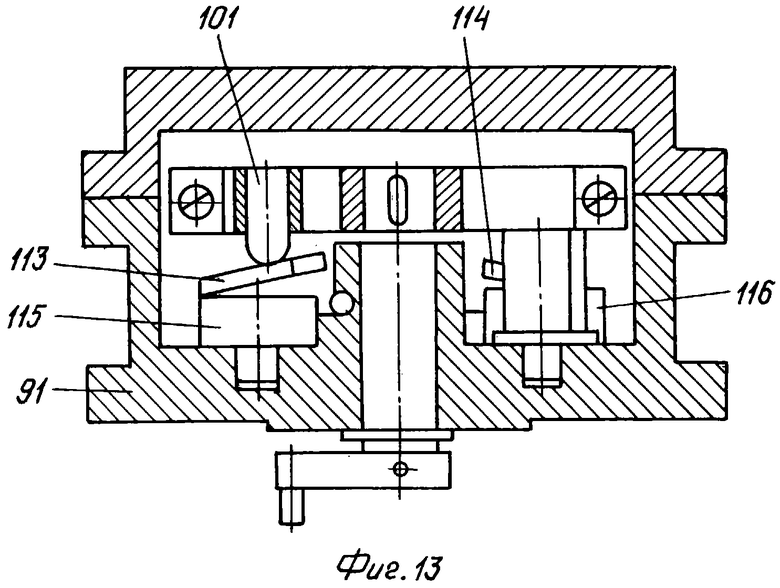
На Фиг.13 - схема второго варианта блока переключателей.
На Фиг.14 - вид Фиг.13 по стрелке D со снятой крышкой.
На Фиг.15 - типовые графики зависимостей моментов нагрузки привода в функции от угла поворота выходного вала привода (для шаровых кранов газопроводов) при движении в сторону открытия (кривая 1) и в сторону закрытия (кривая 2).
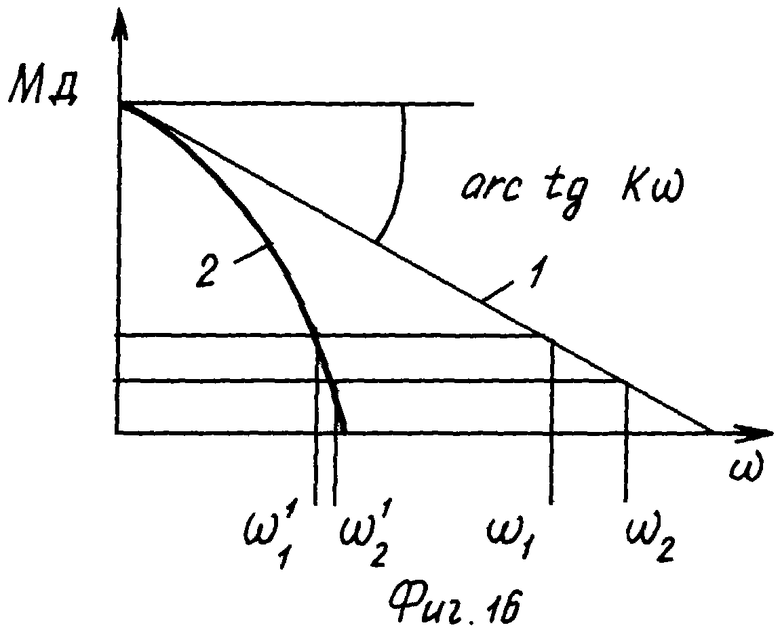
На Фиг.16 - графики зависимостей движущего момента привода при отсутствии (линия 1) и наличии (кривая 2) аэродинамического сопротивления ротора.
Пневматический привод (Фиг.1) содержит последовательно соединенные: электропневматическое управляющее устройство 1, пневматический струйный двигатель 2, редуктор 3 с ручным дублером 4, механическую передачу 5 с выходным валом привода 6, устройством ограничения движущего момента 7, соединенным с блоком переключателей 8, устройство обратной связи 9, соединенное с блоком переключателей 10 и датчиком положения 11; устройство 12 поглощения кинетической энергии подвижных частей привода, при этом выходы блоков переключателей 8, 10, и датчика положения 11 соединены с системой управления (в заявку не входит).
Электропневматическое управляющее устройство 2 (Фиг.1-3) содержит: корпус 21, крышку 22, размещенные внутри корпуса электромагниты 23, 24, пневмоклапаны 25, 26, установленные с наружной стороны стенки 27 корпуса и связанные с электромагнитами с помощью толкателей 28 и рычагов местного управления 29. В стенке 27 выполнены каналы 31, соединяющие вход каждого пневмоклапана с входными трубопроводами устройства, а выход каждого пневмоклапана соответственно с одним из выходных каналов устройства. 2-й вариант электропневматического управляющего устройства (Фиг.3) содержит также подпружиненные рычаги 34 с защелками 35. На входе в электропневматическое устройство установлен регулятор давления газа 37 (Фиг.1).
Струйный двигатель 3 (Фиг.4-9) содержит корпус 41, ротор 42, содержащий вал 43 с зубчатым венцом 44, плечи 45, 46, закрепленные на валу с помощью крепежных элементов 47. В плечах ротора выполнены осевые каналы и сопла 47, 48. Двигатель содержит также подводящие патрубки 49, 50 с устройствами регулирования расхода газа 51, 52. Плечи ротора снабжены пластинами 53, расположенными параллельно оси плеча и оси ротора (Фиг.6, 7).
Во втором варианте струйного двигателя (Фиг.8) в корпусе двигателя установлен вал 55 с шестерней 56, входящей в зацепление с зубчатым венцом вала ротора, а на выходном конце вала 55 в корпусе установлено уплотняющее устройство 57.
В третьем варианте струйного двигателя (Фиг.9) выполнен с односторонним подводом газа в ротор, причем подводящее устройство выполнено в виде двух концентрических трубок 58, 59, выход каждой из которых связан с одним из входов осевых каналов плеч ротора.
Механическая передача (Фиг.1, 10) содержит корпус 61, крышку 62, червяк 63, червячное колесо 64, жестко соединенное с выходным валом 6 привода, устройство поглощения кинетической энергии подвижных частей привода 12, выполненное в виде пакета тарельчатых пружин 65.
Механическая передача содержит также устройство ограничения движущего момента, выполненное в виде пакета тарельчатых пружин 66, расположенных соосно с пакетом тарельчатых пружин 65 между двух втулок 68, 69, имеющих выступающие пояски и подвижно размещенных на стяжном стержне 71 с возможностью их ограниченного перемещения вдоль стержня без возможности вращения вокруг его оси; при этом один конец стержня установлен в подшипниках 72, 73 внутри червяка 63 с возможностью вращения и без возможности его осевого перемещения относительно червяка; при этом второй конец стержня снабжен наружным пояском 74 и поперечным пазом 75; причем снаружи втулок 66, 67 с двух сторон пакета тарельчатых пружин 65 размещены подвижно опорные кольца 76, 77. Выходной вал 78 редуктора 3 соединен шлицами 79 с червяком 63.
Устройство обратной связи 9 (Фиг.1, 10) содержит корпус 81, жестко связанный с корпусом 61, входной вал 82, жестко связанный с выходным валом привода 6, при этом на входном валу 82 устройства жестко закреплена втулка 83, на наружной поверхности которой выполнена резьба, которая входит в зацепление с ответной резьбой 84, выполненной на валике 85, установленном в корпусе 81, причем в валике выполнен осевой канал 86 с внутренней резьбой, в которой установлен стержень 87 с резьбой с возможностью его осевого перемещения при вращении валика, и невозможностью его вращения вокруг оси, при этом выходной конец стержня подвижно связан с входным элементом блока переключателей 10.
Блок переключателей 8, 10 (Фиг.1, 11-14) содержит корпус 91, крышку 92, входной валик 93 с рычагом 94; жестко закрепленный на валике поводок 95 с установленными на нем регулируемыми толкателями 96, 97, при этом в корпусе 91 установлены две оси-стойки 98, 99, на которых подвижно закреплены рычаги 101, 102, в которых с одной стороны установлены регулируемые упоры 103, 104, а с другой - постоянные магниты 105, 106, при этом между рычагами установлена пружина 107, а в корпусе 81 установлены герконы 108,109.
Во втором варианте на концах рычагов 101, 102 закреплены вертикально стержни 111, 112, каждый из которых входит в соприкосновение, соответственно, с рычагами 113, 114 механических переключателей 115, 116, установленных в корпусе 91.
Пневматический привод, электропневматическое управляющее устройство, струйный двигатель, устройство обратной связи, блоки переключателей работают совместно следующим образом.
При поступлении от системы управления 12 электрического сигнала на электромагнит (например, 23, Фиг.1), электромагнит срабатывает и через толкатель 28 и рычаг 29 открывает пневмоклапан 25. В результате сжатый воздух или газ из источника питания с давлением Р поступает через патрубок 50 в ротор 42 струйного двигателя 2 и, вытекая из сопла 47, создает реактивную силу и движущий момент на валу ротора 43 и привода 6.
Пакет пружин 65 и 66 (Фиг.10) имеют начальное поджатие соответственно с силой F1 и F2, при этом F1≫F2.
При повороте (вращении) выходного вала привода 6 поворачивается (вращается) вал 82 устройства обратной связи, вращение которого передается через резьбу 84 валику 85, вращение которого с помощью внутренней резьбы преобразуется в осевое (поступательное) перемещение стержня 87, пропорциональное углу поворота выходного вала привода. При подходе к заданному положению вала привода входной валик 93 (Фиг.10) блока переключателей 10 через поводок 95, толкатель (например, 97), регулируемый упор 104 и рычаг 202 переместит постоянный магнит 106 к геркону 109. В результате произойдет размыкание контактов геркона и размыкание цепи питания электромагнита 23; пневмоклапан 25 закроется, подача сжатого воздуха (газа) в двигатель 2 прекратится и привод остановится.
Во втором варианте (Фиг.12, 13) при подходе к заданному положению вала привода размыкание цепи электромагнита осуществляется за счет воздействия стержня 112 на рычаг механического переключателя 116.
В случае соединения стержня 87 с датчиком обратной связи 11 (Фиг.10) информация о положении выходного вала привода подается непрерывно в систему управления 12, где может быть использоваться для выработки соответствующего закона управления.
В случае если по какой-либо причине движущий момент двигателя возрастет выше допустимой величины, усилие на оси червяка также возрастет и преодолеет усилие предварительного поджатия пакета пружин 66. В результате червяк 63 переместится вдоль своей оси (например, вправо на Фиг.10) и через втулку 68 сожмет пакет пружины 66; при этом выходной конец стержня 71 через рычаг 94 (Фиг.11, 12) повернет валик 93 блока переключателей 8 и через поводок 95, толкатель 97, упор 104, рычаг 102 переместит постоянный магнит 106 в сторону геркона 109, разомкнет цепь электромагнита 23, закрывая пневмоклапан 25 и прекращая подачу сжатого газа в двигатель. Тем самым обеспечивается ограничение максимального движущего момента привода.
Величина максимального момента определяется величиной начального поджатия пакета пружин 66 и регулировкой блока переключателей 8.
При приходе вала привода в крайнее положение («посадке на упор») и прекращении подачи газа в двигатель, ротор двигателя и связанные с ним подвижные части привода, в том числе червяк 63, будут продолжать вращаться по инерции за счет накопленной во время движения кинетической энергии (при неподвижном выходном вале 82 и жестко связанным с ним червячным колесом 64). Червяк 63 при этом продолжает вращаться и перемещаться вдоль своей оси (например, вправо по Фиг.10). При этом через втулку 68 он будет сжимать пакет пружин 66 и, далее, через опорное кольцо 76 будет сжимать пакет пружин 65 до тех пор, пока вся кинетическая энергия подвижных частей не преобразуется в потенциальную энергию сжатых пружин пакета 65. Наличие пакета 65 обеспечивает безударную остановку привода при любом режиме работы.
Произвольного выпрямления пружин не происходит в силу того, что червячная передача делается самотормозящейся.
Из физики и газодинамики известно [Пневматические приводы летательных аппаратов. Учебное пособие для ВУЗов. Под общей редакцией д.т.н. В.В.Саяпина. Машиностроение, 1992], что движущий момент Мд струйного двигателя определяется выражением

где ΔG - расход газа через двигатель;
(ω) - угловая скорость вращения ротора двигателя;
КGM, Кω - постоянные коэффициенты;
Ксвд - аэродинамический коэффициент сопротивления ротора двигателя, пропорциональный площади поперечного сечения («миделя») плеч ротора (Фиг.16).
Из Фиг.15 и 16 видно, что при отсутствии аэродинамического сопротивления скорость вращения выходного вала привода равна ω1 при открытии крана и ω2 при закрытии.
При наличии аэродинамического сопротивления (пластин на роторе по п.6 формулы изобретения) величина максимального «пускового» момента привода сохраняется, при этом скорости вращения ω'1, ω'2 вала привода при движении с малыми нагрузками значительно меньше скоростей ω1 и ω2.
Выполнение ротора по п.6 формулы изобретения (Фиг.6) практически означает введение ограничения максимальной скорости вращения выходного вала привода.
Так как кинетическая энергия подвижных частей привода пропорциональна квадрату скорости вращения выходного вала, то уменьшение максимальной скорости вращения существенно уменьшает кинетическую энергию подвижных частей и существенно уменьшает нагрузки в пакете пружин 65 и всех элементах конструкции привода.
Установка на входе в электропневматические устройства регулятора давления газа (Фиг.1, по п.2 формулы изобретения) позволяет применять привод в широком диапазоне давлений газа (Р=1.0÷16.0 МПа) без изменений его основных характеристик.
Снабжение выходных патрубков двигателя регуляторами расхода газа (Фиг.4, по п.7 формулы изобретения) позволяет производить регулирование («настройку») работы привода отдельно в каждом направлении движения в зависимости от характера нагрузки (Фиг.15).





Изобретения касаются устройств управления регулирующих органов арматуры, в частности задвижек газонефтепродуктопроводов. Привод содержит электропневматическое управляющее устройство, пневматический струйный двигатель, редуктор, передачу, включающую в себя червяк (Ч) и червячное колесо, устройства: поглощения (УП) кинетической энергии подвижных частей привода, ограничения движущего момента привода, обратной связи, и блоки переключателей. Устройство ограничения выполнено в виде пакета тарельчатых пружин и расположено соосно с УП между двух втулок, имеющих выступающие пояски, подвижно размещенных в корпусе и расположенных соосно на стяжном стержне (С) с возможностью их ограниченного перемещения вдоль С без возможности вращения вокруг его оси. Один конец С установлен в подшипниках внутри Ч с возможностью вращения С и без возможности его осевого перемещения относительно Ч. Второй конец С снабжен наружным пояском. Снаружи втулок размещены подвижно опорные кольца, между которыми в корпусе размещены тарельчатые пружины УП. Изобретения направлены на повышение надежности, расширение области применения, улучшение технологичности и условий эксплуатации. 5 н. и 9 з.п. ф-лы, 16 ил.
| МНОГООБОРОТНЫЙ ПНЕВМАТИЧЕСКИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ, УСТРОЙСТВО ПОГЛОЩЕНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ПОДВИЖНЫХ ЧАСТЕЙ (ВАРИАНТЫ) | 1999 |
|
RU2159362C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2178842C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| DE 3142583 A1, 19.05.1983 | |||
| US 4437386 A, 20.03.1984. | |||

