Изобретение относится к области физиологии и медицины, в частности к офтальмологии, и может быть использовано для определения и записи движений глаз в диагностических процедурах.
Известен ряд способов определения траектории движений глаз (патент US 5491492, А 61 В 3/14, опубл. 6.06.1995 г.) [1], (патент US 5422689, А 61 В 3/14, опубл. 13.02.1996 г.) [2], основанных на сравнении величин электроокулографических потенциалов, зарегистрированных в разных отведениях. Для регистрации электроокулографических потенциалов используют от 4 до 7 электродов. К недостаткам этих способов относится то, что информацию о движении глаз получают, сравнивая величины самих электроокулографических потенциалов, зарегистрированных в разных отведениях. В связи с этим данные способы требуют калибровки сигналов, состоящей в определении общего нулевого уровня, а также периодической компенсации его изменений. Ввиду использования усилителей постоянного тока указанные способы чувствительны к поляризационным процессам на электродах. Кроме того, как показали исследования авторов, электроокулографические потенциалы, отражающие смещения взора по вертикали, подвержены влиянию артефактов, вызываемых мигательными движениями.
Усовершенствованием указанных способов является способ регистрации содружественных движений глаз, который предполагает не сравнение самих электроокулографических потенциалов, а определение их приращений (патент RU №2203608 С2 МПК А 61 В 3/113, опубл. 10.05.2003 г.) [3], принимаемый за прототип.Это делает результат вычислений независимым от исходного уровня потенциалов и от их абсолютных значений. В отличие от предшествующих методов [1, 2], в которых используются от 4 до 7 электродов, данный способ ограничивается использованием трех электродов: одного лобного (общего), находящегося между надбровными дугами над назионом, и двух активных, расположенных с темпоральной стороны глазниц ниже краев глаз. Такой способ позволяет получить данные о содружественном движении глаз в двумерной декартовой системе координат по приращениям электроокулографических потенциалов, регистрируемых одновременно в двух отведениях. Для определения траектории движений глаз вычисляют значения разности между приращением электроокулографического потенциала в одном отведении за определенный промежуток времени и приращением электроокулографического потенциала в другом отведении за этот же период времени, что соответствует приращению по оси «X» в декартовой системе координат. Значение же суммы этих приращений соответствует приращению по оси «Y».
Однако в прототипе сохраняется недостаток, присущий описанным выше аналогам. Речь идет об искажениях электроокулограммы или ее приращений, вызываемых мигательными движениями. Высокоамплитудные артефакты мигания накладываются на потенциалы, отражающие вертикальную составляющую глазных движений (Фиг.2), что приводит к ошибкам в оценке траектории движений глаз.
Техническим результатом заявляемого изобретения является устранение ошибок в оценке траектории движений глаз, вызываемых мигательными артефактами, за счет исключения общего (лобного) электрода и использования только одного биполярного отведения, регистрирующего горизонтальную составляющую глазных движений, на которую мигательные артефакты не оказывают своего влияния.
Технический результат достигается тем, что в способе определения траектории движений глаз при саккадических перемещениях взора, включающем использование активных электродов, расположенных с темпоральных сторон глазниц, и регистрацию электроокулограммы, отражающей приращения электроокулографических потенциалов (ЭОГ), по которым определяют направление перемещения взора, согласно изобретению активные электроды размещают на уровне краев глаз и измеряют амплитуду и время формирования ЭОГ, при этом амплитуда ЭОГ отражает перемещение взора в горизонтальной плоскости и соответствует углу Н поворота глаз по оси Х в сферической системе координат, а время формирования ЭОГ соответствует углу D поворота глаз в диагональной плоскости сферической системы координат.
С использованием углов Н и D вычисляют угол V поворота глаз в вертикальной плоскости, что соответствует смещению взора по оси Y в сферической системе координат.
Углы Н и V являются координатами отображенного на экране периферического стимула, на который направлен взор испытуемого после выполнения саккадического перемещения.
Угол Н вычисляют по формуле:
Н=(А-0,59)/0,08,
где А - нормированная амплитуда ЭОГ, равная отношению амплитуды ЭОГ при очередном саккадическом перемещении взора (мкВ) к усредненной амплитуде ЭОГ для горизонтальных саккад величиной 10 угл. град (мкВ).
Угол D вычисляют по формуле:
D=(Т-0,59)/0,04,
где Т - нормированное время формирования ЭОГ, равное отношению времени формирования ЭОГ при очередном саккадическом перемещении взора (мс) к усредненному времени формирования ЭОГ для горизонтальных саккад величиной 10 угл. град.
Угол V вычисляют с использованием значений найденных углов D и Н по известной формуле:
V=arcos(cos D/cos H).
Для перевода координат направления взора из сферической системы в декартову вычисляют произведение тангенса найденных углов V и Н на расстояние L между глазами и экраном, на котором отображаются стимулы.
Способ позволяет получить неискаженные данные о содружественном движении глаз в сферической и декартовой системах координат по приращениям электроокулографических потенциалов, регистрируемых только в одном горизонтальном отведении, поскольку в этом отведении ЭОГ не подвержены искажениям со стороны артефактов, вызываемых мигательными движениями.
Способ определения траектории движений глаз при саккадических перемещениях взора поясняется чертежами.
На фиг.1 изображена блок-схема установки для регистрации ЭОГ.
На фиг.2 приведены примеры ЭОГ, где а - фрагмент безартефактной записи ЭОГ саккадического движения глаз; б - фрагмент записи ЭОГ, искаженной мигательным движением.
На Фиг.3 приведен фрагмент записи ЭОГ, поясняющий определение амплитудно-временных параметров ЭОГ, где а - амплитуда ЭОГ (мкВ), t - время формирования ЭОГ (мс).
На фиг.4 приведен фрагмент записи ЭОГ, отражающий смену полярности ЭОГ на активных электродах при отклонении взора вправо и влево от точки фиксации взора.
На фиг.5 представлен график зависимости амплитуды ЭОГ от угла горизонтального смещения взора, где по оси Х отложен угол горизонтального смещения взора, по оси Y - нормированная амплитуда ЭОГ, а также уравнение регрессии кривой.
На фиг.6 представлен график зависимости времени формирования ЭОГ от угла смещения взора, где по оси Х отложен угол смещения взора, по оси Y - нормированное время формирования ЭОГ.
На фиг.7 приведена схема расположения электродов для регистрации ЭОГ на лице испытуемого, где C1-C2 - биполярное отведение.
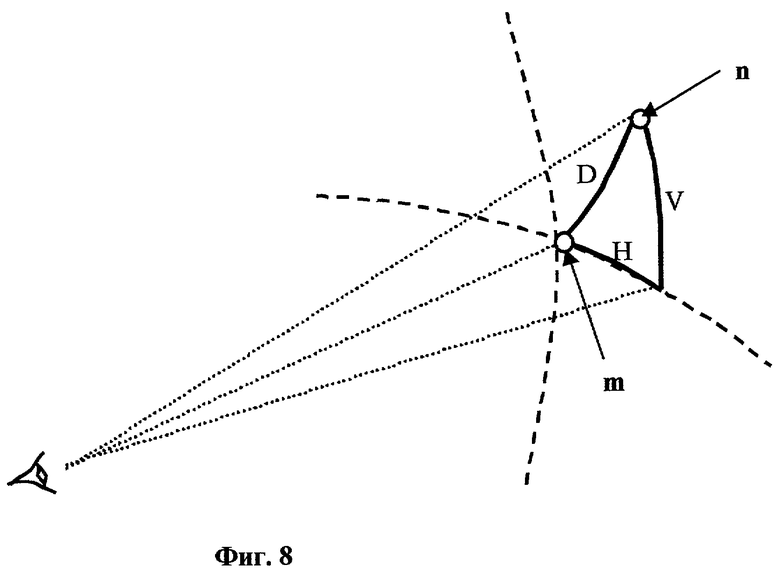
На фиг.8 показаны проекции трех составляющих саккадического перемещения взора на сферическую поверхность, где Н - угол горизонтального смещения взора, D - угол диагонального смещения взора, V - угол вертикального смещения взора, m - точка начальной фиксации взора, n - периферический стимул, к которому испытуемый совершает саккаду.
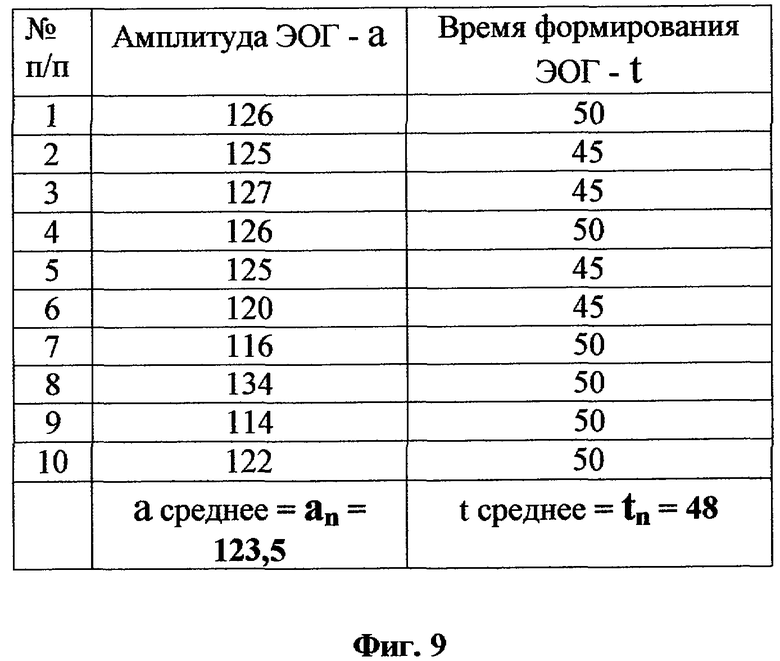
На фиг.9 приведена таблица, поясняющая вычисление индивидуальных усредненных значений амплитуды (an) и времени формирования (tn) ЭОГ.
Блок-схема установки (фиг.1) для осуществления способа определения траектории движений глаз при саккадических перемещениях взора содержит: чашечковые электроды (d=9 мм) 1, полосовой усилитель биосигнала (УБС) 2, аналогово-цифровой преобразователь (АЦП) 3, персональный компьютер 4, полосовой цифровой фильтр 5, экран монитора 6, жесткий магнитный диск 7, экран 8.
Фильтрация сигнала осуществлялась в диапазоне 1-30 Гц. Частота оцифровки сигнала - 200 Гц. Запись ЭОГ осуществлялась в непрерывном режиме на жесткий магнитный диск.
Для регистрации ЭОГ использовали два активных электрода, которые размещали с темпоральных сторон глазниц испытуемого на уровне зрачков (Фиг.7). ЭОГ регистрировались при саккадических перемещениях взора. При этом смещение взора влево и вправо определяло полярность ЭОГ (Фиг.4).
Для описания траектории перемещения взора измеряли амплитуду а и время формирования t ЭОГ, возникающей при очередном саккадическом движении глаз (Фиг.3).
Уравнение зависимости амплитуды ЭОГ от угла горизонтального смещения взора получено на группе испытуемых в исследовании, предусматривающем перемещение взора из одной заданной точки пространства в другую:

где Н - угол поворота глаз по оси Х в сферической системе координат,
А - нормированная амплитуда ЭОГ.
В том же исследовании получено уравнение зависимости времени формирования ЭОГ от угла смещения взора:

где D - угол поворота глаз в диагональной плоскости сферической системы координат,
Т - нормированное время приращения потенциала.
Уравнения представляют собой функцию регрессии установленных авторами кривых, отражающих зависимость амплитуды (Фиг.5) и времени формирования ЭОГ (Фиг.6) от угла смещения взора.
Способ определения траектории движений глаз при саккадических перемещениях взора осуществляется следующим образом.
На уровне краев глазниц испытуемого располагают два активных электрода (Фиг.7). Испытуемого помещают перед экраном 8 (Фиг.1) на расстоянии 35 см. Голову фиксируют в лобно-подбородочном упоре. Испытуемый фокусирует взгляд в центре перекрестья, изображение которого формируется на экране.
На первом этапе исследования испытуемому предлагалось выполнить 10 саккадических перемещений взора от центрального перекрестья к периферическому стимулу и обратно. Периферический стимул в виде высококонтрастной точки был расположен на горизонтальном меридиане на расстоянии 10 угл. град от центрального перекрестья (т.е. эксцентриситет стимула равен 10 угл. град). ЭОГ регистрировали на каждый поворот глаз. С помощью специальной компьютерной программы измеряли амплитуду - а и время - t для каждого из десяти ЭОГ. Затем проводили усреднение десяти значений а и десяти значений t. Данная последовательность действий представляет собой процедуру калибровки и позволяет получить индивидуальные для каждого испытуемого усредненные значения амплитуды ЭОГ - an, а также усредненные значения времени формирования ЭОГ - tn для горизонтальных саккад величиной 10 угл. град.
Значения an и tn используют при вычислении А - нормированной амплитуды ЭОГ и Т - нормированного времени формирования ЭОГ.
На втором этапе исследования, с использованием программы зрительной стимуляции, в разных участках экрана предъявлялись высококонтрастные тестовые точки (стимулы). Испытуемый совершал саккадическое движение глаз к каждому вновь появившемуся стимулу.
Аналогично первому этапу, измеряли амплитуду - аi и время формирования - ti каждой ЭОГ, возникающей при саккадическом движении глаз. Затем вычисляли нормированную амплитуду ЭОГ - А, как отношение аi/an, а также нормированное время формирования ЭОГ - Т, как отношение ti/tn.
Затем, в соответствии с полученными на группе испытуемых уравнениями (1) и (2), вычисляли углы поворота глаз в горизонтальной и диагональной плоскостях по следующим формулам:

где Н - угол поворота глаз в горизонтальной плоскости (угл. град),
А - нормированная амплитуда ЭОГ.

где D - угол поворота глаз в диагональной плоскости (угл. град),
Т - нормированное время формирования ЭОГ. Исследования авторов показали, что данная формула справедлива для перемещения взора в любом направлении.
Затем, согласно соотношению углов в сферическом треугольнике DHV (Фиг.8), вычисляли угол V поворота глаз в вертикальной плоскости по известной тригонометрической формуле (Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся Втузов. М. 1954. С.192) [4]:

В результате получали координаты точки в сферической системе координат, на которую направлен взор испытуемого после выполнения саккады.
Чтобы перевести координаты точки из сферической системы координат в декартову, вычисляют произведение тангенсов найденных углов V и Н на расстояние L между глазами испытуемого и экраном, на котором отображаются стимулы (tg Н×L; tg V×L).
Пример определения координат одной из точек в поле зрения, на которую переводится взор испытуемого Б.М. при выполнении саккады.
1. Осуществляют запись калибровочного сигнала, представляющего собой 10 ЭОГ, возникающих при осуществлении саккадических движений к тестовой точке, расположенной на горизонтальном меридиане с эксцентриситетом 10 град.
2. Измеряют амплитуду а и время t каждой из 10 ЭОГ.
3. Вычисляют an - индивидуальную усредненную амплитуду ЭОГ, а также tn - индивидуальное усредненное время формирования ЭОГ для горизонтальных саккад величиной 10 угл. град.
Пример вычисления названных показателей для испытуемого Б.М. приведен в таблице (Фиг.9).
Согласно значениям таблицы: an=123,5 мкВ; tn=48 мс.
4. Предъявляют тестовый стимул с координатами: эксцентриситет по горизонтали=14,1 угл. град, эксцентриситет по вертикали=14,1 угл. град.
5. Регистрируют ЭОГ.
6. Измеряют амплитуду ЭОГ ai=156 мкВ.
7. Измеряют время формирования ЭОГ ti=65 мс.
8. Вычисляют нормированную амплитуду ЭОГ
А=ai/an=156/123.5=1,26.
9. Вычисляют нормированное время формирования ЭОГ
Т=ti/tn=65/48=1,35.
10. Вычисляют угол Н поворота глаз в горизонтальной плоскости

11. Вычисляют угол D поворота глаз в диагональной плоскости

12. Вычисляют угол поворота V в вертикальной плоскости

cos D=0.95;
cos Н=0.98;
V=arcos (0.95/0.98)=14,1.
13. Углы Н и V (угл. град) являются координатами той точки поля зрения, на которую направлен взор испытуемого после выполнения саккады. Данная точка смещена относительно центра на 12,8 угл. град по оси Х и на 14,1 градуса по оси Y сферической системы координат.
14. Для перевода координат направления взора из сферической в декартову систему координат вычисляют произведение тангенса найденных углов Н и V на величину L, представляющую собой расстояние (см) от глаз испытуемого до экрана: tg Н=0.23; tg V=0,25.
Tg Н×L=0.23×35=8,1 (см); tg V×L=0.25×35=8,8 (см).
Таким образом, в декартовой системе направление взора испытуемого после выполнения саккады имеет следующие координаты (8,1; 8,8) см.
Источники информации
1. Патент US 5491492, А 61 В 3/14, опубл. 6.06.1995 г.
2. Патент US 5422689, А 61 В 3/14, опубл. 13.02.1996 г.
3. Патент RU №2203608 С2 МПК А 61 В 3/113, опубл. 10.05.2003 г. - прототип.
4. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся ВТУЗов. - 1954. С.192.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЬЮТЕРНЫЙ СПОСОБ КОМПЛЕКСНОЙ ОЦЕНКИ СОСТОЯНИЯ ВЕСТИБУЛЯРНОЙ ФУНКЦИИ, МЕЖСЕНСОРНЫХ ВЗАИМОДЕЙСТВИЙ И СЛЕДЯЩЕЙ ФУНКЦИИ ГЛАЗ | 2005 |
|
RU2307575C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОСТИ ЛЕЧЕНИЯ БОЛЕЗНИ ПАРКИНСОНА | 2004 |
|
RU2285441C2 |
| КОМПЬЮТЕРНЫЙ СПОСОБ ПРОФИЛАКТИКИ И КОРРЕКЦИИ НЕБЛАГОПРИЯТНЫХ ПЕРЦЕПТИВНЫХ И СЕНСОМОТОРНЫХ РЕАКЦИЙ | 2005 |
|
RU2301622C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ДИАГНОСТИКИ ЭКСТРАПИРАМИДНЫХ РАССТРОЙСТВ | 2009 |
|
RU2407425C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОДРОМАЛЬНОЙ СТАДИИ БОЛЕЗНИ ПАРКИНСОНА С ПОМОЩЬЮ ВЫЯВЛЕНИЯ РАННИХ ДВИГАТЕЛЬНЫХ НАРУШЕНИЙ | 2023 |
|
RU2826337C1 |
| СПОСОБ РЕГИСТРАЦИИ ДИСМЕТРИЧНЫХ САККАД | 2022 |
|
RU2802197C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СОДРУЖЕСТВЕННОГО ДВИЖЕНИЯ ГЛАЗ | 2000 |
|
RU2203608C2 |
| СПОСОБ ДИАГНОСТИКИ ПАРАФИЛЬНЫХ РАССТРОЙСТВ С ПРИМЕНЕНИЕМ ТРЕКИНГА ГЛАЗ | 2019 |
|
RU2722056C1 |
| СПОСОБ ДИАГНОСТИКИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2146494C1 |
| СПОСОБ КОНТРОЛЯ КОГНИТИВНОГО ПРОЦЕССА | 2010 |
|
RU2438575C1 |






Изобретение относится к области физиологии и медицины и может быть использовано для определения и записи движения глаз в диагностических процедурах. Для определения траектории движений глаз при саккадических перемещениях взора используют активные электроды, расположенные с темпоральных сторон глазниц на уровне краев глаз. Регистрируют электроокулограмму, отражающую приращения электроокулографических потенциалов (ЭОГ), по которым определяют направление перемещения взора. Измеряют амплитуду и время формирования ЭОГ. Амплитуда ЭОГ отражает перемещение взора в горизонтальной плоскости и соответствует углу Н поворота глаза по оси Х в сферической системе координат. Время формирования ЭОГ соответствует углу D поворота глаз в диагональной плоскости сферической системы координат. С использованием найденных углов Н и D вычисляют угол V поворота глаз в вертикальной плоскости, что соответствует смещению взора по оси Y в сферической системе координат. Углы Н и V являются координатами отображенного на экране переферического стимула, на который направлен взор испытуемого после выполнения саккадического перемещения. Изобретение позволяет устранить ошибки в оценке траектории движений глаз. 4 з.п. ф-лы, 8 ил.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СОДРУЖЕСТВЕННОГО ДВИЖЕНИЯ ГЛАЗ | 2000 |
|
RU2203608C2 |
| СПОСОБ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ ГЛАЗНОГО ЯБЛОКА | 2001 |
|
RU2193337C2 |
| Способ очистки газов от кислых компонентов | 1975 |
|
SU587976A2 |
| JP 2003126039 А, 07.05.2003. | |||

