Изобретение относится к горнолыжному спорту и может найти применение в основном при индивидуальной подгонке горнолыжных ботинок и креплений горных лыж.
Горнолыжные ботинки обычно имеют метку у подошвы, обозначающую усредненную точку приложения составляющей центра тяжести спортсмена, для совмещения ее с меткой лыжи при установке креплений.
Однако в силу определенных обстоятельств, а именно: наклона ботинка, особенностей анатомического строения спортсмена, неправильного подбора ботинок - точки приложения составляющих силы тяжести для каждого спортсмена в определенных ботинках будут индивидуальными и могут существенно отличатся от усредненной метки точки приложения составляющей центра тяжести спортсмена на ботинке.
Известны различные конструкции устройств для определения центра тяжести различных предметов (см. патент РФ №2027169, МПК G 01 M 1/12, опубликован 20.01.1995, патент РФ №2115097, МПК G 01 G 11/00, опубликован 10.07.1998, патент РФ №2224228, МПК G 01 M 1/12, опубликован 20.02.2004), однако они в основном предназначены для определения центра тяжести длинномерных предметов и поэтому малопригодны в случае специфических измерений величины отклонения точки приложения составляющих силы тяжести человека, которую необходимо знать, например, при подгонке ботинок и креплений конкретного спортсмена.
Известно устройство для определения положения центра тяжести пациента (см. заявка РФ №93051830, МПК A 61 B 5/103, опубликована 27.01.1997). Устройство содержит платформу, установленную горизонтально при помощи упругих элементов, на платформе установлены элементы фиксации ступней пациента и источник луча света, передающий сигнал на экран. При смещении проекции центра тяжести относительно центра многоугольника происходит перераспределение веса пациента на упругие элементы, платформа отклоняется в сторону отклонения проекции центра тяжести, соответственно отклоняется луч света на экране. Для передачи светового сигнала на вертикальный экран используется элемент с зеркальной поверхностью, установленный на пути луча и отклоняющий его на 90°. По второму варианту исполнения источник луча света установлен в центре экрана, а элемент с зеркальной поверхностью закреплен на краю платформы.
Известное устройство позволяет фиксировать лишь отклонение центра тяжести пациента от заданного, но не может обеспечить получения количественных данных об отклонении проекции центра тяжести. Кроме того, использование источника света требует затенения помещения для эффективной эксплуатации устройства.
Наиболее близким по назначению и совокупности существенных признаков к заявляемому устройству является устройство для определения продольного движения центра тяжести горизонтально лежащего человека (см. патент Великобритании №1498516, МПК G 01 M 1/14, А 61 В 5/11, опубликован 18.01.1978), включающее подпружиненную платформу для поддержки человека в горизонтальном положении, одной стороной закрепленную на основании посредством горизонтального стержневого шарнира и снабженную на противоположной стороне датчиком нагрузки. Датчик нагрузки подключен к процессору для получения сигнала от датчика нагрузки, который, в свою очередь, соединен с прибором для регистрации сигнала процессора.
Известное устройство-прототип обеспечивает получение количественных характеристик продольного движения центра тяжести горизонтально лежащего человека, но не позволяет регистрировать отклонение центра тяжести в поперечном направлении, что ограничивает область его применения.
Задачей заявляемого изобретения являлась разработка такого устройства для определения положения центра тяжести человека, которое бы обеспечивало получение количественных характеристик отклонения положения центра тяжести как в продольном, так и в поперечном направлении.
Поставленная задача решается тем, что устройство для определения положения центра тяжести человека включает основание, грузовую платформу для размещения на ней человека, установленную на основании, по меньшей мере три датчика нагрузки, из которых по меньшей мере два датчика нагрузки расположены под платформой у одной ее кромки и по меньшей мере один датчик нагрузки расположен под платформой у кромки, противолежащей первой, а также по меньшей мере одно устройство для измерения и регистрации выходного сигнала по меньшей мере одного датчика нагрузки.
Снабжение устройства не менее тремя датчиками нагрузки, два из которых расположены под платформой у передней или задней ее кромки, а не менее чем один датчик установлен у противоположной кромки платформы, позволяет определять количественную величину отклонения центра тяжести как в продольном, так и в поперечном направлении, что значительно расширяет область применения устройства. В частности, с помощью заявляемого устройства оказывается возможным производить подгонку снаряжения (ботинок и креплений) горнолыжника.
Под платформой могут быть установлены четыре датчика нагрузки. В этом случае датчики располагаются попарно у передней и задней кромок платформы (например, под углами четырехугольной платформы).
Для снижения нагрузки платформы на датчики платформа может быть подпружинена.
Основание устройства может быть снабжено регулируемыми по высоте опорами, расположенными попарно у противоположных краев основания, и двумя уровнями для точной установки основания в горизонтальной плоскости. Уровни целесообразно устанавливать на боковой поверхности основания, но они могут быть также установлены и на верхней поверхности платформы.
Для удобства фиксирования положения ступни или ботинка на верхней поверхности грузовой платформы может быть установлен один или два упора, которые могут быть снабжены линейкой со шкалой.
Верхняя поверхность грузовой платформы может быть снабжена двумя дополнительными упорами, перпендикулярными первому упору и установленными на платформе с возможностью возвратно-поступательного перемещения в направлении, параллельном первому упору. Каждый из этих дополнительных упоров может быть также снабжен линейкой со шкалой.
Грузовая платформа может быть выполнена в виде двух одинаковых площадок, при этом каждая площадка снабжается четырьмя расположенными по ее углам датчиками нагрузки и одним неподвижным и одним подвижным упорами.
В устройстве датчики нагрузки могут быть выполнены, например, в виде тензодатчиков, в качестве которых могут быть использованы пьезоэлектрические датчики.
В качестве устройства для измерения и регистрации выходного сигнала датчика нагрузки может быть использовано любое известное устройство. Например, электронные весы, процессор или персональный компьютер.
Изобретение поясняется чертежами, где
на фиг.1 изображен вид сверху на заявляемое устройство с грузовой платформой в виде одной площадки, установленной на 4 датчика нагрузки;
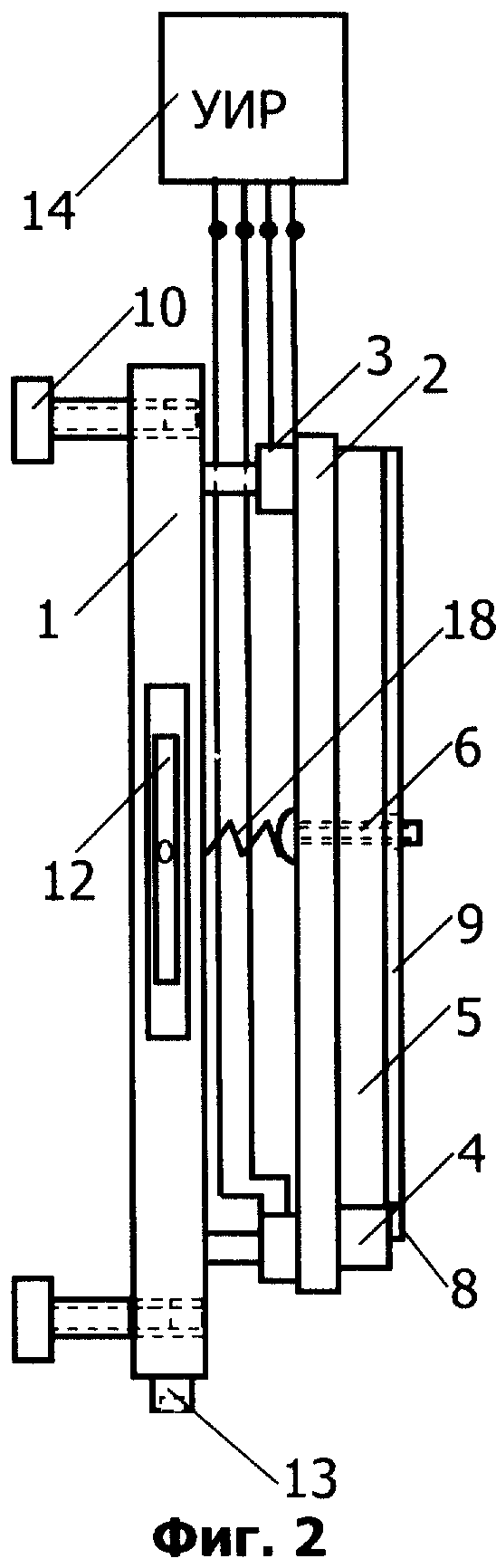
на фиг.2 показан вид сбоку на устройство, изображенное на фиг.1;
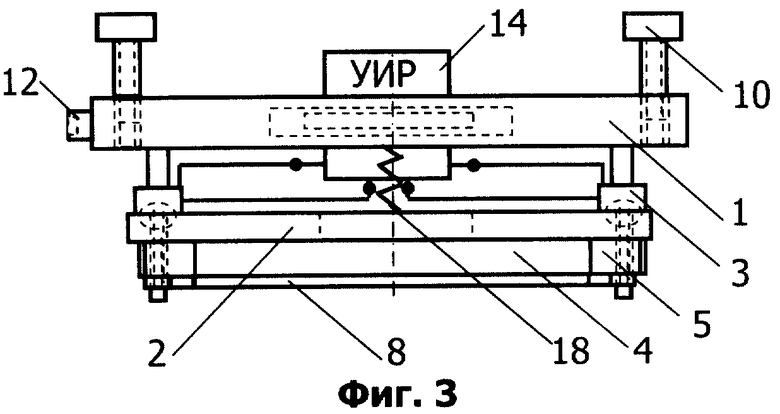
на фиг.3 приведен вид спереди на устройство, изображенное на фиг.1;
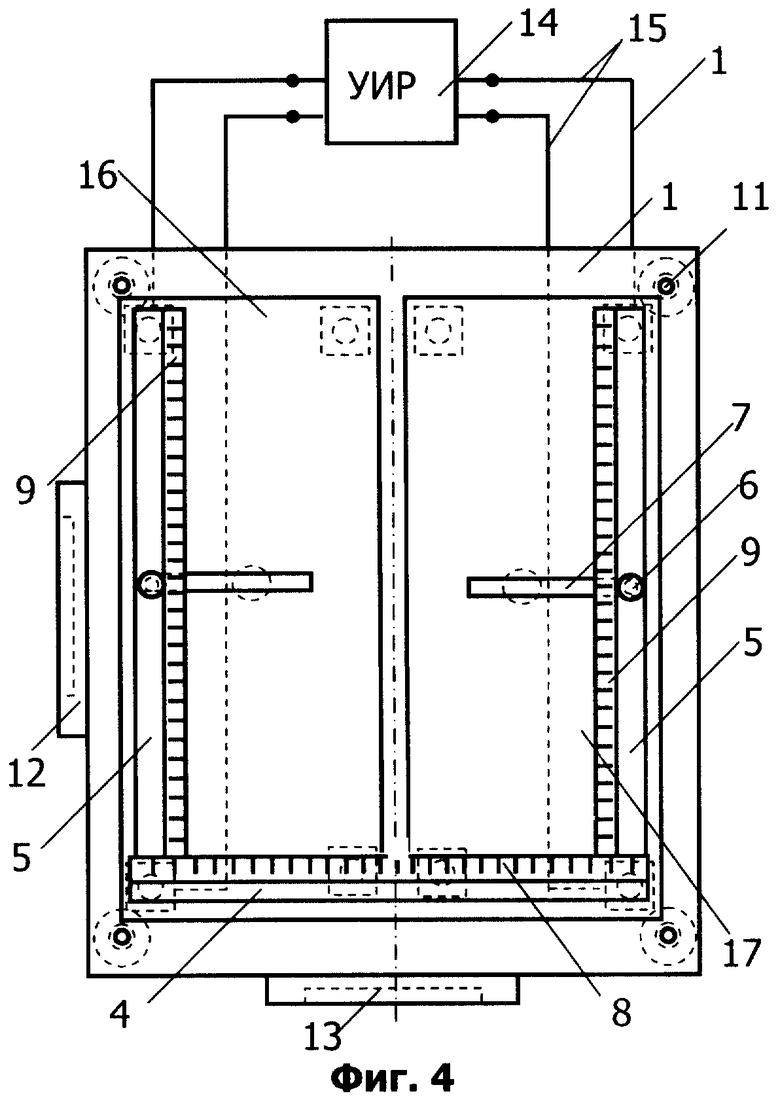
на фиг.4 изображен вид сверху на заявляемое устройство с грузовой платформой в виде двух одинаковых площадок;
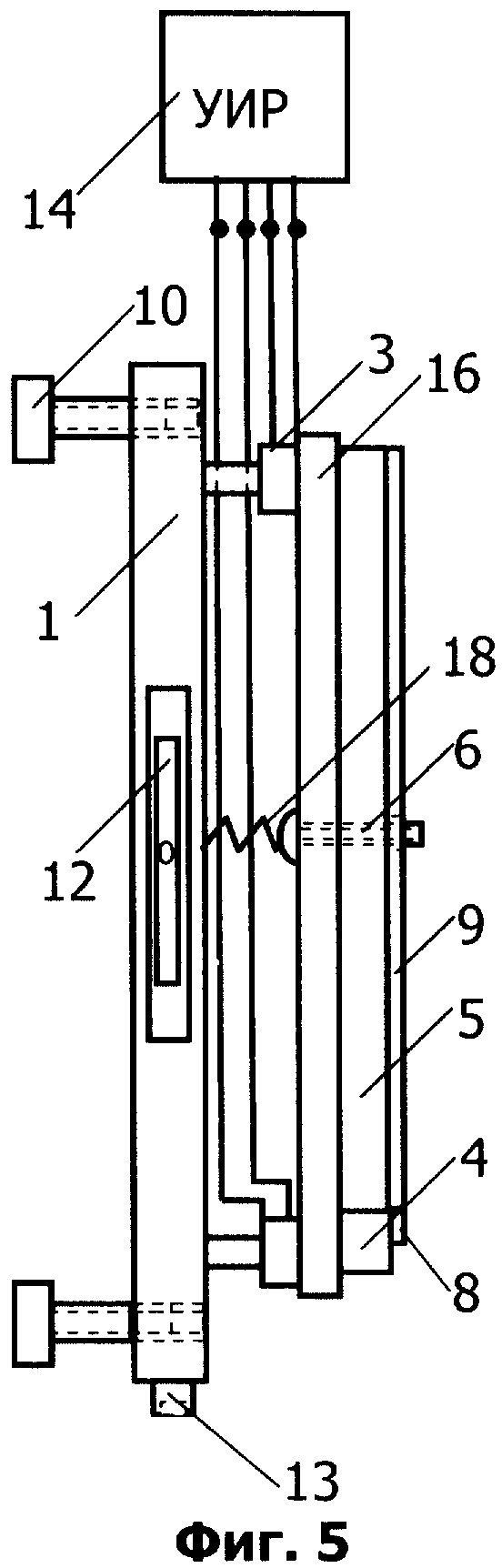
на фиг.5 показан вид сбоку на устройство, изображенное на фиг.4;
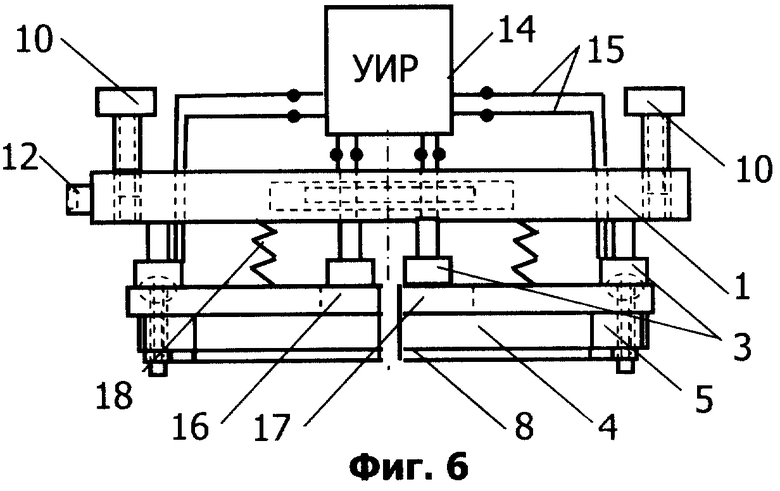
на фиг.6 приведен вид спереди на устройство, изображенное на фиг.4;
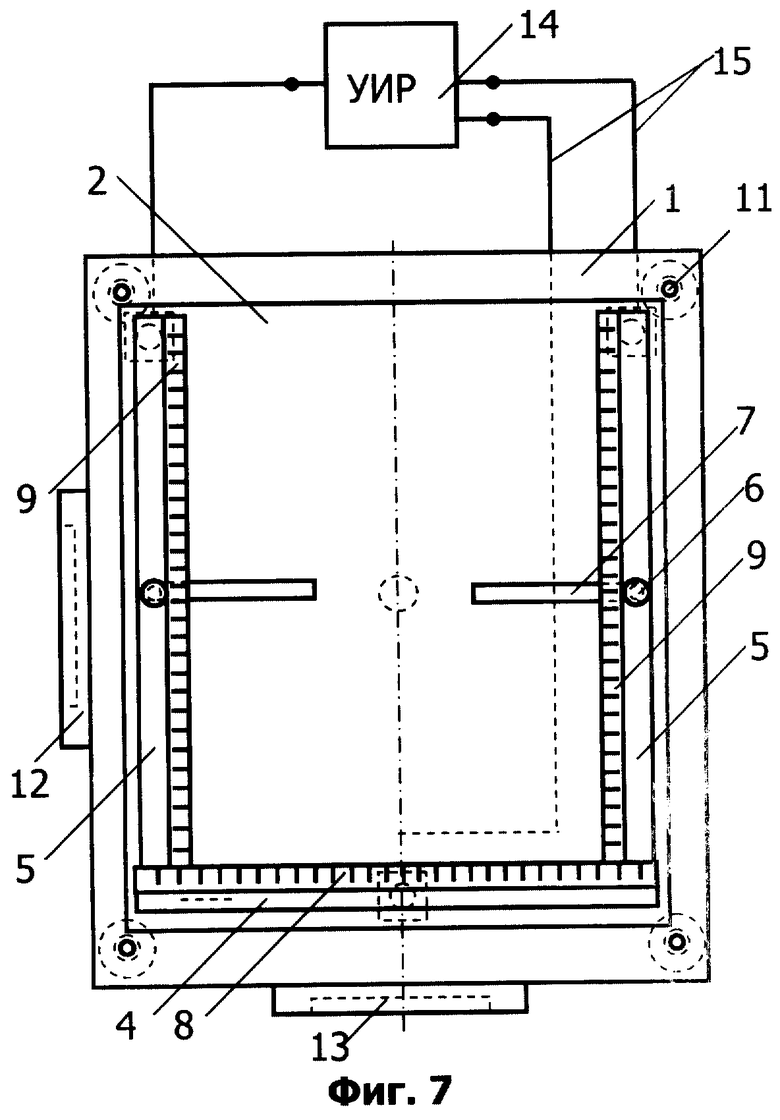
на фиг.7 изображен вид сверху на заявляемое устройство с грузовой платформой в виде одной площадки, установленной на 3 датчика нагрузки;
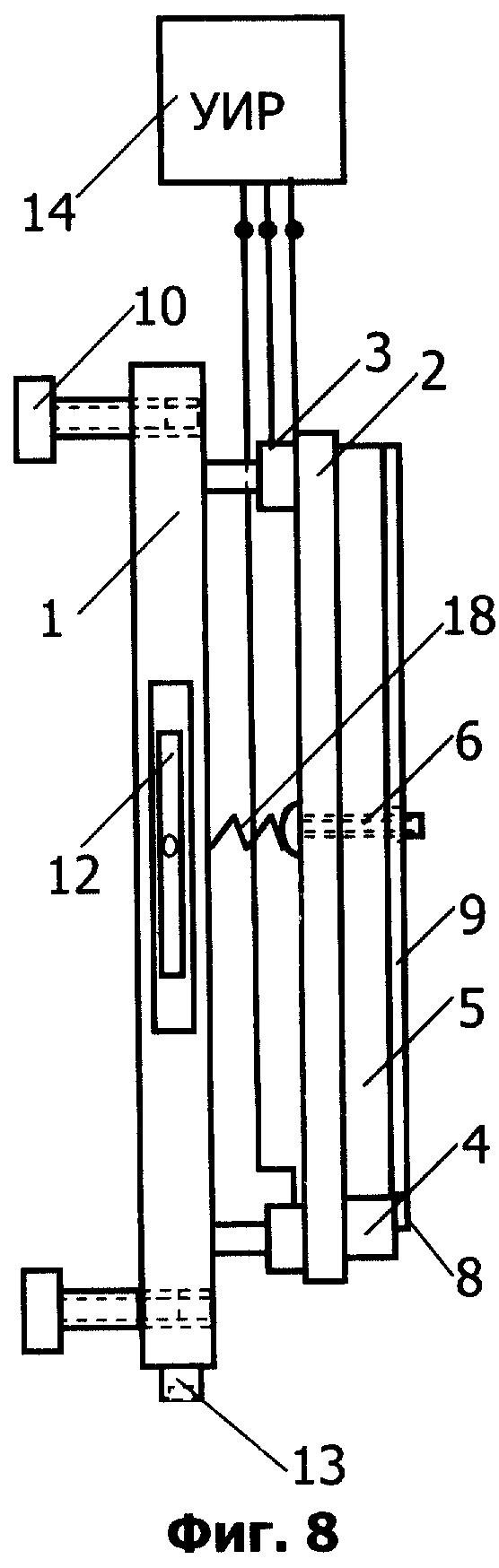
на фиг.8 показан вид сбоку на устройство, изображенное на фиг.7;
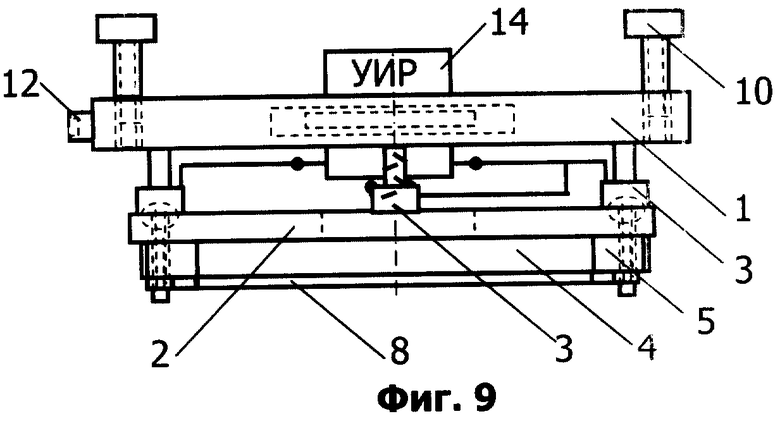
на фиг.9 приведен вид спереди на устройство, изображенное на фиг.7.
Изображенное на фиг.1 устройство для определения положения центра тяжести человека включает основание 1, грузовую платформу 2 для размещения на ней человека, установленную на основании 1, четыре датчика нагрузки 3, расположенные попарно у передней и задней кромки грузовой платформы 2 (см. фиг.2). В качестве датчиков нагрузки 3 могут быть использованы, например, тензодатчики, в частности пьезоэлектрические датчики. При этом целесообразно датчики 3 каждой пары устанавливать симметрично относительно продольной оси устройства (см. фиг.3). У задней кромки грузовой платформы 2 на ее верхней поверхности закреплен упор 4 для фиксации положения ступни человека или задника ботинка горнолыжника. Упор 4 может быть закреплен и у передней кромки грузовой платформы 2. В этом случае фиксируется положение носка ботинка. На верхней поверхности грузовой платформы 2 по обе стороны от продольно оси устройства установлены два упора 5 для фиксации продольного положения ступни человека или положения внешних или внутренних боковин ботинок. Упоры 5 установлены на грузовой платформе 2 с возможностью возвратно-поступательного перемещения в направлении, параллельном упору 4, например, с помощью зажимов 6, перемещаемых в пазах 7. Зажимы 6 могут быть, например, выполнены в виде винта с широкой головкой и гайки или в виде любой другой известной конструкции. Для упрощения снятия результатов измерений на упоре 4 закреплена линейка 8 со шкалой, например, метрической, а на упорах 5 закреплены соответственно линейки 9, также снабженные шкалой, например, метрической. Основание 1 может быть снабжено регулируемыми по высоте упорами 10, расположенными попарно у противоположных краев основания 1. Упоры 10 могут быть выполнены, например, в виде винтов, перемещающихся при их вращении в снабженных резьбой отверстиях 11 в основании 1. Для контроля установки основания 1 в строго горизонтальное положение оно может быть снабжено двумя уровнями 12 и 13, установленными, например, на боковой поверхности основания 1. Датчики нагрузки 3 подключены к устройству 14 для измерения и регистрации выходного сигнала с датчиков 3, например, проводами 15. В качестве устройства 14 могут быть использованы, например, электронные весы, процессор или персональный компьютер, снабженные блоком преобразования сигнала, например АЦП. В другом варианте исполнения каждый датчик 3 может быть снабжен индивидуальным устройством 14. Грузовая платформа 2 может быть выполнена в виде двух одинаковых площадок 16 и 17 (см. фиг.4, фиг.5 и фиг.6), каждая из которых устанавливается на основании 1 посредством четырех датчиков 3 и снабжается упором 4. Такое выполнение устройства позволяет осуществлять подгонку каждого горнолыжного ботинка спортсмена как в продольном, так и в поперечном направлении. Грузовая платформа 2 подпружинена относительно основания 1, например, одной (см. фиг.1) или несколькими (см. фиг.4) пружинами 18. Грузовая платформа 2 может (см. фиг.7, фиг.8 и фиг.9) устанавливаться на основании 1 посредством трех датчиков 3. В этом случае два датчика 3 размещают у одной кромки платформы 2, а третий датчик размещают у противоположной кромки, желательно на продольной оси платформы 2. Грузовая платформа 2 подпружинена относительно основания 1, например, одной (см. фиг.1) или несколькими (см. фиг.4) пружинами 18.
Характеристики пружин 18 подбирают таким образом, чтобы скомпенсировать вес платформы 2.
Устройство для определения положения центра тяжести человека работает следующим образом. Предварительно осуществляют градуировку датчиков нагрузки 3 грузами определенного веса, устанавливаемых в различных точках платформы 2. Человек (например, спортсмен в горнолыжных ботинках) встает на жесткую платформу 2 (см. фиг.1) таким образом, чтобы пятки или носки упирались в упор 4, а ступни располагались параллельно друг другу, прилегая сбоку к упорам 5, положение которых регулируют и фиксируют зажимами 6 под индивидуальную стойку спортсмена. В условиях статического равновесия при отклонении центра тяжести спортсмена в продольном направлении от центра платформы 2 подошвы горнолыжных ботинок давят, например, в области пяток с силой F1, приложенной к задней паре датчиков нагрузки 3 и с силой F2 в области носков, приложенной к передней паре датчиков 3. При этом влияние отклонения центра тяжести в поперечном направлении компенсируется сложением сигналов от каждой пары датчиков нагрузки 3. Центр тяжести будет расположен в продольном направлении на расстоянии R1 от линии, проходящей через заднюю пару датчиков 3 и R2 от линии, проходящей через переднюю пару датчиков 3. Обозначив расстояние между этими парами датчиков 3 через R3, условия статического равновесия платформы со стоящим на ней спортсменом будут иметь вид:
F1·R1-F2·R2=0;
R2=R3-R1.
Т.е. пятки ботинок создают момент F1·R1, направленный против часовой стрелки относительно центра тяжести, а носки ботинок создают отрицательный момент F2·R2, направленный по часовой стрелке относительно центра тяжести.
Разрешив эти равенства относительно R1, получим
R1=F2·R3/(F1+F2).
Значения R1, R2 и R3 в простейшем варианте устройства определяют, используя линейки 9 на упорах 5, а показания датчиков нагрузки 3 считывают с устройства 14.
Аналогичным образом производят определение отклонения центра тяжести в поперечном направлении платформы 2. В этом случае предварительно определяют расстояние R'3 между парами датчиков 3, расположенными у одной и другой продольной стороны платформы 2, показания F'1 и F'2 снимают суммированием сигналов пар датчиков нагрузки 3, расположенных соответственно у одной и другой продольной стороны платформы 2.
Устройство с платформой 2 в виде двух одинаковых площадок 16 и 17 используют, когда необходимо добавочно определить величины момента, вызванного индивидуальными особенностями строения ноги человека и действующего на подошву в плоскости, перпендикулярной продольной оси стопы. В этом случае предварительно определяют расстояние R"3 между парами датчиков нагрузки 3, расположенных соответственно у одной и другой продольной стороны соответственно площадок 16 и 17 платформы 2. Показания F"1 и F"2 для каждой подошвы снимают суммированием сигналов каждой пары датчиков нагрузки 3. Отклонение центра тяжести в продольном направлении определяют этим устройством так, как рассмотрено выше, только показания F1 и F2 снимают суммированием сигналов четырех датчиков нагрузки 3, расположенных соответственно у задних и передних сторон площадок 16 и 17 платформы 2.
При использовании в качестве устройства 14 процессора или персонального компьютера все вычисления осуществляют на основе заданной программы, устанавливая предварительно значения R3, R'3 и R"3 для конкретного человека.
Получаемые при помощи заявляемого устройства данные использовались, в частности, для разметки места установки креплений на горные лыжи, а также для регулировки и подгонки голенищ горнолыжных ботинок.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТОЧКИ ПРИЛОЖЕНИЯ ДАВЛЕНИЯ ЧЕЛОВЕКА В СПОРТИВНОЙ ОБУВИ | 2008 |
|
RU2376934C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЦЕНТРА ДАВЛЕНИЯ ЧЕЛОВЕКА В СПОРТИВНОЙ ОБУВИ | 2007 |
|
RU2344757C1 |
| КОНЕК | 1992 |
|
RU2049507C1 |
| Устройство для тренировки горнолыжников | 1987 |
|
SU1493272A1 |
| СПОРТИВНЫЙ БОТИНОК, В ЧАСТНОСТИ ЛЫЖНЫЙ БОТИНОК | 2003 |
|
RU2296493C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ГОРНОЛЫЖНИКОВ | 1991 |
|
RU2011394C1 |
| СНОУБОРД | 2007 |
|
RU2344864C2 |
| ПРОТЕЗ СТУПНИ, СИСТЕМА ИЗ ПРОТЕЗА СТУПНИ И БОТИНКА, А ТАКЖЕ СПОСОБ ПОДГОНКИ ВЫСОТЫ КАБЛУКА ПРОТЕЗА СТУПНИ | 2015 |
|
RU2686292C2 |
| Горнолыжное крепление | 1980 |
|
SU955967A1 |
| ТРЕНАЖЕР ДЛЯ ГОРНОЛЫЖНИКОВ | 2021 |
|
RU2757660C1 |
Изобретение относится к медицинской технике, а также к горнолыжному спорту, и может найти применение как для коррекции осанки человека, так и при индивидуальной подгонке горнолыжных ботинок и креплений горных лыж. Устройство для определения положения центра тяжести человека включает основание, грузовую платформу для размещения на ней человека, установленную на упомянутом основании, по меньшей мере, три датчика нагрузки, а также, по меньшей мере, одно устройство для измерения и регистрации выходного сигнала, по меньшей мере, одного датчика нагрузки. По меньшей мере, два датчика нагрузки расположены под платформой у одной ее кромки и, по меньшей мере, один датчик нагрузки расположен под платформой у кромки, противолежащей первой. Технический результат - получение количественных характеристик отклонения положения центра тяжести как в продольном, так и в поперечном направлении. 15 з.п. ф-лы, 9 ил.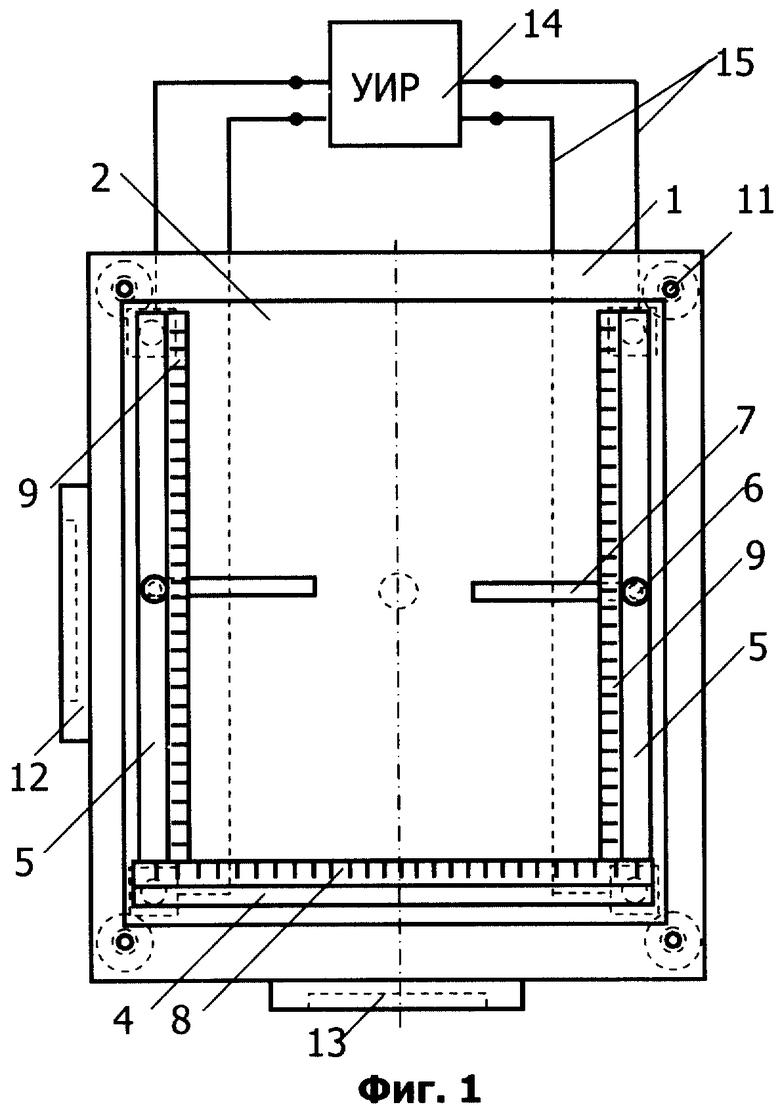
| Спринклер | 1987 |
|
SU1498516A1 |
| Устройство для регистрации параметров движения центра тяжести тела человека | 1975 |
|
SU561556A1 |
| US 5609162 A, 11.03.1997 | |||
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ РАСПРЕДЕЛЕНИЯ ЦЕНТРА ТЯЖЕСТИ ЧЕЛОВЕКА | 2000 |
|
RU2195171C2 |

