Изобретение относится к медицине, в частности к офтальмологии, и может быть использовано для определения подвижности глазного протеза при анофтальме.
Среди показателей эффективности глазного протезирования главным является подвижность глазного протеза.
Наиболее близким по технической сущности и достигаемому результату является способ определения подвижности глазного протеза (Патент РФ №2173116, МПК7 A 61 F 2/14; G 01 B 5/004, опубликованный 10.09.2001 г.) путем определения максимального отклонения глазного протеза по четырем главным меридианам с помощью измерительной указки, крепящейся непосредственно к глазному протезу, определяют проекцию центра вращения глазного протеза на височную область (М), как точку пересечения проекций оси протеза в максимальных отклонениях последнего в вертикальном меридиане, затем от центра вращения глазного протеза точки М определяют расстояние d по выбранной точке С, лежащей на оси протеза и совмещенной с концом указки. После этого от выбранной точки С производят линейное измерение максимального отклонения конца указки по четырем главным меридианам a1, а2, а3, а4, а углы максимального отклонения глазного протеза α1, α2, α3, α4 в каждом меридиане рассчитывают по следующей формуле:
 .
.
При всех достоинствах известного способа следует отметить недостаточно высокую точность и объективность в определении подвижности глазного протеза.
Техническим результатом, на достижение которого направлено создание данного изобретения, является повышение эффективности лечения после операционного анофтальма, снижение погрешности измерения и повышение объективности оценки подвижности глазного протеза.
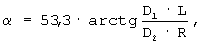
Поставленный технический результат достигается тем, что в способе определения подвижности глазного протеза, основанном на определении линейного отклонения глазного протеза по четырем главным меридианам, - производят фотосъемку глазного протеза пациента при взгляде прямо перед собой и при одном из крайних отведениях глазного протеза: влево, вправо, вверх или вниз, на каждом из двух полученных фотоизображениях при взгляде прямо и в крайнем отведении глазного протеза устанавливают метки на линии, проходящей через центр зрачка глазного протеза, по краю роговицы или зрачка, или в центре зрачка, далее накладывают два полученных фотоизображения друг на друга, совмещая изображения на них по границам глазной щели, затем на полученном совмещенном фотоизображении производят линейное измерение отрезка, ограниченного установленными ранее на фотоизображениях метками, и определяют угол отклонения глазного протеза по формуле:
где:
α - угол отклонения глазного протеза в каждом из крайних отведений (град);
L - длина отрезка, ограниченного двумя метками, полученного при совмещении двух фотоизображений глазного протеза при взгляде прямо и при крайнем отведении: влево, вправо, вверх или вниз (мм);
D1 - диаметр роговицы здорового глаза пациента (мм);
D2 - диаметр роговицы на фотоизображении (мм);
R - радиус глазного яблока здорового глаза пациента (мм);
53,3 - коэффициент перевода радиан в градусы.
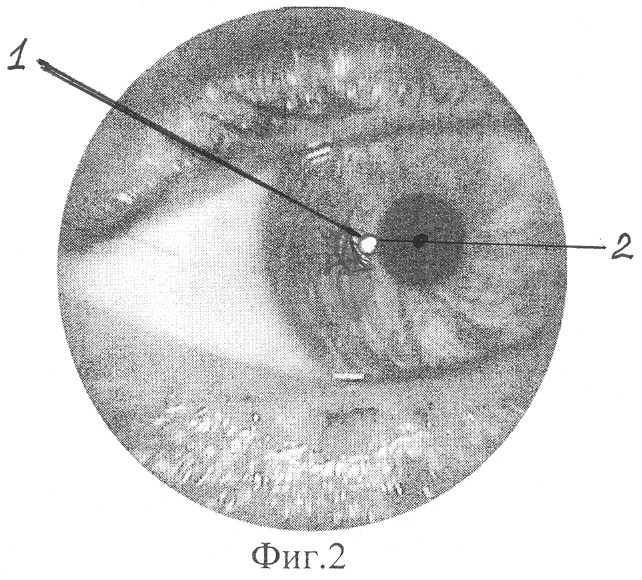
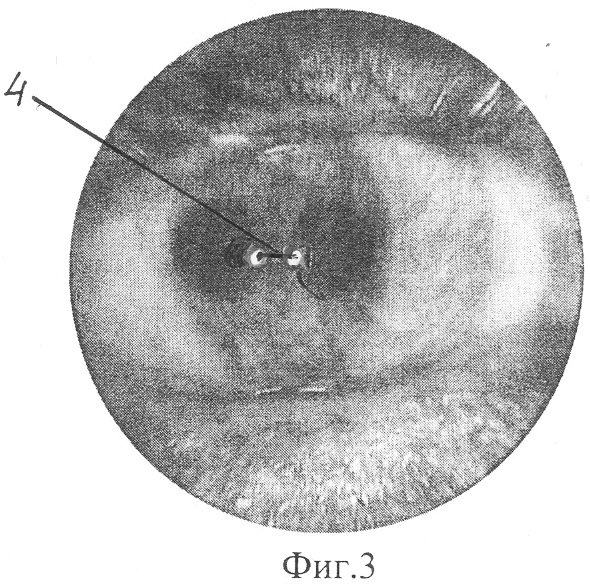
На фиг.1 представлено изображение глазного протеза при взгляде прямо перед собой; на фиг.2 - то же при взгляде влево; на фиг.3 представлено фотоизображение при совмещении двух фотоизображений глазного протеза при взгляде прямо перед собой и взгляде влево.
Способ определения подвижности глазного протеза осуществляют следующим образом.
Пациента, сидящего перед установкой, включающей в себя фундус камеру «Opton», видеокамеру «Panasonic», устройство сопряжения и персональный компьютер, просят посмотреть в объектив прямо перед собой, а затем налево. Далее через видеокамеру загружают полученные фотоизображения (фиг.1, 2) в персональный компьютер. Используя приложение MS Adobe Photochop, устанавливают на линии 2, проходящей через центр зрачка 3 глазного протеза, метки 1, например, по краю зрачка 3 (фиг.1, 2).
Далее накладывают полученные изображения глазного протеза (фиг.1, 2) друг на друга, совмещая изображения по границам глазной щели.
На полученном совмещенном фотоизображении (фиг.3) производят линейные измерения отрезка 4, ограниченного установленными ранее на фотоизображениях (фиг.1, 2) метками 1.
Затем определяют угол отклонения глазного протеза по формуле
где:
α - угол отклонения глазного протеза в каждом из крайних отведений (град);
L - длина отрезка, ограниченного двумя метками, полученного при совмещении двух фотоизображений глазного протеза при взгляде прямо и при крайнем отведении: влево, вправо, вверх или вниз (мм);
D1 - диаметр роговицы здорового глаза пациента (мм);
D2 - диаметр роговицы на фотоизображении (мм);
R - радиус глазного яблока здорового глаза пациента (мм);
53,3 - коэффициент перевода радиан в градусы.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявляемого изобретения, позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными (идентичными) всем существенным признакам заявляемого изобретения.
Определение из перечня аналогов наиболее близкого технического решения (прототипа) позволило выявить совокупность существенных по отношению к усматриваемому техническому результату отличительных признаков в заявляемом изобретении «Способ определения подвижности глазного протеза».
Следовательно, заявляемое изобретение соответствует критерию «новизна».
Заявляемое изобретение не вытекает для специалиста явным образом из известного уровня техники, не выявлено влияние предусматриваемых существенными признаками заявляемого изобретения преобразований для достижения поставленного технического результата.
Следовательно, заявляемое изобретение соответствует критерию «изобретательский уровень».
Критерий «промышленная применимость» подтверждается тем, что способ определения подвижности глазного протеза может быть эффективно использован в офтальмологии для оценки эффективности хирургического лечения при ношении глазного протеза при анофтальме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОДВИЖНОСТИ ОПОРНО-ДВИГАТЕЛЬНОЙ КУЛЬТИ ДЛЯ ГЛАЗНОГО ПРОТЕЗА | 2000 |
|
RU2192203C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОДВИЖНОСТИ ГЛАЗНОГО ПРОТЕЗА | 1999 |
|
RU2173116C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОДВИЖНОСТИ И СПОСОБ ОЦЕНКИ ПОДВИЖНОСТИ ПАРНОГО ГЛАЗА, ОПОРНО-ДВИГАТЕЛЬНОЙ КУЛЬТИ И ГЛАЗНОГО КОСМЕТИЧЕСКОГО ПРОТЕЗА | 2014 |
|
RU2569162C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ОБЪЕМА ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ СИМБЛЕФАРОНА | 2005 |
|
RU2275844C1 |
| СПОСОБ НЕИНВАЗИВНОЙ КЛИНИЧЕСКОЙ ПРИЖИЗНЕННОЙ ОЦЕНКИ СОСТОЯНИЯ ОРБИТАЛЬНОГО ИМПЛАНТАТА И ОКРУЖАЮЩИХ ЕГО ТКАНЕЙ | 2006 |
|
RU2309679C1 |
| СПОСОБ ФИКСАЦИИ ГЛАЗНОГО ПРОТЕЗА К ОПОРНО-ДВИГАТЕЛЬНОЙ КУЛЬТЕ | 2012 |
|
RU2482824C1 |
| УСТРОЙСТВО ДЛЯ КОМПЛЕКСНОГО ИЗМЕРЕНИЯ НАРУЖНЫХ ПАРАМЕТРОВ ОРБИТЫ И ПРИДАТОЧНОГО АППАРАТА ГЛАЗА | 2000 |
|
RU2173081C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПОРНО-ДВИГАТЕЛЬНОЙ КУЛЬТИ ГЛАЗА С ПОСЛЕДУЮЩЕЙ КОСМЕТИЧЕСКОЙ КОРРЕКЦИЕЙ | 2000 |
|
RU2184513C1 |
| СПОСОБ ОТСРОЧЕННОЙ ПЛАСТИКИ ОПОРНО-ДВИГАТЕЛЬНОЙ КУЛЬТИ ПОСЛЕ ТРАДИЦИОННОЙ ЭВИСЦЕРАЦИИ | 2011 |
|
RU2469686C1 |
| Способ перфузии стекловидного тела | 1984 |
|
SU1261654A1 |
Изобретение относится к медицине, в частности к офтальмологии, и может быть использовано для определения подвижности глазного протеза при анофтальме. При определении подвижности глазного протеза определяют линейное отклонение глазного протеза по четырем главным меридианам. Производят фотосъемку глазного протеза пациента при взгляде прямо перед собой и при одном из крайних отведений глазного протеза: влево, вправо, вверх или вниз. На каждом из двух полученных фотоизображений при взгляде прямо и в крайнем отведении глазного протеза устанавливают метки на линии, проходящей через центр зрачка глазного протеза, по краю роговицы или зрачка, или в центре зрачка. Накладывают два полученных фотоизображения друг на друга, совмещая изображения на них по границам глазной щели. На полученном совмещенном фотоизображении производят линейное измерение отрезка, ограниченного установленными ранее на фотоизображениях метками. Определяют угол отклонения глазного протеза по формуле: α=53,3·arctg (d1·L/D2·R), где α - угол отклонения глазного протеза в каждом из крайних отведений (град); L - длина отрезка, ограниченного двумя метками, полученного при совмещении двух фотоизображений глазного протеза при взгляде прямо и при крайнем отведении: влево, вправо, вверх или вниз (мм); D1 - диаметр роговицы здорового глаза пациента (мм); D2 - диаметр роговицы на фотоизображении (мм); R - радиус глазного яблока здорового глаза пациента (мм); 53,3 - коэффициент перевода радиан в градусы. Изобретение позволяет повысить эффективность лечения послеоперационного анофтальма, снизить погрешность измерения и повысить объективность оценки подвижности глазного протеза. 3 ил.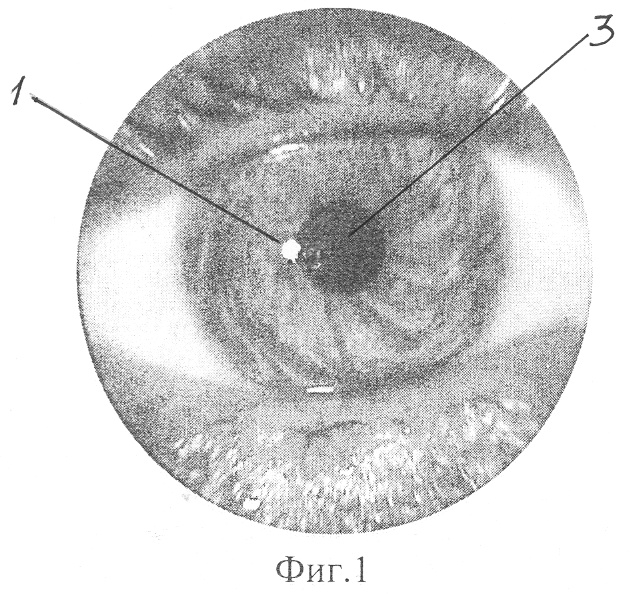
Способ определения подвижности глазного протеза, основанный на определении линейного отклонения глазного протеза по четырем главным меридианам, отличающийся тем, что производят фотосъемку глазного протеза пациента при взгляде прямо перед собой и при одном из крайних отведений глазного протеза: влево, вправо, вверх или вниз, на каждом из двух полученных фотоизображениях при взгляде прямо и в крайнем отведении глазного протеза устанавливают метки на линии, проходящей через центр зрачка глазного протеза, по краю роговицы или зрачка, или в центре зрачка, далее накладывают два полученных фотоизображения друг на друга, совмещая изображения на них по границам глазной щели, затем на полученном совмещенном фотоизображении производят линейное измерение отрезка, ограниченного установленными ранее на фотоизображениях метками, и определяют угол отклонения глазного протеза по формуле:
где α - угол отклонения глазного протеза в каждом из крайних отведений (град);
L - длина отрезка, ограниченного двумя метками, полученного при совмещении двух фотоизображений глазного протеза при взгляде прямо и при крайнем отведении: влево, вправо, вверх или вниз (мм);
D1 - диаметр роговицы здорового глаза пациента (мм);
D2 - диаметр роговицы на фотоизображении (мм);
R - радиус глазного яблока здорового глаза пациента (мм);
53,3 - коэффициент перевода радиан в градусы.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОДВИЖНОСТИ ГЛАЗНОГО ПРОТЕЗА | 1999 |
|
RU2173116C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОДВИЖНОСТИ ОПОРНО-ДВИГАТЕЛЬНОЙ КУЛЬТИ ДЛЯ ГЛАЗНОГО ПРОТЕЗА | 2000 |
|
RU2192203C2 |
| RU 2173115 C1, 10.09.2001 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

