Изобретение относится к областям радиотехники, инфокоммуникационных технологий, техники обработки информации, техники высокоточных пространственно-временных измерений. Изобретение может быть использовано для создания пространственно-временных систем реального времени с высокостабильной синхронизацией времени и частоты на глобальных масштабах расстояний для обеспечения высокоточными измерениями всех процессов происходящих в пространстве в режиме реального времени.
Сегодня для решения задач определения местоположения и времени наиболее эффективным методом является организация глобальных, региональных и локальных измерительных систем, которые создаются радиоинтерферометрическими сетями со сверхдлинными базами (РСДБ), средствами космической геодезии с помощью космических навигационных систем GPS и ГЛОНАСС, лазерной локации ИСЗ и Луны (SLR и LLR), доплеровскими радиотехническими системами (DORIS и PRARE).
Различные подходы к решению проблемы синхронизации времени описаны в опубликованных отечественных и зарубежных патентах. Так, например, в патенте РФ №2040035 [1], предлагается способ синхронизации часов для сличения шкал времени, разнесенных на большие расстояния. При этом для повышения оперативности результатов сличения удаленных шкал времени этим способом предусматривается, что перед началом сеанса передачи шкал времени осуществляют измерение значений временных задержек в передающей и приемной аппаратуре первой А и второй В станций, определение разности значений временных задержек в передающей и приемной аппаратуре первой и второй станций. В начальный момент времени по часам первой станции А с помощью кодовой последовательности формируют шумовой сигнал СВЧ на частоте fc=fпр и регистрируют его на этой же станции. Сформированный сигнал задерживают по времени на величину разности значений временных задержек в передающей и приемной аппаратуре первой станции А и задержанный сигнал преобразуют на частоту f=fпр. Преобразованный сигнал усиливают по мощности, излучают усиленный сигнал в направлении на искусственный спутник Земли (ИСЗ)-ретранслятор, принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте f1, переизлучают его в станцию В на частоте f2 с сохранением фазовых соотношений на интервале времени tc, принимают ретранслированный сигнал в станции В. Достигаемая при этом степень синхронизации не отвечает современным требованиям.
В другом патенте РФ №2177167 [2] описано устройство, которое содержит геостационарный ИСЗ-ретранслятор, первую и вторую наземные станции. Каждая наземная станция содержит эталон времени и частоты, генератор псевдошумового сигнала и аналоговый и цифровой дескремблеры. Генератор псевдошумового сигнала каждой станции содержит аналоговый и цифровой скремблеры. Такая схема устройства обеспечивает сличение шкал времени удаленных друг от друга наземных станций, а также позволяет осуществлять обмен конфиденциальной аналоговой и дискретной информацией с защитой от несанкционированного доступа, однако она не решает проблемы высокоточной синхронизации времени.
В патенте США №5717404 [3] делается попытка решить вторую сторону проблемы, а именно определение местоположения объекта в пространстве с использованием ИСЗ. Однако отсутствие решения проблемы синхронизации времени и здесь резко снижает степень точности определения местоположения.
Шкалы времени и частоты создаются на базе эталонных систем времени и частот, сигналы которых распространяются соответствующими национальными и международными службами.
Геодезические данные, навигационные сигналы и сигналы точного времени доставляются к потребителю с использованием всех видов связи.
Для всех систем космической геодезии является характерной задержка по времени между измерениями и получением и использованием результатов пользователями. Величина задержки зависит от времени, необходимого для сбора глобальных данных, их обработки, анализа и передачи пользователям. Задержка является различной для различных систем и может достигать величины от нескольких суток до нескольких месяцев. За этот период времени параметры системы изменяются и на текущий момент пользователю предоставляются параметры о прошлом состоянии системы или в лучшем случае прогноз состояния с погрешностью, зависящей от интервала времени прошедшего от момента измерений до настоящего момента. Это ограничивает точность пространственно-временных измерений и синхронизации шкал времени и частоты.
Пространственно-временная система реального времени (ПВС РВ) представляет собой взаимоувязанную, иерархическую инфраструктуру средств, которые создают условия высокоточной синхронизации времени и частоты на глобальных расстояниях и возможность высокоточных непрерывных пространственно-временных измерений на поверхности Земли, в воздушном и космическом пространстве.
ПВС РВ может использоваться в интересах решения задач, удовлетворяющих современным требованиям инфокоммуникаций, информатизации, единства измерений в реальном времени, контроля, управления экономическими и социальными системами и в других сферах человеческой деятельности.
Каркасом Пространственно-временной системы реального времени является сеть глобальной высокоскоростной телекоммуникационной системы со скоростью передачи данных до десятков терабит в секунду.
Она должна включать в себя:
а. олигархическую синхронную сеть (ОСС), интегрального цифрового обслуживания, содержащую узловые магистральные центры коммутации и синхронизации (УМЦКС);
b. опорные наземные станции ПВС РВ, являющиеся элементами радиоинтерферометрии со сверхдлинными базами (РСДБ), которые используют когерентные сигналы от внегалактических источников и содержат постоянно синхронизируемые частотно-временные эталоны;
с. систему комплексирования технических средств ПВС РВ с национальным эталоном времени и частоты, радиоастрономо-геодезической сетью, космическими навигационными системами ГЛОНАСС, GPS, GALILEO, фазовыми и импульсно-фазовыми радионавигационными системами, системами радиолокации и радиоуправления, сетями мобильной связи, системами частотно-временной синхронизации и локализации, вторичными эталонными базами времени и частоты, инфокоммуникационными сетями, объединенную в единую систему магистральными, волоконно-оптическими, спутниковыми и другими каналами связи.
На момент подачи заявки основу высокоточных определений местоположений составляют следующие взаимоувязанные технологии:
- радиоинтерферометрия со сверхдлинными базами (РСДБ, VLBI);
- космическая навигационная система GPS;
- система лазерной локации ИСЗ (SLR);
- система лазерной локации Луны (LLR);
- доплеровская система измерений орбит ИСЗ (DORIS).
Анализируя данные указанных систем, Международная служба параметров вращения Земли формирует и публикует данные о Международной земной опорной системе координат (ITRF), параметрах вращения Земли (ЕОР) относительно Международной небесной опорной системы координат (ICRF), в виде бюллетеня, содержащего параметры систем, полученные за различные прошедшие периоды измерений и прогноз параметров вращения Земли на будущее.
Пользователь по своим геодезическим координатам и прогнозу параметров вращения Земли может определить свое положение относительно небесной системы координат.
В связи со стремительным развитием глобальных оптоволоконных систем связи, мировым сообществом активно изучаются прорывные технологии РСДБ с целью перехода к оперативному применению этой самой высокоточной технологии определения местоположения на глобальных масштабах.
Практическое использование РСДБ-технологии для решения частной задачи по глобальной синхронизации систем телекоммуникаций описано в патенте РФ №2166234 «Глобальная высокоскоростная телекоммуникационная система» [4]. Это решение является наиболее близким к заявляемому изобретению, поскольку включает основные элементы предлагаемой идеи создания пространственно-временной системы, которая позволяет решать более общую задачу по пространственно-временным измерениям в реальном времени. Решение, описанное в [4], предусматривает использование метода когерентного приема и обработки сигналов от внегалактических источников на основе радиоинтерферометрических измерений со сверхдлинными базами (РСДБ). При этом предусматривается функциональное объединение глобальной сети РСДБ, выполняющей роль базовой системы фундаментального пространственно-временного обеспечения (ФПВО), и олигархической синхронной сети (ОСС) интегрального обслуживания путем размещения узловых магистральных центров коммутации и синхронизации глобальной сети на опорных станциях сетей РСДБ, входящих в базовую систему ФПВО, интеграция технических средств и создание единой системы магистральных каналов для передачи в режиме реального времени цифровых потоков данных.
На приведенной блок-схеме (Фиг.1) показано взаимодействие глобальной системы телекоммуникаций и глобальной системы частотно-временной синхронизации, обеспечивающее решение поставленной технической задачи. При этом использованы следующие сокращения:
1 - МВОСК, т.е. международная внегалактическая опорная система координат;
2 - МЗОСК, т.е. международная, земная опорная система координат;
3 - КНС, т.е. космическая навигационная система;
4 - СЛНС, т.е. система лазерных наблюдений спутников;
5 - ДСН, т.е. доплеровская система наблюдений;
6 - СЧВС, т.е. система частотно-временной синхронизации;
7 - ОСС, т.е. олигархическая синхронная система;
8 - СИЦО, т.е. система интегрального цифрового обслуживания;
9 - РСДБ, т.е. радиоинтерферометрия со сверхдлинными базами;
10 - ФПВО, т.е. базовая система фундаментального пространственно-временного обеспечения;
11 - УМЦКС, т.е. узловой магистральный центр коммутации и синхронизации.
На Фиг.1 не показаны, но в дальнейшем используются также сокращенные наименования таких элементов, как СПКВИ, что означает систему передачи координатно-временной информации, ЦКОД, что означает центр корреляционной обработки данных, а также СПД, т.е. система передачи данных;
В то время, как решение [4] касается лишь временной составляющей пространственно-временной системы, заявляемое изобретение решает задачу увязки, как точного времени, так и пространственных определений любого объекта, как на Земле, так и в космосе.
Технический результат достигается за счет создания процесса непрерывных радиоинтерферометрических измерений, их корреляционной обработки, самокалибровки элементов глобального радиотелескопа в реальном времени и непрерывной передачи пользователям пространственно-временной информации в реальном времени (ПВС РВ).
В упрощенном изложении, ПВС РВ - это многофункциональный глобальный радиотелескоп, созданный на основе технологии РСДБ, в котором все измерения выполняются и используются в режиме реального времени. Глобальный радиотелескоп непрерывно воспроизводит свои технические параметры, геодезические координаты, синхронизированные шкалы атомного времени и самокалибруется в результате наблюдений внегалактических радиоисточников. Он объединяет в себе функции глобальной, фундаментальной радиоастрономо-геодезической опорной сети, группового распределенного хранителя атомного времени и частоты и пространственно-временные системы для решения прикладных задач различного назначения. Положение и параметры движения всех объектов измеряются относительно опорного пространственно-временного базиса высшей точности, задаваемого элементами (станциями РСДБ) глобального радиотелескопа. Принципиальным отличием ПВС РВ является непрерывное выполнение измерений, обработки, анализа результатов и передача их пользователям в едином технологическом цикле, организованном с помощью аппаратуры и методов, являющихся предметом данного изобретения. Пространственно - временной базис формируется и используется на основе текущих результатов измерений, в то время как во всех существовавших до настоящего изобретения в системах космической геодезии используются данные прогноза состояния системы.
ПВС РВ во всей ее совокупности систем, аппаратуры, методов и математического и программного обеспечения является принципиальной основой единства измерений для всех видов научной, оборонной и прикладной деятельности. Существующие и будущие системы инфокоммуникаций, космической и наземной геодезии, системы радионавигации, радиолокации, радиоуправления и других пространственно-измерительных систем могут использовать пространственно - временной базис ПВС РВ в режиме реального времени для решения своих задач от метрологической поверки и калибровки параметров до непосредственных высокоточных измерений и предоставления услуг пользователям. ПВС РВ объединяет:
- систему фундаментального пространственно-временного обеспечения (ФПВО) на базе сетей РСДБ реального времени, закрепляющую радиоастрономо-геодезическую сеть высшей точности и альтернативную групповую шкалу атомного времени сетей РСДБ в качестве опорной пространственно-временной системы отсчета,
- сеть РСДБ-станций для распространения пространственно-временного базиса для решения прикладных задач различного назначения в интересах пользователей,
- систему технических средств комплексирования с системами спутниковой и оптической связи всех ведомств, космическими навигационными системами ГЛОНАСС, GPS, GALILEO, фазовыми и импульсно-фазовыми радионавигационными системами, системами радиолокации и радиоуправления, сетями мобильной связи, системами частотно-временной синхронизации и локализации, геоинфокоммуникационными сетями.
Алгоритм функционирования ПВС РВ состоит в следующем:
- Задают программу комплексу, образующему глобальный радиотелескоп, непрерывно воспроизводить свои технические параметры, геодезические координаты, синхронизированные шкалы атомного времени станций РСДБ и осуществлять самокалибровку в результате наблюдений внегалактических радиоисточников, что позволяет формировать, поддерживать и развивать опорную пространственно-временную систему отсчета высшей точности на поверхности Земли.
Распространяют высокоточный базис пользователям путем функционального включения их РСДБ-станций в совместные измерения по внегалактическим источникам для определения геодезических координат и синхронизации времени и частоты дополнительных станций относительно опорной пространственно-временной системы отсчета.
- Осуществляют обмен данными по высокоскоростным каналам систем связи и передачи информации.
- Измеряют параметры орбит и сличают шкалы времени и частоты ИСЗ и космических аппаратов (КА) различного назначения относительно опорного базиса пространственно - временной системы в абсолютном или дифференциальном режиме РСДБ-наблюдений.
- Формируют высокоточную динамическую пространственно-временную систему отсчета космического базирования, связанную с наземной опорной пространственно-временной системой отсчета реального времени.
- Формируют и распространяют суммарный цифровой сигнал всех РСДБ-станций пространственно-временной системы, обеспечивая пользователей возможностью работы в режиме компаунд-интерферометра для самоопределения своего местоположения и синхронизации времени и частоты относительно опорной пространственно-временной системы отсчета. Любая РСДБ-станция пользователей может теперь образовывать двухэлементный компаунд-интерферометр с синхронизованной РСДБ-системой ПВС РВ, работающей в режиме фазированной решетки глобальных размеров с суммарной, эффективной площадью, равной сумме эффективных площадей всех входящих в нее радиотелескопов.
- Распространяют пространственно-временные параметры и сигналы точного времени и частоты с помощью всех средств фиксированной и подвижной связи.
- Непрерывно обеспечивают всех конечных государственных, частных и индивидуальных потребителей через все виды связи высокоточными пространственно-временными параметрами и сигналами, времени и частоты для высокоточных определений местоположения и движения объектов научного, хозяйственного и военного назначения на поверхности Земли, в воздушном и космическом пространстве, на море и под водой.
На Фиг.2 показана примерная схема взаимодействия различных элементов ПВС РВ, где размещенные на определенной территории, т.е. на сверхдлинной базе, радиотелескопы 12 осуществляют наблюдение внегалактических источников - квазаров 14. При этом входящие в систему радиотелескопы связаны с единым коррелятором 13, обеспечивающим коррекцию погрешностей наблюдения, и имеют возможность передачи данных по различным каналам связи, как наземным, так и с использованием спутников связи 16.
При реализации изложенной идеи одним из основных устройств ПВС РВ, будет являться радиоинтерферометр со сверхдлинными базами (РСДБ). Он задает пространственно-временную систему отсчета, постоянно воспроизводит и распространяет опорный пространственно-временной базис на основе непрерывных, последовательных наблюдений более 700 внегалактических источников небесной инерциальной системы в режиме реального времени.
К основным задачам ПВС РВ относятся:
- построение высокоточной радиоастрономо-геодезической сети;
- взаимное увязывание высокоточных систем отсчета: небесной, инерциальной, земной и динамической;
- определение параметров взаимной ориентации (параметров вращения Земли) этих систем и их мониторинг;
- мониторинг движения точек земной коры (локальные и глобальные деформации);
- уточнение параметров Солнечной системы;
- установление высокоточной атомной шкалы времени, организация синхронизации времени и частоты на глобальных расстояниях
- установление связи между радиоастрономической инерциальной системой координат и оптической.
- распространение земной системы координат на любую точку земной поверхности;
- распространение шкалы атомного времени.
- навигация космических аппаратов в ближнем и дальнем космосе;
- баллистическое обеспечение глобальных навигационных систем;
и других задач позиционирования, навигации и синхронизации.
Основными преимуществами являются:
- гарантированная высшая точность пространственно-временных определений, базирующаяся на многолетних рядах радиоастрономических измерений взаимных угловых положений 700 естественных точечных внегалактических радиоисточников, не имеющих собственных движений, с помощью глобальной наземной РСДБ-системы, обладающей максимально достижимой пространственно-временной разрешающей способностью;
- доступность, гарантированная видимостью внегалактических радиоисточников с поверхности Земли в радиодиапазоне в любое время суток и при любых погодных условиях, а также широким спектром их излучения;
- контроль целостности ПВС, являющейся в высшей степени инерционной и долговечной, обеспечивается за счет возможности высокоточного непрерывного анализа ее параметров, контроля и управления системой и устойчивого прогнозирования ее будущего состояния;
- непрерывность функционирования системы ПВС гарантируется непрерывностью излучения радиосигналов вечными внегалактическими источниками, большим количеством приемных радиотелескопов и синхронизаторов эшелонированной и резервированной РСДБ-системы и системы хранения альтернативной групповой шкалы атомного времени ПВСРВ.
Главными отличиями заявляемой системы от аналогов и прототипа являются следующие моменты:
- Основные наблюдаемые величины измеряются непосредственно в ходе наблюдений. А именно, задержка по времени между наблюдением внегалактического источника и получением основных наблюдаемых величин составляет, обычно, величину около 15 дней, и кроме длительности самого наблюдения включает затраты времени на транспортировку магнитных носителей и на корреляционную обработку, которая в несколько раз превышала время записи данных в результате наблюдений РСДБ. В заявляемой системе реального времени результаты обработки наблюдений РСДБ получаются без задержки, то есть непосредственно в ходе наблюдения в виде текущих значений наблюдаемых величин, получаемых в виде последовательности дискретных значений, следующих через половину интервала единичного наблюдения;
- интервал наблюдения оптимизируется по двум параметрам: допустимой статистической погрешности измерения основных наблюдаемых величин и собственному интервалу (по Котельникову/Найквисту) флуктуаций задержки распространения в среде и инструментальных флуктуаций в аппаратуре станций РСДБ;
- коррекция всех инструментальных погрешностей при этом выполняется без дополнительных затрат времени в результате процедур, выполняемых параллельно с измерением кросскорреляционных функций;
- корректирующие поправки основных наблюдаемых величин в виде разностей между истинными и предвычисленными модельными значениями используются на РСДБ-станциях в цепях обратной связи для реализации следящей системы для минимизации погрешностей измерений. А именно, ошибки синхронизации времени и частоты передаются на каждый станция РСДБ в виде поправок к значениям опорной частоты 5 МГц и сигнала времени 1 с, что позволяет с помощью исполнительных устройств синхронизовать РСДБ-систему с минимальными погрешностями в режиме реального времени. Кроме того, эти же погрешности используются для формирования суммарного сигнала опорной РСДБ-системы в режиме компаунд-интерферометра. Прикладной пространственно-временной базис ПВС формируется путем периодического включения в состав сети РСДБ антенн (радиотелескопов) меньшего диаметра или подвижных антенн, оснащенных средствами для проведения измерений на РСДБ-системе.
ПВС РВ сможет распространять свой пространственно-временной базис в едином цикле измерений с помощью мобильных малогабаритных инфокоммуникационных систем и не нуждается в дополнительных системах сличения шкал времени и частоты, как это необходимо для систем космического базирования.
Пространственно-временной базис систем космического базирования может формироваться путем измерения текущих координат, параметров орбит и сличения шкал времени и частоты космических объектов средствами ПВС РВ относительно базиса ПВС РВ в беззапросном, бескодовом режиме.
ПВС РВ является самокалибрующейся системой, она не нуждается в знании навигационных и временных параметров других систем и может, с помощью своего пространственно-временного базиса, повысить качество решений задач, которые сегодня решаются: космическими навигационными системами ГЛОНАСС, GPS, GALILEO; фазовыми и импульсно-фазовыми радионавигационными системами; системами радиолокации и радиоуправления; сетями мобильной связи для позиционирования абонентов; системами частотно-временной синхронизации и локализации; геоинфокоммуникационными сетями.
Таким образом, ПВС РВ является:
- глобальной технической системой отсчета пространственных измерений положений и реального времени, интегрирующей все имеющиеся технические средства пространственно-временных измерений и инфокоммуникаций,
- основой единства пространственно-временных измерений от масштабов микромира до космологических,
- материальным воплощением категорий пространства и времени, в которых происходит движение материи во всех формах ее существования.
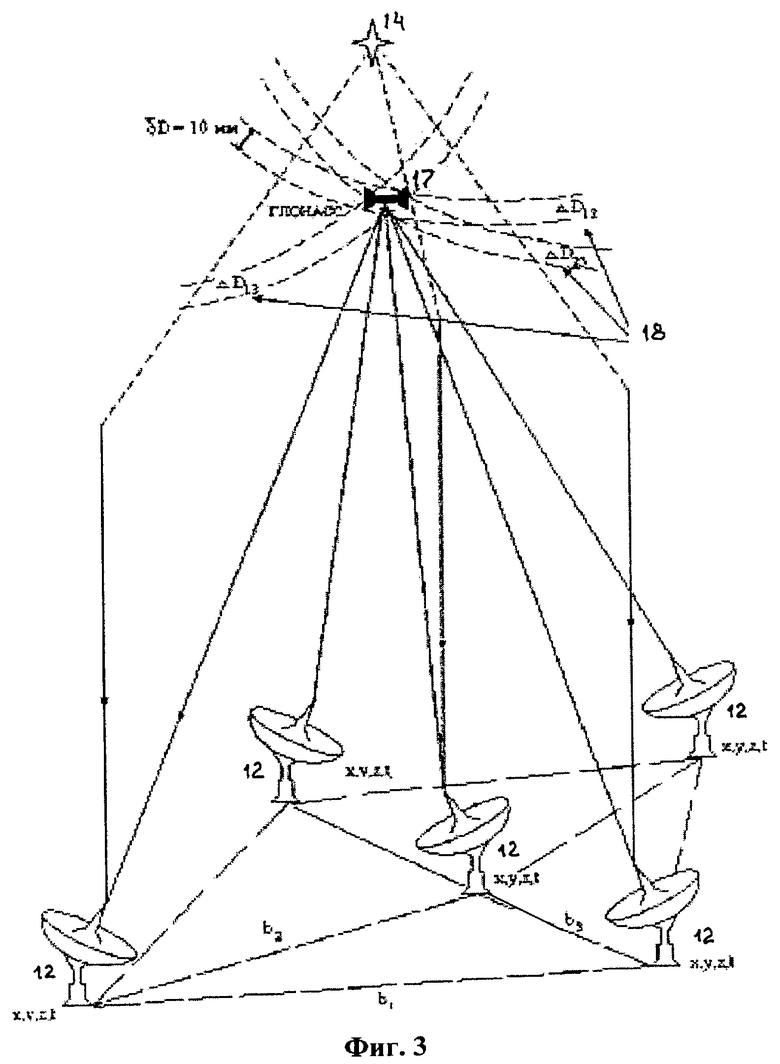
На Фиг.3 для примера приведена измерительная схема дифференциальной разностно-дальномерной РСДБ-системы.
Системы телекоммуникаций и всех видов связи синхронизируются по времени и частоте на основе базиса ПВС РВ с воспроизведением точности, определяемой ПВС РВ.
Распространение высокоточного пространственно-временного базиса ПВС обеспечит повышение производительности современных высокоскоростных систем телекоммуникаций и связи и защиту от несанкционированного доступа.
Преимуществами создаваемой инфокомуникационной системы на базе ПВС РВ являются:
- глобальная синхронизация магистральных узлов коммутации и управления с наивысшей точностью, повышение пропускной способности существующих магистральных систем связи;
- экономия средств на создание ведомственных и иных дублирующих систем координатно-временного и навигационного обеспечения и систем синхронизации магистральных сетей связи;
- непрерывное повышение точности синхронизации по мере развития пространственно-временного базиса ПВС РВ;
- независимость и безопасность эксплуатации, основанной на использовании национальной пространственно-временной системы в сочетании с возможностью международной интеграции систем связи;
- сохранение возможностей интегрального цифрового обслуживания по передаче данных, созданию частных каналов связи, использования телекоммуникационных услуг Frame Relay, ATM, ISDN, Managed Service, Remote LAN Dial и других.
Современные синхронные оптоволоконные магистральные системы спектрального уплотнения DWDM со скоростями передачи данных выше 10 Гбит/с в каждом частотном канале и агрегированной скоростью выше 10 Тбит/с являются чувствительными к точности частот настройки лазеров, нарушению когерентности преобразований сигналов в каскадированных мультиплексорах, демультиплексорах и фильтрах. Повышение когерентности таких систем в целом является актуальной задачей, поскольку позволяет эффективно снижать число регенераторов и усилителей оптического сигнала, снижать мощность и ее запас в оптических генераторах и улучшать эксплуатационные характеристики элементов оптических каналов передачи (точка-точка) и сетей связи в целом. Актуальность задачи повышается с учетом появления на рынке оптических систем связи системы с временным оптическим разделением каналов (OTDM), которые требуют самой высокоточной синхронизации времени и частоты.
Что касается теоретических принципов, на которых основано заявляемое изобретение, то следует учесть, что соответствии с теорией электродинамики и распространения электромагнитных волн, ширина диаграммы направленности радиотелескопа пропорциональна длине волны излучения и обратно пропорциональна максимальному размеру апертуры. Формально, это означает, что глобальный радиотелескоп с линейным размером апертуры, равным среднему диаметру Земли 12,742 тысяч километров, в радиодиапазоне может формировать диаграмму направленности с шириной от 0,5 секунды дуги на длине волны 30 метров до 0,05 миллисекунды дуги на длине волны 3 миллиметра. Такой радиотелескоп будет обладать соответствующим пространственным угловым разрешением по критерию Рэлея той же величины.
В соответствии с классификацией антенн радиодиапазона РСДБ-система является корреляционной антенной решеткой с апертурой, синтезируемой в процессе вращения Земли.
Полноповоротная рефлекторная параболическая антенна является стандартным элементом РСДБ-системы и наиболее распространенной конструкцией радиотелескопа,
В обобщенной схеме глобального радиотелескопа, являющегося обобщенной моделью РСДБ-системы, обязательным элементом является корреляционный спецпроцессор, который выполняет следующие основные функции, замещающие эквивалентные функции одиночного радиотелескопа:
- формирует каркас главного зеркала;
- обеспечивает пространственное сопровождение источника;
- измеряет дисперсию входного сигнала глобального радиотелескопа.
Упрощение модели глобального радиотелескопа касается двух отличий:
- апертура главного зеркала заполнена частично;
- "панели" динамически перемещаются по формообразующей поверхности главного зеркала в результате вращения Земли и изменения положения их проекций, а также проекций линий баз на плоскость, перпендикулярную направлению на источник.
Обобщенный подход основан на представлении радиоастрономической технологии РСДБ измерения пространственной когерентности полей в качестве частного решения общей задачи извлечения информации о свойствах, положении и движении различных объектов в пространстве, осматриваемом с помощью электромагнитных волн различных диапазонов. Эти волны излучаются объектами в следующих возможных условиях.
- Самопроизвольно (пассивный метод радиолокации) - естественные источники излучения: квазары, космические мазеры, радиозвезды, пульсары и другие источники.
- Специальными излучателями (беззапросный метод) - космические аппараты дальнего космоса, навигационные ИСЗ, спутники дистанционного космического зондирования.
- Образуются в результате отражения от объектов зондирующих колебаний, излучаемых самой станцией (активный метод радиолокации), так, например, функционирует бистатический радиолокатор в приемопередающем режиме зондирования естественных объектов (планет, спутников планет, астероидов, комет, метеороидов) и летательных аппаратов.
- Образуются в результате отражения зондирующих сигналов со стороны (полуактивный метод радиолокации), известный как моностатический радиолокатор с разделением функций передачи и приема между разными станциями или радиолокационный интерферометр.
- Переизлучаются установленным на объекте ответчиком с приходом запросных сигналов от станции (активный ответ), примером может служить использование космических аппаратов и ИСЗ.
Основополагающий принцип относительных измерений координат и их производных состоит в том, что аналогом дальности R является время запаздывания τп=R/c сигнала между приемником и передатчиком, аналогом радиальной скорости VR - доплеровский сдвиг частот fd принимаемого сигнала, аналогом направляющего косинуса VR - разность времен запаздывания Δτg=(R1-R2)/c и аналогом производной направляющих косинусов - разность доплеровских частот сигналов Δfd, принимаемых в разнесенных точках приема.
Никакие другие принципы измерения относительных координат объектов и их производных в измерительных радиосистемах не используются.
Относительные положения объектов их производные определяются в точке пересечения поверхностей положения в многомерной измерительной системе.
РСДБ-система по принципу измерения является разностно-дальномерной, поскольку в ней основными измеряемыми параметрами являются геометрическая задержка распространения, и ее производные, однозначно связанные с разностью хода лучей от источника до приемных антенн, то есть разностью дальностей.
Наблюдения на РСДБ-системе внегалактических источников с известными координатами позволяют измерить параметры баз РСДБ, их ориентацию относительно опорной небесной системы координат ICRF и измерить разность часов станций РСДБ. Таким образом, выполняют комплексную калибровку параметров РСДБ-системы. Разности дальностей или геометрические задержки распространения измеряют относительно плоскости, перпендикулярной к направлению на источник, и проходящей через опорную станцию РСДБ при астрофизических исследованиях или через геоцентр при астрометрических исследованиях.
Положение исследуемых объектов, находящихся в дальней зоне РСДБ-системы, измеряют в дифференциальном режиме в виде разности угловых векторов положений объектов относительно координат опорных внегалактических радиоисточников.
Положение объектов, находящихся в ближней зоне РСДБ-системы, измеряют также в дифференциальном режиме, но гиперболическим методом в виде трех измерений вектора положения объекта их производных с помощью сети РСДБ, откалиброванной по внегалактическим радиоисточникам, находящимся на близких угловых расстояниях. Разности дальностей или геометрические задержки распространения в этом случае измеряют относительно сферической поверхности, проходящей через опорную станцию РСДБ и центр которой совпадает с вектором положения исследуемого объекта. Важно отметить, что
- при дифференциальных наблюдениях на РСДБ-системе объектов на фоне внегалактических источников знания ПВЗ не требуется,
- влияние атмосферы и ионосферы на измерение положений объектов на фоне внегалактических источников минимизируется, поскольку вносят одинаковый вклад в их положения.
Но при наблюдениях на РСДБ-системе объектов в абсолютном режиме требуется знание параметров вращения Земли (ПВЗ) и параметров атмосферы и ионосферы.
Таким образом, для объектов, находящихся в дальней зоне, РСДБ-система является чисто угломерной, то есть фронт волны излучения источника является плоским и разность дальностей однозначно связана с соответствующими углами между каждой из баз РСДБ-системы и направлением на источник. Для объектов в ближней зоне фронт волны имеет сферическую форму и РСДБ-система уже не является чисто угломерной. Для ближней зоны разности дальностей для каждой базы РСДБ-системы теперь связываются с линиями положения источника (геометрическим местом точек), которые для разностно-дальномерной системы являются гиперболами для измерений в плоскости.
Для трехмерного пространства геометрическим местом точек являются гиперболические поверхности (гиперболоид), образованные путем вращения гипербол вокруг каждой из базовых линий. Для ближней зоны положение источника может быть определено с помощью 2-х элементной РСДБ-системы путем последовательных измерений при различных позиционных углах, то есть в результате последовательного синтеза трехмерной РСДБ-системы. Однозначное направление на источник может быть измерено в результате единичного измерения при использовании 3-х элементной РСДБ-системы. Мгновенное (текущее) положение источника в ближней зоне однозначно связано с трехмерными координатами станций РСДБ, если РСДБ-система состоит не менее чем из 4-х антенн. Полный вектор состояния объекта получается в результате серии непрерывных измерений разности дальностей.
Погрешности измерений положений объектов для разностно-дальномерной РСДБ зависят от погрешностей координат станций РСДБ, параметров баз, синхронизации часов, влияния атмосферы и ионосферы и инструментальных эффектов. Совместные наблюдения внегалактических источников с известными координатами и объектов в ближней зоне позволяют откалибровать положение всех баз РСДБ-системы относительно избранного внегалактического радиоисточника или группы источников из каталога ICRF, синхронизовать часы станций и устранить эффекты распространения и инструментальные эффекты. Погрешности измерений будут зависеть от точности калибровки и времени ее действия, которое зависит от углового расстояния между опорным квазаром и исследуемым объектом, от точности модели вращения Земли и ее прогноза на интервал времени между смежными калибровочными процедурами наблюдений опорных объектов. Погрешности калибровки являются минимальными, если наблюдения проводятся в совмещенной измерительной системе, позволяющей параллельно вести измерения опорных квазаров и исследуемых объектов.
Возможны два способа использования опорных объектов для калибровки положения баз РСДБ-системы:
- с помощью оперативного прогноза параметров ориентации Земли ЕОР относительно ICRS на момент наблюдений и привязки координат станций РСДБ к опорной геодезической системе координат ITRS,
- с помощью дифференциальных наблюдений исследуемых объектов относительно квазаров, находящихся на близких угловых расстояниях.
Представленная на Фиг.3 схема применяется для управления полетами космических аппаратов (КА) дальнего космоса в американской доплеровской сети слежения DSN NASA (Deep Space Network) в составе трех антенн в Голдстоуне (США), Мадриде (Испания) и Канберре (Австралия) в оперативном режиме. Она, частично, решает те же задачи, что и ПВС РВ. Система DSN проводит измерения доплеровских смещений частоты и фазы сигналов КА в дифференциальном режиме относительно внегалактических источников 14, находящихся на близких угловых расстояниях. РСДБ-наблюдения внегалактических источников проводятся в оперативном режиме с передачей данных по низкоскоростным коммутируемым каналам в центр обработки в Годдардовском Центре управления полетами Goddard Space Flight Center (GSFC).
В отличие от DSN NASA в заявляемой системе текущие координаты, параметры орбиты и поправки времени и частоты космических аппаратов, навигационных спутников космической навигационной системы ГЛОНАСС или других систем определяют по их навигационным сигналам в дифференциальном бескодовом режиме разностно-дальномерным методом (гиперболическим) с помощью системы РСДБ и внегалактических источников - квазаров. Положение ИСЗ определяют в точке пересечения гиперболических поверхностей (гиперболоидов), образованных относительно баз РСДБ b1, b2, b3, b4.
При использовании прогноза ЕОР погрешности калибровки положения баз РСДБ полностью определяются погрешностями действующего прогноза, который зависит от времени, прошедшего от начала последних измерений ЕОР и по данным IERS. В соответствии с этими данными суточный прогноз приводит к минимально достижимому значению случайной ошибки параметров баз РСДБ-системы и их ориентации около 5 см для станций РСДБ вблизи экватора Земли. Через месяц эта ошибка возрастает до полуметра. Кроме ошибки, связанной с прогнозом ЕОР, при данном методе необходимо специальными измерениями учитывать все погрешности распространения, инструментальные погрешности, отдельно синхронизовать часы станций РСДБ, таким образом, данный вид измерений может быть отнесен к методу абсолютных измерений.
При дифференциальном методе измерений погрешности определяются точностью наблюдений опорного объекта, то есть с точностью 0,00001 угловой секунды дуги и 1 см по разности дальностей, и метод может быть отнесен к методу относительных измерений.
Для всех остальных известных схем пространственно-временных измерений РСДБ-система также, и главным образом, позволяет с максимальной точностью измерять положения приемно-передающих станций, калибровать параметры баз в разнесенных системах:
- угломерная система;
- дальномерная система;
- суммарно-дальномерная система;
- угломерно-дальномерная система.
РСДБ-система, дополненная активными передающими средствами, может синтезировать любую измерительную схему и реализовать любой метод пространственно-временных измерений относительных положений и их составляющих векторов скорости для объектов в ближней и дальней зоне в сочетании с возможностью выполнения угломерных измерений по опорным внегалактическим источникам для калибровки параметров баз и синхронизации шкал времени. Другое преимущество связано с возможностью проводить измерения относительно инерциальной системы координат ICRF или земной опорной геодезической системы ITRF. При этом выходное измерительное устройство, корреляционный спецпроцессор, должен совмещать в себе возможности оптимального фильтра и измерителя взаимной корреляционной функции сигналов имеющих динамически изменяющееся одновременное смещение по времени и частоте.
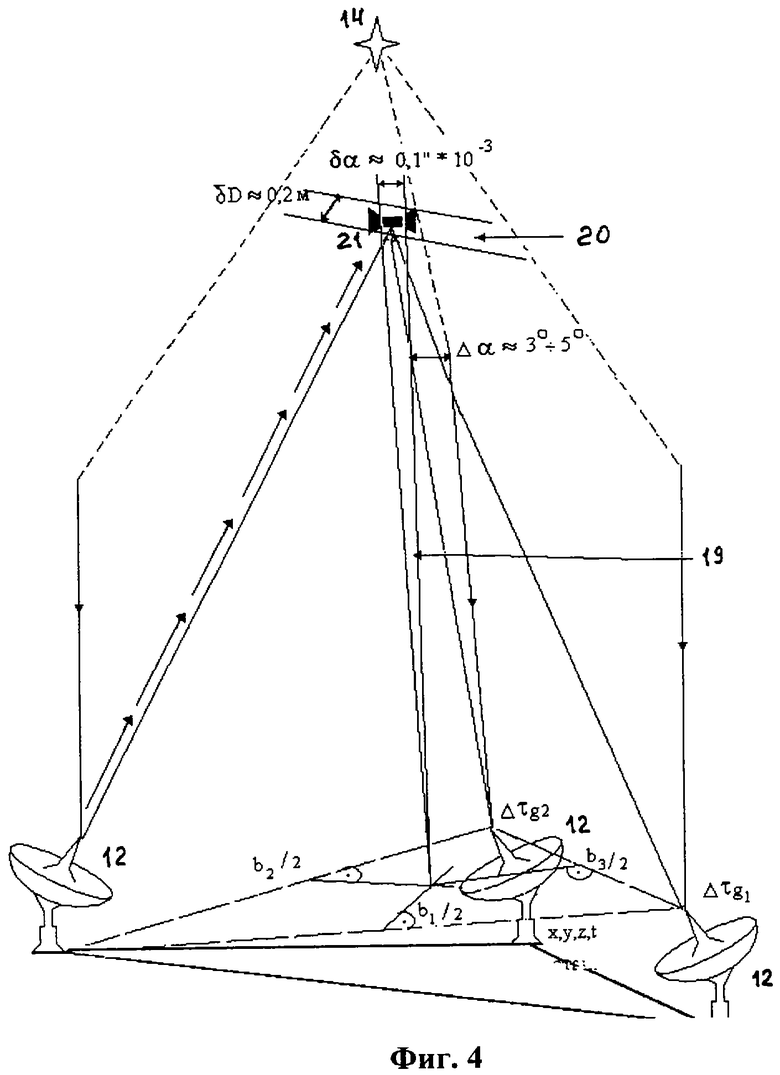
На Фиг.4 представлена схема дифференциальной радиолокационной РСДБ-системы, где положение космического аппарата 21 определяется исходя из данных о сферической поверхности 20 положения космического аппарата 21 по дальности и о телесном угле 19 положения космического аппарата 21 по углу.
Вектора положения, параметры орбиты и поправки времени и частоты любых объектов в воздушном и космическом пространстве определяются по радиолокационным эхо-сигналам в дифференциальном режиме в моностатическом, бистатическом режиме или разностно-дальномерным методом (гиперболичеким) с помощью сетей РСДБ, по результатам наблюдения внегалактических источников - квазаров с известными координатами. Положение объекта определяется триангуляционным методом по измеренной дальности между объектом и радиолокатором и измеренным разностям дальности между объектом и остальными станциями РСДБ или чисто гиперболическим методом в точке пересечения гиперболических поверхностей (гиперболоидов), образованных относительно баз РСДБ b1, b2, b3, b4.
ПВС является многоуровневой иерархической сетевой структурой, которая распространяет свои параметры.
- Наземная радио-астрогеодезическая составляющая ПВС (ITRF) распространяется на геодезические сети пользователей через все имеющиеся технологии: РСДБ, ГЛОНАСС и дифференциальные радионавигационные подсистемы, включая инфокоммуникационные сети и мобильную связь.
- Воздушная и космическая составляющие ПВС распространяются с использованием дифференциальных измерительных радиосистем всех известных типов:
- угломерных, дальномерных, угломерно-дальномерных, разностно-дальномерных, суммарно-дальномерных, а также с помощью их комбинаций в дифференциальных режимах.
- Оперативные измерения сегодня проводятся с использованием данных прогноза ПВЗ (ЕОР) по прогнозу положения геодезических координат относительно ICRF и координат воздушных и космических объектов на фоне ICRF.
- Непрерывные дифференциальные пространственно-временные измерения высшей точности проводятся с помощью совмещенных радиосистем и РСДБ-системы с применением калибровки по радиоисточникам из каталога ICRF, находящихся на близких угловых расстояниях.
- Распространение опорного базиса ПВС на системы пользователей осуществляется путем передачи высокоточных сигналов по наземным каналам связи, через системы радионавигации, через системы спутниковой связи и цифрового телевизионного вещания, через сети IP-телефонии, сеть Интернет с помощью протокола NTP с точностью до 1 мс и «нано ядро» с точностью до 1 нс, системы мобильной связи.
Услуги пространственно-временной системы пользователям предоставляются через самоопределение вектора положения по навигационным сигналам и высокоточной синхронизации времени и частоты и в режиме внешнего определения (иноопределения) и передачи пространственно-временных параметров потребителю.
Суммируя все вышесказанное, можно сказать, что заявляемая пространственно-временная система реального (ПВС РВ) - это многофункциональный глобальный радиотелескоп, созданный на основе технологии РСДБ, в котором все измерения выполняются и используются в режиме реального времени. Глобальный радиотелескоп непрерывно воспроизводит свои технические параметры, геодезические координаты, синхронизированные шкалы атомного времени и самокалибруется в результате наблюдений внегалактических радиоисточников. Он объединяет в себе функции глобальной, фундаментальной радиоастро-геодезической опорной сети, группового распределенного хранителя атомного времени и частоты, координатно-временные и навигационные системы для решения прикладных задач различного назначения, соединенные между собой высокоскоростными коммуникационными каналами и направленные на внегалактические объекты, при этом основные наблюдаемые величины измеряются непосредственно в ходе наблюдений и результаты обработки наблюдений получают непосредственно в ходе наблюдения в виде текущих значений наблюдаемых величин, получаемых в виде последовательности дискретных значений, следующих через половину интервала единичного наблюдения, при этом интервал наблюдения оптимизируют по двум параметрам: допустимой статистической погрешности измерения основных наблюдаемых величин и собственному интервалу (по Котельникову/Найквисту) флуктуаций задержки распространения в среде и инструментальных флуктуаций в аппаратуре станций наблюдения, коррекцию всех инструментальных погрешностей выполняют без дополнительных затрат времени в результате процедур, выполняемых параллельно с измерением кросскорреляционных функций, корректирующие поправки основных наблюдаемых величин в виде разностей между истинными и предвычисленными модельными значениями используют на станциях наблюдения в цепях обратной связи для реализации следящей системы по минимизации погрешностей измерений, при этом ошибки синхронизации времени и частоты передают на каждую станцию наблюдения в виде поправок к значениям опорной частоты 5 МГц и сигнала времени 1 с, что позволяет с помощью исполнительных устройств синхронизовать сеть с минимальными погрешностями в режиме реального времени, тогда как эти же погрешности используют для формирования суммарного сигнала опорной сети компаунд-интерферометра.
При компьютерном моделировании архитектуры ПВС РВ использовались данные о реально существующих в РФ аппаратурных и организационных возможностях.
В состав ПВС РВ были включены:
1. Базовая подсистема фундаментального пространственно-временного обеспечения (ФПВО), формирующая опорный пространственно-временной базис высшей точности (Stratum 0) в составе: не менее семи (в том числе резерв) опорных пунктов РСДБ с полноповоротными радиотелескопами диаметром 32-64 метра и атомными хранителями шкал времени и частоты Ч1-75. Все опорные пункты соединены оптическими каналами передачи данных.
2. Базовая подсистема прикладного пространственно-временного обеспечения (ПИВО), формирующая пространственно-временной базис первого уровня точности (Stratum 1) с неограниченным количеством радиотелескопов диаметром до 32 м и атомными хранителями шкал времени и частоты Ч1-75. Все радиотелескопы соединены каналами связи с Центром управления, сбора, обработки, анализа и передачи данных.
Базовые подсистемы ФПВО и ППВО и их элементы всех уровней точности являются полностью совместимыми.
3. Подсистема ППВО, формирующая координатно-временной базис второго уровня точности (Stratum 2), в составе 96-ти транспортируемых 3-метровых полноповоротных антенн, водородных стандартов частоты Ч1-76. Все антенны оснащены корреляционными спецпроцессорами, для автономной обработки измерений, и соединены каналами передачи данных с опорными пунктами базовой подсистемы высшей точности (Stratum 0) или с Центром управления, сбора, обработки и анализа данных в контрольно-калибровочном режиме.
1. Подсистема ППВО, второго уровня точности (Stratum 2) с мобильными радиотелескопами диаметром до 3 м, оснащены спутниковой связью и подключаются функционально к опорным пунктам базовых подсистем Stratum 0 и Stratum 1.
2. Эталонная база времени и частоты ГСВЧ (функционально).
3. Высокоскоростная магистральная система оптических каналов связи, объединяющая опорные пункты единой системы ФПВО и Центры управления, сбора, обработки и передачи данных.
4. Подсистема связи через геостационарные спутники на основе технологии VSAT, DirecPC и систем непосредственного телевизионного вещания.
5. Подсистема передачи пространственно-временной информации в виде системы мобильных и фиксированных инфокоммуникационных сетей доступа, необходимых для распространения опорного пространственно-временного базиса ПВС потребителям в реальном времени.
6. Подсистема контроля и управления ПВС РВ.
7. Подсистема средств потребителя.
8. Аппаратура потребителей мобильных информационно-навигационных систем нового поколения.
Результаты моделирования по данным международных служб РСДБ показали, что базовая система ФПВО (Stratum 0) позволит определять с точностью:
- параметры трехмерных координат точек земной поверхности и глобальных расстояний, включая расстояния между континентами-миллиметры и микроны;
- движение точек земной коры, в том числе глобальных тектонических движений - миллиметры в год;
- параметры ориентации Земли (координат полюса, всемирного времени, длительности суток, прецессии и нутации) - миллиметры и десятки микросекунд;
- синхронизацию атомных шкал времени, разнесенных на глобальные расстояния - десятки пикосекунд;
- координаты радиоисточников и космических аппаратов микросекунды дуги и при построении их радиоизображений - десятые доли миллисекунды дуги;
- определение параметров фундаментальных астрономических постоянных Солнечной системы- микросекунды дуги.
Прикладная ПВС РВ (Stratum 1) позволит определять с точностью:
- параметры трехмерных координат точек земной поверхности и глобальных расстояний - миллиметры и единицы сантиметров;
- движение точек земной коры, в том числе глобальных тектонических движений - сантиметры в год;
- параметры ориентации Земли (координат полюса, всемирного времени, длительности суток, прецессии и нутации) - миллиметры и десятки микросекунд;
- синхронизацию атомных шкал времени, разнесенных на глобальные расстояния - сотни пикосекунд;
- координат радиоисточников и космических аппаратов - миллисекунды дуги.
Подсистема ПВС РВ (Stratum 2) позволит определять с точностью:
- параметры трехмерных координат точек земной поверхности - десятки сантиметров глобальных расстояний - миллисекунды дуги;
- синхронизацию атомных шкал времени, разнесенных на глобальные расстояния - единицы наносекунд;
- координаты радиоисточников и космических аппаратов - несколько миллисекунды дуги.
В настоящее время у авторов нет сведений о наличии альтернативных методов, которые могли бы повторить или превысить точности пространственно-временных определений на глобальных расстояниях, в ближнем и дальнем космосе, получаемые, с помощью РСДБ - метода и его обобщенных приложений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ СИНХРОНИЗАЦИИ ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ | 2005 |
|
RU2291558C2 |
| ГЛОБАЛЬНАЯ СИСТЕМА СИНХРОНИЗАЦИИ | 2024 |
|
RU2833299C1 |
| ГЛОБАЛЬНАЯ ВЫСОКОСКОРОСТНАЯ ТЕЛЕКОММУНИКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2166234C1 |
| Станция колокации средств космической геодезии | 2020 |
|
RU2760829C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ВНЕЗЕМНЫХ ОБЪЕКТОВ РАДИОИНТЕРФЕРОМЕТРАМИ СО СВЕРХДЛИННЫМИ БАЗАМИ | 2016 |
|
RU2624638C1 |
| Способ определения навигационных параметров орбит космических аппаратов спутниковой навигационной системы ГЛОНАСС с применением результатов наблюдений квазаров в системе: астрономо-геодезическая обсерватория (радиотелескоп) - космический аппарат (радиотелескоп) ГЛОНАСС | 2024 |
|
RU2835569C1 |
| Способ создания пространственной астрономо-геодезической сети на поверхности Луны с применением мобильных систем длиннобазисной радиоинтерферометрии по наблюдению квазаров | 2022 |
|
RU2785088C1 |
| РАДИОИНТЕРФЕРОМЕТРИЧЕСКИЙ СПОСОБ ИССЛЕДОВАНИЯ ОБЪЕКТОВ БЛИЖНЕГО И ДАЛЬНЕГО КОСМОСА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2016 |
|
RU2624912C1 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЗАИМНЫХ ВРЕМЕННЫХ ЗАДЕРЖЕК | 1991 |
|
RU2013789C1 |
| Способ измерений параметров радиоизлучения блазаров для формирования их каталога | 2021 |
|
RU2814421C1 |
Изобретение относится к технике связи и измерительной технике и может использоваться для обеспечения высокоточных измерений параметров движения объектов в режиме реального времени. Технический результат состоит в создании пространственно-временной системы реального времени, базирующейся на радиоинтерферометрических измерениях. Для этого в пространственно-временной системе реального времени результаты обработки наблюдений получают непосредственно в ходе наблюдения в виде текущих значений наблюдаемых величин, при этом интервал наблюдения оптимизируют по двум параметрам: допустимой статистической погрешности измерения основных наблюдаемых величин и собственному интервалу (по Котельникову/Найквисту) флуктуаций задержки распространения в среде и инструментальных флуктуаций в аппаратуре станций наблюдения, корректирующие поправки основных наблюдаемых величин в виде разностей между истинными и предвычисленными модельными значениями используют на станциях наблюдения в цепях обратной связи для корректировки и минимизации погрешностей измерений, при этом ошибки синхронизации времени и частоты передают на каждую станцию наблюдения в виде поправок к значениям опорной частоты и значений сигнала времени 1 с. 4 ил.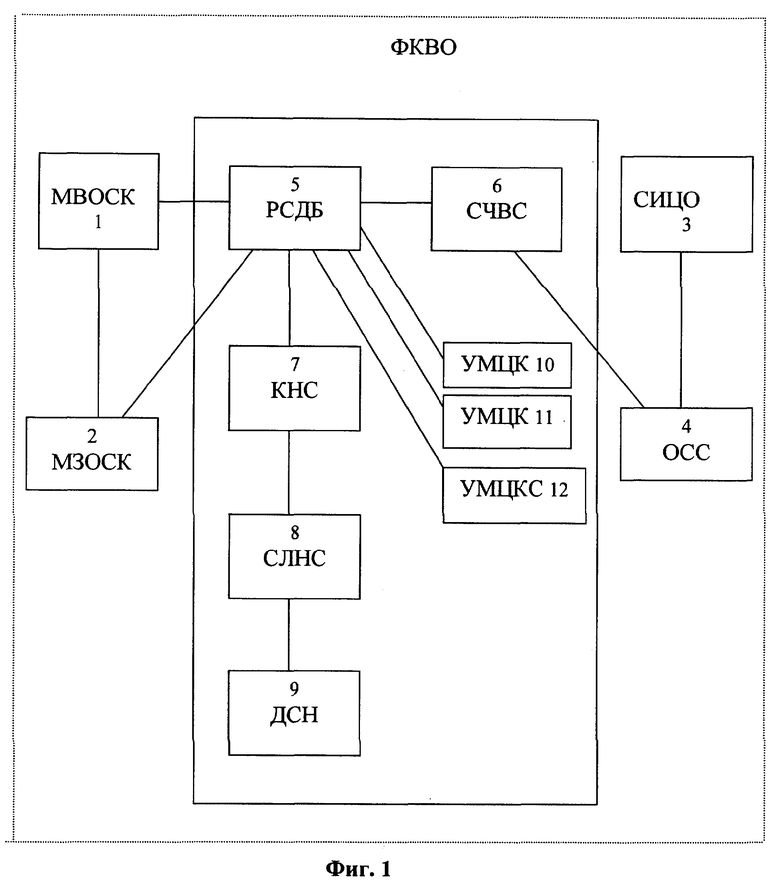
Способ комплексного измерения в реальном времени параметров пространственно-временной системы, включающей в себя аппаратурный комплекс радиоинтерферометрической сети со сверхдлинными базами (РСДБ-системы), состоящий из трех или более радиотелескопов, соединенных между собой скоростными коммуникационными каналами и направленных на внегалактические объекты, и передачи измеренных параметров пользователю, заключающийся в том, что производят измерения основных наблюдаемых величин непосредственно в ходе наблюдений внегалактических источников и передают данные в центр обработки, получают результаты обработки наблюдений в виде последовательности дискретных текущих значений кросскорреляционных функций, следующих через половину интервала единичного наблюдения, при этом интервал наблюдения оптимизируется по двум параметрам: допустимой статистической погрешности измерений основных наблюдаемых величин и собственного интервала по Котельникову/Найквисту флуктуаций задержки распространения в среде и инструментальных флуктуаций в радиотелескопах РСДБ-системы, при этом коррекцию всех инструментальных погрешностей выполняют без дополнительных затрат времени в результате процедур, выполняемых параллельно с измерением кросскорреляционных функций, корректирующие поправки основных наблюдаемых величин в виде разностей между истинными и предвычисленными модельными значениями используют на радиотелескопах РСДБ-системы в цепях обратной связи для корректировки положения всех радиотелескопов относительно положения внегалактических объектов и минимизации погрешностей измерений, при этом ошибки синхронизации времени и частоты передают из центра обработки на каждый радиотелескоп в виде поправок к значениям опорной частоты и значениям сигнала времени 1 с, эти погрешности измерений одновременно используются для формирования предназначенного пользователю суммарного сигнала от всех радиотелескопов РСДБ системы, при этом пользователь образует двухэлементный компаунд-интерферометр с синхронизированной РСДБ-системой, работающей в режиме фазированной решетки глобальных размеров с суммарной площадью, равной сумме эффективных площадей входящих в нее радиотелескопов РСДБ-системы.
| ГЛОБАЛЬНАЯ ВЫСОКОСКОРОСТНАЯ ТЕЛЕКОММУНИКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2166234C1 |
| US 5717404 А, 10.02.1998 | |||
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЧАСОВ | 2000 |
|
RU2177167C2 |

