Изобретение относится к космической геодезии, в частности к определению навигационных параметров орбит космических аппаратов спутниковой навигационной системы ГЛОНАСС орбитальным методом космической геодезии с применением результатов наблюдений квазаров.
Способ определения навигационных параметров орбит космических аппаратов спутниковой навигационной системы (СНС) ГЛОНАСС с применением результатов наблюдений квазаров в системе: астрономо-геодезическая обсерватория (радиотелескоп) - космический аппарат (радиотелескоп) ГЛОНАСС предложен впервые и аналогов не имеет.
В ближайшей перспективе ГЛОНАСС/GPS/GALILEO/BEIDOU технологии спутниковой навигации еще более широко будут применяться для решения фундаментальных задач геодезии, гравиметрии, геодинамики, навигации, геоинформатики [5-11]. При этом данные ГЛОНАСС, GPS являются базовыми для единой системы геодезического обеспечения (ЕС ГО) глобальной геопространственной информации геоинформационных систем автоматизированных средств управления министерств и ведомств Российской Федерации в государственной Общеземной геодезической системе координат (ОГСК) Российской Федерации (или WGS-84 - США). Поэтому их главной задачей является повышение эффективности уточнения параметров ОГСК, параметров внешнего гравитационного поля Земли (ВГПЗ), космической геодезической сети (КГС), параметров вращения Земли (ПВЗ) с применением существующих и перспективных космических геодезических комплексов (КГК) с субдециметровой точностью за счет внедрения строгих теоретических основ динамического, орбитального методов космической геодезии, которые имеют приоритет в решении задач СНС ГЛОНАСС, КГС [8-12]. Перспективное развитие СНС ГЛОНАСС связано с применением систем длиннобазисной радиоинтерферометрии по наблюдению квазаров [1-6, 9]. Решение существующих проблем с развитием ГЛОНАСС-технологий, результаты решения целевых задач космической геодезии по данным КГК позволят России иметь приоритет в ЕС управления ГО глобальной геопространственной информацией (ГГПИ) в международной программе Организации Объединенных Наций (УГГПИ/ООН в глобальной геодезической системе координат (ГГСК)).
Известно, что в США [15], России [14] ведутся исследования по развитию NAVSTAR (GPS) и СНС ГЛОНАСС в целях повышения их эффективности, характеризуемой более высокой надежностью, точностью и оперативностью определения навигационных параметров в мировых геодезических системах координат: WGS-84, ОГСК и Всемирного времени UTC (USNO) и UTC (SU), соответственно [13].
В ближайшей перспективе альтернативой модернизации и развития СНС ГЛОНАСС станет решение научной задачи по применению результатов наблюдений квазаров (пульсаров), которые посылают в космос короткие, длительностью миллисекунды или десятки миллисекунд, периодические импульсы рентгеновского излучения, которые не подвержены воздействию электромагнитных помех и могут использоваться для управления полетом гиперзвуковых ракет, проходя сквозь плазму, гарантируя надежность передаваемых и получаемых навигационных параметров. Например, в США рассматривается резервная навигационная система не только для функционирования в интересах ВМФ, но и разрабатываемая с системой навигации и времени с гарантированным определением навигационных параметров (Mounted Assured Position Novigation and System, MAPS) для Сухопутных войск США. Предполагается, что данная система позволит не только выполнять метрологию данных GPS, но и способна заменить их [14, 15].
Актуальность нового способа определения навигационных параметров орбит космических аппаратов спутниковой навигационной системы ГЛОНАСС с применением результатов наблюдений квазаров в системе: «астрономо-геодезическая обсерватория (радиотелескоп) - космический аппарат (радиотелескоп) ГЛОНАСС» подтверждается острой необходимостью создания надежного, высокоточного и оперативного определения навигационных параметров в государственной ОГСК, Всемирном времени РФ или в инерциальной геодезической системе координат (ИГСК). Развитие СНС ГЛОНАСС с использованием новых средств и технологий обусловлена необходимостью разрешения существующих противоречий, связанных с одной стороны:
- необходимостью удовлетворения перспективных требований министерств и ведомств РФ к гарантированному навигационному обеспечению войск и систем оружия с применением СНС ГЛОНАСС в мирное и военное время;
- внедрения перспективных методов и ДБРИ-технологий с развитием СНС ГЛОНАСС, базирующихся на результатах наблюдений квазаров (пульсаров) с применением эффективных систем астрономо-геодезической обсерватории с радиотелескопом и космического аппарата с радиотелескопом на борту («АГО (РТ) - КА (РТ)») в СНС ГЛОНАСС, которые не подверженны современным помехам средств: РЭБ, «глушилок» и др.;
- необходимостью высокоточного установления ОГСК, ИГСК, ПВЗ, квазаров, согласованной Системы фундаментальных геодезических и гравиметрических параметров Земли (ФГГПЗ);
- наличием научно-практических разработок по применению ДБРИ в астрономии, геодезии, геодинамике [1-3, 6, 9];
- необходимостью создания мобильных систем ДБРИ «АГО (РТ) - АГО (РТ)», «АГО (РТ) - БЛА (РТ)» [4, 5, 9].
С другой стороны:
- современное геодезическое обеспечение СНС ГЛОНАСС недостаточно полно удовлетворяет перспективным требованиям ВС РФ к гарантированному координатно-временному и навигационному обеспечению войск и систем оружия при ведении боевых действий из-за невозможности управления ракетами на гиперзвуковых скоростях в связи с тем, что современные технологии ГЛОНАСС не позволяют осуществить прохождение сигналов через окружающую плазму, из-за действий РЭБ, «глушилок» и т.д. [14, 15];
- отсутствие альтернативной автономной системы навигации в ОГСК (ИГСК), являющей базовой системой СНС ГЛОНАСС управления ЕАСО ГПИ ВС РФ;
- отсутствие мобильной системы с применением методов и технологий ДБРИ в РФ для оперативного определения координат полюсов и неравномерности вращения Земли, координат объектов, контроля навигационного поля СНС ГЛОНАСС.
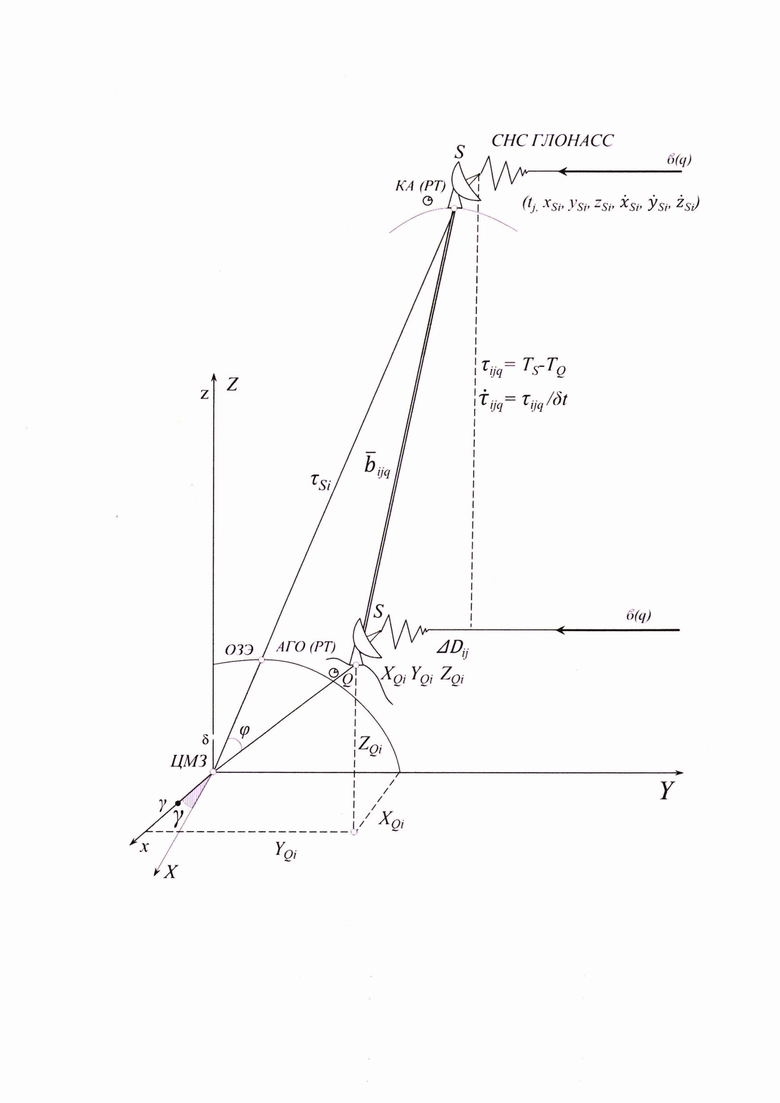
Описание и схема структуры применения предлагаемого способа с применением ДБРИ-технологии приведены на чертеже. Принцип способа состоит в том, что система ДБРИ предусматривает расположение двух радиотелескопов (РТ) на: поверхности Земли - АГО (РТ) и на борту КА (РТ) ГЛОНАСС [1, 2, 4, 6], оснащенных высокостабильными стандартами частоты. С помощью гетеродинов принимаемое высокочастотное излучение от радиоисточника (σ) поступает не одновременно, а с некоторым запаздыванием по времени (TS, TQ), и как конечный результат, находят две фундаментальные измеренные величины: временную задержку τijq, обусловленную разностью расстояний ΔDij до фазовых центров КА (РТ) и АГО (РТ), которая будет меняться из-за изменения угла между базой bij и направлением на квазар (σ); временную задержку вращения Земли 
Именно эти величины и являются основой рассматриваемого нового способа для решения задач геодезического обеспечения СНС ГЛОНАСС и определения навигационных параметров  Достоинством данного способа является возможность высокоточного определения координат полюсов, неравномерность вращения Земли (Δω), координат квазаров (СКП~0,001'', …, 0,0001''), поправок за метеоусловия и расхождение шкал часов АГО (РТ), КА (РТ), а главное - значительно повысить точность установления ИГСК, являющейся основой высокоточного ориентирования осей единой государственной ОГСК на эпоху Т0 [2-7, 9].
Достоинством данного способа является возможность высокоточного определения координат полюсов, неравномерность вращения Земли (Δω), координат квазаров (СКП~0,001'', …, 0,0001''), поправок за метеоусловия и расхождение шкал часов АГО (РТ), КА (РТ), а главное - значительно повысить точность установления ИГСК, являющейся основой высокоточного ориентирования осей единой государственной ОГСК на эпоху Т0 [2-7, 9].
Представим исходные теоретические положения способа.
Геометрически временная задержка прихода сигнала от квазара на антенны радиотелескопов АГО (РТ) и КА (РТ) СНС ГЛОНАСС базовой линии bij на момент tn (чертеж) имеет вид [9].
где
γq=(αq-S) ~ часовой угол квазара.
Уравнение для системы ДБРИ «АГО-АГО» имеет вид [4]:
Временная задержка в инерциальной системе координат запишется [7]:

где
 - разности координат базовой линии bij в Общеземной системе координат;
- разности координат базовой линии bij в Общеземной системе координат;
R(xp, yp), R(S), R(ω, ℵ, ν), R(ψ, ε) - матрицы вращения за полюс, истинное звездное время (S), прецессию и нутацию соответственно.
Исходя из чертежа и формул (1-5), измеренные величины в орбитальном методе космической геодезии можно представить в трех вариантах: во-первых, как непосредственно измеренные величины τijq,  во-вторых, как функции «измеренных» координат (xS, yS, zS) и кеплеровых элементов орбиты, в-третьих, как функцию «измеренных» геоцентрических радиусов (rijq) положения КА (РТ) относительно положения центра масс Земли (ЦМЗ).
во-вторых, как функции «измеренных» координат (xS, yS, zS) и кеплеровых элементов орбиты, в-третьих, как функцию «измеренных» геоцентрических радиусов (rijq) положения КА (РТ) относительно положения центра масс Земли (ЦМЗ).
Функциональную связь между измеренными величинами  параметрами: орбиты КА (РТ)
параметрами: орбиты КА (РТ)  координатами АГО (РТ)
координатами АГО (РТ)  координатами полюса и неравномерностью вращения Земли (хр, ур, ω3), поправкой за метеоусловия и расхождения шкал времени запишем в виде
координатами полюса и неравномерностью вращения Земли (хр, ур, ω3), поправкой за метеоусловия и расхождения шкал времени запишем в виде
Систему уравнений поправок для измерений τijq,  в матричном виде
в матричном виде

где

или

- изохронные производные;
 - поправки начального условия орбитальной дуги КА (РТ) на момент времени t0;
- поправки начального условия орбитальной дуги КА (РТ) на момент времени t0;
δRq={δX1, δY1, δZ1, …,δXi, δYi, δZi}' - поправки в координаты АГО(РТ);
δσ={δxp, δyp, δ(Δω)}' - поправки в координаты полюса и неравномерность вращения Земли;
δq={(αq-αl), δq}' - поправки в разность прямых восхождений и склонения (q) квазаров;
δ(Δτ01, Δτ1i) - поправки за метеоусловия и расхождения шкал часов на АГО (РТ) и КА (РТ);
 - свободные члены уравнений;
- свободные члены уравнений;
 - веса измеренных величин.
- веса измеренных величин.
Исходя из того, что влияние параметров прецессии и нутации мало, частные производные для измеренных величин временной задержки (τijq) и временной задержки вращения  [9] в уравнении (8) представим с учетом частных производных от измерения τijq в виде
[9] в уравнении (8) представим с учетом частных производных от измерения τijq в виде

где
δω3=UT1-UTC - поправка в разность между всемирным временем (UT1) и всемирным координированным временем (UTC).
Уравнение поправок от измерения временной задержки τijq в виде

где
b1=cosδqsinγq; b2=cosδqcosγq;
b3=cosδ(xpsinγq-ypcosγq);
b4=b5=b6=0; b7=-b1; b8=-b2; b9=-b3;
b15=1i.
Функциональная связь «измеренных» координат (xs, ys, zs) КА (S) [11] с кеплеровыми элементами орбиты [1-3] имеют вид:

Исходя из [11] частные производные, следующие из уравнений (15), с учетом, что

где u - аргумент широты, имеет вид:
свободные члены:

где  - счислимые и «измеренные» координаты KA(S), соответственно
- счислимые и «измеренные» координаты KA(S), соответственно
Функциональная связь «измеренных» геоцентрических радиусов  и искомых поправок в НУ орбитальной дуги (t-t0) KA(S), запишем в виде
и искомых поправок в НУ орбитальной дуги (t-t0) KA(S), запишем в виде

Уравнение поправок для «измеренных» геоцентрических расстояний  , следующих из уравнений (17, 19) получим в форме
, следующих из уравнений (17, 19) получим в форме
где Δrs - систематическая погрешность в «измеренном» геоцентрическом радиусе, свободный член равен

 - счислимые значения координат КА (ГАП) и «измеренного» геоцентрического радиуса, соответственно.
- счислимые значения координат КА (ГАП) и «измеренного» геоцентрического радиуса, соответственно.
При уточнении НУ орбитальной дуги (Sj) в орбитальном методом уравнения поправок для «измеренных» геоцентрических радиусов (rsj) уравнение поправок имеет вид

где

δθ0=(δa0, δe0, δi0, δu0, δΩl0)'.
Вектор поправок искомых параметров δθ0 - при решении системы нормальных уравнении МНК (V'PV=min)

а искомая ковариационная матрица равна

где μ - ошибка единицы веса уравненного «измеренного» геоцентрического радиуса положения КА (РА) ГЛОНАСС относительно ЦМЗ.
Техническим результатом способа является возможность ускоренной модернизации и развития СНС ГЛОНАСС, в соответствии с предложенным способом, основанном на технологии ДБРИ и оснащении мобильными радиотелескопами системы «АГО (РТ) - КА (РТ) ГЛОНАСС» для наблюдений квазаров в целях повышения эффективности навигационного обеспечения ЕС ГО глобальной ГПИ в ЕАСО ГПИ министерств и ведомств Российской Федерации, экономики страны за счет гарантированной надежности определения: навигационных параметров (координат и абсолютной скорости объекта во Всемирном координированном времени РФ) в единой государственной ОГСК; ИГСК, координат АГО (РТ), координат полюсов и неравномерности вращения Земли, координат квазаров.
Внедрение способа позволит создать эффективную систему контроля: навигационного поля ГЛОНАСС как на поверхности Земли, так и в космосе, повысить точность определения параметров орбит КА, ПВЗ, ОГСК, ИГСК, определение влияния РЭБ и других факторов на обеспечение войск и систем оружия геодезическими и навигационными данными, что повысит надежность и оперативность управления всеми военными и гражданскими потребителями ГЛОНАСС.
Разработанные теоретические основы определения параметров КА (РТ) ГЛОНАСС, АГО (РТ), ПВЗ, ОГСК (ИГСК) орбитальным методом космической геодезии с применением результатов наблюдений квазаров и ДБРИ-технологий при развитии СНС ГЛОНАСС универсальны и позволяют их использовать и при решении проблем навигации с системой КА (РТ) на геостационарных орбитах Земли в СНС ГЛОНАСС, Луне, Марсе.
Развитие СНС ГЛОНАСС с внедрением системы «АГО(РТ) - КА(РТ) ГЛОНАСС» выведет на новый уровень и существенно повысит технические характеристики СНС ГЛОНАСС и позволит более эффективно решать главные научно-технические задачи геодезии, географии, геофизики, геодинамики и других наук о Земле. При этом, Россия получит приоритет в Международной программе Организации Объединенных Наций «УГГИ/ООН в ГГСК», обосновании ТТХ перспективных КГК.
Список использованных источников
1. Жонголович И.Д., Валяев В.И., Малков А.А., Сабанина Т.Б. Использование радиоинтерферометра со сверхдлинной базой при решении ряда основных проблем астрономии, геодезии и геодинамики. - М.: Труды института теоретической астрономии, №16, АН СССР, 1977, с. 19-58.
2. Малец К.В. Исследование эффективности методов построения КГС.- М.: 29 НИИ, инв. №3988, 1975.
3. Малец К.В. Использование радиоинтерферометров высокого разрешения для повышения точности КГС.- М.: 29 НИИ, НТС №12, РИО ВТС№12, 1977.
4. Малец К.В. Оценка точности определения положения центра масс Земли и элементов ориентирования ГСК по результатам наблюдений с помощью систем РСДБ «АГО-ИСЗ». - М.: 29 НИИ, НТС, РИО ВТС №27, 1984.
5. Машимов М.М., Малец К.В., Швец А.И. О возможности определения параметров геоцентрической системы геодезических координат современными методами геодезии. - М.: «Изв ВУЗов», «Геодезия и аэрофотосъемка», №5, 1979.
6. Машимов М.М., Малец К.В., Саталкин О.М. Исследование эффективности численных оценок и линейных измерений при построении сети АГО. - М.: «Изв ВУЗов», «Геодезия и аэрофотосъемка», №6, 1979.
7. Машимов М.М., Малец К.В. Определение координат полюса и неравномерности вращения Земли по наблюдениям космических объектов. - М.: «Изв ВУЗов», «Геодезия и аэрофотосъемка», №6, 1980.
8. Машимов М.М., Малец К.В., Смирнов С.А. Динамический метод космической геодезии определения параметров внешнего гравитационного поля Земли по результатам дальномерных, доплеровских и высотомерных измерений. - М.: «Изв ВУЗов», «Геодезия и аэрофотосъемка», №4-5, 1992.
9. Малец К.В. Исследование точности совместного определения координат полюса, неравномерности вращения Земли, положения АГО, квазаров и временных поправок за метеоусловия и расхождения шкал часов с использованием систем ДБРИ. - М.: «Изв ВУЗов», «Геодезия и аэрофотосъемка», №4, 1993.
10. Малец К.В., Лангеман И.П., Рутько И.М. Проблема определения параметров глобальной модели внешнего гравитационного поля Земли с применением методов спутникового нивелирования и технологий КГС «Гео-ик-2», «Гео-ик-3» в целях гравиметрического и геодезического обеспечения ГИС ВН АСУВ ВС РФ. - М.: ВУНЦ СВ «ОВА ВС РФ», ТНС №1, 2019.
11. Малец К.В., Рутько И.М. К проблеме высокоточного определения положения КА ВН с применением орбитального метода космической геодезии и ГЛОНАСС/GPS-технологий. - М.: ВУНЦ СВ «ОВА ВС РФ», ТНС.
12. Урмаев М.С. Орбитальные методы космической геодезии. - М.: Недра, 1981.
13. Российский радионавигационный план. - М.: Минэкономразвития, 2018.
14. Гундарова Л. Пульсар путеводный (ВМФ США ищут альтернативу GPS). - М: Независимое военное обозрение, №15, 2021.
15. Гундарова Л. Прощай, GPS (Россия переходит на навигацию по рентген, пульсарам). - М: Независимое военное обозрение, №31, 2021.
16. Международная программа ООН «ЕС управления ГГПИ в глобальной геодезической системе координат», «УГГИ/ООН в ГГСК».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ создания пространственной астрономо-геодезической сети на поверхности Луны с применением мобильных систем длиннобазисной радиоинтерферометрии по наблюдению квазаров | 2022 |
|
RU2785088C1 |
| Способ спутникового геодезического нивелирования определения параметров глобальной модели внешнего гравитационного поля Земли (ВГПЗ) | 2021 |
|
RU2783645C1 |
| Способ построения Мировой космической геодезической сети с применением результатов наблюдений космических аппаратов спутниковых навигационных систем | 2021 |
|
RU2776698C1 |
| Станция колокации средств космической геодезии | 2020 |
|
RU2760829C1 |
| Способ навигационного контроля орбит выведения космических аппаратов и система для его реализации | 2021 |
|
RU2759173C1 |
| ПРОСТРАНСТВЕННО-ВРЕМЕННАЯ СИСТЕМА РЕАЛЬНОГО ВРЕМЕНИ | 2005 |
|
RU2274953C1 |
| ГЛОБАЛЬНАЯ СИСТЕМА СИНХРОНИЗАЦИИ | 2024 |
|
RU2833299C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2247945C1 |
| СПОСОБ СОЗДАНИЯ КОСМИЧЕСКОЙ ГЕОДЕЗИЧЕСКОЙ СЕТИ | 1997 |
|
RU2124217C1 |
| КОРРЕКТИРУЕМАЯ СИСТЕМА ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И СТАБИЛИЗАЦИИ | 2006 |
|
RU2319930C2 |
Изобретение относится к космической геодезии, в частности к определению навигационных параметров орбит космических аппаратов спутниковой навигационной системы ГЛОНАСС орбитальным методом космической геодезии с применением результатов наблюдений квазаров. Техническим результатом является повышение эффективности навигационного обеспечения единой системы геодезического обеспечения глобальной геопространственной информацией за счет гарантированной надежности определения навигационных параметров - координат и абсолютной скорости объекта во Всемирном координированном времени РФ - в единой государственной общеземной геодезической системе координат, инерциальной геодезической системе координат, координат астрономо-геодезической обсерватории с радиотелескопом (АГО (РТ)), координат полюсов и неравномерности вращения Земли, координат квазаров. Заявленный способ состоит в том, что система длиннобазисной радиоинтерферометрии (ДБРИ) предусматривает расположение двух радиотелескопов (РТ) на: поверхности Земли - АГО (РТ) и на борту космического аппарата - КА (РТ) ГЛОНАСС, оснащенных высокостабильными стандартами частоты. С помощью гетеродинов принимаемое высокочастотное излучение от радиоисточника поступает не одновременно, а с некоторым запаздыванием по времени. В результате находят две фундаментальные измеренные величины: временную задержку, обусловленную разностью расстояний до фазовых центров КА (РТ) и АГО (РТ), которая будет меняться из-за изменения угла между базой и направлением на квазар, и временную задержку вращения Земли. 1 ил.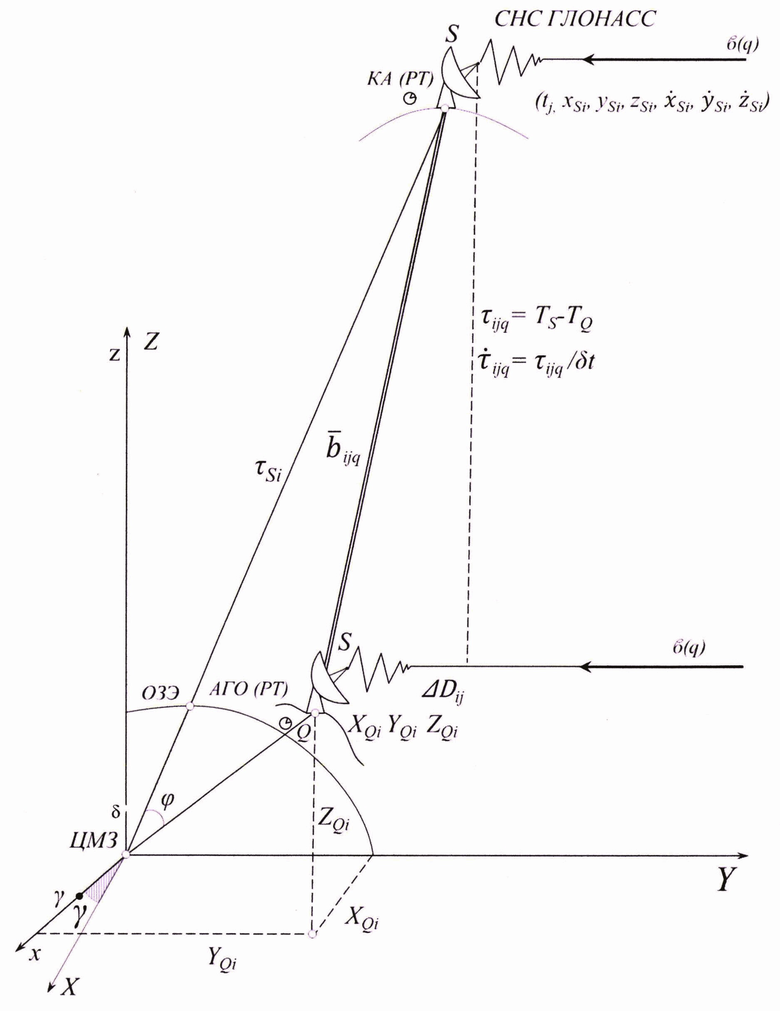
Способ определения навигационных параметров орбит космических аппаратов спутниковой навигационной системы ГЛОНАСС, заключающийся в том, что используют систему длиннобазисной радиоинтерферометрии с двумя радиотелескопами, один из которых располагают на поверхности Земли на астрономо-геодезической обсерватории (АГО), а второй радиотелескоп располагают на борту космического аппарата (КА) системы ГЛОНАСС, при этом оба телескопа оснащают высокостабильными стандартами частоты, принимают в такой системе с использованием гетеродинов двух радиотелескопов КА и АГО высокочастотные излучения от радиоисточника - квазара, с некоторым запаздыванием по времени, позволяющим найти две фундаментальные измеренные величины: первую - временную задержку τijq, обусловленную разностью расстояний до фазовых центров радиотелескопов на борту КА и АГО на поверхности Земли, при этом такая задержка будет меняться из-за изменения угла между базовой линией - расстоянием между радиотелескопами КА и АГО в определенный момент времени, и направлением на квазар, вторую - временную задержку вращения Земли  , определяют параметры орбиты КА ГЛОНАСС - координаты и абсолютную скорость, орбитальным методом космической геодезии, используя значения измеренных задержек τijq и
, определяют параметры орбиты КА ГЛОНАСС - координаты и абсолютную скорость, орбитальным методом космической геодезии, используя значения измеренных задержек τijq и  и базовой линии между радиотелескопами КА и АГО.
и базовой линии между радиотелескопами КА и АГО.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 2004 |
|
RU2275650C1 |
| Способ создания пространственной астрономо-геодезической сети на поверхности Луны с применением мобильных систем длиннобазисной радиоинтерферометрии по наблюдению квазаров | 2022 |
|
RU2785088C1 |
| ВОРОНЕЦКИЙ С.В., ЗАЙЧИКОВ А.В., ФУРСОВ А.А | |||
| Определение высокоточных параметров движения низкоорбитальных космических аппаратов по измерениям бортового ГНСС-приемника | |||
| Методы, технологии, результаты и перспективы // Вестник СГУГиТ (Сибирского государственного университета геосистем и | |||

