Изобретение относится к области летательных аппаратов /ЛА/ со свойствами самолета и вертолета.
Аналогов заявляемому изобретению не найдено.
Техническим результатом заявляемого изобретения является создание ЛА практически любой грузоподъемности с возможностью как вертикального взлета, посадки, вертикальных маневров, так и скоростного горизонтального полета.
Указанный технический результат достигается тем, что заявляемый безаэродромный ЛА выполнен по схеме биплан с нижней подъемно-несущей плоскостью, содержащей встроенные турбовентиляторы с управляемым вектором тяги с газовым приводом от маршевых турбореактивных двигателей /ТРД/, связанным также с газоструйной системой управления полетом в вертолетном режиме на основе двойного разветвляющегося сопла и сопла с отклоняющимися створками.
Безаэродромный ЛА выполнен в трех вариантах, отличающихся конструктивными особенностями нижней подъемно-несущей плоскости: поворотной, неподвижной и подвесной. С целью уменьшения взаимного влияния верхняя и нижняя плоскости сдвинуты одна относительно другой в продольном направлении и разнесены по высоте, для чего верхняя плоскость в корневой части выполнена V-образной.
Сущность заявляемого изобретения поясняется чертежами, на которых показано:
Фиг.1. Общие виды ЛА с поворотной нижней плоскостью.
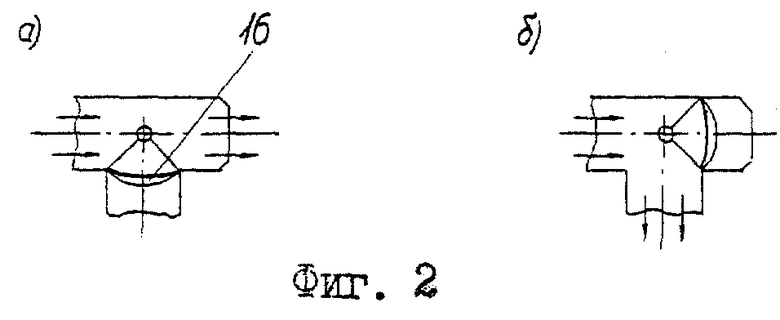
Фиг.2. Стыковочный газогенераторный узел.
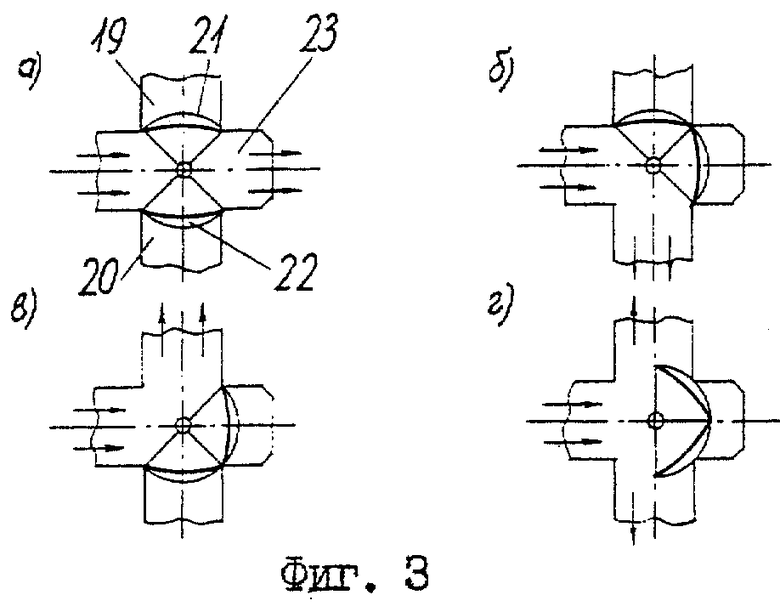
Фиг.3. Двойное разветвляющееся сопло.
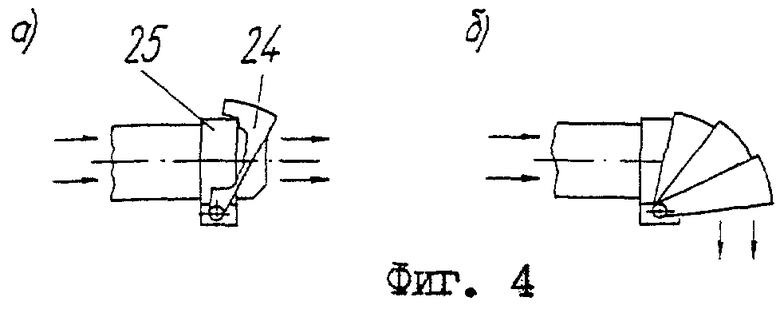
Фиг.4. Поворотное сопло с отклоняющимися створками.
Фиг.5. Общие виды ЛА с неподвижной нижней плоскостью.
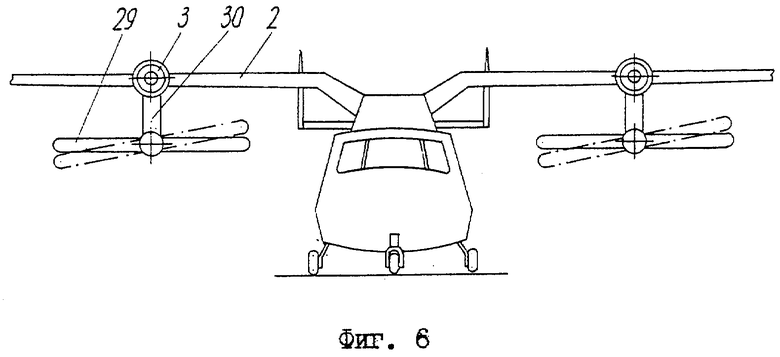
Фиг.6. Общий вид спереди ЛА с подвесной нижней плоскостью.
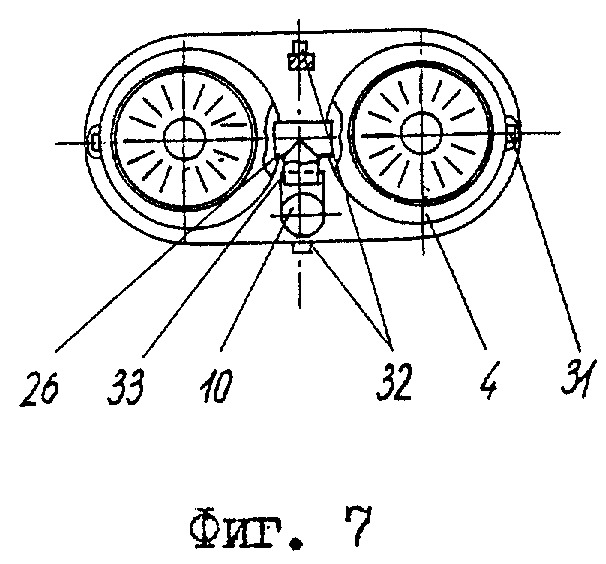
Фиг.7. Подъемная платформа подвесной нижней плоскости.
Безаэродромный ЛА с поворотной нижней плоскостью /фиг.1/ содержит нижнюю 1 и верхнюю 2 несущие плоскости, маршевые ТРД 3, расположенные на консолях на верхней несущей плоскости 2, и подъемные турбовентиляторы с продольным 4 и поперечным 5 управляемыми векторами тяги. Правая и левая полуплоскости подъемно-несущей плоскости 1 снабжены поворотным механизмом с возможностью поворота их вокруг оси 6 и размещения в бортовых нишах 7 фюзеляжа на скоростных участках маршевого полета. В развернутом положении правая и левая нижние полуплоскости фиксируются крепежными узлами 8, выполненными в одном блоке со стыковочными газогенераторными узлами с отверстиями 9 осевых сопел ТРД 3. На фиг.1 левая /по чертежу/ подъемная полуплоскость показана в развернутом положении, правая полуплоскость - размещенной в бортовой нише фюзеляжа. В развернутом положении нижняя плоскость 1 образует с верхней плоскостью 2 жесткую коробчатую конструкцию.
На фиг.1 в качестве примера реализации заявляемого технического решения показан ЛА с двумя маршевыми двигателями. Как газогенераторы ТРД имеют общую газовую магистраль, образуемую газоподводящими 10, переходными /левым и правым/ 11 трубопроводами и общими трубопроводом 12. Стыковочные части трубопроводов 10 и 11 снабжены уплотнительными фланцами 13 и 14, которые в своей нижней /чертежу/ части связаны шарнирами 15, причем правый и левый трубопроводы 11 телескопически входят в общий трубопровод 12 и снабжены уплотнительными кольцами. Таким образом, в вертолетном режиме безаэродромного ЛА газовая магистраль оказывается закольцованной, что обеспечивает необходимую надежность функционирования турбовентиляторных полуплоскостей.
При повороте полуплоскостей подъемно-несущей плоскости 1 и размещении их в бортовых нишах 7 фюзеляжа фланцы 13 трубопровода 10 действуют через шарнир 15 на фланцы 14 трубопровода 11 и вместе с общим трубопроводом 12 перемещает их в верхнее /по чертежу/ положение, показанное штрих-пунктирными линиями.
Для обеспечения функционирования маршевых ТРД в режиме газогенераторов они снабжены стыковочными газогенераторным узлом в виде простого разветвляющегося сопла, показанного на фиг.2. На позиции а/ газовая заслонка 16 запирает входное отверстие в питающий турбовентиляторы трубопровод 10, что соответствует режиму скоростного маршевого полета, на позиции б/ газовая заслонка 16 запирает осевое сопло маршевого ТРД и газовый поток, проходя через газоподводящий трубопровод 10, действует только на лопатки турбин вентиляторов, что соответствует вертолетному режиму полета ЛА. Газовый поток от газогенератора ТРД, попадая на лопаточные венцы турбин вентиляторов, обеспечивает их вертикальную тягу. При этом турбовентиляторы 4, поворачиваясь вокруг поперечной относительно ЛА оси, могут создавать определенную продольную тягу, обеспечивая, например, начальный горизонтальный разгон ЛА при подъеме или торможение при посадке, а турбовентиляторы 5, установленные с возможностью их поворота вокруг продольной относительно ЛА оси, обеспечивать при необходимости боковое перемещение ЛА.
Управление полетом ЛА в вертолетном режиме осуществляется с помощью отдельного ТРД 17, размещенного в хвостовой части фюзеляжа и снабженного выдвижным воздухозаборником 18. Выходная часть ТРД 17 представляет собой двойное разветвляющееся сопло, показанное на фиг.3. На позиции а/ верхнее и нижнее 20 сопла закрыты газовыми заслонками 21 и 22 и газовый поток проходит через осевое сопло 23, т.е. управляющее действие отсутствует. На позиции б/ нижнее сопло 20 открыто, а осевое 23 и верхнее 19 сопла закрыты, вследствие чего хвостовая часть ЛА отклоняется вверх. На позиции в/ газовые заслонки 21 и 22 закрывают нижнее 20 и осевое 23 сопла, газовый поток выходит через верхнее сопло 19 и отклоняет хвостовую часть ЛА вниз. При закрытых верхнем и нижнем соплах управляющее действие, как было отмечено выше, отсутствует, но под действием газового потока через осевое сопло 23 ЛА будет перемещаться вперед. Если подобный эффект необходимо исключить, заслонки 21 и 22 проводятся в заднее положение, как показано на позиции г/, и запирают осевое сопло 23. Реактивные моменты верхнего и нижнего сопел при этом взаимно компенсируются, управляющее действие отсутствует, но отсутствует и продольное перемещение ЛА.
Газоструйная система управления ЛА в горизонтальной плоскости оказана на фиг.4 /вид сверху/ и представляет собой сопло с отклоняющимися створками 24, ось вращения которых расположена на вращающемся вокруг осевого сопла кольце 25. В рассматриваемом примере при наличии рассмотренной ранее системы управления ЛА в вертикальной плоскости в системе горизонтального управления в вертолетном режиме реализуются только две возможности - повороты ЛА по и против часовой стрелки. Эти две возможности реализуются при отклонении створок 24, например, справа налево и слева направо, для чего кольцо 25 поворачивают вокруг осевого сопла на 180 градусов. Однако в принципе рассматриваемая система управления обладает свойством универсальности и может обеспечить отклонение хвостовой части ЛА на любой угол.
В целом механизмы заявляемого безаэродромного ЛА с поворотной нижней плоскостью функционируют следующим образом.
При вертикальном взлете ЛА осевые сопла маршевых ТРД перекрывают газовыми заслонками 16 и подъем ЛА производится только на основе турбовентиляторов 4 и 5. При достижении заданной высоты в зависимости от особенностей взлетной площадки производится поворот турбовентиляторов 4 вокруг поперечной оси и изменение их вектора тяги и начальный разгон ЛА производится на основе создаваемой ими продольной пропульсивной составляющей. По мере увеличения скорости ЛА и возникновения аэродинамической подъемной силы на верхней несущей плоскости 2 заслонки 16 поворачивают и направляют газовый поток в осевые сопла ТРД, вследствие чего горизонтальная скорость ЛА возрастает. При достижении скорости, обеспечивающей полет ЛА только на основе верхней несущей плоскости, заслонками 16 полностью перекрывают боковые отверстия 9 сопел маршевых ТРД, нижние полуплоскости выводят из зацепления с крепежными узлами 8, поворачивают их размещению в нишах 7 фюзеляжа.
При вертикальной посадке механизмы ЛА переводятся в вертолетный режим, для чего снижается скорость полета, нижние полуплоскости выводятся из бортовых ниш 7, производятся их поворот и зацепление с ТРД через крепежные узлы 8, заслонками 16 перекрывают осевые сопла ТРД 3, выдвигают воздухозаборники 18, запускают хвостовой ТРД 17, если он был остановлен, и дальнейший полет и посадочные маневры производят только на основе турбовентиляторов 4 и 5.
Вариант безаэрадромного ЛА с неподвижной подъемно-несущей плоскостью показан на фиг.5. Нижняя подъемно-несущая плоскость 1 содержит турбовентиляторы 4 и газонесущий трубопровод 10, соединяющий турбины вентиляторов с газогенератором - маршевым ТРД 3, расположенным в рассматриваемом примере поверх фюзеляжа. Турбовентиляторы 4 снабжены поворотным механизмом /не показан/, позволяющим поворачивать на некоторый угол вокруг трубчатых осей 26, через которые производится подвод потока на лопатки турбин, что создает получать кроме вертикальной также и горизонтальную тягу в вертолетном режиме полета. В скоростном горизонтальном полете турбовентиляторы 4 после их отключения закрываются сверху и снизу выдвижными обтекателями 27, выполненными в виде пластинчатых щитков.
Для обеспечения функционирования маршевого ТРД в режиме газогенератора он снабжен механизмом управления газовым потоком в виде простого разветвляющегося сопла, показанного на фиг.2. На позиции а/ газовая заслонка 16 запирает входное отверстие в питающий турбовентиляторы подводящий трубопровод 10, что соответствует скоростному режиму маршевого полета, на позиции б/ газовая заслонка 16 запирает осевое сопло маршевого ТРД и газовый поток, проходя через газоподводящий трубопровод 10, действует только на лопатки турбин вентиляторов, что соответствует вертолетному режиму полета ЛА.
Управление ЛА в вертолетном режиме производится с помощью отдельного ТРД 17, размещенного в хвостовой части фюзеляжа и снабженного выдвижным воздухозаборником 18. Выходная часть ТРД 17 представляет собой двойное разветвляющееся сопло, показанное на фиг.3. На позиции а/ верхнее 19 и нижнее 20 сопла закрыты газовыми заслонками 21 и 22 и газовый поток проходит через осевое сопло 23, т.е. управляющее действие отсутствует. На позиции б/ нижнее сопло 20 открыто, а осевое 23 и верхнее 19 сопла закрыты, вследствие чего хвостовая часть ЛА отклоняется вверх. На позиции в/ газовые заслонки 21 и 22 закрывают нижнее 20 и осевое 23 сопла, газовый поток выходит нижнее сопло 19 и отклоняет хвостовую часть ЛА вниз.
При закрытых верхнем и нижнем соплах управляющее действие, как было отмечено выше, отсутствует, но под действием газового потока через осевое сопло 23 ЛА будет перемещаться вперед. Если подобный эффект необходимо исключить, заслонки 21 и 22 переводятся в заднее положение, как показано на позиции г/, и запирают осевое сопло 23. Реактивные моменты верхнего и нижнего сопел при этом взаимно компенсируются, управляющее действие отсутствует, но отсутствует и продольное перемещение ЛА.
Газоструйная система управления в горизонтальной плоскости показана на фиг.4 /вид сверху/ и представляет собой сопло с отклоняющимися створками 24, ось вращения которых расположена на вращающемся вокруг осевого сопла кольце 25. В рассматриваемом примере реализуется только две возможности - повороты по и против часовой стрелки на 180 градусов.
Управление по крену ЛА производится путем перераспределения газового потока от маршевого ТРД 3 между турбовентиляторами 4 двух полуплоскостей, для чего их газопроводящие трубопроводы 10 снабжены газовыми заслонками, которые позволяют изменить сечение газопроводов.
В целом механизмы рассматриваемого безаэродромного ЛА с неподвижной подъемно-несущей нижней плоскостью функционируют следующим образом.
При вертикальном взлете обтекатели 27 /фиг.5/ убираются в ниши 23, воздухозаборники 18 выдвигаются из фюзеляжа, производится запуск маршевого и хвостового двигателей, поворотом газовой заслонки 16 перекрывают осевое сопло ТРД 3 и открывают боковой выход для газового потока в подводящие газопроводы 10. После набора высоты поворотом турбовентиляторов 4 изменяют их вектор тяги и производят горизонтальный разгон ЛА. При достижении горизонтальной скорости, необходимой для создания аэродинамической подъемной силы на верхней несущей плоскости 2, заслонкой 16 перекрывают боковое газоотводное отверстие и открывают осевые сопло маршевого ТРД, обтекатели 27 выдвигают из ниш 23 и закрывают входные и выходные отверстия турбовентиляторов 4, хвостовой двигатель 17, если он не используется для повышения горизонтальной плоскости ЛА, останавливают и дальнейший полет производят только на маршевом ТРД. Подъемная сила ЛА обеспечивается только верхней несущей плоскостью 2.
Вариант безаэродромного ЛА с подвесной нижней плоскостью приведен на фиг.6 /вид спереди/. На фиг.6 приведен ЛА с двумя ТРД 3, расположенными на верхней несущей плоскости 2. В рассматриваемом примере подвесные нижние полуплоскости 29 выполнены в виде подъемных платформ, содержащих турбовентиляторы 4, связанные с верхней плоскостью 2 через консоли 30. Подъемная платформа нижних полуплоскостей 29 приведена на фиг.7. Она содержит два турбовентилятора 4 с возможностью изменения направления вектора тяги путем поворота вокруг трубчатых осей 26 и цапф 31. Кроме того, подъемная платформа в целом может поворачиваться на некоторый угол вокруг продольной относительно ЛА оси на цапфах 32. С этой целью оконечные части газоподводящего трубопровода 10 оснащены стыковочными поворотными узлами 33 с уплотнительными кольцами, обеспечивающими газодинамическую связь маршевого ТРД 3 - газогенератора и турбовентиляторов 4 в любом их положении. Предлагаемое техническое решение позволяет изменить вектор тяги турбовентиляторов 4 как в продольном, так и в поперечном относительно ЛА направлениях и обеспечить вертолетные маневры в полном объеме.
Как видно из фиг.6, длина газоподводящего трубопровода 10 практически равна высоте консоли 30, что существенно снижает величину потерь полного давления в газовой магистрали. Необходимость кольцевания газовой магистрали через верхнюю несущую плоскость 2 для обеспечения большей надежности газового привода турбовентиляторов не изменяет величину потерь, так и при нормальном функционировании маршевых ТРД в качестве газогенераторов объединительная часть газовой магистрали не работает, она служит только для некоторого выравнивания динамических характеристик приводного газового потока.
Для обеспечения функционирования маршевых ТРД в режиме газогенераторов они снабжены механизмом управления газовым потоком в виде простого разветвляющегося сопла, показанного на фиг.2. На позиции а/ газовая заслонка 16 запирает входное отверстие в подводящий трубопровод 10, что соответствует скоростному маршевому полету, на позиции б/ газовая заслонка запирает осевое сопло маршевого ТРД, и газовый поток проходит через газоподводящий трубопровод 10 и действует только на лопатки турбин вентиляторов, что соответствует вертолетному режиму полета ЛА.
Управление ЛА в вертолетном режиме производится с помощью отдельного ТРД, размещенного в хвостовой части фюзеляжа и снабженного выдвижными воздухозаборниками. Входная часть ТРД представляет собой двойное разветвляющееся сопло, приведенное на фиг.3. На позиции а/ верхнее 19 и нижнее 20 сопла закрыты газовыми заслонками 21 и 22, и газовый поток проходит через осевое сопло 23, т.е. управляющее действие отсутствует. На позиции б/ нижнее сопло открыто, а осевое 23 и верхнее 19 сопла закрыты, вследствие чего хвостовая часть ЛА отклоняется вверх. На позиции в/ газовые заслонки 21 и 22 закрывают нижнее 20 и осевое 23 сопла, газовый поток выходит через верхнее сопло 19 и отклоняет хвостовую часть ЛА вниз.
При закрытых верхнем и нижнем соплах управляющее действие, как было отмечено выше, отсутствует, но под действием газового потока через осевое сопло 23 ЛА будет перемещаться вперед. Если подобный эффект не желателен, заслонки 21 и 22 переводятся в заднее положение, как показано на позиции г/, запирают осевое сопло 23. Реактивные моменты верхнего и нижнего сопел при этом взаимно компенсируются, управляющее действие отсутствует, но отсутствует и продольное перемещение ЛА.
Газоструйная система управления в горизонтальной плоскости показана на фиг.4 /вид сверху/ и представляет собой сопло с отклоняющимися створками 24, ось вращения которых расположена на вращающемся вокруг осевого сопла кольце 25. В рассмотренном примере реализуются только две возможности - повороты по и против часовой стрелки на 180 градусов, однако в принципе эта система может обеспечить поворот ЛА на любой угол.

Изобретение относится к летательным аппаратам со свойствами самолета и вертолета. Летательный аппарат выполнен по схеме биплан с нижней подъемно-несущей в вертолетном режиме плоскостью, содержащей полуплоскости с встроенными турбовентиляторами с управляемым вектором тяги с газовым приводом от маршевых турбореактивных двигателей в качестве газогенераторов. Безаэродромный летательный аппарат выполнен в трех вариантах с поворотной, неподвижной и подвесной нижними подъемно-несущими плоскостями. Первый вариант содержит две подъемно-несущие полуплоскости, снабженные поворотными механизмами. Во втором варианте схема биплан остается как в вертолетном, так и в самолетном режимах, но в скоростном горизонтальном полете входные и выходные отверстия турбовентиляторов закрываются выдвижными щитками-обтекателями. Третий вариант содержит подъемно-несущие полуплоскости, подвешенные к верхней плоскости на консолях в виде подъемных платформ с встроенными турбовентиляторами, причем подъемные платформы снабжены механизмом поворота на некоторый угол вокруг продольной относительно летательного аппарата оси. Для создания продольной тяги турбовентиляторы снабжены поворотным механизмом вокруг поперечной относительно летательного аппарата оси. Для повышения надежности функционирования нижних подъемно-несущих полуплоскостей приводные трубопроводы от маршевых турбореактивных двигателей-газогенераторов объединены в единую газоподводящую систему. В первом и в третьем вариантах длина газоподводящих трубопроводов определяется в основном высотой консолей. Механизм управления безаэродромным летательным аппаратом в вертолетном режиме содержит хвостовой турбореактивный двигатель в качестве газогенератора и связанные с ним рулевые сопла, с возможностью управления летательным аппаратом в вертикальной и горизонтальной плоскостях полета на основе единой газоструйной системы. Техническим результатом заявленного изобретения является создание летательного аппарата с возможностью вертикального взлета и посадки, вертикальных маневров и скоростного горизонтального полета. 5 н. и 12 з.п. ф-лы, 7 ил.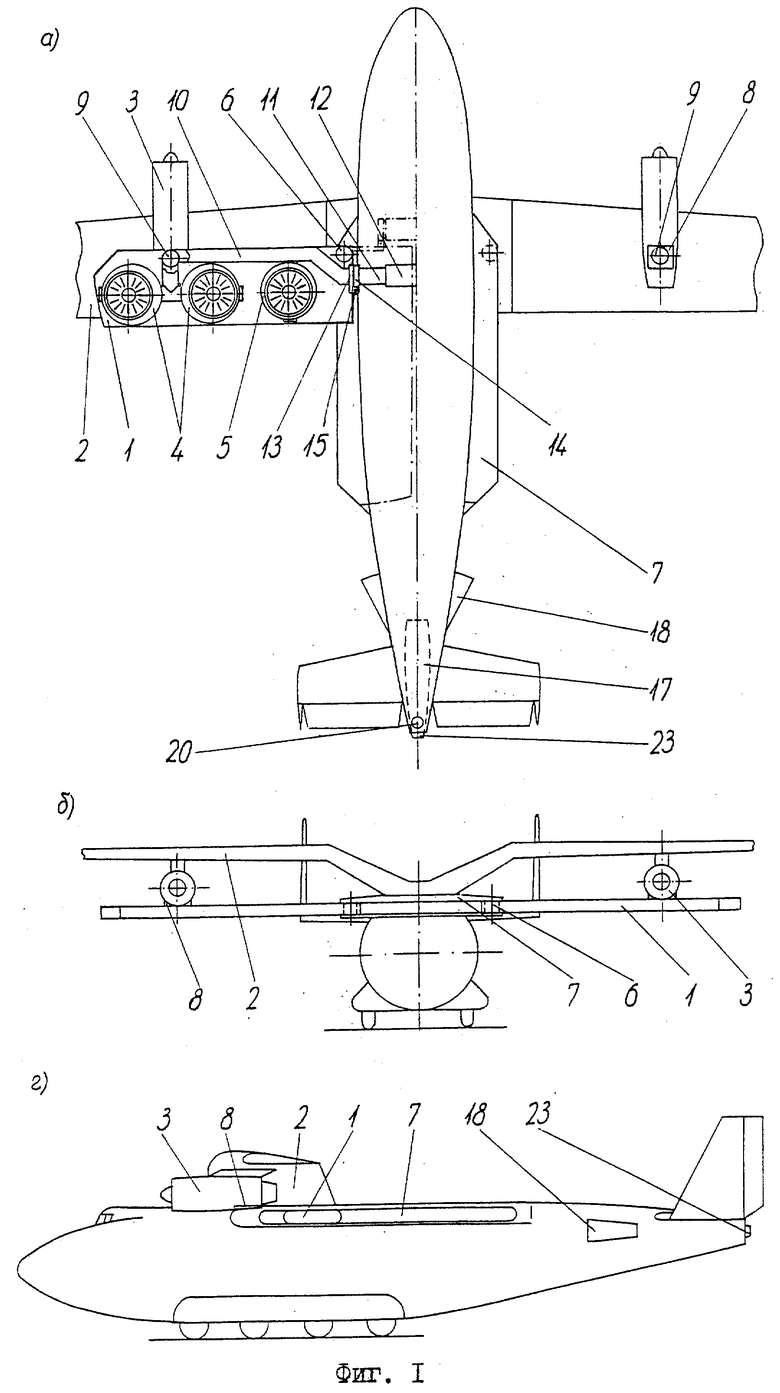
| САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 1996 |
|
RU2103199C1 |
| ПОВОРОТНОЕ СОПЛО ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 1977 |
|
SU716229A3 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ИЛИ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 1994 |
|
RU2086477C1 |
| US 6375095 А, 23.04.2002. | |||

