Изобретение относится к области охранной сигнализации, более конкретно к магнитометрическим устройствам (средствам, извещателям) обнаружения нарушителя и направления его движения, основанным на пассивном способе регистрации изменений магнитного поля, вызванных его пересечением охраняемого рубежа, и может быть использовано для скрытного сигнализационного блокирования периметра или рубежа охраняемого объекта. Такие магнитометрические устройства формируют объемную зону обнаружения вдоль рубежа и вырабатывают выходной сигнал тревоги при вторжении в нее нарушителей, имеющих при себе или в своем составе ферромагнитные части или предметы, обладающие остаточной или наведенной намагниченностью (например, инструмент, оружие, листы железа).
В магнитометрических устройствах для охранной сигнализации нарушитель обнаруживается по вносимым им изменениям в существующее магнитное поле Земли, контролируемое в зоне обнаружения с помощью распределенного пассивного индукционного магнитометрического датчика (чувствительного элемента), обычно размещенного в грунте. Датчик конфигурируется так, чтобы его проводники образовывали пространственно-распределенный контур, чувствительный к изменению магнитного потока (вызываемого нарушителем), которое по принципу электромагнитной индукции преобразуется в сигнал напряжения. Контур, как правило, имеет дифференциальную структуру или балансировку, уменьшающую действие мощных «дальних» электромагнитных помех, практически не ослабляя полезные сигналы, вызываемые нарушителем в «ближней» зоне обнаружения. Датчиком может являться: 1) соленоид, намотанный вокруг и вдоль ферромагнитного сердечника, периодически изменяя на противоположное направление намотки, образующий вдоль рубежа охраны «однолинейную» структуру [1]; 2) плоский (планарный) «8»-образный контур с перекрестиями, образующий вдоль рубежа охраны двухлинейную структуру [2]; 3) два планарных «U»-образных контура, включенных дифференциально, образующих вдоль рубежа трехлинейную структуру [2].
Сигналы напряжения с датчика усиливаются, фильтруются и обрабатываются (дискриминируются) в соответствии с заданным алгоритмом обработки информации, заложенным в устройстве. Если сигналы идентифицируются как полезные, т.е. обусловленные нарушителем, то на выходе устройства формируется сигнал тревоги. Если сигналы идентифицируются как помеховые, сигнал тревоги не вырабатывается. Направление перемещения нарушителя («от нас», «к нам»; «справа - налево», «слева - направо») традиционно определяется путем пространственного разнесения двух преобразователей (зон обнаружения) на два рубежа, фиксируя последовательность появления полезных сигналов с них [3]. При этом магнитометрическое устройство для охранной сигнализации должно обладать высокой обнаружительной способностью (чувствительностью), чтобы минимизировать вероятность пропуска нарушителя, и высокой помехоустойчивостью, чтобы при воздействии различных помех природного и промышленного происхождения не вырабатывать сигналы ложных тревог.
Существует известный компромисс между обнаружительной способностью и помехоустойчивостью устройств: с повышением чувствительности при прочих равных условиях их помехоустойчивость уменьшается. Увеличение чувствительности необходимо для расширения области применения магнитометрических устройств для охранной сигнализации или увеличения классов обнаруживаемых объектов - нарушителей, полезные сигналы от которых, в первом приближении, пропорциональны величине дипольного магнитного момента, который интегрально характеризует полезные магнитные свойства нарушителей (массу, намагниченность) [2]. У людей присущий магнитный момент в среднем на 2...3 порядка меньше, чем у транспорта, поэтому их обнаружение требует увеличения чувствительности устройств обнаружения транспорта в 100 и более раз. Это неминуемо ведет к существенному возрастанию потока ложных тревог, особенно в зоне действия индустриальных электромагнитных помех.
Помехоустойчивость известных магнитометрических устройств к мощным или «близким» электромагнитным помехам (например, от высоковольтных линий электропередач, молний) остается невысокой вследствие их одновременного, но неодинакового воздействия как на различные части, так и в целом на оба разнесенных друг от друга распределенных датчика. Пространственный градиент таких помех высок, так что дифференциальная структура датчика хотя и ослабляет их, но недостаточно. Фильтрация также не приводит к их существенному ослаблению, поскольку такие помехи, как правило, являются широкополосными. Использование двух пространственно разнесенных датчиков (при определении направления движения) имеет недостаток в том, что ввиду технологического разброса конструкционных параметров, различий амплитудно-частотных характеристик усилителей и фильтров, помеховые отклики с двух датчиков могут иметь различную амплитуду, сопровождаться случайными фазовыми искажениями, задержками по фронту. Поэтому известные корреляционные методы отстройки (например, по одновременности появления) оказываются недостаточно эффективными.
Известно магнитометрическое устройство для охранной сигнализации, содержащее два индукционных сигнальных датчика, усилители, полосовые фильтры, пороговые элементы, логические элементы И, ИЛИ, блоки памяти, дифференциатор (по сути - одновибратор) [4]. Устройство предназначено для пассивного обнаружения намагниченных объектов (преимущественно транспорта), перемещающихся через охраняемый рубеж в заданном направлении. Сигнальные датчики в виде плоских двухлинейных «8»-образных проводных контуров заглублены в грунт и разнесены на некоторое расстояние А вдоль маршрута вероятного перемещения (дороги). Объект-нарушитель, двигающийся со скоростью не более Vмакс, последовательно пересекает обе зоны обнаружения, вызывая появление полезных сигналов сначала на выходе одного, а затем на выходе другого датчика. Эти сигналы усиливаются, фильтруются, дискриминируются по амплитуде пороговыми элементами и далее поступают на соответствующие блоки памяти. Последние вырабатывают, по сути, единственные «длинные» импульсы с каждого датчика в ответ на однократное перемещение объекта. Временная последовательность или задержка появления этих импульсов (с выхода пороговых элементов) несет информацию о направлении движения намагниченного объекта. Дифференциатор вырабатывает «короткий» импульс длительностью менее чем τ=А/Vмакс, обеспечивая регистрацию объектов, перемещающихся только в одном направлении. Отстройка от воздействия помех обеспечивается «8»-образной дифференциальной конфигурацией датчиков и выбором оптимального диапазона регистрируемых частот.
Недостатком этого устройства является его низкая помехоустойчивость к мощным электромагнитным помехам, неодинаковым образом воздействующим на оба датчика, которые могут быть вызваны, например, близкорасположенными линиями электропередач, электрифицированными железными дорогами, электромагнитными полями от близких гроз [5]. Помехи с большим пространственным градиентом в принципе не могут быть скомпенсированы в самом индукционном датчике, поскольку уменьшение его размеров, снижающее действие помехи, ведет к уменьшению чувствительности датчика и зоны обнаружения устройства.
Реально достижимая на местности степень балансировки планарного индукционного «8»-образного датчика составляет около 40 дБ [2]. Поэтому даже значительные изменения в магнитном поле Земли, вызываемые магнитными бурями, в 100 и более раз превышающим величину порога обнаружения, будут приводить к ложным тревогам устройства.
Неизбежные конструкционно-технологические различия, такие как чувствительность и степень балансировки датчиков, усиление усилителей, постоянные времени полосовых фильтров, величины порогов элементов, ухудшают помехоустойчивость устройства в случае действия мощных электромагнитных помех.
В силу низкой помехоустойчивости использовать данное устройство (путем увеличения усиления) для обнаружения вооруженных людей не представляется возможным, что сужает область его применения. Поскольку выходной сигнал с индукционного датчика пропорционален скорости изменения магнитного потока или скорости движения объектов обнаружения, то при малой скорости их движения возможны пропуски тех, которые обладают относительно малым магнитным моментом (например, велосипеды).
Наиболее близким аналогом (прототипом) по технической сущности к заявляемому изобретению является магнитометрическое устройство для обнаружения транспорта и определения направления их движения [6]. Устройство содержит первый и второй «однолинейные» индукционные дифференциальные сигнальные датчики (условно правый - первый и левый - второй), размещенные в грунте или полотне дороги вдоль направления движения транспорта на некотором расстоянии А друг от друга. Каждый из них подсоединен к последовательно включенным схеме защиты, усилителю, полосовому фильтру, второму усилителю и детектору наклона. Сигналы с детекторов наклона поступают одновременно на четыре пороговых элемента (ПЭ), которые осуществляют их амплитудную дискриминацию относительно двух равных, но различных по знаку порогов: +П0 и -П0. В ответ на пересечение зоны обнаружения транспортом и генерирование сигналов с выходов датчиков пороговые элементы выдают последовательности импульсов. Сигналы с выходов двух детекторов наклона и импульсные последовательности с пороговых элементов поступают в цифровой процессор, который управляет работой исполнительного узла, предназначенного для выдачи выходных сигналов тревоги.
Цифровой процессор включает: системный таймер, определяющий время анализа значимых сигналов с датчиков; детекторы пересечения нуля - пороговые элементы с нулевым порогом для определения моментов времени, когда полезные сигналы максимальны; двухполупериодный выпрямитель для управления таймером; логические элементы И; счетчик импульсов, а также другие цифровые узлы и элементы, необходимые для реализации заложенного в устройство алгоритма обработки сигналов, основанного на счете импульсов во временном интервале наличия значимого (т.е. превышающего шум в несколько раз) сигнала с любого датчика.
Направление движения определяется благодаря временной задержке между последовательностями сигнальных выбросов с датчиков. Временные сигнатуры (формы) сигналов с датчиков похожи друг на друга вследствие параллельного переноса (в зоне обнаружения) основной ферромагнитной массы объекта обнаружения (например, железный корпус и рама - для транспорта) и разделяются во времени задержкой:

где V - скорость движения объекта. Эта «похожесть» сигнатур не абсолютная, поскольку вращающиеся или колеблющиеся металлические части объекта (например, колеса) вносят различный вклад в суммарный сигнал в точках размещения сигнальных датчиков.
Инициирование определения направления производится при совпадении однополярных импульсов, поступающих с двух датчиков, что является следствием сравнимости длины обнаруживаемого объекта с величиной А. Транспорт в процессе своего движения в определенный момент времени (соответствующий приблизительно середине расстояния А) воздействует на оба датчика. В случае удовлетворения условиям обнаружения, исполнительный узел выдает сигналы тревоги, свидетельствующие о движении объекта-нарушителя либо в направлении «1→2», либо «2→1».
У прототипа и заявляемого изобретения имеются следующие сходные существенные признаки: магнитометрический способ обнаружения; двухрубежный способ определения направления движения; устанавливаемые в грунт (или дорожное полотно) два индукционных распределенных дифференциальных сигнальных датчика; две пассивные схемы для защиты устройства от перенапряжений и фильтрации высокочастотных помех с датчиков; два усилителя для усиления сигналов с датчиков до приемлемого уровня; два полосовых фильтра, формирующие полосу регистрируемых частот с наклоном - 6 дБ/октава; четыре пороговых элемента (ПЭ), попарно осуществляющие амплитудную дискриминацию сигналов с двух датчиков на уровнях +П0 и -П0; пороговый элемент, осуществляющий амплитудную дискриминацию сигналов на нулевом уровне; два логических элемента И.
Помехоустойчивость устройства по сравнению с предыдущим аналогом увеличена за счет применения: «однолинейных» индукционных сигнальных датчиков, степень балансировки которых выше [2]; принципа подсчета импульсов (не менее 2-х с каждого канала обработки); фильтрации сигналов с применением интегратора (в диапазоне регистрируемых частот), устраняющего влияние амплитуды сигналов от скорости движения намагниченных объектов и уменьшающего действие более высокочастотных помех.
Тем не менее, прототип обладает низкой помехоустойчивостью к мощным электромагнитным помехам, в том числе с высоким пространственным градиентом, вследствие неодинакового их влияния на датчики и отсутствия в устройстве устойчивых информационных признаков различения полезных сигналов и помех, в том числе по одновременности их поступления, взаимообразной полярности, длительности. В прототипе отсутствует пространственная корреляция между сигнатурами полезных сигналов и величиной А. При уменьшении расстояния А временные сигнатуры сигналов с датчиков будут «сливаться», а при увеличении А - «разбегаться». Сигнатуры полезных сигналов с датчиков определяются исключительно скоростью движения объекта и распределением намагниченности по его объему.
Низкая помехоустойчивость обусловливает большой поток ложных тревог, не позволяет увеличить чувствительность устройства для обеспечения обнаружения объектов, обладающих меньшим магнитным моментом (например, вооруженные люди, велосипедисты).
Предлагаемым изобретением решается задача повышения помехоустойчивости устройства. Технический результат, получаемый при осуществлении изобретения, - существенное уменьшение числа ложных тревог устройства и расширение области его применения, в том числе для обнаружения объектов с меньшим, чем транспорт, магнитным моментом.
Для достижения указанного технического результата в устройство, содержащее первый и второй дифференциальные сигнальные датчики, последовательно включенные первую схему защиты, первый усилитель и первый полосовой фильтр, выход которого одновременно подключен к входу первого и второго пороговых элементов, последовательно включенные вторую схему защиты, второй усилитель и второй полосовой фильтр, выход которого одновременно подключен к входу третьего и четвертого пороговых элементов, а также пятый пороговый элемент, первый и второй элементы И, дополнительно введены недифференциальный датчик помехи, охватывающий по площади оба сигнальных датчика, последовательно включенные третья схема защиты, третий усилитель и третий полосовой фильтр, последовательно включенные первый элемент ИЛИ и первый дискриминатор длительности импульса, последовательно включенные второй элемент ИЛИ и второй дискриминатор длительности импульса, первый и второй детекторы огибающей, последовательно включенные третий детектор огибающей и инвертирующий усилитель, третий элемент ИЛИ, аналоговый сумматор, узел разрешения, узел счета, анализатор, первый и второй одновибраторы, последовательно включенные четвертый элемент ИЛИ и третий одновибратор, причем шесть одинаковых сегментов кабеля, содержащих количество N, равное 2, внутренних изолированных проводников, расположенных в одной плоскости попарно и последовательно вдоль первой, второй и третьей линии рубежа охраны на одинаковом расстоянии друг от друга, образуют магнитометрический индукционный чувствительный элемент, содержащий оба сигнальных датчика и датчик помехи, которые формируются путем соответствующей коммутации внутренних проводников на концах сегментов, при этом первые внутренние проводники первого, второго, четвертого и пятого сегментов, лежащие вдоль первой и второй линии, подключенные последовательно друг к другу на своих концах, расположенных на концах и середине рубежа охраны, образуют одновитковый «8»-образный дифференциальный первый сигнальный датчик, подключенный своим началом и концом к первой схеме защиты, а средней точкой - к шине нулевого потенциала, второй внутренний проводник второго сегмента, первый внутренний проводник третьего сегмента, второй внутренний проводник пятого сегмента и первый внутренний проводник шестого сегмента, лежащие вдоль второй и третьей линии, подключенные последовательно на своих концах друг к другу, образуют одновитковый «8»-образный дифференциальный второй сигнальный датчик, подключенный своим началом и концом ко второй схеме защиты, а средней точкой - к шине нулевого потенциала, вторые внутренние проводники первого, третьего, шестого и четвертого сегментов, лежащие вдоль первой и третьей линий, подключенные последовательно на своих концах друг к другу, образуют одновитковый «О»-образный недифференциальный датчик помехи, подключенный своим началом и концом к третьей схеме защиты, а средней точкой - к шине нулевого потенциала, выход первого полосового фильтра подключен также к входу первого детектора огибающей, выход которого подключен к первому входу аналогового сумматора, выход второго полосового фильтра подключен также к входу второго детектора огибающей, выход которого подключен к второму входу аналогового сумматора, выход третьего полосового фильтра подключен к входу третьего детектора огибающей, а выход инвертора подключен к третьему входу аналогового сумматора, выход первого порогового элемента подключен одновременно к первому входу первого элемента ИЛИ и первому входу второго элемента И, выход второго порогового элемента подключен одновременно к второму входу первого элемента ИЛИ и первому входу первого элемента И, выход третьего порогового элемента подключен одновременно к первому входу второго элемента ИЛИ и второму входу первого элемента И, выход четвертого порогового элемента подключен одновременно к второму входу второго элемента ИЛИ и второму входу второго элемента И, выходы первого и второго элементов И подключены соответственно к первому и второму входам третьего элемента ИЛИ, выход которого подключен к первому входу узла разрешения, выходы первого и второго дискриминаторов длительности импульса подключены соответственно к первому и второму входам узла счета, выход аналогового сумматора подключен к входу пятого порогового элемента, выход которого подключен к второму входу узла разрешения, выход которого подключен к пятому входу анализатора, к первому, второму, третьему и четвертому входам которого подключены соответственно первый, второй, третий и четвертый выходы узла счета, первый выход анализатора подключен к входу первого одновибратора, выход которого подключен к первому входу четвертого элемента ИЛИ и является первым выходом устройства, второй выход анализатора подключен к входу второго одновибратора, выход которого подключен к второму входу четвертого элемента ИЛИ и является первым выходом устройства, выход третьего одновибратора подключен к входу сброса узла счета.
В варианте исполнения устройства количество N внутренних изолированных проводников в шести сегментах кабеля, формирующих магнитометрический индукционный чувствительный элемент, равно 2К, где К равно 1, 2, 3 и так далее, образуя К-витковые первый и второй дифференциальные сигнальные датчики и К-витковый недифференциальный датчик помехи.
В другом варианте исполнения устройства магнитометрический индукционный чувствительный элемент формируется из шести сегментов кабеля, содержащего N внутренних изолированных проводников, образуя N-витковые первый и второй сигнальные датчики и N-витковый датчик помехи, причем первый и второй «8»-образные сегменты кабеля, расположенные вдоль первой и второй прямых с перекрестием в середине сегмента, конфигурируются так, чтобы их внутренние проводники при коммутации в середине рубежа охраны образовывали первый дифференциальный сигнальный датчик со средней точкой, третий и четвертый «8»-образные сегменты кабеля, расположенные по второй и третьей прямым вдоль рубежа, конфигурируются так, чтобы их внутренние проводники при коммутации в центре рубежа образовывали второй дифференциальный сигнальный датчик со средней точкой, пятый и шестой «U»-образные сегменты кабеля, расположенные по первой и третьей прямым вдоль рубежа, конфигурируются таким образом, чтобы их внутренние проводники при коммутации в центре рубежа образовывали недифференциальный датчик помехи со средней точкой.
В варианте исполнения устройства узел разрешения содержит последовательно включенные третий элемент И и четвертый одновибратор, а также третий дискриминатор длительности импульса, выход его подключен к первому входу третьего элемента И, вход его является первым входом узла разрешения, вторым входом которого является второй вход третьего элемента И, выходом узла разрешения является выход четвертого одновибратора, который подключен к входу сброса третьего дискриминатора длительности импульса.
В варианте исполнения устройства узел счета содержит последовательно включенные элемент «исключающее ИЛИ», четвертый дискриминатор длительности импульса и седьмой одновибратор, а также первый и второй дискриминаторы межимпульсной паузы, пятый и шестой одновибраторы, пятый элемент ИЛИ, первый и второй счетчики импульсов, первый и второй триггеры, причем входы первого дискриминатора межимпульсной паузы и пятого одновибратора объединены и являются первьм входом узла счета, входы второго дискриминатора межимпульсной паузы и шестого одновибратора объединены и являются вторым входом узла счета, выход первого дискриминатора межимпульсной паузы подключен к первому входу пятого элемента ИЛИ, выход второго дискриминатора межимпульсной паузы подключен ко второму входу пятого элемента ИЛИ, третий вход пятого элемента ИЛИ является входом сброса узла счета, выход пятого одновибратора подключен одновременно к входу первого триггера, первому входу элемента «исключающее ИЛИ» и входу первого счетчика импульсов, выход шестого одновибратора подключен одновременно к входу второго триггера, второму входу элемента «исключающее ИЛИ» и входу второго счетчика импульсов, выход седьмого одновибратора подключен одновременно к тактовьм входам первого и второго триггеров, входам сброса первого и второго счетчика импульсов, а также входу восьмого одновибратора, выход пятого элемента ИЛИ подключен к входу сброса седьмого одновибратора, выход восьмого одновибратора одновременно подключен к входам сброса первого и второго триггеров, первым и вторым выходами узла счета являются соответственно выходы первого и второго триггеров, а третьим и четвертым выходами узла счета являются соответственно выходы первого и второго счетчиков импульсов.
В варианте исполнения устройства анализатор содержит четвертый, пятый и шестой элементы И, первый вход анализатора есть первый вход пятого элемента И, второй вход анализатора есть первый вход шестого элемента И, третий и четвертый входы анализатора есть соответственно первый и второй входы четвертого элемента И, выход которого подключен одновременно ко вторым входам пятого и шестого элементов И, пятый вход анализатора подключен одновременно к третьим входам пятого и шестого элементов И, выход пятого элемента И есть первый выход анализатора, а выход шестого элемента И есть второй выход анализатора.
Признаки, относящиеся к вариантам исполнения устройства, являются уточняющими и дополняющими, поэтому они отражены в формуле изобретения в дополнительных пунктах. Сущность изобретения, в том числе его дополняющих и уточняющих признаков, будет более понятна из нижеследующего описания.
Предлагаемое устройство иллюстрируется графическими материалами, представленными на фиг.1-12. На фиг.1 изображена схема магнитометрического индукционного чувствительного элемента (ЧЭ), включающего одновитковые сигнальные датчики и датчик помехи; на фиг.2 - структурная схема магнитометрического устройства для охранной сигнализации; на фиг.3 - схема варианта ЧЭ, включающего многовитковые (трехвитковые) сигнальные датчики и датчик помехи; на фиг.4 - схема другого варианта ЧЭ с «8»-образными и «О»-образными сегментами, формирующими двухвитковые сигнальные датчики и датчик помехи; на фиг.5 - структурная схема варианта узла разрешения, на фиг.6 - структурная схема варианта узла счета, на фиг.7 - структурная схема варианта анализатора. На фиг.8 -12 изображены сигнатуры (временные диаграммы) сигналов в устройстве при воздействии соответственно: нарушителя, двигающегося по направлению «1→2»; нарушителя, двигающегося по направлению «2→1»; мощных электромагнитных помех импульсного характера; долговременной электромагнитной помехи флуктуационного характера; нарушителя, двигающегося по направлению «1→2» во время действия импульсных помех.
На схеме (фиг.1) магнитометрического индукционного чувствительного элемента приведены следующие обозначения: 7- магнитометрический чувствительный элемент (ЧЭ); 1, 2, 3, 4, 5, 6 - соответственно первый, второй, третий, четвертый, пятый и шестой одинаковые сегменты кабеля длиной L/2, где L - длина охраняемого рубежа, каждый из которых содержит N=2 изолированных внутренних проводников; 100, 200, 300 - соответственно первая крайняя, вторая средняя и третья крайняя линии рубежа охраны, отстоящие друг от друга на одинаковое расстояние А, вдоль которых расположены соответственно первый и четвертый, второй и пятый, третий и шестой сегменты кабеля; 11, 12 - соответственно первый и второй (последний) внутренние проводники первого сегмента; 21, 22 - соответственно первый и второй (последний) внутренние проводники второго сегмента; 31, 32 - соответственно первый и второй (последний) внутренние проводники третьего сегмента; 13, 14 - соответственно первый и второй (последний) внутренние проводники четвертого сегмента; 23, 24 - соответственно первый и второй (последний) внутренние проводники пятого сегмента; 33, 34 - соответственно первый и второй (последний) внутренние проводники шестого сегмента; 15 - начало одновиткового «8»-образного дифференциального первого сигнального датчика 10, образованного последовательным соединением внутренних проводников 11, 21, 13 и 23, а 17 и 16 - соответственно конец и средняя точка первого сигнального датчика; 25 - начало одновиткового «8»-образного дифференциального второго сигнального датчика 20, образованного последовательным соединением внутренних проводников 22, 31, 24 и 33, а 27 и 26 - соответственно конец и средняя точка второго сигнального датчика; 35 - начало одновиткового «О»-образного недифференциального датчика помехи 30, образованного последовательным соединением внутренних проводников 12, 32, 34 и 14, а 37 и 36 - соответственно конец и средняя точка датчика помехи. Стрелками с символами «1→2» и «2→1» обозначены возможные направления движения нарушителя.
На фиг.2 цифровые обозначения 7, 10, 15, 16, 17, 20, 25, 26, 27, 30 - те же, что на фиг.1; 40, 41 и 42 - соответственно первая, вторая и третья схема защиты; 44, 45 и 46 - соответственно первый, второй и третий усилитель; 46, 47 и 48 - соответственно первый, второй и третий полосовые фильтры; 49, 50, 51 и 52 - соответственно первый, второй, третий и четвертый пороговые элементы (ПЭ); 53, 54 и 55 - соответственно первый, второй и третий детекторы огибающей; 56 и 59 - соответственно первый и второй элементы ИЛИ; 57 и 58 - соответственно первый и второй элементы И; 60 - инвертирующий усилитель, 61 и 63 - соответственно первый и второй дискриминаторы длительности импульса; 62 - третий элемент ИЛИ; 64 - аналоговый сумматор; 65 - пятый пороговый элемент; 66, 67 и 69 - соответственно первый, второй и третий одновибраторы (ОВ); 68 - четвертый элемент ИЛИ; 70 - узел разрешения, 80 - узел счета; 90 - анализатор; 103 и 104 - соответственно первый и второй входы узла разрешения 70; 105 и 106 - соответственно первый и второй входы узла счета 80; 108 - вход сброса узла счета 80; 18, 19, 28, 29 и 107 - соответственно первый, второй, третий, четвертый и пятый входы анализатора 90; 38 и 39 - соответственно первый и второй выходы анализатора; 102 - первый выход устройства, соответствующий обнаружению движения нарушителя в направлении «1→2», 201 - второй выход устройства, соответствующий обнаружению движения нарушителя в направлении «2→1».
На фиг.3 цифровые обозначения 1-7, 11-17, 21-27, 31-37, 100, 200, 300 - те же, что на фиг.1. При этом 12, 22, 32, 14, 24, 34 - последние (шестые) внутренние проводники соответственно прямолинейных сегментов 1, 2, 3, 4, 5, 6 многожильного кабеля.
На фиг.4 цифровые обозначения 1-7, 11-17, 21-27, 31-37, 100, 200, 300 - те же, что на фиг.1. При этом 1 и 2 - соответственно первый и второй «8»-образные сегменты с перекрестием посередине, расположенные вдоль прямых 100 и 200, из которых формируется многовитковый (двухвитковый) дифференциальный первый сигнальный датчик 10; 3 и 4 -соответственно третий и четвертый «8»-образные сегменты с перекрестием посередине, расположенные вдоль прямых 200 и 300, из которых формируется многовитковый (двухвитковый) дифференциальный второй сигнальный датчик 20; 5 и 6 - соответственно пятый и шестой «U»-образные сегменты с перекрестием посередине, расположенные вдоль прямых 100 и 300, из которых формируется многовитковый (двухвитковый) недифференциальный датчик помехи 30.
На фиг.5 цифровые обозначения 70, 103, 104, 107 - те же, что на фиг.2; 71 - третий дискриминатор длительности импульса; 72 - третий элемент И, 73 - четвертый одновибратор.
На фиг.6 цифровые обозначения 18, 19, 28, 29, 80, 105, 106, 108 - те же, что на фиг.2; 74 и 75 - соответственно первый и второй дискриминаторы межимпульсной паузы; 76 и 77 - соответственно пятый и шестой одновибраторы, 79 - схема «исключающее ИЛИ»; 81 - четвертый дискриминатор длительности импульса; 82 и 83 - соответственно первый и второй счетчики импульсов; 84 и 85 - соответственно седьмой и восьмой одновибраторы; 86 и 87 - соответственно первый и второй триггеры.
На фиг.7 цифровые обозначения 18, 19, 28, 29, 38, 39, 90, 107 - те же, что на фиг.2; 91 - четвертый элемент И; 92 и 93 - соответственно пятый и шестой элементы И.
На фиг.8-12 цифрами по оси ординат показано состояние выходов соответствующих элементов, схем, узлов устройства (фиг.2, 5, 6, 7), по оси абсцисс - время.
На схемах магнитометрического ЧЭ (фиг.1, 3, 4) не показаны коммутационные коробки, где происходит соединение внутренних проводников сегментов кабеля, поскольку они не определяют сущности изобретения. По этой же причине не показаны герметичные оболочки сегментов кабеля, а также три траншеи (в грунте или дорожном полотне) вдоль прямых 100, 200, 300, в которых на одинаковой глубине (в одной плоскости) находятся сегменты кабеля. Коммутационная коробка, с которой сигналы поступают на соответствующие схемы защиты устройства, расположена в середине рубежа охраны (на фиг.1, 3, 4), другие коробки расположены на концах рубежа охраны (на фиг.1, 3 - слева и справа). Коммутационные коробки, куда заходят концы сегментов кабеля для соединения внутренних проводников, являются герметичными, что обеспечивается сальниковыми вводами и другими мерами (например, заливкой специальным полиуретановым компаундом). Герметичные оболочки сегментов кабеля обеспечивают защиту магнитометрических датчиков от негативного воздействия влаги.
Планарность магнитометрического чувствительного элемента (т.е. нахождение всех проводников в одной плоскости) и дифференциальные свойства сигнальных датчиков по ослаблению электромагнитных помех обеспечиваются одинаковым расстоянием А (фиг.1) между линиями 100 и 200, 200 и 300 вдоль охраняемого рубежа (типично 1,5...2 м), равенством сегментов и их коммутацией строго в середине охраняемого рубежа (L/2, фиг.1, 3), перекрестием «8»-образных сегментов посередине (фиг.4), установкой сегментов кабеля в грунт (полотно дороги) на одинаковую глубину (типично 20...30 см). Магниточувствительные площади сигнальных датчиков равны между собой и составляют половину площади датчика помехи во всех вариантах исполнения ЧЭ (фиг.1, 3, 4).
На фиг.1 первый внутренний проводник 11 первого сегмента 1 на своем конце (слева) подключается к началу первого внутреннего проводника 21 второго сегмента 2, который на своем конце (в центре рубежа) подключается к началу первого внутреннего проводника 13 четвертого сегмента, который на своем конце (справа, фиг.1) подключается к началу первого проводника 23 пятого сегмента. Начало первого проводника 11 первого сегмента и конец первого проводника 23 пятого сегмента есть соответственно начало 15 и конец 17 одновиткового «8»-образного дифференциального первого сигнального датчика 10, расположенного вдоль охраняемого рубежа по линиям 100 и 200, а точка соединения внутренних проводников 21 и 13 есть средняя точка 16 этого сигнального датчика.
Первый сигнальный датчик 10 состоит, по сути, из двух одинаковых по площади одновитковых «U»-образных индукционных контуров - плеч, включенных встречно (по отношению к однородному магнитному потоку) на базе, равной L/2, и образующих, в конечном итоге, «8»-образную структуру. Такая дифференциальная структура сигнального датчика, чувствительного без потерь к перемещению намагниченных объектов в «ближней» зоне обнаружения вблизи линий 100 и 200 (типично шириной 4...6 м), обеспечивает компенсационные (ослабляющие) свойства по отношению к «дальней» электромагнитной помехе с малым пространственным градиентом, почти одинаковым образом воздействующей на оба плеча. Степень подавления или коэффициент компенсации Кк помехи зависит от вида источника помехи (точечный, однолинейный, двухлинейный) и его удаленности от ЧЭ, в большей степени определяется относительным неравенством площадей «U»-образных контуров - плеч датчика, обусловленным разбросом величины А вдоль рубежа, разбросом длин сегментов (L/2) при монтаже ЧЭ, и типично лежит в диапазоне 30...50 дБ [2]. Для максимизации полезных сигналов величина А должна соответствовать высоте проноса эквивалентного диполя над плоскостью датчика [7], либо линейному размеру «недипольного» объекта обнаружения. Чрезмерное увеличение А, не увеличивая уже полезный сигнал, приводит к пропорциональному повышению влияния электромагнитной помехи; чрезмерное уменьшение А приводит к резкому уменьшению величины полезных сигналов. Типично величина А составляет от 1,5 до 2 м, величина L - не более 300 м.
Аналогично первому сигнальному датчику 10, сформированному вдоль прямых 100 и 200, формируется второй дифференциальный сигнальный датчик 20 вдоль прямых 200 и 300. Расстояние между датчиками вдоль направления движения нарушителя составляет А, а временная задержка между полезными сигналами с двух датчиков в основном соответствует (1). Второй внутренний проводник 22 второго сегмента 2 на своем конце (слева, фиг.1) подключается к началу первого внутреннего проводника 31 третьего сегмента 3, который на своем конце (в центре рубежа) подключается к началу второго внутреннего проводника 24 пятого сегмента, который на своем конце (справа, фиг.1) подключается к началу первого проводника 33 шестого сегмента. Начало второго проводника 22 второго сегмента и конец первого проводника 33 шестого сегмента есть соответственно начало 25 и конец 27 одновиткового «8»-образного дифференциального второго сигнального датчика 20, а точка соединения внутренних проводников 31 и 24 есть его средняя точка 26.
Недифференциальный датчик помехи 30 формируется вдоль прямых 100 и 300 так, что по площади он равен сумме площадей сигнальных датчиков 10 и 20. Второй внутренний проводник 12 первого сегмента 1 на своем конце (слева, фиг.1) подключается к началу второго внутреннего проводника 32 третьего сегмента 3, который на своем конце (в центре рубежа охраны) подключается к началу второго внутреннего проводника 34 шестого сегмента, который на своем конце (справа, фиг.1) подключается к началу второго проводника 14 четвертого сегмента. Начало второго проводника 12 и конец первого проводника 33 есть соответственно начало 35 и конец 37 одновиткового «О»-образного недифференциального датчика помехи 30, а точка соединения внутренних проводников 32 и 34 есть его средняя точка 36.
На фиг.3 первый проводник 11 первого сегмента на своем конце (левый конец рубежа охраны) соединяется с началом первого проводника 21 второго сегмента, который на своем конце (в середине рубежа охраны) соединяется с первым проводником 13 четвертого сегмента, который на своем конце (правый конец рубежа) соединяется с началом первого проводника 23 пятого сегмента, который на своем конце (в середине рубежа) соединяется со вторым (не обозначенным) проводником первого сегмента, образуя первый виток первого сигнального датчика 10. Последующие аналогичные коммутации {2...К} внутренних проводников упомянутых сегментов позволяют организовать К-витковый первый сигнальный датчик 10, расположенный вдоль линий 100 и 200, где К=N/2, N - количество внутренних проводников в сегментах кабеля. Подобным образом образуются К-витковый второй сигнальный датчик 20 из {К+1...N} проводников второго и пятого сегментов кабеля и {1...К} проводников третьего и шестого сегментов кабеля, расположенных вдоль линий 200 и 300. Датчик помехи 30 формируется из {K+1...N} проводников первого, третьего, четвертого и шестого сегментов кабеля, расположенных вдоль линий 100 и 300.
На фиг.4 начало 15 первого сигнального датчика 10 есть начало первого проводника 11, описывающего вместе с первым сегментом «8»-образную петлю по левой половине рубежа охраны, а его конец соединен со вторым проводником 12 первого сегмента, который своим концом, являющимся средней точкой 16 первого сигнального датчика, соединен с началом проводника 21 второго «8»-образного сегмента, который своим концом соединен с началом его второго проводника 22, конец которого есть конец первого (двухвиткового) сигнального датчика 10. Начало 25 второго сигнального датчика есть начало первого проводника 31 третьего «8»-образного сегмента, который соединен с началом его второго проводника 32, который своим концом, являющимся средней точкой 26 второго сигнального датчика, соединен с началом первого проводника 13 четвертого «8»-образного сегмента, который своим концом соединен с началом его второго проводника 14, конец которого есть конец 27 второго (двухвиткового) сигнального датчика 20. Начало 35 датчика помехи есть начало первого проводника 23 пятого «U»-образного сегмента, который соединен с началом его второго проводника 24, который своим концом, являющимся средней точкой 36 датчика помехи, соединен с началом первого проводника 33 шестого «U»-образного сегмента, который своим концом соединен с началом проводника 34, конец которого является концом 37 (двухвиткового) датчика помехи 30. Места переходов (перекрестий) проводников сигнальных датчиков с одной линии на другую находятся посередине соответствующих сегментов, т.е. отстоят на расстояние L/4 от середины и конца рубежа охраны.
Начало 15 и конец 17 первого сигнального датчика 10 (фиг.2) подключаются на вход первой схемы защиты 40, а его средняя точка 16 соединяется с шиной нулевого потенциала. Аналогичным образом начало 25 и конец 27 второго сигнального датчика 20 подключаются на вход второй схемы защиты 41, а его средняя точка 26 соединяется с шиной нулевого потенциала. Начало 35 и конец 37 датчика помехи 30 подключаются на вход третьей схемы защиты 42, а его средняя точка 36 соединяется с шиной нулевого потенциала.
Сигналы напряжения (вследствие электромагнитной индукции), обусловленные изменением магнитного потока в площади планарных индукционных датчиков 10, 20 и 30, с их соответствующих выходов поступают на идентичные схемы защиты 40, 41 и 42, предназначенные для защиты электронных узлов от перенапряжений, вызванных, например, грозовыми разрядами, а также фильтрации высокочастотных электромагнитных помех. Сигналы с выходов схем защиты 40, 41 и 42 поступают на входы соответствующих (идентичных по параметрам) дифференциальных усилителей 43, 44 и 45.
В известных магнитометрических устройствах для охранной сигнализации используется сигнальное заземление шины нулевого потенциала, а выводы сигнального датчика располагаются обычно в начале (конце) рубежа [7, 8]. При расположении выводов датчика посередине рубежа, как в описываемом устройстве, появляется возможность использовать среднюю точку - точку симметрии датчика для повышения его помехоустойчивости к воздействию электрической составляющей помехи, обусловленной, например, близлежащей высоковольтной ЛЭП, идущей вдоль рубежа охраны. Такая «емкостная» помеха наводит в обычном (несимметричном) сигнальном датчике синфазное помеховое напряжение (типично сотни мВ - единицы В), в общем случае пропорциональное входному сопротивлению Rвх (типично десятки кОм) схемы защиты, нагруженной на усилитель напряжения. Любой усилитель имеет конечную величину ослабления синфазной помехи (типично 80...90 дБ), которая проходит на его выход, сравнима по величине с уровнем полезных сигналов (доли-единицы мкВ) и может являться причиной ложных тревог известных устройств. В описываемом устройстве доступная средняя точка сигнального датчика заземляется через сопротивление заземлителя Rз (типично десятки Ом), тем самым уменьшая синфазную электрическую помеху, по сравнению с известными устройствами, приблизительно в Rвх/Rз≫1 раз. Заземление средней точки датчика, с другой стороны, практически не ослабляет полезный сигнал, обусловленный перемещением обнаруживаемого намагниченного объекта над магниточувствительной площадью сигнальных датчиков 10 и 20.
Для наилучшего симметрирования входов дифференциальных усилителей 43, 44 и 45 (фиг.2) соответствующие схемы защиты 40, 41 и 42 также должны быть симметричными. Такая пассивная трехкаскадная схема защиты, например, может состоять из газоразрядника (с тремя выводами, средний вывод - для подключения шины нулевого потенциала), включенного параллельно входу, к которому подключаются также по два одинаковых делителя напряжения в виде последовательного соединения токоограничивающего резистора и варистора. Варисторы другим концом подключены к шине нулевого потенциала. К точкам соединения токоограничивающего резистора и варистора подключаются интегрирующие RC-цепи (конденсаторы другими зажимами также подключены к шине нулевого потенциала), выходы которых уже подключаются к дифференциальному входу соответствующего усилителя.
Введение симметрирования сигнальных датчиков (и датчика помех) и зануление их средних точек позволяют, по сравнению с прототипом и аналогами, существенно снизить уровень синфазной электрической помехи, уменьшить частоту ложных тревог устройства, размещенного вблизи высоковольтных ЛЭП, в 3...5 раз.
С выходов усилителей 43, 44 и 45 сигналы поступают на идентичные полосовые фильтры - соответственно 46, 47 и 48, где происходит их усиление и ограничение полосы пропускания частот (типично 0,2...3 Гц). Фильтры обеспечивают также наклон амплитудно-частотной характеристики в полосе пропускания, равный -6 дБ/октаву, необходимый для исключения зависимости величины полезных сигналов от скорости движения объектов обнаружения. Фильтры реализуются на базе операционных усилителей по известным схемам [10]. Полоса регистрируемых частот сигналов выбирается для обеспечения максимума отношения сигнал/шум и определяется диапазоном возможных скоростей движения объектов-нарушителей (Vмин...Vмакс); шириной петли А, а также спектром электромагнитного шума [7].
Сигналы с выходов полосовых фильтров 46, 47 и 48 (фиг.2) одновременно поступают на соответствующие одинаковые детекторы огибающей 53, 54 и 55, где выделяются их огибающие. Детектор огибающей 53 (54, 55) представляет собой активный двухполупериодный выпрямитель, совмещенный с фильтром нижних частот [10], у которого верхняя граничная частота (типично 0,05 Гц) в несколько раз меньше нижней граничной частоты полосового фильтра 46 (47, 48). На выходах первого, второго и третьего детекторов огибающей (соответственно 53, 54, и 55) формируются медленно изменяющиеся однополярные сигналы, которые в отсутствие внешних помех и нарушителя отражают уровень собственного и внешнего магнитного шума (фона) с каждого датчика, причем в реальной обстановке внешний шум преобладает. Поскольку сигнальные датчики 10 и 20 построены по дифференциальной схеме, внешний магнитный шум (в том числе шум магнитного поля Земли), воспринимаемый ими, существенно (типично на порядок и более) меньше магнитного шума, воспринимаемого датчиком помехи 30. Следовательно, медленно изменяющиеся фоновые сигналы U53 и U54 с выходов соответственных детекторов огибающей 53 и 54 существенно меньше сигнала U55 с выхода детектора огибающей 55.
При наличии возмущения магнитного поля (нарушителя или действия помехи) фоновые сигналы U53 и U54, с одной стороны, и фоновый сигнал U55, с другой стороны, увеличиваются, но неодинаково. Если фоновые сигналы с двух сигнальных датчиков приблизительно соответствуют фоновому сигналу с датчика помехи, то источник с высокой вероятностью находится в «ближней» зоне ЧЭ, где дифференциальный характер сигнальных датчиков практически не проявляется. Эта ситуация вероятнее всего ассоциируется с движением намагниченного нарушителя. Если фоновый сигнал с датчика помехи существенно (типично на порядок) больше, то источник фона или однородный (например, флуктуации магнитного поля Земли), или находится в «дальней» зоне ЧЭ, что ассоциируется с действием электромагнитной помехи. При этом геометрические размеры «ближней» зоны ЧЭ, как было сказано выше, сравнимы с величиной А, расстояние до «дальней» зоны более чем на порядок превышает А.
Сигнал U55 с выхода детектора огибающей 55 поступает на инвертирующий усилитель 60 с коэффициентом усиления Ки<1, который может быть выполнен на базе операционного усилителя [10]. Сигналы U53 и U54 соответственно с выходов детекторов огибающей 53 и 54, а также сигнал Ки·U55 с выхода инвертирующего усилителя 60 поступают на вход аналогового сумматора 64, где они суммируются. Сигнал U64 на выходе сумматора 64 (который может быть выполнен по схеме суммирующего инвертирующего усилителя), поступающий на вход порогового элемента (ПЭ) 65, в обычном случае представляет собой, по сути, разность между суммарным магнитным фоном с выходов сигнальных датчиков и уменьшенным (в Ки раз) магнитным шумом с датчика помехи. Порог ПЭ 65 равен нулю, поэтому его выходной сигнал соответствует логической «1», если U53+U54≥Ки·U55, и его выходной сигнал соответствует логическому «0», если U53+U54<Ки·U55.
Таким образом, логический сигнал 104 на выходе ПЭ 65 является индикатором того, какой магнитный шум преобладает - с сигнальных датчиков (U53+U54) или уменьшенный шум с датчика помехи (Ки·U55). Тем самым идентифицируется ситуация на рубеже охраны, в какой зоне ЧЭ («ближней» или «дальней») находится предполагаемый источник регистрируемого магнитного поля. Вероятное появление нарушителя в «ближней» зоне приводит к сигналу 104 в виде логической «1» - разрешения на выдачу выходного сигнала устройства (должны исполниться и другие критерии обнаружения), поступающего на второй вход 104 узла разрешения 70. Магнитный внешний фон или действие электромагнитных помех из «дальней» зоны характеризуется сигналом 104 в виде логического «0» - запрета на выдачу выходного сигнала устройства.
Выбираемое (регулируемое) значение коэффициента Ки зависит от достижимого на месте применения коэффициента компенсации помех Кп сигнальных датчиков 10 и 20, чья величина (типично 30...50 дБ) определяется, в основном, тщательностью установки вдоль рубежа охраны кабельных сегментов ЧЭ. Они должны лежать в одной плоскости на одинаковом расстоянии друг от друга, тем самым обеспечивая равновеликость двух «U»-образных плеч, из которых образуется «8»-образный индукционный дифференциальный чувствительный контур сигнального датчика [2]. Выбор величины Ки (Кп) можно осуществлять на примере дипольного источника полезного сигнала. При «недипольном» характере объекта обнаружения, когда его линейные размеры сравнимы с расстоянием до плоскости датчиков или даже больше, как показывают результаты измерений, соотношения сигналов изменяются в слабой степени (не более ±2 дБ).
При перемещении объекта - нарушителя с дипольным магнитным моментом М [Ам2] на высоте h [м] со скоростью V [м/с] над плоскостью одновиткового двухлинейного или трехлинейного «петлевого» индукционного датчика средние величины полезных сигналов  [нВ] с выходов «О»-образного датчика помехи и «8»-образных сигнальных датчиков примерно равны между собой, в первом приближении не зависят от ширины магниточувствительного контура (А и 2А - соответственно для сигнального и помехового датчика), и их можно оценить по формуле [2]:
[нВ] с выходов «О»-образного датчика помехи и «8»-образных сигнальных датчиков примерно равны между собой, в первом приближении не зависят от ширины магниточувствительного контура (А и 2А - соответственно для сигнального и помехового датчика), и их можно оценить по формуле [2]:
 .
.
Поскольку в заявляемом устройстве применяется интегрирование сигнала в полосе пропускания, стабилизирующее величину полезного сигнала на уровне, соответствующем Vмин, то эта формула будет иметь вид:

Из (2) следует, что поскольку все аналогичные аналоговые узлы усиления и фильтрации в первом приближении идентичны, то U53 ˜ U54 ˜ U55, а отношение фоновых сигналов на входе сумматора при пересечении зоны обнаружения нарушителем будет:
[Ки·U55/(U53+U54)]наруш≅Ки/2.
С другой стороны, при действии «удаленного» источника электромагнитной помехи в дифференциальном сигнальном датчике помеховый отклик будет в 2Кп раз меньше по сравнению с недифференциальным датчиком помехи, имеющим в 2 раза большую площадь, т.е. U53 ˜ U54 ˜ U55/2Кп. Отсюда:
[Kи·U55/(U53+U54)]пом≅Kп·Kи.
Таким образом, для того, чтобы выходной сигнал ПЭ 65 соответствовал логике идентификации событий (логическая «1» - для нарушителя, логический «0» - для помехи), необходимо, чтобы одновременно выполнялись оба условия: Ки/2<1 и Кп·Ки>1, что приводит к искомому неравенству:

которое задает возможные рамки уставки (регулировки) коэффициента усиления инвертирующего усилителя 60. При подстановке в (3) минимального значения  из [2], получим, что 2>Ки>0,033.
из [2], получим, что 2>Ки>0,033.
Крайние границы этого интервала значений, ввиду приблизительного характера соотношений и величины  , могут варьироваться в пределах ±6 дБ, поэтому для устойчивой оценки можно взять среднее геометрическое этого интервала:
, могут варьироваться в пределах ±6 дБ, поэтому для устойчивой оценки можно взять среднее геометрическое этого интервала:  . Диапазон его регулировки можно также задать ±6 дБ относительно выбранного значения,
. Диапазон его регулировки можно также задать ±6 дБ относительно выбранного значения,  , т.е. Ки={0,12...0,5}. Изменяя величину Ки в большую сторону, можно делать ПЭ 65 более чувствительным к помехе, иными словами уменьшить размер «дальней» (помеховой) зоны. Такая регулировка возможна при установке магнитометрического устройства для охранной сигнализации в городе или условиях близкого расположения источников мощных электромагнитных помех. Изменяя величину Ки в меньшую сторону, можно делать ПЭ 65 более чувствительным к вероятному нарушителю, иными словами увеличить размер «ближней» зоны устройства. Такая регулировка возможна при установке магнитометрического устройства для охранной сигнализации вдали от города и источников промышленных помех, увеличивая обнаружительную способность к нарушителям с небольшим магнитным моментом.
, т.е. Ки={0,12...0,5}. Изменяя величину Ки в большую сторону, можно делать ПЭ 65 более чувствительным к помехе, иными словами уменьшить размер «дальней» (помеховой) зоны. Такая регулировка возможна при установке магнитометрического устройства для охранной сигнализации в городе или условиях близкого расположения источников мощных электромагнитных помех. Изменяя величину Ки в меньшую сторону, можно делать ПЭ 65 более чувствительным к вероятному нарушителю, иными словами увеличить размер «ближней» зоны устройства. Такая регулировка возможна при установке магнитометрического устройства для охранной сигнализации вдали от города и источников промышленных помех, увеличивая обнаружительную способность к нарушителям с небольшим магнитным моментом.
Введение датчика помехи и соответствующих блоков защиты-усиления-фильтрации 42, 45, 48, а также реализация информативного признака различения полезных сигналов (нарушитель в «ближней» зоне) от помех (из «дальней» зоны) с помощью блоков 53, 54, 55, 60, 64, 65 позволяют существенно увеличить помехоустойчивость устройства по сравнению с прототипом, аналогами ко всем видам электромагнитных помех. Наибольшая эффективность отстройки от помех (типично 1000:1), как и следовало ожидать, достигается по мощным, удаленным на расстояние несколько километров помехам, таким, например, как атмосферики при разрядах молний, импульсы в токовой цепи электрифицированной железной дороги. При приближении источника помехи к ЧЭ эффективность отстройки уменьшается, тем не менее, даже на расстояниях в 50...100 м, как показывают эксперименты, она составляет не менее 50:1.
Сигнал с выхода полосового фильтра 46 также одновременно поступает на пороговые элементы (ПЭ) 49 и 50 с равными по величине, но противоположными по знаку порогами П0, осуществляющие амплитудную дискриминацию усиленного и отфильтрованного сигнала с первого сигнального датчика 10. При превышении сигналом порога +П0 ПЭ 49 выдает сигнал логической «1», при снижении сигнала менее -П0 ПЭ 50 выдает сигнал логической «1». Аналогичным образом ПЭ 51 и ПЭ 52 осуществляют амплитудную дискриминацию усиленного и отфильтрованного сигнала со второго сигнального датчика 20 соответственно на уровнях +П0 и -П0. Пороговые элементы 49, 50, 51, 52 могут быть выполнены по схеме компаратора с обратной связью на базе операционного усилителя, по-другому могут быть программно реализованы в микроконтроллере, имеющем АЦП [10, 11].
Выходные сигналы с ПЭ 50 и ПЭ 51 объединяются элементом И 57 так, что его выходной сигнал в виде логической «1» появляется, когда одновременно фиксируются значимый (т.е. превышающий порог обнаружения) отрицательный выброс (полуволна) сигнала по первому сигнальному датчику 10 и положительный выброс (полуволна) по второму сигнальному датчику 20. Выходные сигналы с ПЭ 49 и ПЭ 52 объединяются элементом И 58 так, что его выходной сигнал в виде логической «1» появляется, когда одновременно фиксируются значимый положительный выброс (полуволна) сигнала по выходу датчика 10 и отрицательный выброс (полуволна) по выходу датчика 20. Выходы элементов И 57, 58 объединяются элементом ИЛИ 62 так, что на его выходе появляется сигнал 103 в виде логической «1», если на выходе сигнальных датчиков одновременно появляются выбросы (полуволны) сигнала различной полярности, превышающие порог обнаружения По. Наличие сигнала 103 в виде логической «1» на выходе элемента ИЛИ 62 в ответ на передвижение нарушителя является новым выявленным информационным признаком различения полезных сигналов и помех, реализованным в заявляемом устройстве.
Информационный признак совпадения «фракций» полезных сигналов разной полярности с выходов сигнальных датчиков основан на том, что сигнатуры полезных сигналов с двух сигнальных датчиков, лежащих рядом, взаимно коррелированны и строго детерминированы, «привязаны» к линиям 100, 200 и 300 расположения ЧЭ (фиг.1). Указанные 3 линии не только задают фактическое расстояние А (задержку A/V) между сигнальными датчиками, но и определяют сигнатуры сигналов с их выходов, чего не было в устройстве-прототипе (2 линии расположения датчиков).
Для дипольного источника полезного сигнала, не изменяющего своей ориентации в пространстве в процессе прямолинейного перемещения в зоне обнаружения устройства («параллельный» перенос), это показано в работе [7]. Для протяженного «недипольного» объекта обнаружения, который представим в виде множества разнесенных частных диполей, не изменяющих своей ориентации в процессе движения, это также строго выполняется. Как показывают измерения, отдельные ферромагнитные части реальных протяженных транспортных средств, которые изменяют свою ориентацию при движении в зоне обнаружения (крутящиеся колеса, карданный вал и пр.), не вносят заметного (не более 20%) вклада в суммарный сигнал, определяемый параллельным переносом множества частных диполей, распределенных по объему объекта-нарушителя.
С изменением скорости V движения пропорционально изменяется временной масштаб сигналов U1(t), U2(t) на выходе соответствующих полосовых фильтров 46 и 47, однако их сигнатуры U1(x), U2(x) остаются неизменными по отношению к координате х=V·t и определяются ориентацией частных диполей по объему объекта обнаружения. Поэтому и взаимное расположение (корреляция) сигнатур U1(x), U2(х) друг относительно друга не зависит от скорости объекта V, а поскольку в устройстве фактически применено интегрирование сигнала (в полосовых фильтрах 46 и 47), то и амплитуды этих сигналов также не зависят от величины скорости V.
Сигнатуры U1(x), U2(x) в незначительной степени зависят от величины А - при его увеличении сигнатуры или «выбросы» полезного сигнала становятся более выраженными, «группируются» около линий 100, 200 и 300. По результатам моделирования (диполь) и экспериментов (диполь, недиполь) выявлена закономерность корреляции сигнатур U1(x), U2(х), практически не зависящая от величины А. Она связана с тем, что в области средней линии 200 ЧЭ первый (по моменту возникновения) полезный сигнал с одного датчика всегда входит в стадию своего окончания, а второй сигнал (с другого датчика) в это время входит в начальную стадию «подъема». В этот момент времени (прохождения середины зоны обнаружения) полезные сигналы с обоих сигнальных датчиков близки к локальным экстремумам, причем с разными полярностями.
Информационный признак совпадения значимых разнополярных фрагментов полезных сигналов с сигнальных датчиков является отличительным по отношению к действию мощной кратковременной или продолжительной электромагнитной помехи, создающей отклики U1(t), U2(t) на выходе соответствующих полосовых фильтров 46 и 47, практически совпадающие по форме и по фазе. Возможные незначительные различия сигнатур помех по амплитуде (обусловленных пространственным градиентом помехи) и фазе (обусловленных различиями соответствующих аналоговых схем и блоков, как правило, не более 0,1π) не создают ситуации наложения «разнополярных» фрагментов сигналов с обоих датчиков.
Время τ*, в течение которого значимые полезные сигналы с разных датчиков одновременно превышают различные по знаку пороги обнаружения, обратно пропорционально скорости V движения объекта. Для высот h перемещения объекта - магнитного диполя в широком диапазоне {0,3...2}·А, охватывающем все практические случаи, как показывает моделирование полезных сигналов от диполя, величина τ* изменяется незначительно и составляет {0,7...0,85}·A/V [7]. Измерения полезных сигналов от протяженных (недипольных) объектов дают близкую к этой оценку τ* (больше на 20...30%). Следовательно, можно утверждать, что в любом практическом случае величина τ* будет составлять не менее

откуда, например, для А=2 м, Vмакс=20 м/с получим τ*≥70 мс. Соотношение (2) является усилением признака наложения разнополярных импульсов и реализуется в узле разрешения 70 (фиг.2).
В устройстве-прототипе взаимная корреляция сигналов U1(t), U2(t) друг относительно друга существенно зависит от расстояния А между датчиками (и, естественно, скорости движения объекта V), и выявить корреляцию, подобную соотношению (1), для всех возможных реальных случаев обнаружения не представляется возможным. Это является следствием того, что сигнатуры полезных сигналов U1(x), U2(x) не «привязаны» друг к другу посредством «средней» линии 200 (ее нет), как это существует в заявляемом устройстве.
Реализация в заявляемом устройстве признака совпадения «разнополярных» фрагментов сигналов с двух датчиков определенной длительности позволяет в 3...5 раз повысить его помехоустойчивость по отношению к близкорасположенным источникам электромагнитных помех.
Сигнал с выхода элемента ИЛИ 62, несущий информационный признак «разнополярных» полезных сигналов, поступает на первый вход 103 узла разрешения 70. На его второй вход 104 поступает сигнал с выхода ПЭ 65, несущий информационный признак преобладания полезных сигналов над долей сигнала помехи при наличии нарушителя в «ближней» зоне обнаружения устройства. Узел разрешения 70 обрабатывает поступающие сигналы фактически по логической схеме «И» так, что его выходной сигнал в виде логической «1» интегрирует в себе оба информационных признака различения полезных сигналов и помех и поступает на пятый вход 107 анализатора 90. Узел разрешения 70 может быть реализован на базе жесткой логики или микропроцессора (программным путем).
Выходные сигналы с ПЭ 49 и ПЭ 50 объединяются элементом ИЛИ 56 и поступают на дискриминатор длительности импульса 61, вырабатывающий логическую «1» в течение времени действия импульса, если его длительность tи≥τ12. Таким образом, исключаются очень короткие импульсные помеховые сигналы с первого сигнального датчика, которые могут быть вызваны источниками сильных импульсных помех, например близкорасположенными трансформаторами или линиями связи. Величина τ12 (типично 40 мс) выбирается меньше минимальной длительности значимого фрагмента полезного сигнала, которая соответствует максимальной скорости движения объекта Vмакс.
Для дипольного приближения, как следует из [2], основная частота спектра полезного сигнала, форма которого похожа на период синусоиды, составляет f0 ˜ V/4A, по которой можно оценить минимальную длительность tи полуволны полезного сигнала, например, на уровне -3 дБ от максимума:

Если взять А=2 м, Vмакс=20 м/с, то получим  =100 мс. С учетом этого может выбираться величина τ12<
=100 мс. С учетом этого может выбираться величина τ12< . Для недипольных источников соотношение (5) также позволяет приблизительно оценить минимальные длительности вызываемых импульсов.
. Для недипольных источников соотношение (5) также позволяет приблизительно оценить минимальные длительности вызываемых импульсов.
Дискриминатор длительности импульсов может быть реализован или на жесткой логике в виде счетчика тактовых импульсов, управляемых по входу сброса [10], или посредством программной реализации на базе микроконтроллера [11].
Аналогично вышесказанному, выходные сигналы с ПЭ 51 и ПЭ 53 объединяются элементом ИЛИ 59 и поступают на дискриминатор длительности импульса 63, вырабатывающий сигнал логической «1» в течение времени действия импульса, если он имеет длительность tи≥τ12. Таким образом, исключаются очень короткие импульсные помеховые сигналы со второго сигнального датчика, которые также могут быть вызваны источниками импульсных электромагнитных помех.
Выходной сигнал элемента ИЛИ 61 в виде последовательности импульсов поступает на первый вход 105 узла счета 80, на второй его вход 106 поступает выходной сигнал (в виде последовательности импульсов) с элемента ИЛИ 63. Узел счета 80 предназначен для обработки входных сигналов, обусловленных значимыми сигналами с первого и второго сигнальных датчиков, чтобы выделить информационные признаки полезных сигналов, отличные от помех. К таковым можно отнести:
1. Наличие не менее N1=2 импульсов в их последовательности по каждому входу 105 или 106, соответствующих разнополярным экстремумам полезных сигналов. При движении «большого» объекта через зону обнаружения устройства (например, грузового автомобиля) количество N1 может достигать 4...5; при движении «малого» объекта количество N1 составляет 2...3. Подсчет импульсов счетчиками может происходить в течение времени счета Тсч (типично 5...8 с), задаваемого системным таймером, которое характеризует максимальное время нахождения объекта в зоне обнаружения устройства, соответствующее минимальной скорости движения объекта Vмин. Оценка этого времени для дипольного источника составляет:

для протяженного объекта эта величина несколько больше. По окончании времени счета или при выдаче выходного сигнала устройством счетчики обнуляются. Информационный признак согласно (6) обусловлен процессом сигналообразования в ЧЭ и используется в устройстве-прототипе.
2. Последовательность импульсов (по каждому входу) характеризуется относительно небольшими паузами (временными промежутками) между импульсами, свидетельствующими о наличии полезного сигнала. Если пауза превышает определенный промежуток τп (типично 1,5 с), то можно судить об окончании полезного сигнала или о пересечении зоны обнаружения нарушителем. Если после этого возникает новый импульс, то он свидетельствует о начале нового сигнала, ассоциированного с новым объектом обнаружения. Этот информационный признак обусловлен процессом сигналообразования в датчике и используется в устройстве-прототипе.
3. Последовательное во времени пересечение нарушителем зон обнаружения двух сигнальных датчиков обусловливает соответствующие временные последовательности импульсов, сдвинутые во времени (в случае идентичности датчиков 10 и 20, блоков 40 и 41, 43 и 44, 46 и 47, а также соответствующих цифровых узлов и элементов) на величину прогнозируемой задержки согласно (1): Тзад=А/V. В зависимости от того, какие импульсы (или импульс) первыми появляются на входе 105 или 106, а какие с задержкой согласно (1), выносится решение о направлении движения объекта-нарушителя «1→2» или «2→1» (фиг.1). Этот информационный признак направления обусловлен процессом сигналообразования в фактически двухрубежном ЧЭ и используется в устройстве-прототипе.
4. Реальная задержка импульсов друг относительно друга, следующих по разным входам узла счета 80, может отличаться (типично ± 30%) от (1) вследствие неидентичности соответствующих датчиков, узлов и элементов, а также вследствие воздействия окружающего магнитного шума и вклада ферромагнитных частей объекта, изменяющих свою ориентацию в процессе движения (например, колеса, двигатель - для транспорта). Тем не менее, это есть важный количественный информационный признак различения полезных сигналов и помех, не учтенный в устройстве-прототипе.
Из (1) следуют условия: минимально возможной задержки  , максимально возможной задержки
, максимально возможной задержки  которые при типовых условиях (А=2 м, V=1...20 м/с) дают возможный интервал Тзад={0,1...2 с}, который может варьироваться в определенных пределах при изменении ширины А сигнальных датчиков 10 и 20.
которые при типовых условиях (А=2 м, V=1...20 м/с) дают возможный интервал Тзад={0,1...2 с}, который может варьироваться в определенных пределах при изменении ширины А сигнальных датчиков 10 и 20.
Мощная электромагнитная помеха, одновременно воздействующая на оба сигнальных датчика, приводит к практически одновременному появлению на входах 105 и 106 одного или нескольких импульсов. Возможная задержка t* между их появлением связана с неидентичностью датчиков 10 и 20, блоков 40 и 41, 43, с одной стороны, и 44, 46 и 47, с другой стороны, а также неидентичностью ПЭ 49-52 (фиг.2), а также различием в амплитуде помеховых откликов с сигнальных датчиков вследствие пространственного градиента помехи на базе А. Чем шире полоса регистрируемых частот {fн...fв}, тем погрешности за счет фильтрации (фазовые искажения) меньше. Чем меньше разбег частотно-задающих параметров схем защиты, усилителей и фильтров, чем точнее величины порогов и усилений, тем задержка меньше.
Как правило, спектр электромагнитной помехи существенно шире, чем диапазон регистрируемых частот устройства, поэтому помеха условно может быть представлена в виде либо «ступеньки» - единичной функции, либо в виде δ-функции [12]. При 1% точности элементов, задающих частотные, усилительные и пороговые параметры узлов устройства, задержка  между помеховьми откликами будет определяться разностью в набегах фаз в полосовых фильтрах, которые в первом приближении обратно пропорциональны верхней граничной частоте fв. Как показывает практика, крайне маловероятно, чтобы такие фазовые отличия превышали π/6 на верхней граничной частоте или задержку в 1/12 минимального периода колебаний. Тогда при fв=3 Гц получим задержку
между помеховьми откликами будет определяться разностью в набегах фаз в полосовых фильтрах, которые в первом приближении обратно пропорциональны верхней граничной частоте fв. Как показывает практика, крайне маловероятно, чтобы такие фазовые отличия превышали π/6 на верхней граничной частоте или задержку в 1/12 минимального периода колебаний. Тогда при fв=3 Гц получим задержку  ˜ 30 мс, что значительно меньше
˜ 30 мс, что значительно меньше  с.
с.
Таким образом, выбором элементов устройства можно ограничить возможную неконтролируемую задержку  при действии большинства помех до величины, которая будет меньше прогнозируемой минимальной задержки между «полезными» импульсами с сигнальных датчиков. Тем самым можно определить решающее правило для различения сигналов и помех: задержка τзад между сигналами с сигнальных датчиков, обусловленными нарушителем, должна быть:
при действии большинства помех до величины, которая будет меньше прогнозируемой минимальной задержки между «полезными» импульсами с сигнальных датчиков. Тем самым можно определить решающее правило для различения сигналов и помех: задержка τзад между сигналами с сигнальных датчиков, обусловленными нарушителем, должна быть:

Реализация этого правила может заключаться в запрете запуска системного таймера «короткими» сигналами, длительность которых меньше τзад (типично τзад=50 мс). Такое введение, как показывают натурные испытания, позволяет повысить помехоустойчивость магнитометрического устройства для охранной сигнализации не менее чем в 3 раза.
Узел счета 80 (фиг.2) реализует вышеописанные информационные признаки 1-4. В ответ на движение нарушителя через рубеж охраны, либо на его первом, либо на его втором выходе появляются сигналы в виде логической «1» в зависимости от того, в каком направлении движется объект - соответственно «1→2» либо «2→1». На третьем и четвертом выходах узла счета 80 появляются цифровые сигналы, отражающие количество разрешенных и посчитанных импульсов N1≥2, N2≥2 соответственно по первому 105 и второму 106 входам. Реализация узла счета 80 может быть осуществлена на основе жесткой логики, посредством микроконтроллера (программным путем).
Выходные логические сигналы с первого, второго, третьего и четвертого выходов узла счета 80 поступают соответственно на входы 18, 19, 28, 29 анализатора 90. На его пятый вход 107 поступает логический сигнал с узла разрешения 70. Анализатор 90 предназначен для проверки всех выявленных информационных различительных признаков полезных сигналов и помех и выработки выходного сигнала либо 38, либо 39 соответственно при обнаружении движения нарушителя в направлении «1→2» либо «2→1». Анализатор 90 реализуется на базе микропроцессора или жесткой логики.
Выходные сигналы 38, 39 анализатора 90 поступают на входы соответственно одновибраторов 66, 67, которые вырабатывают соответственно первый 102 и второй 201 выходные сигналы устройства заданной длительности T12 (типично 1...5 с). Сигналы с выходов одновибраторов 66 и 67 поступают на входы элемента ИЛИ 68, инициирующего работу одновибратора 69, выходной сигнал которого длительностью Т3 (типично 2...5 с) поступает на вход сброса 108 узла счета 80 и предназначен для сброса информации, записанной во время действия полезных сигналов. В течение времени действия этого сигнала информация по входам 105 и 106 в узел счета 80 не записывается, тем самым предотвращается многократная выдача сигналов тревоги при обнаружении «большого» объекта (например, автомобиль с прицепом).
На фиг.3 представлена схема многовиткового варианта магнитометрического индукционного чувствительного элемента 7 устройства, в котором количество N внутренних изолированных проводников в шести сегментах кабеля, формирующих К-витковые первый и второй сигнальные датчики и К-витковый датчик помехи, равно 2К, где К=1, 2, 3... (типично К=5, 10, 20, 30 у кабелей связи). На фиг.3 показана схема коммутации для кабельных сегментов, содержащих N=6 внутренних проводников, необходимых для организации 3-витковых датчиков.
Увеличение числа витков в датчиках по сравнению с одновитковым вариантом К=1 (фиг.1), несмотря на пропорциональное возрастание числа коммутаций в середине и на концах рубежа охраны, приводит к увеличению чувствительности устройства, поскольку полезный сигнал с выхода индукционного магнитометрического датчика возрастает пропорционально К [2]. В то же время собственный (тепловой) шум сигнальных датчиков, ограничивающий чувствительность устройства, пропорционален величине (R)0,5, где R - активное сопротивление датчика, а значит, пропорционален (К)0,5. Собственные шумы усилителей 43, 44, 45 практически не зависят от сопротивления источников сигналов (куда опосредованным образом входят соответствующие сопротивления датчиков), поэтому при увеличении уровня полезных сигналов требования к усилителям (по шумам) снижаются, что приводит к уменьшению сложности и стоимости устройства. Поэтому увеличение числа витков К датчиков (за счет применения 2К-жильного кабеля и увеличения количества коммутаций) приводит к дополнительному положительному техническому результату устройства для охранной сигнализации.
На фиг.4 представлена схема другого варианта магнитометрического индукционного чувствительного элемента 7 устройства, который формируется из шести сегментов кабеля, содержащего N внутренних изолированных проводников, образуя N-витковые первый, второй сигнальные датчики и датчик помехи. Число N может быть любым, с его увеличением чувствительность устройства также возрастает, аналогично варианту, описанному выше (фиг.3). На фиг.4 показана конфигурация двухвитковых датчиков, образованных четырьмя «8»-образными и двумя «U»-образными сегментами, лежащими попарно-симметрично относительно центра рубежа охраны.
Первый «8»-образный сегмент расположен вдоль прямых 100 и 200 с перекрестием в середине сегмента (на расстоянии L/4 влево от центра рубежа охраны). Начало внутреннего проводника 11 есть начало 15 первого сигнального датчика, конец проводника 11 соединяется (в середине рубежа) с началом другого проводника 12, конец которого есть средняя точка 16 первого сигнального датчика. К концу проводника 12 (в центре рубежа) подключается первый проводник 21 второго «8»-образного сегмента, расположенного вдоль первой и второй прямых, с перекрестием в середине сегмента (на расстоянии L/4 вправо от центра рубежа охраны). Проводники 21 и 22 соединяется между собой в середине рубежа, конец проводника 22 есть конец 17 двухвиткового первого сигнального датчика 10. Аналогичным образом, внутренние проводники 31, 32 третьего «8»-образного сегмента, лежащего вдоль прямых 200 и 300, с перекрестием в середине сегмента (на расстоянии L/4 влево от центра рубежа охраны) соединяются с внутренними проводниками 13, 14 четвертого «8»-образного сегмента, лежащего также вдоль прямых 200 и 300 с перекрестием в середине сегмента (на расстоянии L/4 вправо от центра рубежа охраны), образуя второй двухвитковый сигнальный датчик 20, у которого начало, средняя точка и конец есть соответственно 25, 26 и 27.
Внутренние проводники 23, 24 пятого «U»-образного сегмента, расположенного вдоль прямых 100 и 300 (фиг.4), соединяются последовательно (в центре рубежа) так, что начало проводника 23 и конец проводника 24 есть соответственно начало 35 и средняя точка 36 датчика помехи 30. Внутренние проводники 33, 34 шестого «U»-образного сегмента, расположенного вдоль прямых 100 и 300 (фиг.4), соединяются последовательно (в центре рубежа) так, что начало проводника 33 и конец проводника 34 есть соответственно средняя точка 36 и конец датчика помехи 30.
Изменение конфигурации схемы магнитометрического чувствительного элемента фиг.4, по сравнению с фиг.1, имеет целью увеличение внутренней помехоустойчивости сигнальных датчиков 10, 20 и увеличение в 2 раза количества витков в них. По отношению к электромагнитной помехе, действующей на устройство вдоль направления 100 (200, 300), в данном случае в 2 раза уменьшается величина базы дифференциального магниточувствительного планарного контура, образованного внутренними проводниками: в случае фиг.1 эта величина составляет L/2, в случае фиг.4 - L/4. Следовательно, при одинаковом характере пространственного градиента помехи во втором случае (фиг.4) она будет создавать меньший отклик на выходе сигнальных датчиков 10 и 20. По отношению к электромагнитной помехе, действующей на устройство перпендикулярно направлению 100 (200, 300), внутренняя помехоустойчивость сигнальных датчиков не изменяется и определяется величиной А. Преимуществом конфигурации согласно фиг.4 является отсутствие коммутаций (а значит, и коммутационных муфт) на концах рубежа охраны. Поэтому изменение схемы магнитометрического чувствительного элемента согласно фиг.4 по сравнению с фиг.1 (за счет применения нелинейных кабельных сегментов) приводит к дополнительному положительному техническому результату устройства для охранной сигнализации.
На фиг.5 представлена структурная схема варианта узла разрешения 70. Сигнал в виде логической «1» с выхода элемента ИЛИ 62 (фиг.2), свидетельствующий о появлении информационного признака «разнополярности», поступает на первый вход 103 узла 70 и своим передним фронтом инициирует работу дискриминатора длительности импульса 71, «отбрасывающего» недостаточно длительные сигналы, которые в редких случаях могут вызываться помехами. В случае, если длительность импульса на входе 103 составляет не менее τ3, то на выходе дискриминатора 71 появляется сигнал логической «1», заканчивающийся с окончанием сигнала на входе 103 и поступающий на первый вход элемента И 73. Если длительность входного сигнала менее τ3, то на выходе дискриминатора 71 сохраняется логический «0».
Величина τ3 (типично 50 мс) выбирается в соответствии с (4) за вычетом времени τ12 (действие дискриминаторов длительности импульса 61 или 63, фиг.2):

Дискриминатор длительности импульса 71 согласно (8) реализует информационный признак различения полезных сигналов и помех, описанный выше.
Сигнал логической «1» на втором входе 104 узла разрешения 70, поступающий с выхода ПЭ 65, свидетельствует о преобладании сигналов с сигнальных датчиков над частью сигнала с датчика помехи, т.е. о вероятном присутствии (движении) нарушителя в «ближней» зоне устройства. Если в течение действия логической «1» с выхода дискриминатора 71 на второй вход элемента И 72 поступает логическая «1», то на его выходе формируется сигнал логической «1», своим передним фронтом запускающий одновибратор 73. На выходе одновибратора 73 формируется однократный импульс логической «1» длительности Т4, блокирующий свой перезапуск через вход сброса дискриминатора 71.
Время Т4 (типично 3...4 с) определяет интервал «разрешения», в течение которого анализатор 90 (фиг.2) должен выявить и определить другие информационные признаки полезных сигналов, отличные от помех, поступающие на него в виде логических сигналов с узла счета 80. Узел разрешения 70 в ответ на движение нарушителя в зоне обнаружения выдает сигнал «разрешение» длительностью Т4, в случае действия разнообразных электромагнитных помех сигнал «разрешения» не выдается. Узел счета 70 может быть реализован на жесткой логике или на базе микропроцессора [10, 11].
На фиг.6 представлена структурная схема варианта узла счета 80, который включает последовательно включенные элемент «исключающее ИЛИ» 79, дискриминатор длительности импульса 81 и одновибратор 84, а также дискриминаторы межимпульсной паузы 74 и 75, одновибраторы 76 и 77, элемент ИЛИ 78, счетчики импульсов 82 и 83, триггеры 86 и 87. Дискриминатор межимпульсной паузы 74 (75) предназначен для формирования на своем выходе единственного импульса в виде логического «0» в ответ на последовательность импульсов на входе, если пауза между импульсами превышает τп. Дискриминатор 74 (75) осуществляет «продлевание» на время τп входных импульсов и их логическое «суммирование», чтобы сформировать единственный выходной импульс в ответ на однократное пересечение нарушителем зоны обнаружения устройства. Реализация такого дискриминатора возможна на базе двоично-десятичного счетчика [13] или программным путем в микропроцессоре. Если в последовательности входных импульсов время между ними превышает τп, то дискриминатор 74 (75) переходит в состояние логической «1», соответствующее отсутствию импульсов на входе. Время τп (типично 1,5 с) определяется минимальной скоростью движения объекта обнаружения, величиной базы А и нижней граничной частотой fн полосы пропускания фильтров 46 и 47 (фиг.2).
Сигналы в виде логических «0» с выходов дискриминаторов 74 и 75 поступают соответственно на первый и второй входы элемента ИЛИ 78, на его третий вход 108 поступает сигнал сброса с выхода одновибратора 69 (фиг.2). В обычном режиме на входе 108 формируется логический «0», и только при выдаче выходного сигнала устройства состояние входа 108 изменяется на логическую «1» на время Т3, обнуляя информацию, накопленную в узле счета 80 при обработке сигналов.
Таким образом, при появлении нарушителя в зоне обнаружения устройства на выходе дискриминатора 74 и дискриминатора 75 последовательно во времени появляются импульсы в виде логического «0», при их совпадении на выходе элемента ИЛИ 78 появляется логический «0», разрешающий работу одновибратора 84. Одновибратор 84 выполняет роль системного таймера устройства, определяя максимальное время анализа сигналов (Т7=5 с для типовых условий), как это происходит в устройстве-прототипе. По окончании любого сигнала с выходов дискриминаторов 74 и 75, при выдаче выходного сигнала устройства, логическая «1» с выхода элемента ИЛИ 78 обнуляет одновибратор 84, завершая анализ сигналов.
Сформированные последовательности импульсов, вследствие появления значимых сигналов с первого и второго сигнальных датчиков, на входе 105 и входе 106 узла счета 80 поступают соответственно на одновибраторы 76 и 77, которые нормализуют длительности входных импульсов на уровне Т56, т.е. выдают импульсы стандартной длительности в виде логической «1». Если интервал между импульсами во входной последовательности меньше Т56 (типично 60 мс), то на выходе одновибратора 76 (77) формируется только один импульс. Таким образом, одновибраторы 76, 77: 1) формируют импульсы стандартной длительности Т56, что необходимо для их последующего правильного счета; 2) отбрасывают часто следующие импульсы, не соответствующие полезным сигналам. Время интервала Т56 соответствует максимальной скорости движения объекта обнаружения, в то время как некоторые помехи могут вызывать пачки импульсов с меньшим временным разделением.
Импульсы стандартной длительности с выходов одновибраторов 76 и 77 поступают на схему «исключающее ИЛИ» 79, на выходе которой выходной сигнал в виде логической «1» появляется в том случае, если входные импульсы не совпадают. Каждый такой импульс с выхода схемы 79 своим передним фронтом инициирует работу дискриминатора длительности импульса 81, который пропускает на свой выход только те импульсы, которые имеют длительность не менее τ4. Величина τ4 (типично 40 мс) должна быть не более Т56 и соответствовать максимальной скорости Vмакс движения объекта.
Схема «исключающее ИЛИ» 79 и дискриминатор длительности импульса 81 реализуют информационный признак различения полезных сигналов и помех, описанный выше согласно (7): полезные сигналы с выходов соответствующих сигнальных датчиков следуют с задержкой не менее чем:  (0,1 с для типовых условий).
(0,1 с для типовых условий).
Сигнал логической «1» с выхода дискриминатора 81 своим передним фронтом инициирует появление выходного сигнала одновибратора 84 в виде логического «0» длительностью Т7, которая, как сказано выше, определяет максимальное время анализа сигналов с выходов сигнальных датчиков 10 и 20, а одновибратор 84 выполняет роль системного таймера устройства. Сигнал логического «0» с выхода одновибратора 84 разрешает работу счетчиков импульсов 82 и 83, передний (отрицательный) его фронт, поступая на тактовые входы триггеров 86 и 87, обеспечивает запись информации по входам, подключенным соответственно к выходам одновибраторов 76 и 77. В этот момент времени на их выходах присутствует единственная логическая «1»: если она имеется на выходе одновибратора 76 (первым поступил сигнал с сигнального датчика 10), то она записывается в триггер 86, состояние выхода которого изменяется с логического «0» на «1»; если она имеется на выходе одновибратора 77 (первым выдал сигнал второй сигнальный датчик 20), то она записывается в триггер 87, состояние выхода которого изменяется с логического «0» на «1». В другие моменты времени запись в триггеры не осуществляется, вплоть до сброса записанной «1» по заднему фронту сигнала с одновибратора 84.
По окончании импульса логического «0» с выхода одновибратора 84 он своим задним (положительным) фронтом переводит одновибратор 85 из состояния логического «0» в состояние логической «1» на малое время T8 (типично 5...10 мс), тем самым сбрасывая триггеры 86 и 87 по входам сброса. Таким образом, на выходе триггера 86, являющемся первым выходом узла счета 80, в течение времени Т7 формируется логическая «1», если движение объекта осуществлялось в направлении «1→2», т.е. от первого сигнального датчика ко второму. На выходе триггера 87, являющемся вторым выходом узла счета 80, формируется сигнал логической «1», если движение объекта обнаружения осуществлялось в направлении «2→1», т.е. от второго сигнального датчика к первому (фиг.1).
Любой импульс с выхода одновибратора 76 или 77 своим задним (отрицательным) фронтом осуществляет запись в соответствующий счетчик импульсов 82 или 83. На выходах счетчиков 82 и 83, являющихся соответственно третьим и четвертым выходом узла счета, формируются цифровые сигналы, соответствующие количеству поступивших на них импульсов, но не менее двух. По окончании действия импульса с выхода одновибратора 84 счетчики импульсов обнуляются через соответствующие входы сброса (типа R).
Таким образом, в узле счета 80 выделяются и запоминаются вышеописанные различительные признаки полезных сигналов и помех. Узел счета может быть выполнен на основе жесткой логики (двоично-десятичные счетчики, D-триггеры) или на базе микропроцессора [10-12].
На фиг.7 представлена структурная схема варианта анализатора 90, включающего элементы И 91, И 92, И 93, который может быть реализован на жесткой логике или на базе микропроцессора. При регистрации значимых сигналов с датчиков на первом 18 либо втором 19 входе анализатора формируется единственная логическая «1», являющаяся указателем направления предполагаемого движения нарушителя. Тем самым либо элемент И 92 (направление «1→2»), либо элемент И 93 (направление «2→1») по своим первым входам «открывается». Этот сигнал формируется, как правило, первым по времени, соответствуя моменту приближения нарушителя к ближайшему сигнальному датчику, и длится не более времени счета Т7 (типично 6 с), определяемого системным таймером - одновибратором 84 узла счета 80.
На пятый вход 107 анализатора 90 с узла разрешения 70 в случае выполнения всех информационных признаков полезного сигнала (нарушителя) поступает сигнал логической «1». Этот сигнал возникает, как правило, в момент прохождения объектом-нарушителем приблизительно середины зоны обнаружения устройства (линия 200, фиг.1) и длится не более времени Т4 (типично 3 с).
На третий 28 и четвертый 29 входы анализатора 90, являющиеся входами элемента И 91, в случае выполнения «счетных» условий обнаружения нарушителя (не менее 2-х значимых импульсов с каждого сигнального датчика) поступают сигналы логической «1». В результате чего на выходе элемента И 91 образовывается логическая «1», открывающая элементы И 92, И 93 по своим вторым входам. Этот сигнал длительностью не более Т7 формируется, как правило, последним, в момент пересечения объектом последней линии рубежа, на краю зоны обнаружения устройства.
При выполнении всех условий обнаружения на первом или втором выходах анализатора формируется сигнал логической «1», указывающий об обнаружении объекта, двигающегося в направлении «1→2» (элемент И 92) либо в направлении «2→1» (элемент И 93). Этот сигнал инициирует работу соответствующего одновибратора (66 либо 67), которые формируют выходной сигнал устройства 102 либо 201 (фиг.2).
В случае воздействия помех одно, несколько или все условия обнаружения (различительные признаки), проверяемые в узле разрешения 70, узле счета 80 и анализаторе 90, не выполняются, следовательно, выходной сигнал (тревоги) устройства не формируется.
Введение в известное устройство узла разрешения 70, узла счета 80, анализатора 90 позволяет реализовать все новые выявленные информационные признаки различения полезных сигналов и помех. При этом, как показывают натурные испытания, помехоустойчивость магнитометрического устройства для охранной сигнализации существенно повышается: в условиях действия промышленных электромагнитных помех - не менее чем в 15...20 раз, в условиях близкой грозы - не менее чем в 7...10 раз.
Устройство работает следующим образом. На фиг.8 показаны типичные временные диаграммы (сигнатуры) полезных сигналов в устройстве (фиг.2) при обнаружении объекта-нарушителя, двигающегося в направлении «1→2». Первоначально, до приближения объекта, суммарный магнитный фон в месте размещения устройства определяется флуктуациями магнитного поля Земли и суперпозицией электромагнитных помех от различных промышленных установок; как правило, последний фактор является преобладающим. Поэтому суммарный шум с выходов дифференциальных сигнальных датчиков 10 и 20, проявляющийся на выходах соответствующих полосовых фильтров 46 и 47, примерно в Кп раз меньше, чем с недифференциального датчика помехи (на выходе фильтра 48). На выходе аналогового сумматора 64 при этом формируется отрицательное напряжение, а на выходе порогового элемента 65 - логический «0», указывающий на отсутствие намагниченного объекта вблизи зоны обнаружения устройства.
При приближении объекта-нарушителя к линии 100 (фиг.1, движение в направлении «1→2») сначала на выходе фильтра 46, а затем и 47 появляются полезные сигналы, которые «перевешивают» уровень шума с датчика помехи (на выходе фильтра 48), переводят выход ПЭ 65 (вход 104 узла разрешения 70) в состояние логической «1», поддерживающееся, как правило, в течение всего времени присутствия объекта в зоне обнаружения. Возникающие при этом полезные сигналы дискриминируются по амплитуде (ПЭ 49-52) и продолжительности (≥τ12, типично 20 мс) с помощью дискриминаторов длительности импульса 61, 63, которые устраняют «короткие» сигналы, свойственные некоторым помехам. Посредством элемента ИЛИ 62 выделяется импульс «разнополярности», поступающий на вход 103 узла разрешения 70. В узле разрешения 70 этот импульс дискриминируется по длительности (≥τ3, типично 50 мс), чтобы исключить редкие случаи, свойственные флуктуационным помехам. Поскольку на входе 104 присутствует логическая «1», этот импульс инициирует выдачу узлом 70 импульса «разрешения» длительностью Т4 (типично 3 с), который поступает на вход 107 анализатора 90.
Импульсы с выходов дискриминаторов 61 и 63 поступают на входы 105 и 106 узла счета 80, где они нормализуются по длительности (τ56, типично 80 мс) и передними фронтами сбрасывают в логический «0» выходы дискриминаторов межимпульсной паузы 74 и 75 (фиг.6), состояние которых не изменяется, если временной интервал между импульсами по каждому входу не превышает τп (типично 1,5 с). Совпадение логических «0» с выходов каждого дискриминатора 74 и 75 дает сигнал, разрешающий работу системного таймера (выход 84) на время не более Т7 (типично 5 с). Инициирование работы системного таймера осуществляется, если нормализованные по длительности импульсы (по обоим входам узла 80) сдвинуты во времени на величину более τ4 (типично 50 мс). При инициализации таймера происходит запись логической «1» в один из двух триггеров (в данном случае 86), указывающий на то, какой сигнал с выходов сигнальных датчиков поступил первым, т.е. направление движения объекта. В течение времени работы системного таймера нормализованные по длительности импульсы (по окончании) записываются в счетчики 82 и 83, которые при записи 2-х (и более) импульсов выдают на своих входах сигнал логической «1».
В течение преодоления нарушителем зоны обнаружения на вход 18 анализатора 90 поступает логическая «1», сигнализирующая о направлении движения нарушителя «1→2», на его вход 107 поступает логическая «1», свидетельствующая о выполнении информационных признаков «разнополярности» и предполагаемого наличия объекта в зоне обнаружения. Как только на входах 28 и 29 анализатора появляются логические «1» (в момент времени t0), свидетельствующие о выполнении информационного признака счета, то анализатор 90 выдает выходной сигнал 38, который инициирует работу одновибратора 66, на выходе которого появляется выходной сигнал устройства 102 длительностью Т12 (типично 1...3 с), сигнализирующий об обнаружении нарушителя, двигающегося в направлении «1→2». Этот сигнал через элемент ИЛИ 68 переводит выход одновибратора 69 в состояние логической «1» на время Т3 (типично 3 с), поступающей на вход сброса 108 узла счета и обнуляющей триггеры и счетчики узла счета, запрещая на это время работу узла счета. Тем самым предотвращается многократная выдача выходных сигналов устройства при обнаружении «длинных» объектов (например, автомобиля с прицепом).
На фиг.9 показаны типичные временные диаграммы (сигнатуры) полезных сигналов в устройстве (фиг.2) при обнаружении объекта-нарушителя, двигающегося в направлении «2→1». При этом логика работы узла разрешения 70 не изменяется, и в момент прихода «разнополярных» импульсов, сдвинутых во времени более чем на τ3, узел выдает на анализатор 90 сигнал разрешения в виде логической «1» длительностью Т4. Запись логической «1» осуществляется в триггер направления 87, поскольку первым появляется значимый сигнал со второго сигнального датчика 20. В момент времени t0, когда по обоим входам 105 и 106 насчитывается минимум два импульса, выполняются все условия обнаружения, и анализатор 90 выдает сигнал 39, инициирующий выходной сигнал устройства 201, сигнализирующий об обнаружении нарушителя, двигающегося в направлении «2→1».
На фиг.10 показаны типичные сигнатуры сигналов в устройстве при воздействии импульсных электромагнитных помех, обусловленных, например, скачками тока в удаленной ЛЭП. В этом случае действие помехи приводит к еще большему усилению помеховой (отрицательной) составляющей на выходе аналогового сумматора 64, соответственно ПЭ 65 не выдает сигнал «1» на узел разрешения 70, в то время как «разнополярные» импульсы по выходу элемента ИЛИ 62 не возникают, что двойным образом блокирует работу узла 70 и выдачу выходного сигнала устройства. В то же время импульсы, соответствующие значимым помеховым откликам с сигнальных датчиков 10 и 20, дискриминируются по длительности, и часть из них «отсеивается». Импульсы на входах 105 и 106 узла счета 80 сдвинуты во времени друг относительно друга на «малый» интервал (менее τ4), поскольку обусловлены практически одновременным и почти одинаковым воздействием помехи на оба сигнальных датчика. Поэтому алгоритм обработки узла счета 80 их эффективно отбрасывает, также блокируя работу анализатора по первым четырем входам 18, 19, 28, 29. Таким образом, ни одно из условий обнаружения не выполняется. В устройстве-прототипе помехи такого типа с высокой вероятностью будут вызывать ложные тревоги.
На фиг.11 показаны типичные сигнатуры сигналов в устройстве при воздействии флуктуационной электромагнитной помехи, обусловленной, например, токами растекания от электрифицированной железной дороги, на которую (во второй части фиг.11) накладывается помеха от импульсов тока в близкорасположенной токоведущей цепи. Видно, что многие помеховые отклики устраняются по длительности (менее τ12), большинство - по совпадению (во временном интервале τ4). Признак «разнополярности» у таких помех, как правило, отсутствует, а отрицательный «вес» таких откликов с недифференциального датчика помехи (во входу аналогового сумматора 64), как правило, доминирует над «весом» помеховых откликов с сигнальных датчиков. Все это приводит к эффективному устранению влияния такого рода помех сразу по нескольким информационным критериям обнаружения. В устройстве-прототипе и аналогах помехи такого типа с высокой вероятностью будут вызывать ложные тревоги.
На фиг.12 показаны сигнатуры сигналов в устройстве при движении нарушителя в направлении «1→2» и одновременном воздействии мощных импульсных электромагнитных помех. В этом случае возможны некоторые отклонения от идеального сценария (фиг.8, 9), однако все информационные признаки различения полезных сигналов и помех четко идентифицируются, и анализатор инициирует выдачу выходного сигнала 102 в момент времени t0.
Рассмотренные ситуации при обнаружении нарушителей (фиг.8, 9), действии помех (фиг.10, 11) и одновременном действии нарушителя и помех (фиг.12) показывают, что заявляемое устройство обладает высокой помехоустойчивостью и одновременно - высокой обнаружительной способностью. Организация в едином магнитометрическом чувствительном элементе двух лежащих рядом дифференциальных индукционных сигнальных датчиков и дополнительного недифференциального датчика помехи, введение в устройство описанных выше новых электронных блоков и связей позволяют, в условиях действия мощных промышленных электромагнитных помех импульсного и флуктуационного характера, а также помех от «близких» гроз, существенно повысить помехоустойчивость устройства и, как следствие, повысить среднюю наработку (период) на ложную тревогу устройства, по сравнению с аналогами и прототипом, не менее чем в 20...30 раз. Следствием этого является расширение области применения устройства, достигаемое увеличением его чувствительности.
Заявляемое устройство вследствие пассивного способа обнаружения и размещения в грунте или дорожном полотне не оказывает отрицательного воздействия на состояние окружающей среды.
Источники информации
1. Патент США №3754223, НКИ 340/258, опубл. 1973 г.
2. Звежинский С.С., Ларин А.И. Периметровые маскируемые магнитометрические средства обнаружения // Специальная техника. - М. - 2001 г. - №4. - С.8-14.
3. Патент США №3983531, НКИ 340/31 К, опубл. 1976 г.
4. Патент США №3745450, НКИ 324/41, опубл. 1973 г., - аналог.
5. Кравченко В.И., Болотов Е.А., Летунова Н.И. Радиоэлектронные средства и мощные электромагнитные помехи. М., «Радио и Связь», 1987 г.
6. Патент США №4052595, НКИ 235/92 ТС, МПК G 08 G 1/065, опубл. 1977 г., - прототип.
7. Звежинский С.С. Моделирование периметровых магнитометрических средств обнаружения // Проблемы объектовой охраны: Сборник научных трудов. - Вып.3. - Пенза: Инф.-издат. центр ПензГосУнив., 2002. - С.69 - 78.
8. Патент США №3967262, НКИ 340/258, опубл. 1976 г.
9. Патент США №3754223, НКИ 340/258, опубл. 1973 г.
10. П.Хоровиц, У.Хилл. Искусство схемотехники. T.1 / М.: «Мир», 1984. - 598 с.
11. П.Хоровиц, У.Хилл. Искусство схемотехники. Т.2 / М.: «Мир», 1984. - 590 с.
12. Шило В.Л. Популярные цифровые микросхемы: Справочник. - Челябинск: Металлургия. 1988. - 352 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОМАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2001 |
|
RU2210116C2 |
| ВИБРОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2013 |
|
RU2541129C2 |
| СПОСОБ ВИБРОМЕТРИЧЕСКОГО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263968C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 2004 |
|
RU2262744C1 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 1988 |
|
RU2106692C1 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2346335C2 |
| СЕЙСМИЧЕСКАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2013 |
|
RU2543930C2 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2006 |
|
RU2306611C1 |
| УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2001 |
|
RU2200978C2 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 1982 |
|
RU2106016C1 |
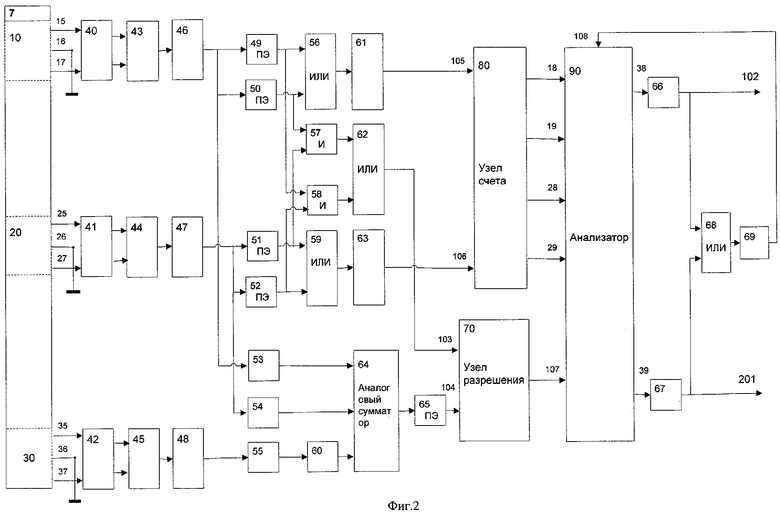


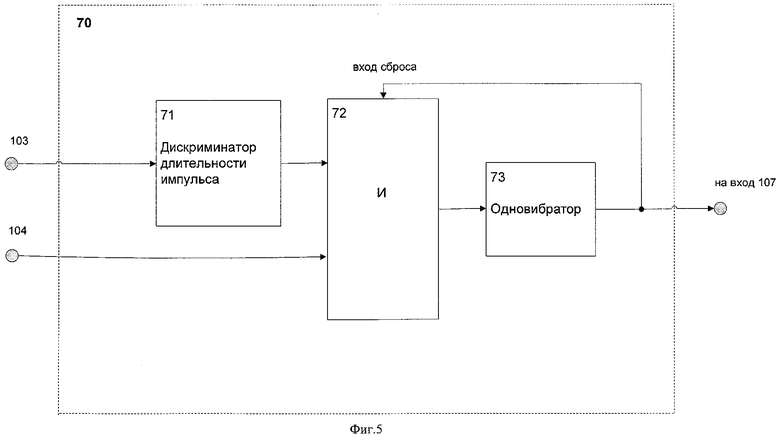
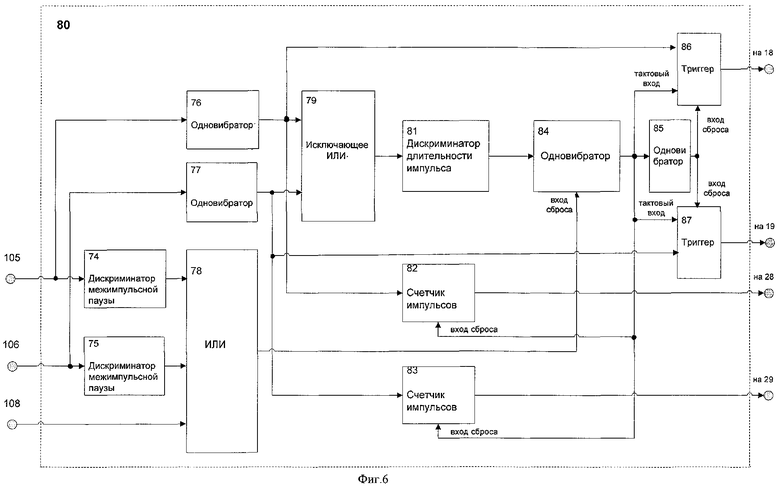
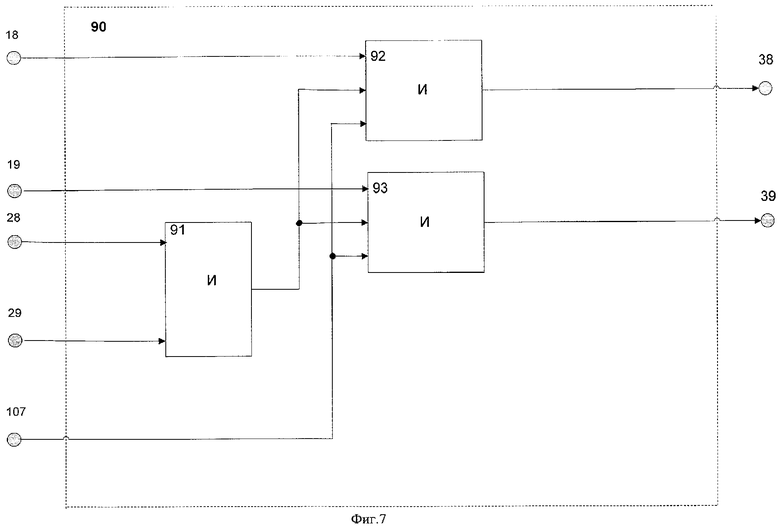

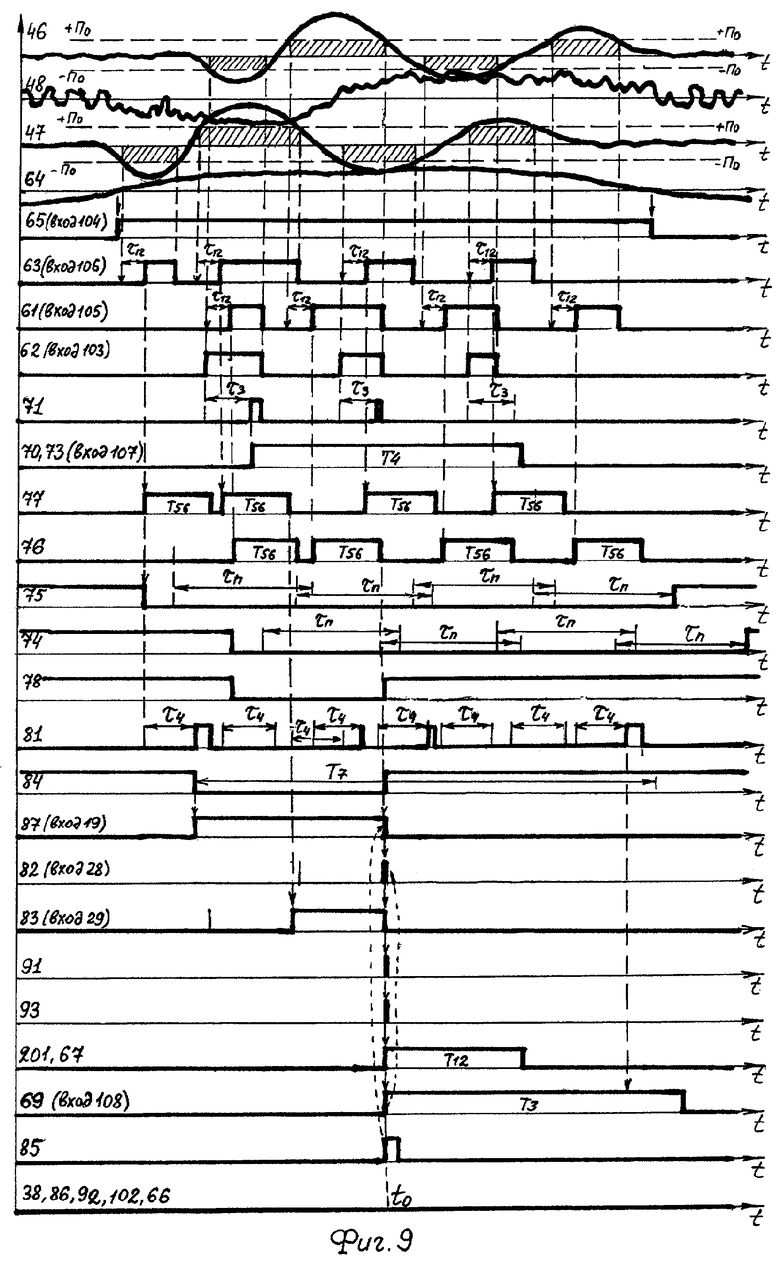


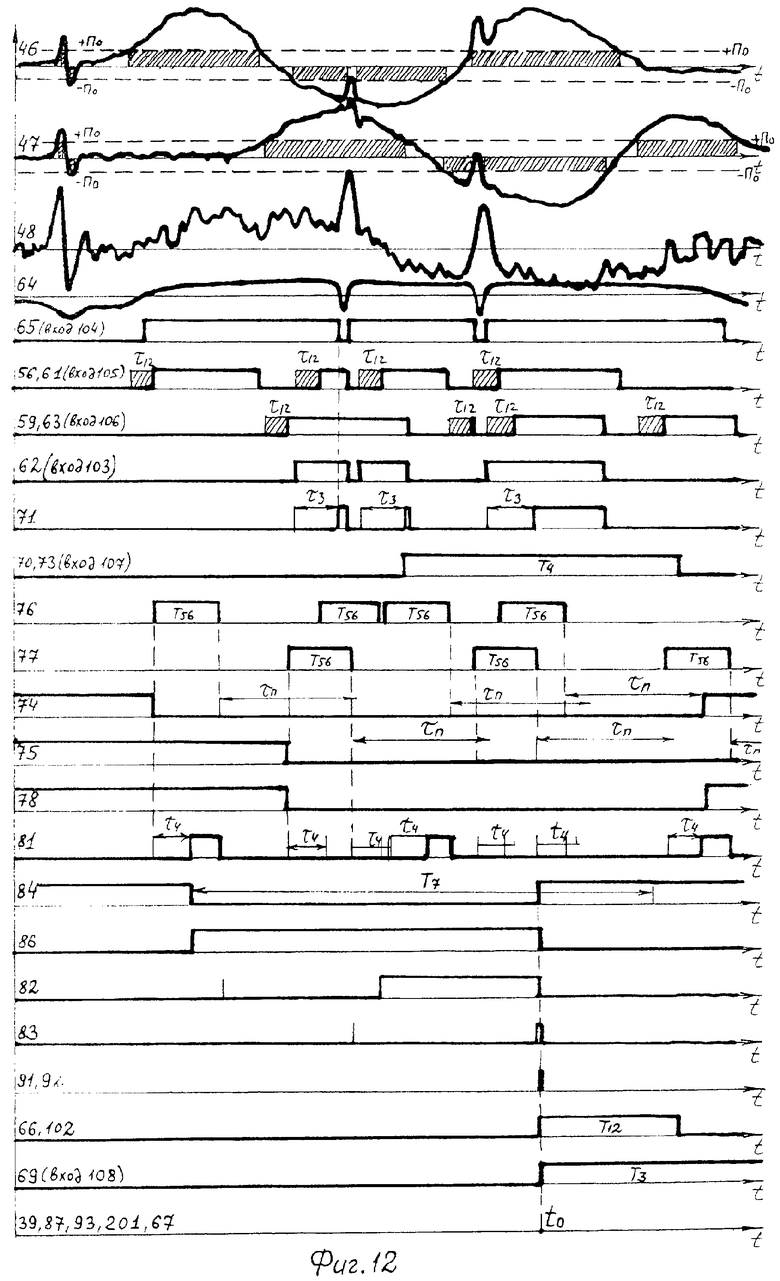
Изобретение относится к области охранной сигнализации, более конкретно к магнитометрическим устройствам обнаружения нарушителей и направления их движения, основанным на пассивном способе регистрации изменений магнитного поля, вызванных их пересечением охраняемого рубежа. Техническим результатом изобретения является существенное уменьшение числа ложных тревог устройства и расширение области его применения. Результат достигается тем, что устройство содержит единый кабельный трехлинейный магнитометрический чувствительный элемент, образующий два лежащих рядом одинаковых индукционных дифференциальных сигнальных датчика и индукционный датчик помехи, охватывающий по площади оба сигнальных датчика, сигналы с которых усиливаются, фильтруются и обрабатываются в устройстве таким образом, чтобы в соответствии с отличительными признаками устранить помехи и выделить полезные сигналы, обусловленные нарушителем, в соответствии с которыми устройство выдает выходные сигналы. 5 з.п. ф-лы, 12 ил.
| US 4052595 A, 04.10.1977.RU 2210116 C1, 10.08.2003.RU 2106692 C1, 10.03.1998.US 3745450 A, 10.07.1973.US 2004135687 A, 15.07.2004.GB 1393122 A, 07.05.1975. |

