Изобретение относится к области охранной сигнализации, более конкретно к магнитометрическим устройствам (средствам, извещателям) обнаружения нарушителей, основанным на пассивном способе регистрации изменений магнитного поля, вызванных их пересечением охраняемого рубежа, и может быть использовано для скрытного сигнализационного блокирования периметра или рубежа охраняемого объекта.
Такие магнитометрические устройства формируют объемную зону обнаружения вдоль рубежа и вырабатывают выходной сигнал тревоги при вторжении в нее нарушителей, имеющих при себе или в своем составе ферромагнитные части или предметы, обладающие остаточной или наведенной намагниченностью (например, инструмент, оружие, листы железа). В магнитометрических устройствах для охранной сигнализации нарушитель обнаруживается по вносимым им изменениям в существующее магнитное поле Земли, контролируемое в зоне обнаружения с помощью распределенного пассивного индукционного магнитометрического преобразователя (МП), обычно размещенного в грунте.
Магнитометрический преобразователь конфигурируется так, чтобы его проводники образовывали пространственно-распределенный контур, чувствительный к изменению магнитного потока (вызываемого нарушителем), которое по принципу электромагнитной индукции преобразуется в сигнал напряжения. Контур, как правило, имеет дифференциальную структуру или балансировку, уменьшающую действие мощных «дальних» электромагнитных помех, практически не ослабляя полезные сигналы, вызываемые нарушителем в ближней зоне обнаружения.
Преобразователем может являться:
1) соленоид, намотанный вокруг и вдоль ферромагнитного сердечника, у которого периодически изменяется на противоположное направление намотки, образующий вдоль рубежа охраны однолинейную структуру [1];
2) плоский (планарный) 8-образный контур с перекрестиями, образующий вдоль рубежа охраны двухлинейную структуру [2];
3) два планарных U-образных контура, включенных дифференциально, образующих вдоль рубежа трехлинейную структуру [3].
Сигналы напряжения с МП усиливаются, фильтруются и обрабатываются (дискриминируются) в соответствии с заданным алгоритмом обработки информации, заложенным в устройстве. Если сигналы идентифицируются как полезные, т.е. обусловленные нарушителем, то на выходе устройства формируется сигнал тревоги. Если сигналы идентифицируются как помеховые, сигнал тревоги не вырабатывается. При этом магнитометрическое устройство для охранной сигнализации должно обладать высокой обнаружительной способностью (чувствительностью), чтобы минимизировать вероятность пропуска нарушителя, и высокой помехоустойчивостью, чтобы при воздействии различных помех природного и промышленного происхождения не вырабатывать сигналы ложных тревог.
Существует известный компромисс между обнаружительной способностью и помехоустойчивостью устройств: с повышением чувствительности при прочих равных условиях их помехоустойчивость уменьшается. Увеличение чувствительности необходимо для расширения области применения магнитометрических устройств для охранной сигнализации или увеличения классов обнаруживаемых объектов - нарушителей, полезные сигналы от которых, в первом приближении, пропорциональны величине дипольного магнитного момента, который интегрально характеризует полезные магнитные свойства нарушителей (массу, намагниченность) [4].
У людей присущий магнитный момент в среднем на 2...3 порядка меньше, чем у транспорта, поэтому их обнаружение требует увеличения чувствительности устройств обнаружения транспорта в 100 и более раз. Это неминуемо ведет к существенному возрастанию потока ложных тревог, особенно в зоне действия индустриальных электромагнитных помех.
Известно магнитометрическое устройство обнаружения объектов, пересекающих оборудованный рубеж и имеющих ферромагнитные предметы, использующее сборный однолинейный магнитометрический преобразователь [1]. Преобразователь представляет собой набор последовательно включенных одинаковых секций, каждая из которых представляет собой катушку с периодически изменяющимся направлением намотки с сердечником.
Сердечник состоит из семи или девятнадцати (для повышения чувствительности) проволок диаметром 1 мм каждая, изготовленных из магнитного сплава, состоящего на 80% из никеля, 15% железа и 5% молибдена. Такой сплав обеспечивает магнитную проницаемость около 1200. Катушка изготовлена из медного провода марки AWG 30 с изменяющимся (каждые 2,5 метра) направлением намотки.
Такая структура магнитометрического преобразователя позволяет получить наибольший коэффициент подавления «дальних» помех, обладает существенными тактическими преимуществами ввиду однолинейности и простоты его монтажа.
Однако описанный МП обладает существенными недостатками - технологической сложностью изготовления каждой секции, большим весом и дороговизной, а также неравномерностью чувствительности к ориентации объекта обнаружения - диполя с магнитным моментом М: если движение нарушителя происходит над серединой сегмента, то преобразователь чувствителен только к горизонтальной составляющей момента My, параллельной условной оси его распространения (у); если движение нарушителя происходит над стыком соседних сегментов, то преобразователь чувствителен к вертикальной Mz и второй горизонтальной составляющей Мx. Поэтому при определенной ориентации диполя М (в общем случае равновероятной в полном телесном угле), движение которого в зоне обнаружения прогнозируется коллинеарным, возможно появление нулевого полезного сигнала.
Практически, поскольку движение диполя не является чисто коллинеарным, это приводит к уменьшению полезного сигнала в несколько раз (по сравнению со средним) и снижению вероятности обнаружения в целом. В любом случае неравномерность чувствительности магнитометрического преобразователя к перемещению диполя вдоль длины достигает ±30%.
Известно также магнитометрическое устройство для охранной сигнализации, содержащее МП, усилитель сигнала, трансформатор и фильтр низких частот [2]. Устройство предназначено для пассивного обнаружения объектов с ферромагнитными предметами, перемещающихся через охраняемый рубеж. Магнитометрический преобразователь в виде плоского двухлинейного 8-образного проводного контура заглублен в грунт. Объект-нарушитель, двигающийся со скоростью не менее Vмин, пересекает зону обнаружения, вызывая появление полезных сигналов на выходе датчика. Этот сигнал усиливается, фильтруется, дискриминируется по амплитуде пороговыми элементами. Отстройка от воздействия помех обеспечивается 8-образной дифференциальной конфигурацией МП и выбором оптимального диапазона регистрируемых частот.
Недостатком этого устройства является его низкая помехоустойчивость к мощным электромагнитным помехам, поскольку помехи с большим пространственным градиентом в принципе не могут быть скомпенсированы в самом индукционном датчике ввиду того, что уменьшение его размеров, снижающее действие помехи, ведет к уменьшению чувствительности датчика и зоны обнаружения устройства. Реально достижимая на местности степень балансировки планарного индукционного 8-образного МП составляет около 40 дБ [4]. Поэтому даже значительные изменения в магнитном поле Земли, вызываемые магнитными бурями, в 100 и более раз превышающие величину порога обнаружения, будут приводить к ложным тревогам.
Неизбежные конструкционно-технологические различия, такие как чувствительность и степень балансировки МП, усиление усилителей, постоянные времени полосовых фильтров, величины порогов элементов, ухудшают помехоустойчивость устройства в случае действия мощных электромагнитных помех.
Известно также магнитометрическое устройство для охранной сигнализации [3], предназначенное для обнаружения преимущественно транспорта и отличающееся от предыдущего тем, что МП состоит из двух параллельно расположенных одновитковых 8-образных дифференциальных петель и недифференциальной петли, охватывающей по площади обе сигнальные петли и образующей датчик помехи, включенный в схему защиты, и последовательно соединенные с ним усилитель, полосовой фильтр, дискриминаторы длительности импульса, детекторы огибающей, инвертирующий усилитель, аналоговый сумматор, узел разрешения, узел счета и анализатор.
Недостатком этого устройства являются достаточно высокие требования к монтажу магнитометрического преобразователя (соблюдению геометрической точности при укладке его в грунт). Неизбежные конструкционно-технологические различия, такие как чувствительность и степень балансировки петель, ухудшают помехоустойчивость устройства в случае действия мощных электромагнитных помех.
В силу низкой помехоустойчивости использовать данное устройство (путем увеличения усиления) для обнаружения вооруженных людей не представляется возможным, что сужает область его применения. Поскольку выходной сигнал с индукционного датчика пропорционален скорости изменения магнитного потока или скорости движения объектов обнаружения, то при малой скорости их движения возможны пропуски тех, которые обладают относительно малым магнитным моментом (например, велосипеды).
Наиболее близким по технической сущности к заявляемому является устройство [5], предназначенное для обнаружения объектов, таких как корабли или поезда, по вносимым в магнитное поле Земли изменениям. Устройство содержит петлевой магнитометрический преобразователь, сигналы от объектов обнаружения с которого поступают на нановольтовый предусилитель, обеспечивающий увеличение соотношения сигнал/шум; режекторный фильтр, активный интегратор, предназначенные для первичной обработки сигнала и управления усилением предусилителя; пороговое устройство, по срабатыванию которого судят о пересечении линии расположения магнитометрического преобразователя объектом обнаружения.
Достоинством описанного устройства является простота его магнитометрического преобразователя и устройства в целом.
Основным недостатком устройства является его крайне низкая помехоустойчивость, что связано, в первую очередь, с недифференциальной структурой преобразователя.
Общим недостатком описанных устройств является их неравномерная чувствительность к ориентации объекта обнаружения с дипольным магнитным моментом М. Если движение нарушителя происходит над серединой сегмента, то чувствительность к горизонтальной составляющей момента My, параллельной оси у, нулевая; если движение нарушителя происходит над стыком соседних сегментов, то преобразователь не чувствителен к вертикальной Mz и второй горизонтальной составляющей Mx. Практически, при «неблагоприятной» ориентации магнитного момента это приводит к уменьшению полезного сигнала в несколько раз по сравнению со средним значением и снижению вероятности обнаружения магнитометрических устройств. В общем случае (при равновероятной ориентации диполя в полном телесном угле) в месте перекрестия двухлинейного МП чувствительность уменьшается вдвое.
Целью настоящего изобретения является уменьшение неравномерности чувствительности магнитометрического преобразователя к ориентациям магнитного диполя.
Для достижения поставленной цели решается задача создания магнитометрического преобразователя, обладающего простотой конструкции и технологии изготовления, малыми стоимостью и весом, а также равномерностью чувствительности к различным ориентациям магнитного диполя в пространстве и дифференциальной структурой.
Сущность изобретения поясняется чертежами, где:
на фиг.1 изображена структурная схема устройства;
на фиг.2 изображена модель обнаружения диполя винтообразным преобразователем;
на фиг.3-5 изображены сигнатуры и спектральные плотности полезных сигналов при различных ориентациях магнитного диполя;
на фиг.6-7 изображены зависимости уровней полезного сигнала от параметров преобразователя и ориентации магнитного диполя.
Устройство состоит из винтообразного однолинейного магнитного преобразователя 1, малошумящего предусилителя 2, усилителя 3, полосового фильтра 4, интегратора 5 и порогового устройства 6.
Устройство работает следующим образом. При перемещении объекта обнаружения над винтообразным однолинейным распределенным магнитометрическим преобразователем 1 в последнем образуется сигнал, поступающий на вход устройства (фиг.1), состоящего из малошумящего предусилителя 2, усилителя 3, полосового фильтра 4, интегратора 5 и порогового устройства 6. Преобразователь 1 представляет собой квазидвухлинейный контур шириной а, который по мере своего распространения вдоль рубежа охраны (ось y) равномерно скручивается в винт с шагом - базой 2b (фиг.2), при этом чувствительная плоскость (между двумя проводниками) также испытывает аналогичное вращение с шагом 2b.
Перемещение ферромагнитного предмета в магнитном поле Земли вызывает изменение магнитного потока, которое в МП 1 преобразуется по принципу электромагнитной индукции в напряжение. Сигналы напряжения с МП 1 усиливаются в предусилителе 2 и усилителе 3 с целью увеличения соотношения сигнал/шум. Полосовой фильтр 4 с полосой пропускания 0,1-40 Гц предназначен для подавления помех от промышленной сети 50 Гц и других высокочастотных источников. Усиленное до необходимого уровня, отфильтрованное в заданной полосе частот напряжение сигнала поступает на интегратор 5, где происходит накопление энергии сигнала до установленного уровня, необходимого для срабатывания порогового устройства 6. Срабатывание последнего позволяет сделать вывод о перемещении объекта-нарушителя (магнитного диполя) над магнитометрическим преобразователем.
Примером описанной структуры преобразователя является нашедший широкое применение в отрасли связи двухжильный изолированный скрученный провод П-274, у которого одинаковое расстояние (а≈2 мм) между жилами обеспечивается удвоенной толщиной изоляции. Один конец МП закорачивается, с другого снимается полезный сигнал U. Длина сегмента составляет 2b, количество сегментов в преобразователе достаточно велико (n>>1), чтобы такой преобразователь мог считаться бесконечным. В силу симметричности и дифференциальной структуры преобразователь практически нечувствителен к «дальним» помехам, степень их подавления определяется технологией изготовления (неизменность величин а и b вдоль длины), а не качеством монтажа.
Коллинеарное движение диполя М происходит с постоянной скоростью V ортогонально линии распространения «бесконечного» МП, кратчайшее расстояние до преобразователя равно H (реально 2nb>>Н).
Такая модель принята и соответствует реальной ситуации [6, 7]. Положим также, что а<<Н, т.е. ширина чувствительной плоскости пренебрежительно мала. Тогда такой МП можно считать однолинейным.
Выберем начало О декартовой системы координат в центре МП - там, где чувствительная плоскость горизонтальна (фиг.2); это есть первая базовая модель. Текущие координаты диполя есть О1 (х; 0; Н), при этом  Расстояние от диполя до любой точки МП (0, у, 0) есть
Расстояние от диполя до любой точки МП (0, у, 0) есть  максимальное приближение диполя к преобразователю составляет Н.
максимальное приближение диполя к преобразователю составляет Н.
Элементарные чувствительные площади dSz и dSx с нормалями, соответственно параллельными осям Oz и Ох, равны:


в то же время для любого у справедливо dSy≡0 (фиг.2).
Ориентация магнитного диполя М в пространстве характеризуется компонентами (фиг.2), которые в процессе коллинеарного движения не изменяются:



В любой точке преобразователя на расстоянии R(x, у, Н) диполь создает магнитную индукцию В(х, y, z) (раскладывающуюся на компоненты Bx, By, Bz), которая через элементарную площадь dS создает элементарный поток dФ=(B·dS).
В силу свойства скалярного произведения dФ=dФх+dФу+dФz, где элементарные потоки через элементарные площади соответственно равны:



Выражения для компонент Вх(х, y, z), Bz(x, y, z) известны [2]:

где 
Суммарный поток вектора магнитной индукции диполя, охватываемый преобразователем, с учетом (3) есть:

С учетом (1) интеграл (5) по поверхности преобразователя сводится к двойному интегралу в пределах, ограниченных площадью преобразователя:

В силу того, что а<<R (или H), принимаем, что при изменении переменных х и z в пределах (-а/2...+а/2) величины соответственно Bz и Bx практически не изменяются, поэтому:

С учетом (7) формула (6) упрощается и имеет вид:

По закону электромагнитной индукции полезный сигнал на выходе преобразователя равен U=-dФ/dt. Так как при перемещении диполя изменяется только координата х, и  , то U=-V·∂Ф/∂х. С учетом (4), (5) и (8) из последнего выражения получается, что
, то U=-V·∂Ф/∂х. С учетом (4), (5) и (8) из последнего выражения получается, что

где 
Подстановкой λ=y-η, с учетом (4) и четности/нечетности подынтегральных функций, выражения (10) сводятся к:

Интегралы (11) согласно [8, 9] - табличные и сопряжены с вычислением модифицированных функций Бесселя 2-го рода К2(γ) и 1-го рода К1(γ) от аргумента

где χ=х/Н - относительная переменная, изменяемая во времени.
Получено, что:

Чтобы получить аналитическое решение (13), воспользуемся известным разложением в ряд бесселевых функций согласно [8] при условии γ>1, которое выполняется на практике:


откуда следует:

что дает преобразование системы уравнений (13) до вида:

С учетом (14) формулы (11) приобретают вид:

Из (9) с учетом (15), взяв первую производную по х, можно получить выражение для расчета полезного сигнала с МП: U1=U(x). Его удобно представить в виде зависимости U1(χ) относительно переменной - нормированной координаты χ (12):

где 
Выражение (16) является основным уравнением сигналообразования по первой базовой модели перемещения нарушителя, описанной выше (фиг.2).
Если сдвинуть начало О декартовой системы (фиг.2) координат на b/2 (влево или вправо), то получим вторую базовую модель обнаружения: в центре МП чувствительная плоскость - вертикальная.
Тогда элементарные площади dSx и dSz с нормалями, соответственно параллельными осям Ох и Oz, будут равны:


Выражения (8) приобретают вид:

Выражения (10) принимают «дуальный» вид:
Соотношения (11) принимают вид:
Выражения (15) принимают вид:

Выражение для расчета полезного сигнала (ПС) с выхода магнитометрического преобразователя по второй базовой модели приобретает вид:

где
Выражение (21) является основным уравнением сигналообразования по второй базовой модели перемещения нарушителя: y0=b/2 (фиг.2).
Моделирование в MathCAD-2001 по уравнениям (16) и (22) позволяет получить две основные формы сигнатур полезных сигналов при перемещении нарушителя над «узловыми точками» МП: х1=К·b и х2=(К+1/2)·b, К=0;±1; ±2...
Движение нарушителя в любой промежуточной точке порождает сигнатуру, которая является переходной формой из одной в другую. Переход от сигнатур к временной переменной осуществляется с помощью выражения t=χ·H/V.
Важной закономерностью полезных сигналов является то, что, несмотря на существенные различия сигнатур, спектральные плотности (FFT) практически не изменяются.
На фиг.3а представлены сигнатуры полезных сигналов U1x и U2x по обеим моделям обнаружения для случая М=Мx, т.е. ориентации магнитного момента диполя вдоль линии перемещения диполя. Принято: а=2·10-3 м; H=0,5 м; b=1,5 Н=0,85 м; М=10 Ам2; V=1 м/с. На фиг.3б показаны соответствующие модули спектральных плотностей S1x и S2x; единица частоты по оси абсцисс есть  .
.
На фиг.4а представлены сигнатуры полезных сигналов U1y и U2y по обеим моделям обнаружения для случая М=My, т.е. ориентации магнитного момента диполя вдоль линии распространения МП; числовые параметры модели - такие же. На фиг.4б показаны соответствующие спектральные плотности S1у и S2y.
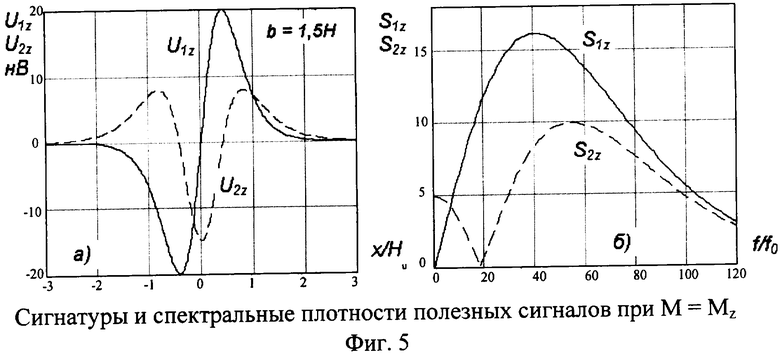
На фиг.5а представлены сигнатуры полезных сигналов U1z и U2z для случая М=Mz, т.е. ориентации магнитного момента диполя перпендикулярно плоскости XOY (поверхности Земли); числовые параметры модели - аналогичные. На фиг.5б показаны соответствующие модули спектральных плотностей S1z и S2z.
Из графиков на фиг.3-5 видно, что в отличие от традиционных винтовой МП чувствителен к любой ориентации магнитного момента обнаруживаемого диполя, но неодинаково. В наибольшей степени магнитометрический преобразователь чувствителен к компоненте дипольного момента My, в наименьшей - к компоненте Мх (разница по чувствительности достигает 9 дБ).
ПС имеют плавный характер и симметричную сигнатуру двух типов:
1) максимальный экстремум при х=0 и два противоположных по знаку экстремума (в 2...3 раза меньше) при х=±(0,7...1,0)Н;
2) два одинаковых по модулю и разных по знаку экстремума при х=±(0,33...0,5)Н.
ПС «быстро» стремятся к нулю за границами интервала Δx=±1,5 Н, при переходе к переменной времени реальная длительность ПС (на уровне более 10% от максимума) составляет Δt≈3H/V. Для человека (Vmax=5 м/с, Н=1,5 м) Δt≥1,0 с, для транспорта (Vmax=15 м/с, Н=0,5 м) Δt≥0,1 с. То есть полезные сигналы являются достаточно низкочастотными, их спектр реально не шире 10 Гц.
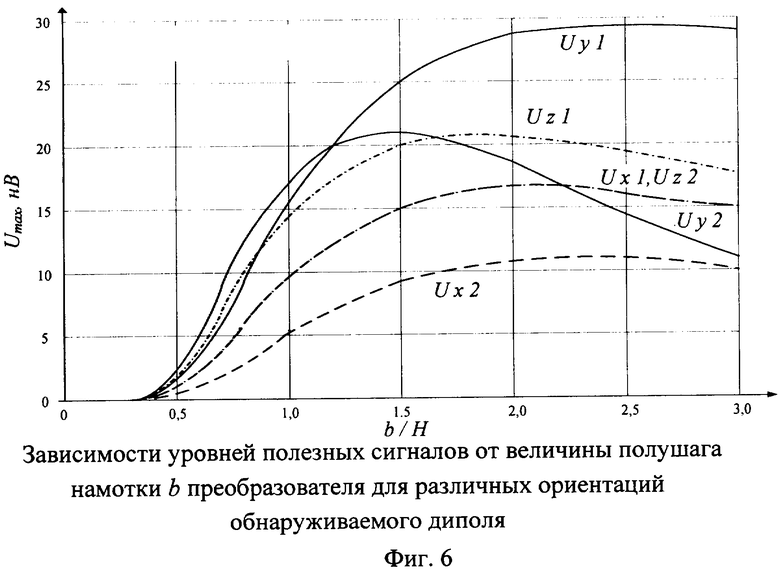
Выражения (16) и (22) исследовались на предмет поиска оптимального полушага намотки b0, который максимизирует амплитуду ПС. На фиг.6 показаны графики амплитуд сигналов Uik(i=х, y, z соответствуют ориентации диполя, k=1, 2 соответствуют модели) в зависимости от величины полушага намотки b (а=2·10-3 м; H=0,5 м; М=10 Ам2; V=1 м/с). При b≤0,1 H полезный сигнал затухает очень быстро (экспоненциально), для таких расстояний рассматриваемый МП более эффективно подавляет «дальнюю» помеху, чем обычные распределенные преобразователи [6, 7].
Для сигналов Ux1 и Ux2 (М=Мx) максимумы (соответственно 16,4 нВ и 10,8 нВ) достигаются соответственно при b0x1=2,1·Н и b0x2=2,3·Н.
Для сигналов Uy1 и Uy2 (М=My) максимумы (соответственно 29,5 нВ и 21,1 нВ) достигаются соответственно при b0y1=2,5·Н и b0y2=1,5·Н.
Для сигналов Uz1 и Uz2 (М=Мz) максимумы (соответственно 20,7 нВ и 16,4 нВ) достигаются соответственно при b0z1=1,8·H и b0z2=2,1·Н.
При b≥2,1 возрастание сигнала Uy1 составляет не более 1%, в то время как другие сигналы уменьшаются. Таким образом, возможный диапазон выбора полушага винтового преобразователя составляет 3 дБ:

На выбор оптимального полушага b0 из (17) могут в общем случае оказывать влияние два обстоятельства:
1) уменьшение величины полушага b0 ведет к уменьшению влияния «дальних» электромагнитных помех, к повышению «дифференциального» качества преобразователя;
2) наибольшая средняя величина полезного сигнала достигается при b≈2·Н (фиг.7), однако эта зависимость - пологая, и для b=1,5 разница не превышает 6%.
В силу вышесказанного оптимальное значение полушага МП выбирается:

В зависимости от ориентации диполя максимальный разброс амплитуд ПС составляет около 8 дБ, среднеквадратичный разброс (при усреднении по всем α, β) не превышает ±15%. Таким образом, по сравнению с традиционными винтообразный преобразователь имеет существенно меньшую неоднородность чувствительности по длине (реально меньше в 2,5...3 раза).
В большинстве реальных ситуаций величину Н модели обнаружения точно оценить невозможно, поэтому выбор b0 может изменяться в пределах ±3 дБ относительно наиболее вероятного Н0:

В среднем, меньшее значение обеспечивает большую помехоустойчивость, большее значение обеспечивает увеличение амплитуды ПС.
При b0=1,5 Н амплитуда ПС, усредненных по всем (α, β), составляет (фиг.7):

Формула (26) может использоваться в инженерных расчетах чувствительности МП к различным моделям обнаружения, зная величину дипольного момента (М), скорость (V) и удаленность (H) его перемещения.
Величина f0 - основная частота, при которой спектральная плотность достигает максимума и вокруг которой группируется энергия сигнала, поэтому желательно, чтобы при фильтрации она находилась внутри диапазона регистрируемых частот Δf.
- основная частота, при которой спектральная плотность достигает максимума и вокруг которой группируется энергия сигнала, поэтому желательно, чтобы при фильтрации она находилась внутри диапазона регистрируемых частот Δf.
Для надежной регистрации ПС полосовой фильтр магнитометрического устройства должен пропускать, как правило, не менее 80-90% энергии сигнала. Используя теорему Парсеваля [10], связывающую энергию во временной и частотной области, с помощью функции суммирования квадратов составляющих линейчатого спектра FFT, можно определить необходимые граничные частоты: верхнюю fв - для фильтра низких частот (ФНЧ) и нижнюю fн - для фильтра высоких частот (ФВЧ).
При моделировании спектров FFT получено, что спектры полезных сигналов с различной ориентацией диполя достаточно «похожи» и достигают максимума на характеристической частоте (при b=1,5 Н):

С уменьшением соотношения b/Н в указанном по (25) диапазоне 6 дБ величина f0 увеличивается в пределах (0,67...0,88)·V/H, т.е. незначительно. Наиболее высокочастотным является сигнал Ux(f0x≈0,93V/H при b=1,5 Н), сигнал Uy - наиболее низкочастотным (f0y≈0,58 V/H). Поскольку сигнал Uy в среднем на 8 дБ больше, то существует возможность (для известной модели обнаружения) выбором fн ФВЧ уменьшить неравномерность МП в зависимости от ориентации диполя - нарушителя.
Для конструкционного оптимума b/Н=1,5 определены нижние fн и верхние fв граничные частоты (таблица 1), ограничивающие 90% и 95% энергии спектра полезных сигналов Ux(t), Uy(t), Uz(t).
Частоты, ограничивающие 90% и 95% энергии полезных сигналов с выхода «винтового» распределенного магнитометрического преобразователя
Ориентация диполя
Усредненный (по всем возможным ориентациям диполя) диапазон регистрируемых частот, в котором заключается не менее 90% энергии, составляет:

Усредненный диапазон частот, включающий не менее 95% энергии:

Поскольку объект обнаружения движется со скоростью, прогнозируемой в диапазоне Vmin...Vmax, то для нижней граничной частоты необходимо пользоваться Vmin, для верхней - Vmax. Для модели обнаружения человека (V=0,5...5 м/с, Н=1,5 м) получается Δf0,9=0,17...4,3 Гц; для модели обнаружения транспорта (V=1...15 м/с, Н=0,5 м) получается, что Δf0,9=1...40 Гц. Таким образом, исходя из критериев «охвата энергии» (28) и (29), необходимо обеспечить достаточно широкий диапазон регистрируемых частот (около 30 дБ).
Вследствие низкочастотного характера сигналов на практике возникают трудности с реализацией необходимого значения fн. Кроме того, известно, что спектральные плотности мощности геомагнитного шума - одного из главных помеховых факторов МСО, а также других электромагнитных индустриальных шумов распределены по закону, близкому к 1/f2 [11]. Поэтому выбор нижней граничной частоты ФВЧ должен быть по возможности наиболее точным.
Учет 1/f2 - фактора шума по критерию максимума отношения сигнал/шум сужает диапазон регистрируемых частот, следовательно, величина fн возрастает. Поскольку точная сигнатура ПС априорно неизвестна (вследствие вариаций в модели обнаружения α, β, H, V), то согласованный фильтр для максимизации соотношения сигнал/шум реализовать невозможно. Квазиоптимальный фильтр, приближающийся по своим параметрам к оптимальному, может быть построен для выбранных параметров модели движения диполя (H, V) на основании аппроксимаций спектральных плотностей ПС.
Как показывают результаты моделирования, вследствие «похожести» спектров сигналов на частотах свыше f≥0,4·V/H (таблица 1), где наблюдается свыше 90% энергии сигналов, возможна единая аппроксимация.
При этом модуль спектральной плотности S(f) полезного сигнала U с точностью не хуже 10% аппроксимируется дробно-рациональной функцией вида:

где К - коэффициент пропорциональности;
f0 - частота по формуле (27).
Математическое моделирование полезных сигналов с выхода предлагаемого однолинейного винтового магнитометрического преобразователя по базовым уравнениям (16) и (22) позволило выявить закономерности процесса обнаружения нарушителя - магнитного диполя.
Полученные соотношения, связывающие основные параметры объекта обнаружения (скорость, высота перемещения) и преобразователя (база или шаг), позволяют оптимизировать конструкцию и осуществить корректный выбор диапазона регистрируемых частот.
Устройство обладает большей помехоустойчивостью к действию дальних мощных электромагнитных помех и вероятностью обнаружения объектов ввиду обладания меньшей неравномерностью чувствительности магнитометрического преобразователя к различным ориентациям магнитного диполя (объекта обнаружения) в пространстве.
Магнитометрический преобразователь не предполагает сложной технологии изготовления и установки на местности, имеет низкую погонную стоимость, обладает малыми массогабаритными характеристиками.
Заявляемое устройство вследствие пассивного способа обнаружения и размещения в грунте или дорожном полотне не оказывает отрицательного воздействия на состояние окружающей среды.
Источники информации
1. Патент США US 3747036, опубликован 17.07.1973.
2. Патент США US 3508238, опубликован 21.04.1970.
3. Патент РФ RU 2276410, опубликован 01.2006.
4. Звежинский С.С, Ларин А.И. Периметровые маскируемые магнитометрические средства обнаружения // Специальная техника. №4 2001.
5. Патент США US 3863142, опубликован 28.01.1975.
6. Звежинский С.С. Сигналообразование в однолинейном магнитометрическом средстве обнаружения // Проблемы и перспективы разработки, совершенствования и применения технических средств охраны границы: Материалы XVI межвузовской научно-практической конференции: Науч. - метод. сб. №16. - Ч.3, кн.1. - Калининград: КПИ, 2005. - С.55-68.
7. Звежинский С.С. Моделирование периметровых магнитометрических средств обнаружения // Проблемы объектовой охраны: Сб. науч. тр. Вып.3. - Пенза: ИИЦ ПГУ, 2002. - С.69-78.
8. Двайт Г.В. Таблицы интегралов и другие математические формулы. - М.: Наука, 1977. - 228 с.
9. Прудников А.П., Брычков Ю.А., Маричев О.И. Интегралы и ряды. - М.: Наука, 1981. - 800 с.
10. Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 1988. - 448 с.
11. Паркинсон У. Введение в геомагнетизм. - М.: Мир, 1986. - 528 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2004 |
|
RU2276410C1 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2010 |
|
RU2446479C1 |
| СЕЙСМОМАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2001 |
|
RU2210116C2 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ПРИ ИХ ВТОРЖЕНИИ В ОХРАНЯЕМУЮ ЗОНУ | 2013 |
|
RU2559701C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2488889C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ | 2005 |
|
RU2303290C2 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 1988 |
|
RU2106692C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2018 |
|
RU2705770C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ТЕКУЩЕГО МЕСТОПОЛОЖЕНИЯ НАРУШИТЕЛЯ ОХРАНЯЕМОЙ ЗОНЫ | 2005 |
|
RU2311686C2 |
| Комбинированная двухрубежная система охраны периметров объектов | 2018 |
|
RU2683186C1 |




Изобретение относится к области охранной сигнализации, более конкретно к магнитометрическим устройствам (средствам, извещателям) обнаружения нарушителей, основанным на пассивном способе регистрации изменений магнитного поля, вызванных пересечением охраняемого рубежа. Техническим результатом изобретения является повышение помехоустойчивости устройства к действию дальних мощных электромагнитных помех и вероятности обнаружения объектов за счет обладания меньшей неравномерностью чувствительности магнитометрического преобразователя к различным ориентациям магнитного диполя (объекта обнаружения) в пространстве, а также расширение области применения. Результат достигается применением в устройстве винтообразного магнитометрического преобразователя. 7 ил.
Магнитометрическое устройство для охранной сигнализации, содержащее последовательно соединенные магнитометрический преобразователь, малошумящий предусилитель, усилитель, полосовой фильтр, интегратор и пороговое устройство, отличающееся тем, что магнитометрический преобразователь выполнен в виде равномерно скрученных в винт изолированных друг от друга проводников, на свободных концах замкнутых друг на друга, у которого ширина чувствительной плоскости пренебрежимо мала по сравнению с максимальным приближением магнитного диполя к преобразователю.
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2004 |
|
RU2276410C1 |
| US 4052595 A, 04.10.1977 | |||
| Датчик магнитометра | 1976 |
|
SU661450A1 |
| US 3863142 A, 28.01.1975 | |||
| СЕЙСМОМАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2001 |
|
RU2210116C2 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 1988 |
|
RU2106692C1 |

