Область техники
Настоящее изобретение относится к способу контроля мгновенного поведения шины и ее взаимодействия с дорогой при движении автомобиля, оснащенного шинами, и к системе для его осуществления.
Предшествующий уровень техники
Шина автомобиля при качении по дорожной поверхности подвергается воздействию вертикальной нагрузки и внешних тангенциальных и поперечных сил, которые возникают при различных маневрах, таких как торможение, ускорение, поворот, движение по прямой и т.д.
В ходе каждого маневра любая точка шины, катящейся в устоявшемся состоянии и в переходных состояниях, совершает движение, которое может быть представлено смещениями в трех направлениях в пространстве для каждого цикла оборота шины. Движение любых точек имеет характеристики, которые типичны для положения каждой конкретной точки структуры внешнего профиля шины, условий использования (скорость, нагрузка и давление), состояния поверхности, по которой катится шина, и внешних сил, воздействию которых подвергается шина при торможении, ускорении, повороте и т.д.
В заявке на патент ЕР №887211 раскрыта система текущего контроля для шины транспортного средства, содержащая сенсорное устройство, в рабочем положении расположенное в шине для создания электрического импульса при прохождении пятна контакта с опорной поверхностью, соответствующего деформации шины, средство для вычисления отношения длительности указанного электрического импульса к длительности одного оборота шины, средство для передачи значения этого отношения в блок обработки, расположенный в транспортном средстве. Указанное сенсорное устройство расположено в районе протектора указанной шины, чтобы электрический импульс имел первое максимальное значение на входе и второе максимальное значение на выходе из пятна контакта с опорной поверхностью.
В публикации заявки PCT WO 0136241 раскрыт способ текущего контроля мгновенного поведения шины при движении автомобиля, содержащий следующие операции:
получение и сохранение по меньшей мере временно по меньшей мере одной базовой опорной кривой, которая представляет изменение смещения по меньшей мере одной заданной точки шины по меньшей мере в одном направлении в пространстве как функцию пространственного положения точки в ходе по меньшей мере одной части оборота шины,
непрерывное получение сигналов положения в пространстве заданной точки шины,
выведение по сигналам положения по меньшей мере одной циклической кривой рабочего смещения точки в направлении в пространстве, как функции пространственного положения точки в ходе по меньшей мере одной части оборота шины,
непрерывное сравнение указанной кривой рабочего смещения с базовой опорной кривой смещения,
выдачу сигнала, зависящего от сравнения и отображающего мгновенное поведение шины.
В патенте США №6204758 раскрыто устройство текущего контроля шины для использования в дистанционной системе текущего контроля шины, содержащей акселерометр для выявления ускорения устройства текущего контроля шины. Информацию о местоположении (относительно транспортного средства) устройства текущего контроля шины получают на основе ускорения. Таким образом, информацию о положении (относительно транспортного средства) шины получают автоматически, что позволяет системе отображать данные о характеристиках шины, таких как давление воздуха, в соответствии с местоположением шины (спереди справа, спереди слева).
Заявитель обнаружил, что деформации шины при качении возникают во множестве направлений относительно локальной системы отсчета. Локальная система отсчета является системой отсчета, на основе которой выявляют деформации (например, прямоугольная система координат или полярная система координат). Например, деформация шины вследствие изменения нагрузки на шину является по существу деформацией в центростремительном направлении, которое является радиальным направлением шины. В условиях торможения деформации шины происходят большей частью в тангенциальном направлении, которое является касательным направлением относительно окружности указанной шины, и при повороте деформации шины происходят большей частью в поперечном направлении, которое перпендикулярно поперечному и центростремительному направлениям.
Было обнаружено, что ускорения и их изменение с заданным временным интервалом для конкретных точек шины относительно локальной системы отсчета взаимосвязаны с деформациями шины, которые возникают при взаимодействии между движущейся шиной и опорной поверхностью.
Было обнаружено, что для текущего контроля деформаций шины в состоянии качения необходимо определить профиль ускорения по меньшей мере в двух направлениях локальной системы отсчета.
Кроме того, заявитель решал проблему выбора характеристических точек шины, в которых осуществляются измерения профиля ускорения, как функции положения точек, имеющих взаимосвязь друг с другом относительно глобального поведения шины. Кроме того, заявитель провел анализ измеренных кривых ускорений для конкретных точек для по меньшей мере полного оборота шины.
Кроме того, было обнаружено, что каждая из конкретных точек обладает конкретным поведением при взаимодействии между шиной и дорогой.
Для текущего контроля деформаций шины можно сравнивать ускорение первой характеристической точки и ускорение второй характеристической точки. В целом, для получения показаний о поведении шины необходимо осуществлять текущий контроль более, чем в одной характеристической точке шины. Для каждого маневра, который необходимо контролировать, существуют характеристические точки, которые имеют более положительную корреляцию между ускорениями и деформациями шины, чем другие точки самой шины. Деформации выбранных точек взаимосвязаны с мгновенным поведением шины и взаимодействием между дорогой и самой шиной.
Кроме того, ускорения конкретной точки на катящейся шине, которая подвергается воздействию конкретных сил, имеют одинаковую базовую конфигурацию (базовую кривую) для каждого оборота шины, в то время как она изменяется в отношении положения и амплитуды пиков и/или начала и конца каждого пика и относительного максимума и/или минимума и/или "крутизны" конкретных частей кривой.
Заявитель обнаружил, что для текущего контроля поведения шины в ходе указанных выше маневров при движении транспортного средства можно отслеживать заданную часть указанных кривых. Кривые достигают существенных значений вблизи (перед и после) проходимых контролируемыми точками границ физического контакта между шиной и дорогой. Предпочтительно, отслеживаемые части кривых могут быть связаны с конкретными деформациями, соответствующими конкретным явлениям (например, явлению глиссирования, блокирования колеса и т.д.).
Краткое изложение существа изобретения
Задачей настоящего изобретения является создание способа осуществления текущего контроля мгновенного поведения шины при качении. Способ согласно изобретению содержит следующие операции:
а) получение и сохранение по меньшей мере временно по меньшей мере одной опорной кривой, которая представляет профиль ускорения по меньшей мере одной заданной точки шины по меньшей мере в двух направлениях, выбранных из группы, состоящей из центростремительного, тангенциального и поперечного направлений, как функции положения точки по меньшей мере в одной части оборота шины,
b) непрерывное получение сигналов ускорения в по меньшей мере двух направлениях по меньшей мере одной точки шины по меньшей мере в одной части оборота шины,
с) выведение на основе указанных сигналов по меньшей мере одной циклической кривой профиля ускорения по меньшей мере одной точки по меньшей мере в части оборота шины,
d) сравнение по меньшей мере одной циклической кривой с по меньшей мере одной опорной кривой,
е) выдачу сигнала, зависящего от сравнения, при этом сигнал отображает мгновенное поведение шины.
Предпочтительно, операция сравнения содержит сравнение по меньшей мере одной опорной кривой и по меньшей мере одной циклической кривой по точкам для всего оборота шины.
Предпочтительно, операция сравнения содержит сравнение опорной кривой, выведенной по первой точке на шине, и циклической кривой, выведенной по второй точке на шине.
Предпочтительно, первая точка находится на поверхности герметизирующего слоя шины вдоль экваториальной плоскости шины, а вторая точка находится на герметизирующем слое в плечевой зоне шины, причем первая и вторая точки находятся вдоль одной меридиональной плоскости шины.
Предпочтительно, первая точка находится на герметизирующем слое вдоль экваториальной плоскости шины в левой плечевой зоне шины, а вторая точка находится на герметизирующем слое в правой плечевой зоне шины, причем первая и вторая точки находятся вдоль одной меридиональной плоскости шины.
Предпочтительно, первая точка находится на герметизирующем слое вдоль экваториальной плоскости шины, а вторая точка находится на герметизирующем слое вдоль экваториальной плоскости на удалении от первой точки, составляющем заданную дугу.
Предпочтительно, операция сравнения содержит сравнение характеристических пиков по меньшей мере одной опорной кривой с соответствующими характеристическими пиками по меньшей мере одной циклической кривой.
Предпочтительно, операция сравнения содержит сравнение части площади под по меньшей мере одной опорной кривой с соответствующей частью площади под по меньшей мере одной циклической кривой.
Другой задачей настоящего изобретения является создание системы текущего контроля мгновенного поведения шины при качении.
Система контроля согласно изобретению содержит
по меньшей мере один запоминающий элемент для получения и сохранения по меньшей мере временно по меньшей мере одной опорной кривой, которая представляет собой профиль ускорения по меньшей мере одной заданной точки шины по меньшей мере в двух направлениях, выбранных из группы, состоящей из центростремительного, тангенциального и поперечного направлений по меньшей мере в одной части оборота шины,
по меньшей мере один датчик, связанный с по меньшей мере одной заданной точкой шины, способный выдавать в течение периода времени сигналы ускорения точки в указанных направлениях,
принимающее устройство для непрерывного приема сигналов ускорения по меньшей мере одной точки шины по меньшей мере в части оборота шины,
блок обработки, включающий программу для определения на основе указанных сигналов ускорения по меньшей мере одной циклической кривой ускорения по меньшей мере одной точки в указанных направлениях по меньшей мере в части оборота шины,
блок обработки для непрерывного сравнения по меньшей мере одной из циклических кривых ускорения с указанной по меньшей мере одной хранящейся в памяти опорной кривой,
причем блок обработки дополнительно способен выдавать сигнал, соответствующий сравнению и отображающий мгновенное поведение шины.
Предпочтительно, первый датчик размещен на поверхности герметизирующего слоя шины вдоль экваториальной плоскости шины, а второй датчик находится на поверхности герметизирующего слоя в плечевой зоне шины, причем первый и второй датчики находятся в одной меридиональной плоскости шины.
Предпочтительно, первый датчик находится на поверхности герметизирующего слоя вдоль экваториальной плоскости шины в левой плечевой зоне шины, а второй датчик находится на поверхности герметизирующего слоя в правой плечевой зоне шины, причем первый и второй датчики находятся вдоль одной меридиональной плоскости шины.
В альтернативном варианте, первый датчик находится на поверхности герметизирующего слоя вдоль экваториальной плоскости шины, а второй датчик находится на поверхности герметизирующего слоя вдоль экваториальной плоскости на расстоянии от первого датчика, соответствующем заданной длине дуги.
Предпочтительно, система содержит дополнительно третий датчик, расположенный на поверхности герметизирующего слоя вдоль экваториальной плоскости шины на удалении от второго датчика на расстоянии, соответствующем заданной длине дуги.
Предпочтительно, первый, второй и третий датчики находятся на равноудаленном расстоянии друг от друга.
Предпочтительно, в плечевой зоне, противоположной расположению второго датчика, размещен третий датчик, вдоль той же меридиональной плоскости, в которой размещены первый и второй датчики.
Предпочтительно, система дополнительно содержит датчик скорости шины.
Предпочтительно, система дополнительно содержит датчик давления шины.
Дополнительный объект настоящего изобретения относится к пневматической шине, содержащей по меньшей мере один датчик, соединенный по меньшей мере с одной заданной точкой шины, способный выдавать в течение периода времени сигнал, который представляет профиль ускорения по меньшей мере одной заданной точки по меньшей мере в двух направлениях, выбранных из группы, состоящей из центростремительного, тангенциального и поперечного направлений, как функцию положения точки по меньшей мере в одной части оборота шины.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает схему сечения катящейся шины, имеющей датчик, расположенный на ее внутренней поверхности, согласно изобретению;
фиг.2 - вид сбоку катящейся шины, имеющей три датчика, расположенных на внутренней поверхности герметизирующего слоя, согласно изобретению;
фиг.3 - схему сечения катящейся шины (другой вариант осуществления), имеющей три датчика, расположенных на внутренней поверхности герметизирующего слоя, согласно изобретению;
фиг.4 - блок-схему системы контроля поведения транспортного средства согласно изобретению;
фиг.5 а, в, с - три диаграммы - центростремительного, тангенциального и поперечного ускорений заданной точки шины, текущий контроль которой осуществляется датчиком на фиг.1, согласно изобретению;
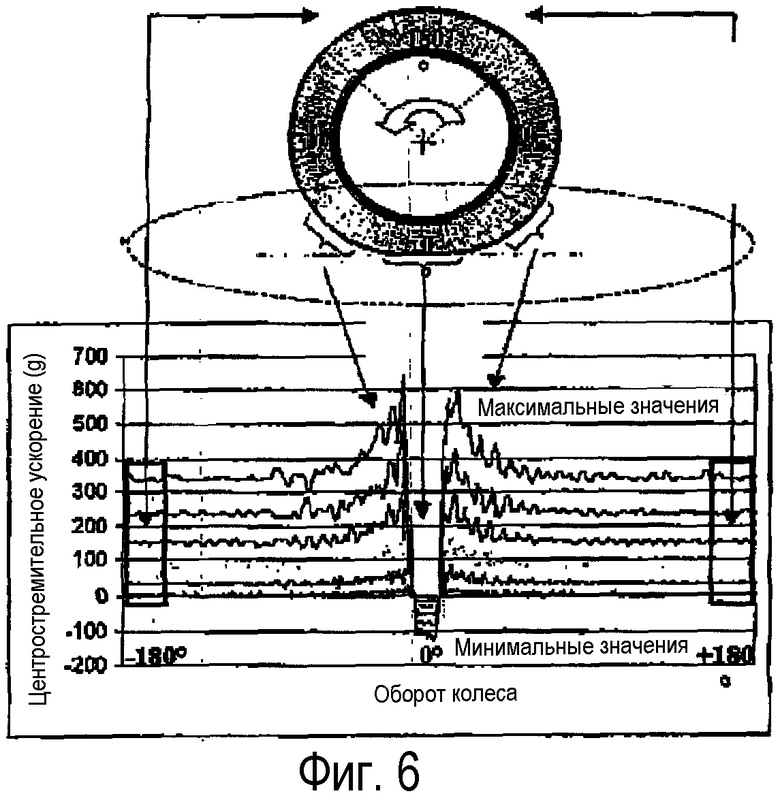
фиг.6 - диаграмму центростремительного ускорения заданных точек шины, текущий контроль которых осуществляется датчиками на фиг.1, при свободном качении с разными скоростями (под одинаковой нагрузкой), согласно изобретению;
фиг.7 - диаграмму центростремительного ускорения заданных точек шины, текущий контроль которых осуществляется датчиками на фиг.3, согласно изобретению;
фиг.8 - диаграмму центростремительного ускорения заданных точек шины, текущий контроль которых осуществляется датчиками на фиг.3, при свободном качении в условиях поворота, согласно изобретению.
Описание предпочтительных вариантов воплощения изобретения
Шина (фиг.1) представляет собой полую тороидальную структуру, сформированную из множества компонентов и в первую очередь из текстильного или металлического каркаса, имеющего два борта, каждый из которых сформирован вдоль внутренней кольцевой кромки каркаса для закрепления шины на соответствующем удерживающем ободе. Каркас содержит по меньшей мере одну пару кольцевых армирующих сердечников, называемых бортовой проволокой, заделанных в указанные борта.
Каркас содержит несущую структуру, сформированную по меньшей мере армирующим слоем, который содержит текстильные или металлические корды, проходящие в осевом направлении от одного борта к другому в соответствии с тороидальным профилем, и каждый конец которого соединен с соответствующей бортовой проволокой.
В шинах так называемого "центростремительного" типа указанные выше корды лежат по существу в плоскостях, включающих ось вращения шины.
На короне этого каркаса расположена кольцевая структура, известная как брекерный пояс, обычно состоящая из одной или более лент прорезиненной ткани, намотанной налагаемыми друг на друга витками для формирования так называемого "ленточного пакета", и протектор, выполненный из эластомерного материала, намотанного вокруг ленточного пакета, на котором отпрессован рельефный рисунок для вхождения с дорогой при качении шины. На каркас также помещены две боковины, выполненные из эластомерного материала, которые проходят в центростремительном направлении наружу от внешнего края соответствующего борта и расположены на противоположных сторонах в осевом направлении.
В шинах, известных как шины "бескамерного" типа, внутренняя поверхность каркаса обычно покрыта "герметизирующим" слоем, т.е. одним или более слоев непроницаемого для воздуха эластомерного материала. Наконец, каркас может иметь другие известные элементы, такие как закраины, ленты и наполнители, в соответствии с конкретной конструкцией шины.
Следует отметить, что в настоящем описании термин "эластомерный материал" обозначает материал, полученный посредством поперечного сшивания резинового состава содержащего, по меньшей мере эластомерный полимер, имеющий по меньшей мере диспергированный в нем наполнитель и обычные добавки, такие как рафинирующие присадки, технологические добавки и т.д.
Комбинация всех этих элементов определяет механические характеристики упругости, жесткости и стойкости к деформации шины, которые образуют связь между системой сил, воздействующих на шину, и величиной соответствующих деформаций, которым она подвергается.
Согласно одному аспекту настоящее изобретение касается измерения изменений ускорения по меньшей мере одной заданной точки шины в заданном временном интервале относительно локальной системы отсчета. Локальная система отсчета представляет собой систему, в которой измеряют значения ускорений и направлений (то есть прямоугольную систему координат или полярную систему координат).
Указанные изменения взаимосвязаны с взаимодействием между шиной в движении и опорной поверхностью и с деформациями самой шины в движении.
Для этого с шиной соединен по меньшей мере один датчик измерения ускорения.
Предпочтительно, с шиной соединены более одного датчика, и каждый датчик расположен в заданной точке шины. Предпочтительно, датчики расположены на внутренней поверхности шины и в контакте с указанным герметизирующим слоем, когда такой слой существует. В альтернативном варианте, один или более датчиков могут быть помещены в герметизирующий слой или в слой протекторного браслета или в каркас шины, то есть в борта при изготовлении. Кроме того, система, согласно настоящему изобретению, может иметь дополнительный датчик, который способен измерять смещение точки относительно локальной системы отсчета (то есть оптический датчик).
В варианте осуществления изобретения (фиг.1) датчик 2 соединен с шиной 1 и расположен на внутренней поверхности шины, в частности, на поверхности 111 герметизирующего слоя. Более предпочтительно, датчик расположен вдоль экваториальной плоскости шины. Например, датчик соединен с поверхностью герметизирующего слоя при помощи клея или кремнийорганического герметика или эластомерного состава, совместимого с герметизирующим слоем.
В альтернативном варианте датчик заделан в герметизирующий слой, или в слой протекторного браслета, или внутрь каркаса, или внутрь борта при изготовлении шины.
Предпочтительно, датчики представляют собой акселерометры, которые могут измерять ускорения точки шины, с которой они соединены, относительно локальной системы отсчета.
В частности, (фиг.1) датчик 2 может измерять профиль ускорения точки Р относительно по меньшей мере двух направлений, выбранных из локальных осей x, y, z координат. Локальные оси x, y, z представляют три направления, которые обозначены как
- центростремительное направление z, которое представляет собой радиальное направление шины,
- тангенциальное направление y, которое представляет собой направление, тангенциальное к окружности шины,
- поперечное направление х, которое представляет собой направление, ориентированное под прямым углом к центростремительному и тангенциальному направлениям.
В этом случае датчик 2 может измерять профиль ускорения точки Р относительно по меньшей мере двух направлений, выбранных из центростремительного направления, тангенциального направления и поперечного направления.
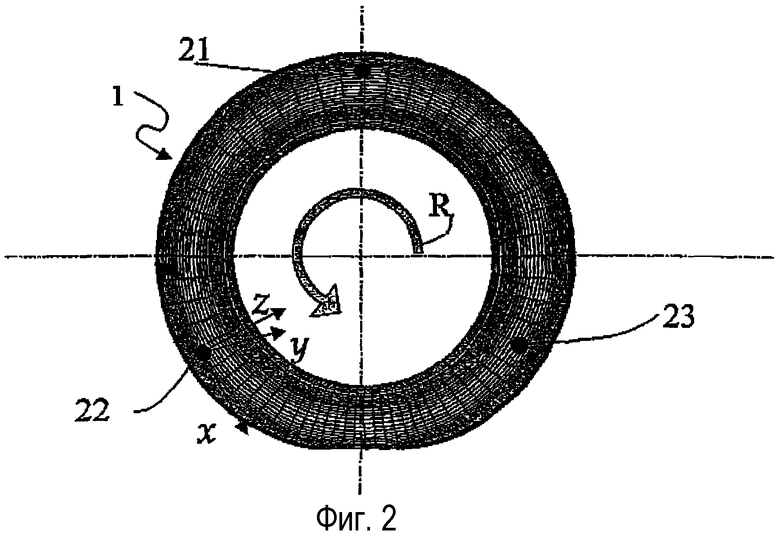
На фиг.2 показан другой вариант осуществления настоящего изобретения, где с шиной 1 соединены три датчика 21, 22 и 23. Предпочтительно, датчики расположены в точках на внутренней поверхности шины. Более предпочтительно, датчики расположены в центре вдоль экваториальной плоскости Е шины, и на равном расстоянии друг от друга. В частности, датчики расположены по окружности на расстоянии друг от друга, равном дуге заданной длины.
Это расположение повышает быстроту, точность и надежность получения информации для улучшения текущего контроля полного оборота колеса. Например, в ходе оборота шины можно осуществлять одновременно первым датчиком контроль ускорения шины при прохождении пятна контакта с опорной поверхностью, вторым датчиком контроль ускорения точки, расположенной перед пятном контакта, и третьим датчиком контроль ускорения точки, расположенной после пятна контакта.
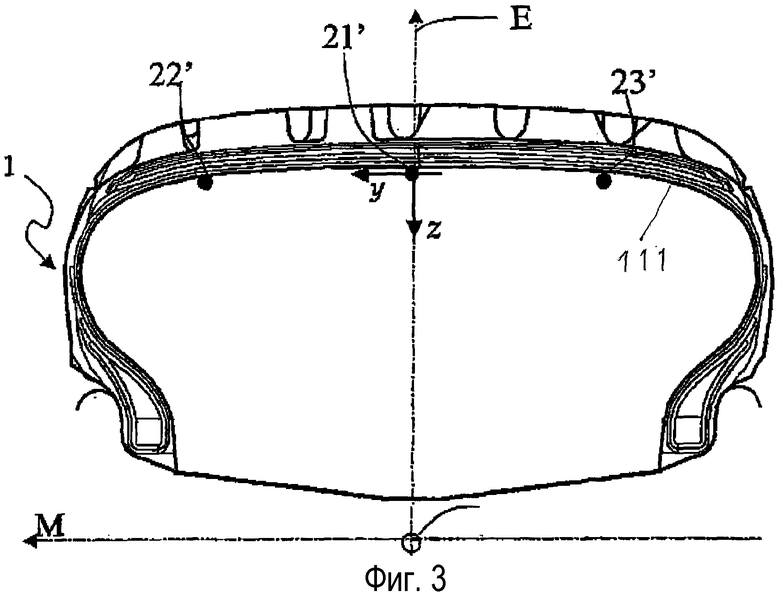
На фиг.3 показан другой вариант осуществления настоящего изобретения, в котором с шиной соединены три датчика 21', 22' и 23'.
Предпочтительно, первый датчик 21' расположен на внутренней поверхности герметизирующего слоя 111 в центральном положении вдоль экваториальной плоскости Е шины. Предпочтительно, два других датчика 22' и 23' расположены на этой же поверхности, причем каждый из них находится между центральной линией и боковинами шины, ниже они называются датчиком 22' левой плечевой зоны и датчиком 23' правой плечевой зоны соответственно. Предпочтительно, датчики 21', 22' и 23' расположены вдоль одной меридиональной плоскости М шины. Указанное расположение позволяет осуществлять текущий контроль общего поведения во всем участке взаимодействия между шиной и дорогой, например, когда шина осуществляет поворот, сигналы, получаемые от двух датчиков 23' и 22', отличаются друг от друга. Другие маневры могут быть выявлены посредством сравнения сигналов от датчиков 21', 22', 23', например, в случае глиссирования.
Следует отметить, что датчики могут быть расположены в других точках шины, чтобы измерять изменения ускорения указанных точек и сравнивать сигналы, получаемые от разных датчиков, если эти точки являются ключевыми точками, способными выдавать информацию о поведении шины в движении.
В альтернативном варианте датчики могут быть связаны с точками шины, расположенными на уровне протектора, или на уровне боковых стенок каркаса, или на уровне герметизирующего слоя, или на уровне борта, или в промежуточных точках. Кроме того, один из датчиков может быть расположен на ободе колеса, в этом случае сравнение сигнала датчика на ободе и других сигналов, полученных от датчика, расположенного на поверхности герметизирующего слоя, может указать относительное перемещение обода и шины, например, при торможении.
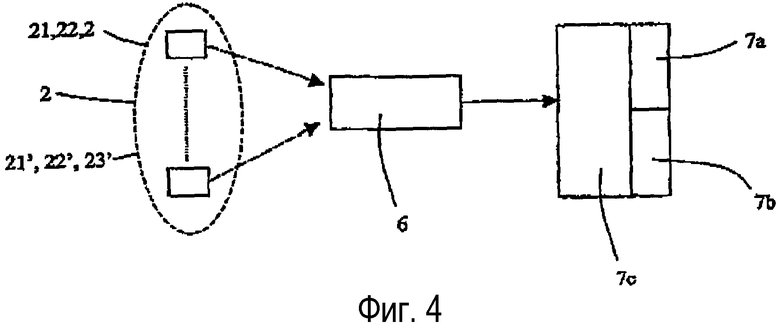
На фиг.4 показан пример выполнения системы контроля поведения транспортного средства. На фиг.4 показаны датчики 2 или 21, 22, 23 или 21', 22' и 23', принимающее устройство 6, соединенное с датчиками, и блок 7 обработки, соединенный с принимающим устройством 6. Блок 7 обработки содержит энергозависимое запоминающее устройство 7а, постоянное запоминающее устройство 7b и процессор 7с. Датчики установлены, как отмечалось выше, в заданных точках шины, тогда как принимающее устройство 6 и блок 7 обработки, предпочтительно, установлены на транспортном средстве. Например, принимающее устройство и блок обработки могут составлять часть бортового компьютера транспортного средства. Принимающее устройство 6 представляет собой, например, электромагнитный высокочастотный приемник.
Предпочтительно, датчики снабжены пьезоэлектрическим устройством или пьезорезистивным устройством или устройством на кварцевой основе для формирования сигнала, представляющего собой ускорение точки, с которой они связаны. Указанный сигнал может быть передан на приемник 6 при помощи радиоволн, более предпочтительно, при помощи высокочастотных радиоволн.
Было обнаружено, что благодаря измерению ускорения характеристических точек каркаса при его движении можно контролировать, подвергается ли шина воздействию торможения, ускорения или поворота, или знать имеющуюся в наличии величину трения между шиной и дорогой, или знать, когда шина находится в состоянии, близком к глиссированию, и находится ли она в зоне неустойчивости.
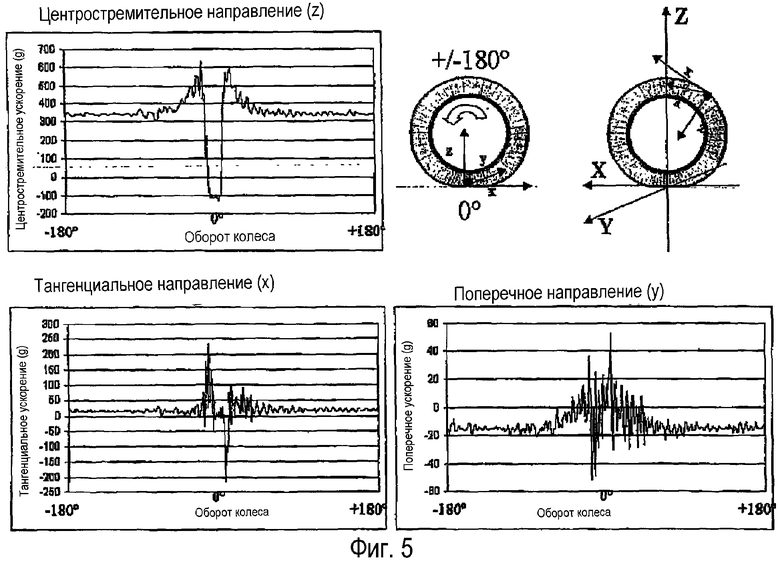
На фиг.5 показаны три экспериментальных диаграммы - центростремительного, тангенциального и поперечного ускорений, соответственно для шины размера 205/55/R16, катящейся со скоростью 80 км/ч по барабану диаметром 1,7 м, измеренных датчиком (фиг.1). Локальная система отсчета, обозначенная буквами x, y, z, показана в правом верхнем углу на фиг.5.
На фиг.6 показана другая диаграмма центростремительного ускорения шины при отличающихся скоростях и под одинаковой нагрузкой. Показано, что кривые при разных скоростях имеют одинаковую форму, но разную амплитуду, в частности, в отношении размаха.
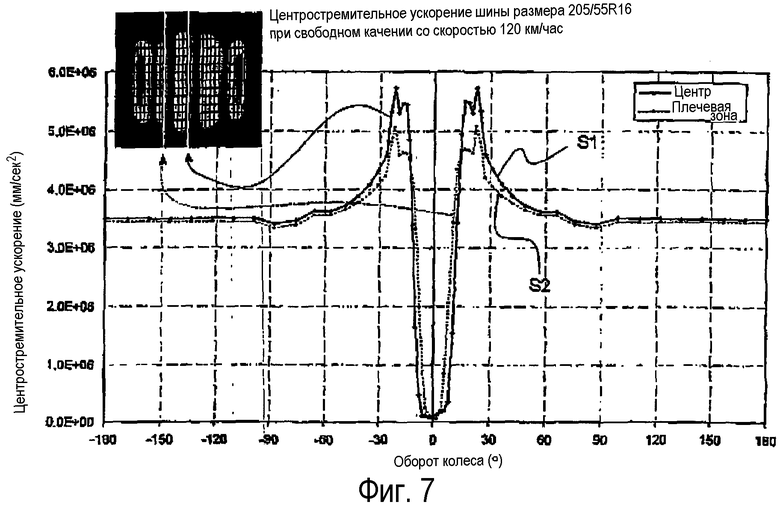
На фиг.7 показана другая диаграмма ускорения той же шины, как и на фиг.5, измеренная датчиками, показанными на фиг.3. В частности, на фиг.7 показаны две кривые. Первая кривая S1 относится к центральному датчику 21' (фиг.3), а вторая кривая S2 относится к датчику 22' в левой плечевой зоне (фиг.3). Условия движения шины следующие: нагрузка 4500 Н, давление в шине 2,2 бар, скорость 120 км/ч.
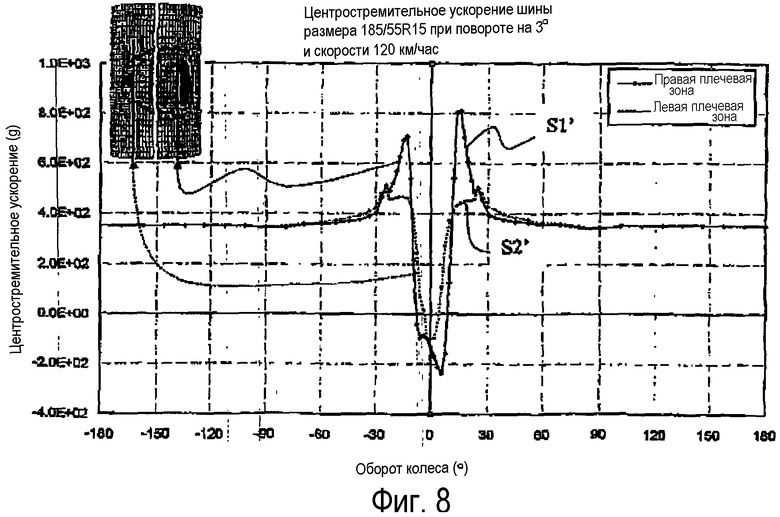
На фиг.8 показана другая диаграмма ускорения той же шины, как и на фиг.5, измеренная датчиками, показанными на фиг.3. В частности, на фиг.8 показаны две кривые. Первая кривая S1' относится к датчику 23' в правой плечевой зоне (фиг.3), а вторая кривая S2' относится к датчику 22' в левой плечевой зоне (фиг.3). Шина совершает поворот налево под углом 3°, при этом другие условия (скорость и нагрузка) такие же, как на фиг.7.
Было отмечено, что датчик 23' (в правой плечевой зоне) на участке пятна контакта шины с опорной поверхностью измеряет ускорение, которое превышает ускорение, измеренное датчиком 22' в левой плечевой зоне. Это происходит вследствие деформации шины при повороте. Благодаря текущему контролю разности между ускорениями, измеренными двумя датчиками, система согласно изобретению способна выявлять критическое состояние при выполнении поворота. Например, критическое состояние может быть выявлено при сравнении разности ускорений с заданным пороговым значением или при сравнении (по точкам) кривой, отслеженной датчиком в плечевой зоне, с опорной кривой, хранящейся в одном из запоминающих устройств.
Согласно изобретению заданные опорные кривые могут храниться в энергозависимом запоминающем устройстве 7а или в постоянном запоминающем устройстве 7b блока 7 обработки временно или постоянно.
Опорные кривые могут быть заданы в ходе настройки системы и могут формироваться каждым из датчиков системы.
Например, базовые опорные кривые, которые представляют собой при одном обороте шины циклическое изменение ускорения заданных точек шины, могут храниться в запоминающих устройствах 7а или 7b. Кроме того, в обоих запоминающих устройствах 7а и 7b может храниться более одной опорной кривой.
Принимающее устройство 6 принимает сигналы, выдаваемые датчиками при движении шины, и посылает их в блок 7 обработки, который запрограммирован для их обработки. Указанные сигналы соответствуют кривым амплитуды сигналов с заданным временным интервалом.
Каждая циклическая кривая центростремительного, или тангенциального, или поперечного ускорения сравнивается блоком 7 обработки с хранящимися базовыми опорными кривыми. В результате сравнений получают информацию о мгновенном поведении шины и/или о мгновенном сцеплении между шиной и дорогой.
Ниже приведен пример сравнения базовой опорной кривой и отслеженной циклической кривой.
Осуществляют полное сравнение двух кривых по точкам на протяжении всего оборота шины, или
сравнение некоторых характеристических пиков одной опорной кривой с соответствующими характеристическими пиками отслеженной циклической кривой, или
сравнение всей площади под одной опорной кривой с соответствующей всей площадью под одной соответствующей отслеженной циклической кривой, или
сравнение временной части площади под одной опорной кривой с соответствующей временной частью площади под одной соответствующей отслеженной циклической кривой, или
сравнение заданного количества отслеженных циклических кривых с опорной кривой для получения временной диаграммы для контролируемых точек шины.
Другая информация может быть получена при сравнении сигналов, выдаваемых датчиками, соединенными с разными шинами транспортного средства. Например, для текущего контроля торможения транспортного средства можно осуществлять сравнение между сигналом, полученным от передних шин, и сигналами, полученными от датчиков задних шин транспортного средства. Другой пример сравнения между сигналами, полученными от датчиков, расположенных в разных шинах транспортного средства, может относиться к условиям поворота, когда разность между сигналами, получаемыми от шины на одной стороне транспортного средства, можно сравнивать с сигналами, получаемыми от шины на другой стороне транспортного средства.
Кроме того, согласно настоящему изобретению, с одной шиной может быть соединено более одного датчика. В этом случае может быть получено много сигналов сравнений, принятых от двух разных датчиков одной шины (то есть в указанных выше условиях выполнения поворота).
Предпочтительно, базовые опорные кривые получают при движении автомобиля по дороге в ходе каждого оборота шины. Базовые опорные кривые (или значения характеристических точек) сохраняют временно для сравнения с текущими циклическими рабочими кривыми, получаемыми в ходе по меньшей мере следующего оборота указанной шины. Например, циклическую рабочую кривую, полученную в ходе оборота шины, сравнивают с базовой опорной кривой, полученной в ходе предшествующего оборота шины при i-м предшествующем обороте шины.
В альтернативном варианте кривые (опорные кривые и циклические кривые) можно сохранять в запоминающем устройстве в каждом датчике. В таком случае блок обработки находится в каждом датчике, и указанная выше операция сравнения сигнала ускорения осуществляется в каждом датчике.
Для исключения случайных ошибок при генерировании или передаче сигнала датчика, предпочтительно, можно также обрабатывать в блоке 7 обработки заданные пары или тройки ускорений заданных точек, выдаваемых двумя или более датчиками, соединенными с двумя или более заданными точками шины.
Информация, полученная при выполнении указанных сравнений, может впоследствии использоваться при настройке механизмов автомобиля, например, при регулировании тормозной системы (поведения в продольном направлении и/или в поперечном направлении) или активной подвески или для получения информации, относящейся к состоянию шины (износ, доступный коэффициент сцепления и т.д.) и подобных механизмов.
Предпочтительно, ускорения контролируемых точек могут быть объединены с другой информацией о транспортном средстве, например, о скорости транспортного средства и/или давлении в шине. Другая информация может быть получена при помощи других датчиков.
При изучении диаграмм на фиг.5-8 было обнаружено, что при полном обороте шины существуют части кривых, которые показывают более существенное значение, чем другие части этих кривых. Например, кривые показывают существенные значения вблизи (перед и после) места вхождения отслеживаемой точки в район физического контакта между шиной и дорогой (фиг.6).
Это означает, что данные об ускорениях, полученные от датчика, расположенного в указанной точке шины, могут давать важную информацию, относящуюся к поведению при вхождении в контакт с дорогой и при выходе из этого контакта, не только когда эта точка примыкает к участку контакта. Существуют другие участки, в которых сигналы, полученные от датчиков, имеют критические значения, например, на противоположной стороне от пятна контакта.
Фактически можно обнаруживать основные изменения в течение срока службы шины (например, износ или структурные изменения) также посредством сравнения двух разных кривых, создаваемых сигналами датчика в этом районе в разные периоды времени (например, ежемесячно).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ШИНЫ ПРИ ДВИЖЕНИИ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2317219C2 |
| ШИНА, СОДЕРЖАЩАЯ УСТРОЙСТВО МОНИТОРИНГА | 2019 |
|
RU2762050C1 |
| ШИНА ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2018 |
|
RU2766039C2 |
| ПНЕВМАТИЧЕСКАЯ ШИНА С АСИММЕТРИЧНЫМ ПРОФИЛЕМ ПРОТЕКТОРА | 2005 |
|
RU2379200C1 |
| ПНЕВМАТИЧЕСКАЯ ШИНА | 2008 |
|
RU2472630C1 |
| ШИНА ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2018 |
|
RU2776721C2 |
| ШИНА, СОДЕРЖАЩАЯ УСТРОЙСТВО МОНИТОРИНГА | 2019 |
|
RU2773058C1 |
| АВТОМОБИЛЬНАЯ ШИНА | 2017 |
|
RU2750756C2 |
| ШИНА ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2721429C2 |
| ШИНА РАНФЛЕТ | 2019 |
|
RU2745302C1 |
Способ (текущего) контроля мгновенного поведения шины при качении заключается в том, что получают и сохраняют по меньшей мере временно по меньшей мере одну опорную кривую, которая представляет собой профиль ускорения по меньшей мере одной заданной точки шины по меньшей мере в двух направлениях, выбранных из группы, состоящей из центростремительного, тангенциального и поперечного направлений, как функцию положения указанной точки по меньшей мере в одной части оборота шины, непрерывно получают сигналы ускорения в по меньшей мере двух направлениях по меньшей мере одной точки шины по меньшей мере в одной части оборота шины, выводят на основе указанных сигналов по меньшей мере одну циклическую кривую профиля ускорения по меньшей мере одной точки по меньшей мере в части оборота шины, сравнивают по меньшей мере одну циклическую кривую с по меньшей мере одной опорной кривой, и выдают сигнал, зависящий от указанного сравнения, который отображает мгновенное поведение шины. в результате повышается безопасность движения на транспортном средстве. 3 н. и 15 з.п. ф-лы, 8 ил.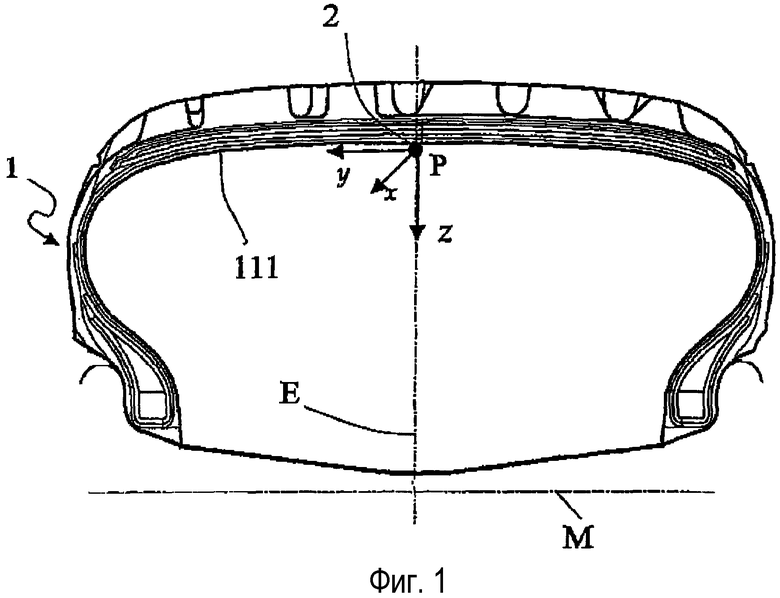
а) получают и сохраняют по меньшей мере временно по меньшей мере одну опорную кривую, которая представляет собой профиль ускорения по меньшей мере одной заданной точки шины по меньшей мере в двух направлениях, выбранных из группы, состоящей из центростремительного, тангенциального и поперечного направлений, как функцию положения указанной точки по меньшей мере в одной части оборота указанной шины;
b) непрерывно получают сигналы ускорения в указанных по меньшей мере двух направлениях по меньшей мере одной точки шины по меньшей мере в одной части оборота указанной шины,
c) выводят по указанным сигналам по меньшей мере одну циклическую кривую профиля ускорения указанной по меньшей мере одной точки по меньшей мере в указанной части оборота шины,
d) сравнивают по меньшей мере одну циклическую кривую с по меньшей мере одной опорной кривой,
е) выдают сигнал, зависящий от указанного сравнения, который отображает мгновенное поведение шины.
по меньшей мере один запоминающий элемент для получения и сохранения по меньшей мере временно по меньшей мере одной опорной кривой, которая представляет собой профиль ускорения по меньшей мере одной заданной точки шины по меньшей мере в двух направлениях, выбранных из группы, состоящей из центростремительного, тангенциального и поперечного направлений, по меньшей мере в одной части оборота шины, по меньшей мере один датчик, соединенный с по меньшей мере одной заданной точкой шины и предназначенный для выдачи в течение периода времени сигналов ускорения заданной точки в указанных направлениях, принимающее устройство для непрерывного приема указанных сигналов ускорения по меньшей мере одной точки шины по меньшей мере в части оборота шины, блок обработки, содержащий программу для вычисления на основе сигналов ускорения по меньшей мере одной циклической кривой ускорения по меньшей мере одной точки в указанных направлениях по меньшей мере в части оборота шины, причем блок обработки обеспечивает непрерывное сравнение по меньшей мере одной из циклических кривых ускорения с по меньшей мере одной хранящейся в памяти опорной кривой, при этом блок обработки дополнительно обеспечивает формирование сигнала, соответствующего указанному сравнению, который отображает мгновенное поведение шины.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для гранулирования термопластичных полимерных материалов | 1980 |
|
SU887211A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 6204758 B1, 20.03.2001. | |||

