Предлагаемое устройство относится к устройствам для измерения для измерения угловой скорости и может использоваться в многоканальных микромеханических системах.
В настоящее время разработаны и широко используются микромеханические гироскопы (ММГ) вибрационного типа. Они включают в себя подвижную массу (ПМ), систему измерения перемещений ПМ по двум осям, систему возбуждения колебаний на резонансной частоте подвеса (Fрез) по одной оси, которые иногда называют первичными. При действии кориолисового ускорения по другой оси (ортогональной к первой) возникают колебания ПМ, называемые вторичными [Распопов В.Я. Микромеханические приборы, Тул. Гос. Университет. Тула, 2002 г., 392 стр]. По осям движения ПМ располагают неподвижные электроды (или статоры). Эти статоры с проводящей ПМ образуют конденсаторы, емкости которых зависят от положения ПМ.
Известны микромеханические гироскопы с различными схемами измерения перемещения ПМ (одной или нескольких) или ротора, построенных на основе преобразователей емкость - напряжение. Один из примеров реализации преобразователя емкость - напряжение приведен в книге Распопова на рис.6.31.
В гироскопе ADXRS150 фирмы Analog Devices на ПМ подается постоянное напряжение, а статора оси первичных колебаний подключены ко входам усилителя тока, статора оси вторичных колебаний подключены ко входам усилителя заряда [J.A.Geen et al. Single-chip surface - micromachined Integrated Gyroscope with 50/hour root Allan Variance IEEE Journal of Solid-State Circuits, v.37, №12, December 2002, pp.l860-1868, fig.2].
В гироскопе, описанном в патенте США №5672949, используется по одному зарядовому усилителю, каждый из которых подключен к статорам, расположенным по разным осям, при этом между ПМ и статорами действует постоянное напряжение.
Варианты построения преобразователей емкость - напряжение приведены в патенте США №6253612, fig.3. Эти преобразователи могут быть построены с напряжением возбуждения постоянного или переменного (частоты f) тока, на усилителе с одним входом, усилителях с двумя входами или двух усилителях. Отметим здесь, что схемы с возбуждением на постоянном токе проще, однако имеют значительно меньший коэффициент преобразования емкости в напряжение, чем схемы с возбуждением на переменном токе. Он меньше в f/Fрез (f - частота напряжения возбуждения, Fрез - резонансная частота подвеса ПМ) раз. При типичных значениях Fрез=10 кГц и f=0,1-1 МГц получаем различие на 1-2 порядка. Однако и схемы с возбуждением на переменном напряжении имеют значительный недостаток, если используются два усилителя в одном канале. В этом случае требование к стабильности коэффициента усиления и вносимому фазовому сдвигу значительно выше, чем для схем, в которых электроды подключены к одному (как правило, инвертирующему) входу усилителя (Патент США №6253612, fig.3b). Пример электронной части микромеханического гироскопа со схемами преобразования, выполненными на одном инвертирующем усилителе, приведен в патенте США №6253612, fig.8. Здесь к электродам каждого канала подключен инвертирующий вход дифференциального усилителя, охваченного отрицательной обратной связью по выходному напряжению. При таком включении дифференциального усилителя вносимые им фазовый сдвиг, его нестабильность могут влиять только на коэффициент передачи преобразователя емкость - напряжение, но не вносят смещение нуля. Допустимой оказывается нестабильность фазового сдвига на уровне 0,5°, при которой нестабильность коэффициента передачи преобразователя емкость - напряжение не превосходит 1%. Однако включение двух таких схем в случае наличия гальванической связи между ними недопустимо, т.к. входы двух дифференциальных усилителей окажутся соединенными. Для исключения электрических связей между входами дифференциальных усилителей разных каналов в микромеханическом гироскопе вводятся специально изолирующие канавки, как это показано в патенте США №6626039, fig.9, что конечно усложняет изготовление датчика. Однако это позволяет исключить гальванические связи между разными каналами измерения и управления в гироскопе [Патент США №6626039, fig.13] и применить более точные преобразователи емкость - напряжение.
Можно отметить, что разрешающая способность серийно выпускаемых таких преобразователей очень высокая, например, у микросхемы ХЕ2004 фирмы Xemics (www.xemics.com) эта величина составляет 0.25·10-18 Ф/√(Hz), а для микросхемы MS3110 фирмы MicroSensors (www.microsensors.com) эта величина равна 4·10-18 Ф/√(Hz).
Поэтому целесообразно применение именно этого типа преобразователей в качестве устройства измерения перемещений ПМ в ММГ, однако в описании микросхемы ХЕ2004 есть указание о невозможности ее использования при отсутствии гальванической развязки между входами: - "The first stage is a capacitance-to-voltage converter. It is based on a floating charge amplifier architecture. This allows the IC to operate only with capacitive sensors that have electrically floating electrodes".
За прототип принят микромеханический гироскоп, описанный в патенте США №6253612, который включает в себя емкостные датчики перемещения, образованные подвижным проводящим телом и неподвижными электродами, и преобразователь емкость-напряжение, который включает в себя инвертирующий усилитель и источник возбуждения с противофазными выходами в каждом канале, при этом выходы каждого источника возбуждения соединены с неподвижными электродами соответствующего канала.
Недостатком прототипа является сложность технологии изготовления и конструкции, т.к. возможность работы двух преобразователей емкость-напряжение, выполненных на инвертирующих операционных усилителях, обеспечена в нем за счет усложнения конструкции ММГ: за счет введения изолирующих канавок.
Задачей изобретения является снижение стоимости, упрощение конструкции и технологии изготовления, увеличение точностных характеристик микромеханического гироскопа вибрационного типа или микромеханических устройств другого типа, для работы которых необходимы двух- или многоканальные устройства измерения перемещений подвижного проводящего тела.
Поставленная задача решается тем, что в двухканальном устройстве измерения перемещений подвижного проводящего тела с емкостными датчиками перемещения, образованными подвижным проводящим телом и неподвижными электродами, используются серийно выпускаемые преобразователи повышенной разрешающей способности типа ХЕ2004 или MS3110. Для возможности их применения предлагается использовать конденсаторы, образованные дополнительными электродами. При этом, частоты напряжений источников возбуждения различаются не менее, чем на удвоенную полосу пропускания каждого из каналов.
По существу в предлагаемом устройстве предложено за счет введения конденсаторов, образованных дополнительными электродами, обеспечить гальваническую развязку измерительных входов преобразователей емкость-напряжение, а за счет применения разных частот источников возбуждения осуществлять частотное разделение сигналов двух каналов.
Заявляемое устройство поясняется чертежами.
На фиг.1 приведен вариант конструкции ММГ.
На фиг.1 приняты следующие обозначения:
1 - Подвижная масса (ПМ). В данном варианте конструкции - ротор
2 - Основание.
3 - Группа электродов, расположенных в плоскости вторичных колебаний
4 - Группа электродов, расположенных в плоскости первичных колебаний
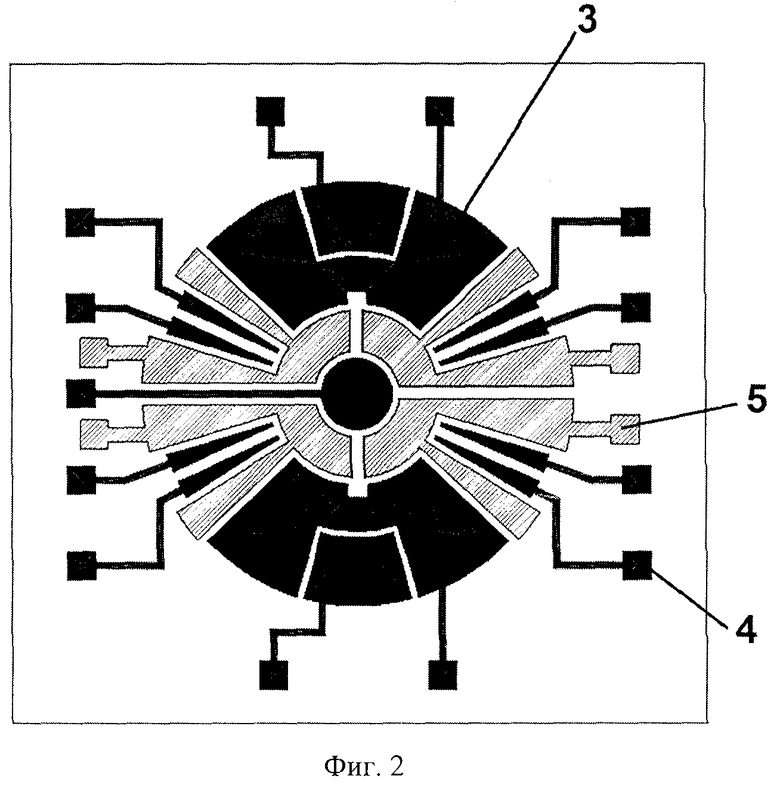
На фиг.2 приведен вариант электродной структуры с дополнительными электродами.
На фиг.2 приняты следующие обозначения:
3 - Электроды, расположенные в плоскости вторичных колебаний;
4 - Электроды, расположенные в плоскости первичных колебаний;
5 - Дополнительные электроды, расположенные ортогонально оси; чувствительности гироскопа.
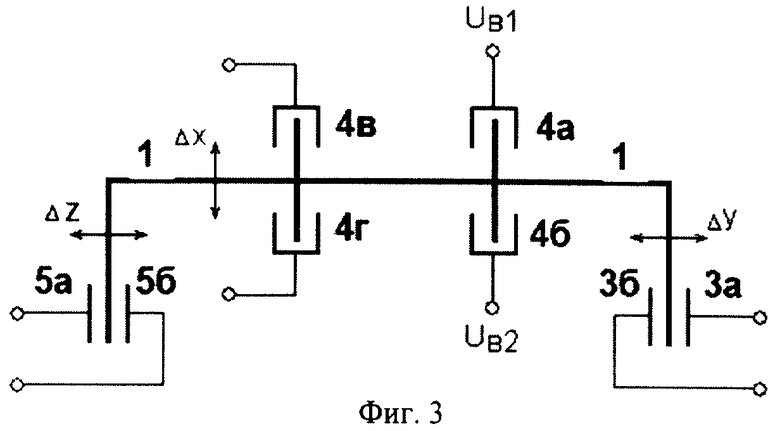
На фиг.3 приведена эквивалентная электрическая схема электродной структуры ММГ.
На фиг.3 приняты следующие обозначения:
1 - Подвижная масса, которая показана в виде проводника электрического тока.
3а, 3б - Электроды 3, расположенные в плоскости вторичных колебаний.
4а, 4б - Электроды 4, образованные парой рядом расположенных статоров в плоскости первичных колебаний.
4в, 4г - Электроды 4, образованные другой парой рядом расположенных статоров.
5а, 5б - Дополнительные электроды 5, расположенные ортогонально оси чувствительности гироскопа.
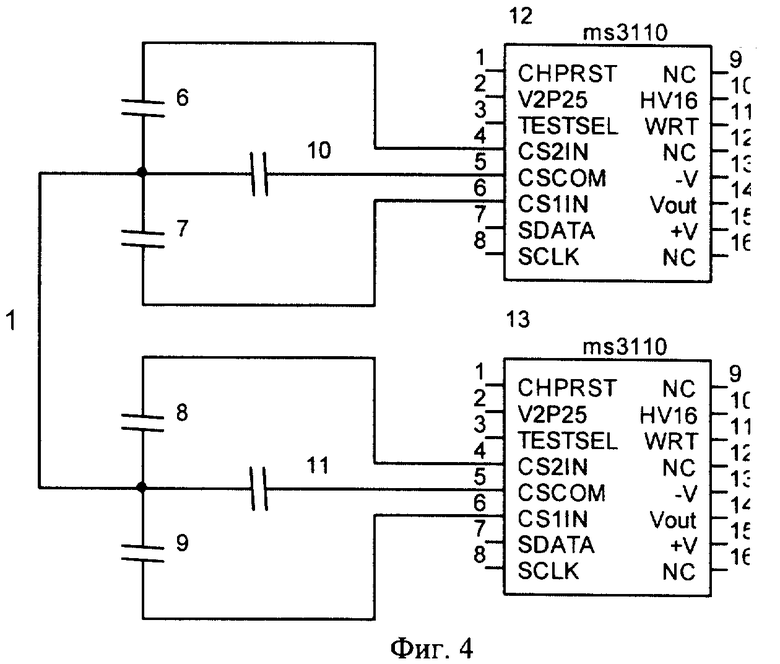
На фиг.4 показана схема подключения ММГ к интегральными микросхемам (ИС) преобразователям емкость-напряжение.
На фиг.4 приняты следующие обозначения:
1 - Подвижная масса 1, которая показана в виде проводника электрического тока;
6 - Конденсатор, образованный электродом 3а и ПМ 1.
7 - Конденсатор, образованный электродом 3б и ПМ 1.
8 - Конденсатор, образованный электродом 4в и ПМ 1.
9 - Конденсатор, образованный электродом 4г и ПМ 1.
10 - Конденсатор, образованный электродом 5а и ПМ 1.
11 - Конденсатор, образованный электродом 5в и ПМ 1.
12, 13 - ИС преобразователи емкость-напряжение типа MS3110.
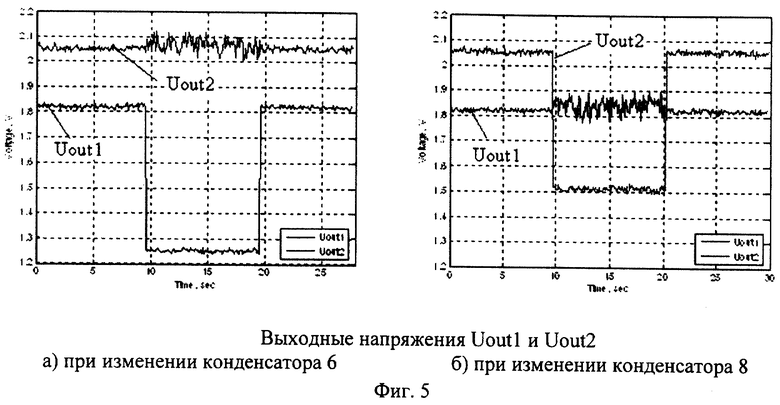
На фиг.5 приведены экспериментально полученные напряжения на выходе двух ИС MS3110, подключенных по схеме, аналогичной на фиг.4, при изменении емкости конденсаторов в одном из каналов.
На фиг.5 приняты следующие обозначения:
Uout1 и Uout2 - напряжения на выходе первой и второй ИС соответственно.
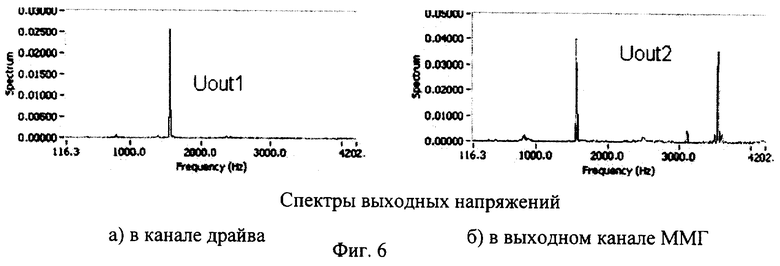
На фиг.6 приведены экспериментально полученные спектры напряжений на выходе двух ИС MS3110, подключенных к ММГ по схеме, аналогичной на фиг.4, при возбуждении колебаний из-за удара по ММГ в канале драйва и выходном канале.
На фиг.6 приняты следующие обозначения:
Uout1 и Uout2 - напряжения на выходе первой и второй ИС соответственно.
Предлагаемое устройство в составе ММГ работает следующим образом.
Микромеханический гироскоп вибрационного типа в простейшем случае представляет собой подвижную массу ПМ 1 (на фиг.1 обозначена номером 1 в виде диска), подвешенную над основанием 2; под диском на основании сформированы электроды 3. ПМ 1 с помощью системы электродов 4 за счет действия электростатических сил начинает колебаться на резонансной частоте подвеса. Колебания происходят в плоскости, параллельной основанию 2. При вращении основания вокруг оси чувствительности гироскопа ПМ 1 совершает колебательные движения вокруг оси, ортогональной к первым двум осям, приближаясь и удаляясь от электродов 3.
На фиг.3 приведена эквивалентная электрическая схема электродной структуры. Проводящая ПМ 1, показанная на фиг.3 как проводник, вместе с электродами 3а, 3б, 4а-4г, 5а, 5б образует конденсаторы, емкость которых изменяется в зависимости от перемещений ПМ 1 в трех ортогональных направлениях, которые на фиг.3 условно обозначены Δх, Δу и Δz. При подаче переменного напряжения на электроды 4а, 4б ПМ 1 совершает перемещения Δх (колебания), которые могут быть измерены путем измерения изменений емкости конденсаторов, образованных ПМ 1 и электродом 4в или 4г. Аналогично, перемещения Δу могут быть измерены путем измерения изменений емкости конденсаторов, образованных ПМ 1 и электродами 3а, 3б.
Серийно выпускаемые одноканальные преобразователи емкость - напряжение содержат в своем составе синхронный детектор, с помощью которого в них осуществляется преобразование сигнала на несущей в сигнал постоянного тока и подавление высокочастотных сигналов, частота которых отличается от несущей частоты. При значениях емкостей 6-11, равных или близких друг другу, величина тока, поступающего на входы ИС 12, 13, меньше примерно в 6 раз, чем в прототипе, что может привести и к соответствующему уменьшению разрешающей способности преобразователя емкость-напряжение. Однако и в этом случае она остается достаточно высокой.
Подробно принцип работы ИС MS3110 описан в MS3110 DataSheet rev.2, 2001 г., www.microsensors.com.
Из приведенных на фиг.5 графиков видно, что изменение емкости в одном из каналов (конденсатор 6, конденсатор 8) не вызывает изменение постоянной составляющей напряжения в другом канале. Это обусловлено тем, что несущая частота в одной из ИС установлена 120 кГц, а во второй - 100 кГц. Соответственно и синхронное детектирование в каждой из микросхем обеспечивает подавление сигналов, частота которых отличается от установленной несущей. Таким образом, экспериментально показана работоспособность предложенного устройства в статическом режиме.
Из приведенных на фиг.6 графиков, полученных экспериментально, видны спектры сигнала на резонансной частоте драйва (фиг.6а) и две составляющие на резонансной частоте драйва (так называемая квадратурная помеха) и на резонансной частоте подвеса ПМ 1 по выходной координате. Полученные графики подтверждают возможность работы предложенного устройства и в динамическом режиме.
Изобретение относится к приборам, измеряющим угловую скорость, в частности к микромеханическим гироскопам вибрационного типа. Микромеханический гироскоп содержит подвижную массу, систему измерения перемещений подвижной массы, которая включает в себя электроды, расположенные на первой и второй осях перемещения подвижной массы, и интегральные микросхемы, преобразователи "емкость-напряжение", а также пару дополнительных электродов, расположенных в плоскости, параллельной перемещениям по первой оси, при этом вход каждого из преобразователей соединен с одним из сформированных электродов. Техническим результатом является упрощение конструкции и технологии изготовления микромеханического гироскопа вибрационного типа. 5 ил.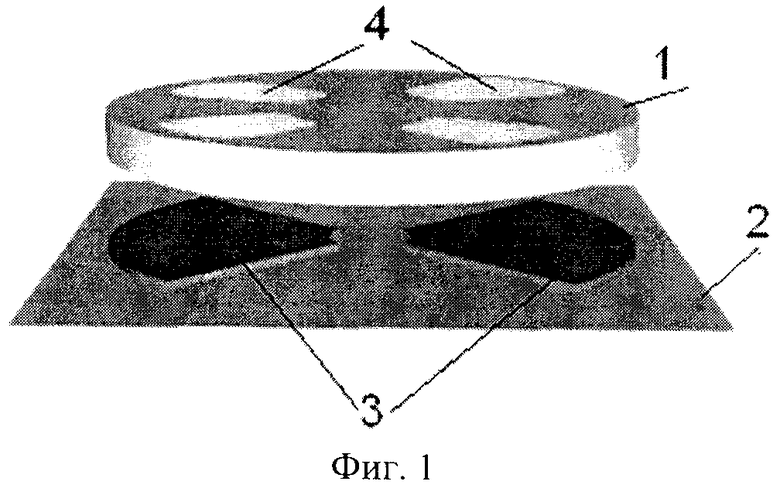
Микромеханический датчик, содержащий подвижную массу, подвешенную над основанием, и систему измерения перемещений подвижной массы, которая включает в себя электроды, расположенные в плоскости вторичных колебаний, сформированные на основании, электроды, образованные одной парой рядом расположенных статоров в плоскости первичных колебаний, и преобразователи "емкость-напряжение", выполненные в виде интегральных микросхем, на входы которых подаются изменения емкостей конденсаторов, образованных указанными электродами и подвижной массой, а также электроды, образованные другой парой рядом расположенных статоров в плоскости первичных колебаний, на которые подается переменное напряжение, отличающийся тем, что в нем сформирована пара дополнительных электродов, расположенных на оси, ортогональной оси чувствительности гироскопа, при этом вход каждого из преобразователей соединен с одним из сформированных электродов, каждый из которых образует конденсатор с подвижной массой.
| US 6626039 B1, 30.09.2003 | |||
| US 6253612 B1, 03.07.2001 | |||
| US 5672949 A, 30.09.1997 | |||
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |

