Изобретение относится к области микромеханики, в частности к микромеханическим гироскопам (ММГ) вибрационного типа.
Известны ММГ, в которых подвижная масса (ИМ) крепится к основанию с помощью многоосного резонансного подвеса. Резонансная частота подвеса по оси первичных колебаний выбирается ниже резонансной частоты подвеса по оси вторичных колебаний. Резонансные частоты подвеса по остальным осям выбираются больше (в 2-3 и более раз) по сравнению с упомянутыми выше резонансными частотами. Это делается за счет увеличения жесткости подвесов по этим осям для того, чтобы внешние воздействия по этим осям не приводили к изменению положения подвижной массы и снижению точности ММГ. С повышением жесткости подвеса уменьшается амплитуда перемещений ПМ под действием вибраций и ударов. Однако и кориолисовы ускорения в этом случае вызывают меньшее перемещение ПМ. Поэтому чем выше жесткость подвеса, тем хуже разрешающая способность гироскопа, что заставляет при выборе конструкции находить компромисс.
Одной из возможностей уменьшения перемещения подвижной массы является использование компенсационного режима, при котором в контуре, образованном датчиками перемещения ПМ, резонансным подвесом и датчиками силы (момента), вводится глубокая обратная связь (т.е. сигнал датчиками перемещения по определенной оси подвеса ПМ заводится через усилитель с большим коэффициентом передачи на датчик силы, расположенный по этой же оси).
Так строятся ММГ компенсационного типа, в которых глубокая обратная связь вводится в контуре (канале) вторичных колебаний. Для повышения контурного усиления на рабочей частоте (частоте первичных колебаний) резонансную частоту контура вторичных колебаний подстраивают под частоту первичных колебаний и в контур вторичных колебаний вводят цифровой резонансный контур, как это описано в работе (V.P.Petkov and B.Boser, “A fourth-order ΣΔ-interface for micromachined inertial sensors,” IEEE J. Solid-State Circuits, vol. 40, no.8, pp.1602-1609, Aug. 2005).
При действии линейных вибраций вдоль оси первичных колебаний (обозначим ее Z) на ПМ действуют ускорения вдоль этой оси, которое может вызывать перемещения ПМ вдоль нее и угловые колебания ПМ вокруг осей, ортогональных к оси Z. Угловые колебания ПМ вокруг этих осей обусловлены существованием дебаланса масс. В одноосном ММГ компенсационного типа угловые колебания вокруг оси вторичных колебаний (например, оси Y, как это показано на фиг.1 и описано в работе В.Г.Пешехонов и др. “Результаты испытаний микромеханического гироскопа RR-типа” XVII Санкт Петербургская международная конференция по интегрированным навигационным системам." г.С-Петербург, 31.05-02.06.2010 г. стр.9-17) подавляются за счет обратной связи. Жесткость подвеса вокруг оси X (см. рис.1 данной заявки) в одноосном подвесе выбирается выше в несколько раз, чем вокруг оси Y. Поэтому вибрации будут оказывать существенное влияние на работу ММГ в том случае, когда в спектре вибраций содержатся высшие гармоники, частота которых близка к резонансной частоте подвеса вокруг оси X или вдоль оси Z.
Описанный в этой работе ММГ является аналогом предложенного устройства. В нем две пары электродов (рис.6, 11, 12) используются как силовые и измерительные, пример построения емкостного датчика перемещения, который образован измерительными электродами и дифференциальным усилителем, выполненным на основе трех операционных усилителей, показан на рис.12.
В двухосном ММГ компенсационного типа угловые колебания вокруг осей вторичных колебаний подавляются за счет отрицательной обратной связи (см. патентную заявку США №US 2009056443 A1). В этой заявке предложено (см. fig.5b) подавлять и линейные перемещения ПМ вдоль оси Z за счет формирования компенсационного режима и по оси Z. В этом случае ММГ можно использовать и как акселерометр, однако, формирование напряжений на электродах для компенсации перемещений по оси Z может существенно ограничить диапазон измеряемых угловых скоростей особенно в тех случаях, когда ММГ работает при значительных вибрациях и ударах, т.к. напряжения, компенсирующие линейные ускорения, поступают на те же электроды, что используются для формирования моментов, компенсирующих кориолисовы ускорения. В случае относительно больших уровней вибраций и ударов точность ММГ может значительно снизиться или он может прекратить нормально функционировать из-за возмущений, вносимых каналом компенсации по оси Z, на работу каналов X, Y. Это является недостатком ММГ по патентной заявке США № 2009056443 A1, который принят за прототип. В этом гироскопе по каждой оси вторичных колебаний расположены две пары электродов (например 23, 24 на фиг.4 описания прототипа), с помощью одной из которых сформирован емкостной датчик перемещения ПМ по оси вторичных колебаний, а вторая пара электродов может использоваться для формирования сил, компенсирующих кориолисово ускорение, действующее на ПМ. Поэтому электроды первой пары могут быть названы измерительными, а второй - силовыми. Можно отметить, что одни и те же электроды могут выполнять функции и измерительных, и силовых, но в этом случае формируемые и измеряемые с помощью этих электродов сигналы должны быть разделены, например, по частоте или во времени. Прототип также содержит устройство возбуждения первичных колебаний (блок 35 на фиг.5-a) и звено отрицательной обратной связи (блок 66 на фиг.5-b).
Задачей изобретения является повышение точности ММГ при его работе в условиях повышенных вибраций и ударов.
Поставленная задача решается тем, что в ММГ, включающем ПМ, две пары электродов по оси вторичных колебаний, одна из которых является измерительной, другая - силовой, емкостной датчик перемещения подвижного механического элемента по оси вторичных колебаний, образованный измерительными электродами и дифференциальным усилителем, устройство возбуждения первичных колебаний, звено отрицательной обратной связи, включенное между парой измерительных и парой силовых электродов, введены последовательно включенные устройство измерения зазора между измерительными электродами и подвижным механическим элементом и звено коррекции частотной характеристики, при этом вход устройства измерения зазора между измерительными электродами и подвижным механическим элементом соединен с парой измерительных электродов, а выход звена коррекции частотной характеристики соединен с парой силовых электродов.
Кроме того, поставленная задача решается тем, что в микромеханическом гироскопе устройство измерения зазора между измерительными электродами и подвижным механическим элементом выполнено в виде двух трансрезистивных усилителей, выходы которых через суммирующий усилитель соединены со входами трансрезистивных усилителей, а звено коррекции частотной характеристики выполнено в виде дифференцирующего звена, выход которого через усилители соединен с силовыми электродами, а вход - с выходом суммирующего усилителя.
По существу, за счет введения звена коррекции частотной характеристики осуществляется снижение добротности подвеса ПМ по оси, ортогональной к электродам канала вторичных колебаний.
По сравнению с прототипом в предложенном устройстве вместо режима компенсации ускорений, действующих на ПМ по оси Z, выполняется демпфирование колебаний ПМ по этой оси.
Заявляемое устройство поясняется чертежами.
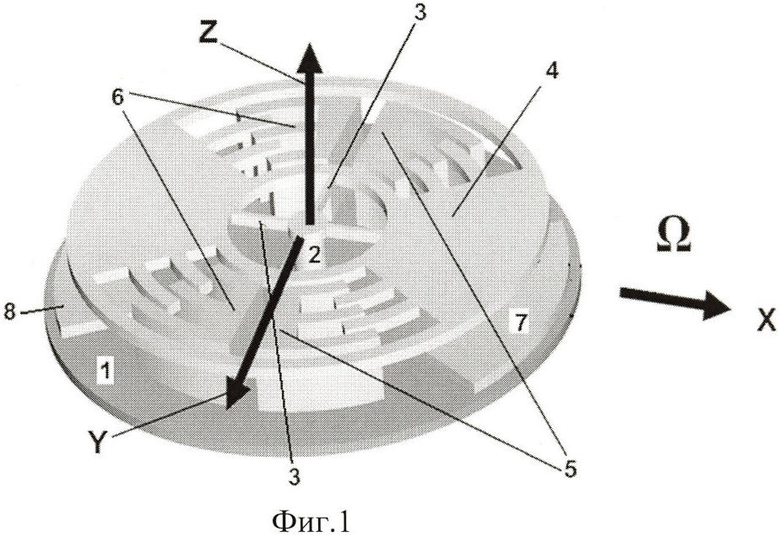
На фиг.1 показан чувствительный элемент ММГ RR-типа.
На фиг.1 приняты следующие обозначения:
1 - основание
2 - опора
3 - торсионы
4 - подвижная масса (ПМ)
5 - статоры датчика перемещения ПМ 4 вокруг оси
6 - статоры датчика момента
7, 8 - электроды.
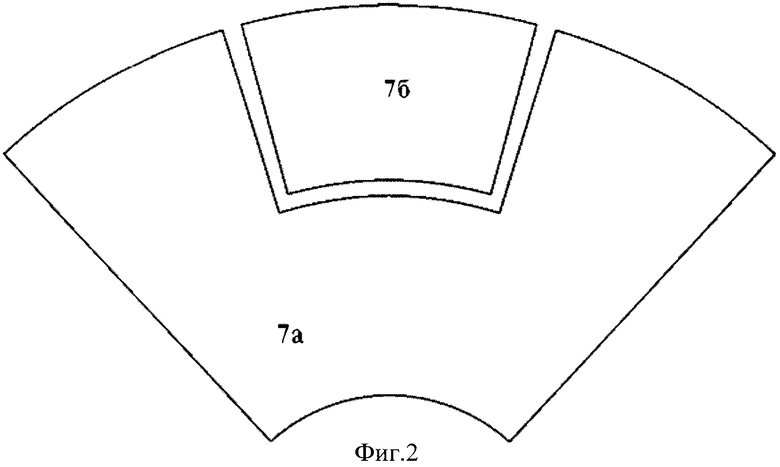
На фиг.2 приведен вид одного из электродов 7 (8).
На фиг.2 приняты следующие обозначения:
7а - измерительный электрод
7б - силовой электрод.
Электрод 8 имеет конфигурацию, как и электрод 7, и включает в себя 8а - измерительный электрод и 8б - силовой электрод, которые не приведены на фиг.2.
На фиг.3 приведен вид блока преобразования сигналов в ММГ.
На фиг.3 приняты следующие обозначения:
4 - ПМ
9, 10 - конденсаторы, образованные ПМ 4 и измерительными электродами 7а, 8а
11, 12 - конденсаторы, образованные ПМ 4 и силовыми электродами 7б, 8б
13, 14 - источники высокочастотного сигнала
15, 16 - операционные усилители
17 - дифференциальный усилитель
18 - демодулятор
19 - звено отрицательной обратной связи
20 - усилитель с парафазным выходом
21, 22 - резисторы
23, 24 - операционные усилители
25 - демодулятор
26 - звено коррекции частотной характеристики
27, 28 - устройства суммирования
29-35 - резисторы
36 - конденсатор
Предлагаемое устройство работает следующим образом.
Приведенная на фиг.1 конструкция состоит из основания 1, опоры 2, закрепленной на основании 1, торсионов 3, ПМ 4. На основании 1 установлены статоры датчика перемещения ПМ 4 вокруг оси Z статоры 6. На основании размещены электроды 7, 8.
Показанный на фиг.1. чувствительный элемент работает следующим образом.
ПМ 4 подвешена к опоре 2 с помощью торсионов 3.
С помощью устройства возбуждения первичных колебаний, которое подсоединяется к статорам 5, 6, создаются периодически изменяющиеся во времени моменты вокруг оси Z, которые вызывают колебания ПМ 4 вокруг этой оси. Под действием ускорения Кориолиса при повороте основания вокруг оси X, ПМ 4 начинает колебаться вокруг оси Y и амплитуда этих колебаний измеряется с помощью пары электродов 7а, 8а.
Показанные на фиг.3 элементы соединены следующим образом.
Конденсаторы 9-11 образованы ПМ 4 и соответственно измерительными (7а, 8а) и силовыми электродами (7б, 8б). Общей точкой этих конденсаторов на фиг.3 является проводящая ПМ 4, к которой подключен источник напряжения 13. Источник напряжения 14 имеет сдвиг фазы по отношению к сигналу с выхода источника 13, равный 90°. Операционные усилители 15, 16 подключены входами к конденсаторам 9, 10, а выходами ко входу дифференциального усилителя 17, выход которого через демодулятор 18, звено отрицательной обратной связи 19 и усилитель с парафазным выходом 20 соединено с конденсаторами 11, 12.
Резисторы 21, 22 включены между выходом и входом соответственно операционных усилителей 15, 16.
Операционные усилители 23, 24 включены последовательно, выход усилителя 24 подключен к одному из входов демодулятора 25, ко второму входу которого подключен источник напряжения 14. Выход демодулятора 25 через звено коррекции частотной характеристики 26 и усилитель с парафазным выходом 20 соединен с конденсаторами 11, 12. Выходы элементов 19, 26 соединены со входами усилителя 20 через устройства суммирования 27, 28.
Резисторы 29, 30 включены между выходами усилителей 15, 16 и входом усилителя 23, резистор 31 и конденсатор 38 включены между выходом усилителя 23 и его входом, резистор 32 включен между входом усилителя 24 и выходом усилителя 23, резисторы 33-35 подключены одним выводом с выходу усилителя 24, а другим выводом соответственно ко входам усилителей 24, 15 и 16.
Предложенное устройство работает следующим образом.
При колебаниях ПМ 4 под действием кориолисова ускорения вокруг оси Y изменяются емкости конденсаторов 9, 10, причем они изменяются в противоположных направлениях. Токи, протекающие через них от источника напряжения 13, изменяются пропорционально изменениям соответствующих емкостей. Трансрезистивные усилители на операционных усилителях 15, 16 преобразуют входные токи в напряжения, разность которых выделяется дифференциальным усилителем 17, выходной сигнал которого демодулируется элементом 18 и через элемент 19 и усилитель 20 поступает на силовые электроды, которые вместе с ПМ 4 образуют конденсаторы 11, 12. Создаваемый этими электродами момент компенсирует момент от кориолисова ускорения, ПМ 4 остается в начальном положении, а поскольку момент, создаваемый с помощью электродов, пропорционален величине U (U - напряжение между ПМ 4 и силовым электродом), то разность квадратов напряжений на выходах усилителя 22 и будет пропорциональна измеряемой скорости. С учетом того, что на ПМ 4, как правило, действует еще и квадратурный момент, который так же компенсируется, из получаемой разности напряжений необходимо выделить составляющую, синфазную с кориолисовым моментом, действующим на ПМ 4.
Последнее достигается за счет синхронного детектирования, для чего в качестве опорного сигнала выбирается сигнал с выхода датчика перемещения ПМ 4, сформированного с помощью электродов 5. Фаза этого сигнала сдвигается на угол 90°. Эта часть ММГ не показана на фиг.3, однако она широко известна и описана в технической литературе и в аналогах предложенного устройства.
В схеме на фиг.3 сигнал на выходе усилителя 24 пропорционален сумме емкостей конденсаторов 9, 10. Эта зависимость соблюдается тем точнее, чем выше усиление каскадов на усилителях 23, 24. В свою очередь, сумма емкостей конденсаторов 9, 10 пропорциональна зазору между ПМ 4 и электродами 7, 8. Таким образом, каскады на усилителях 15, 16, 23, 24 с конденсаторами 9, 10 образуют по существу устройство измерения зазора между ПМ 4 и электродами или устройство измерения зазора по оси Z. При действии ударов или вибраций по оси Z ПМ 4 может колебаться вдоль этой оси с достаточно большой амплитудой, т.к. добротность подвеса и по этой оси может находиться на уровне 103-104. Отметим, что емкость конденсатора 36 (C36) выбирается такой, что на частоте источника 13 (f13) его сопротивление (2πf13C36)-1 было бы много меньше сопротивления резистора 31.
В предложенном устройстве сигнал с выхода усилителя 24, которой представляет собой сигнал на несущей частоте источника 13, демодулируется элементом 25 и через звено коррекции частотной характеристики 26 поступает на электроды 7б, 8б.
Если звено 26 имеет в частотной области вблизи резонансной частоты подвеса по оси Z участок дифференцирования (т.е. ЛАХ звена имеет в этой области наклон 20 дБ/декаду), то при достаточном контурном усилении можно достичь снижения эквивалентной добротности подвеса по оси Z на 2-3 порядка и соответственно снизить время переходного процесса и амплитуду колебаний. Отметим, что для демпфирования резонансного звена за счет введения в контур отрицательной обратной связи звена коррекции частотной характеристики контурное усиление может быть ниже на порядок и более, чем при реализации компенсационного режима работы. Для демпфирования с уменьшением добротности до 50 контурное усиление равно 0,02, а в случае компенсационного режима оно выше 1 и, как правило, больше 10. Соответственно и уровни сигнала на электродах при реализации этих режимов будут отличаться более, чем на порядок.
Уменьшение добротности может быть достигнуто, например, за счет повышения коэффициента передачи звена 26.
Передаточная функция звена 26 W26(p) может иметь вид:
 , где T1>T2 или
, где T1>T2 или  или Tp
или Tp
Применительно к аналогу, описанному в работе Пешехонова В.Г., частоты, упоминаемые в описании, имеют следующие величины: частота первичных колебаний ПМ 4 - 3 кГц, частота резонансного подвеса по оси Z - около 10 кГц, частота источников 13, 14 - 200-250 кГц.
Таким образом, в предложенном устройстве благодаря демпфированию резонансного подвеса по оси Z, не возникают колебания с большой амплитудой, которые могли бы снизить точность ММГ, при этом величины напряжений, формируемых на электродах для демпфирования колебаний, оказываются на порядок и более ниже, чем бы это понабилось для компенсации ускорений по оси Z, как это имеет место в прототипе.
Изобретение относится к области микромеханики, в частности к микромеханическим гироскопам вибрационного типа. В гироскопе сформирован канал демпфирования по оси продольного перемещения подвижной массы гироскопа за счет введения в гироскоп устройства измерения зазора между измерительными электродами и подвижным механическим элементом и звена коррекции частотной характеристики, что позволяет снизить добротность подвеса по оси продольного перемещения и повысить точность гироскопа при его работе в условиях вибраций и ударов, в которых под их действием может изменяться зазор между подвижной массой и электродами по оси вторичных колебаний. 1 з.п. ф-лы, 3 ил.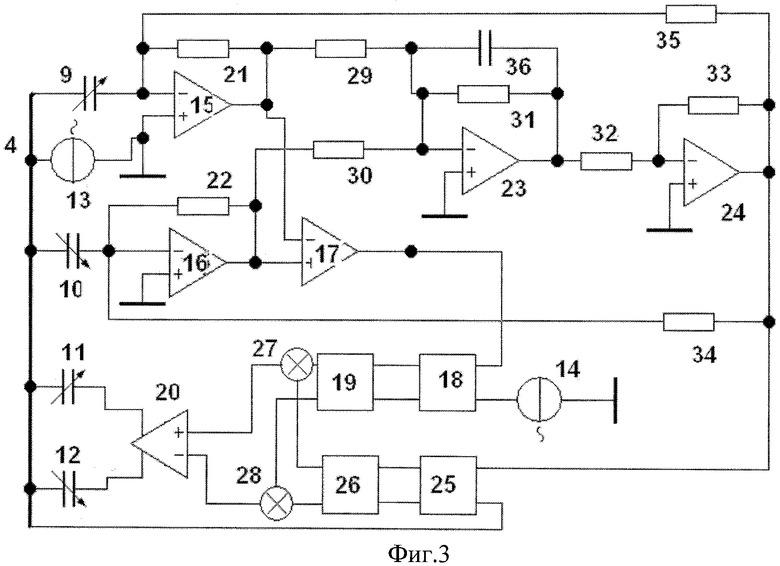
1. Микромеханический гироскоп, включающий в себя подвижный механический элемент, две пары электродов по оси вторичных колебаний, одна из которых является измерительной, другая - силовой, емкостной датчик перемещения подвижного механического элемента по оси вторичных колебаний, образованный измерительными электродами и дифференциальным усилителем, устройство возбуждения первичных колебаний, звено отрицательной обратной связи, включенное между парой измерительных и парой силовых электродов, отличающийся тем, что в него введены последовательно включенные устройство измерения зазора между измерительными электродами и подвижным механическим элементом и звено коррекции частотной характеристики, при этом вход устройства измерения зазора между измерительными электродами и подвижным механическим элементом соединен с парой измерительных электродов, а выход звена коррекции частотной характеристики соединен с парой силовых электродов.
2. Микромеханический гироскоп по п.1, отличающийся тем, что устройство измерения зазора между измерительными электродами и подвижным механическим элементом выполнено в виде двух трансрезистивных усилителей, выходы которых через суммирующий усилитель, соединены со входами трансрезистивных усилителей, а звено коррекции частотной характеристики выполнено в виде дифференцирующего звена, выход которого через усилители соединен с силовыми электродами, а вход - с выходом суммирующего усилителя.
| Колосоуборка | 1923 |
|
SU2009A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ПЕРВИЧНЫХ КОЛЕБАНИЙ | 2005 |
|
RU2289789C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ДАННОГО СПОСОБА | 2005 |
|
RU2296301C1 |
| US 6626039 B1, 30.09.2003 | |||
| СПОСОБ ПОЛУЧЕНИЯ САХАРНЫХ ВАФЕЛЬ | 2010 |
|
RU2424706C1 |

