Изобретение относится к диагностике психофизиологического состояния человека в процессе профессиональной деятельности и может быть использовано в системах автоматического контроля состояния водителей транспортных средств.
Описано большое количество изобретений, касающихся противодействия попаданию за руль транспортного средства как изначально неработоспособного водителя, так и водителя, который в процессе вождения теряет работоспособность. Так, известно использование газоанализаторов для определения паров алкоголя в процессе дыхания водителя, препятствующих запуску двигателя (ЕР 1024746 A1, Smart Start Inc., A 61 B 5/097,... B 60 K 28/06, 09.08.2000) [1], использование систем распознавания речи водителя (RU 2148505, ЗАО «НЕЙРОКОМ», B 60 K 28/06, 10.05.2000) [2] для этих же целей. Известны также системы, использующие в качестве критерия работоспособности анализ во времени степени сжатия водителем рулевого колеса (WO 00/55000 A1, Fahrertraining..., B 60 K 28/06, 21.09.2000) [3], в предельном случае диагностирующие смерть водителя (WO 00/18012, Gustav Magenwirth, H 03 K 17/975, B 60 K 28/04, 30.03.2000) [4].
Процесс перехода в дремотное состояние в процессе движения предлагается фиксировать по частоте перемещения века глаз (US 5469143, Cooper, G 08 B 21/00, 340/575, 21.11.1995; WO 00/24309 A1, Renault, A 61 B 3/113, 04.05.2000) [5]. Другим направлением контроля за состоянием водителя в процессе движения является фиксация его физиологических параметров - электроэнцефалограмм, электромиограмм и электроокулограмм, а также их совместный анализ (WO 00/44580 A1, Compumedics Sleep. PTY. Ltd, B 60 K 28/02, /06, 03.08.2000) [6]. Контроль функционального состояния может быть эффективно использован для поддержания работоспособности, например, в условиях монотонии, когда оператор теряет бдительность (см. RU 2111134 С1, НЕЙРОКОМ, В 60 К 28/06, 1998) [7].
Одним из наиболее информативных критериев перехода в состояние потери работоспособности водителя является изменение кожно-гальванической реакции (RU 2107460 С1, НЕЙРОКОМ, А 61 В 5/05, 5/103, 5/18, 27.03.1998; US 6167299, Galchenkov et al, NEUROCOM, 600/547, 26.12.2000 - патенты-аналоги) [8]. Устройство для реализации способа содержит электроды со средствами их крепления, подключенные к входному устройству, средства для подавления импульсных помех, средства для выделения сигнала в полосе фазической составляющей электродермальной активности, средства для детектирования импульсов фазической составляющей, блок регистрации. Средства выделения сигнала в полосе фазической составляющей, средства для подавления импульсных помех и средства для детектирования импульсов фазической составляющей выполнены в виде последовательно подключенных к входному устройству фильтра нижних частот, блока преобразования входного сигнала в первую и вторую производные по времени и блока анализа формы импульсов, при этом вход последнего подключен к входу блока регистрации. Однако в [8] не затрагиваются технические аспекты реализации устройства на транспорте, обеспечение устойчивой телеметрии и поддержание бодрствования без создания дополнительных неудобств водителю, что и является задачей патентуемого изобретения.
Наиболее близким по совокупности признаков и достигаемому результату является телеметрическая система контроля бодрствования водителя транспортного средства (RU 2200095, НЕЙРОКОМ, 09.08.2001) [9]. Входное устройство выполнено в виде телеметрического датчика с возможностью размещения и крепления на запястье или на пальце водителя. Связь телеметрического датчика и блока приема осуществляется по радиоканалу. Входное устройство содержит последовательно соединенные логарифмический преобразователь, аналого-цифровой преобразователь, формирователь кодовых посылок и передатчик. Блок приема сигнала выполнен двухканальным, при этом каждый из каналов образован последовательно соединенными приемной антенной, усилителем высокой частоты, детектором, коррелятором.
Эта система использует один телеметрический датчик, размещаемый только на запястье или на пальце водителя, и реализует концепцию равнозначности указанных областей для целей достоверной регистрации кожно-гальванической реакции. Однако в результате обширных экспериментов установлено, что у некоторых людей сигнал на запястье самопроизвольно пропадает при их вполне работоспособном психофизиологическом состоянии, что вызывает в системе ложные тревоги. Но при этом на пальцах сигнал кожно-гальванической реакции сохраняется. У других людей наблюдается обратная ситуация: сохраняется сигнал на запястье при исчезновении его на пальцах. Патентуемое изобретение направлено на устранение неоднозначности в характере получаемой информации о состоянии бодрствования человека.
Технический результат изобретения состоит в повышении достоверности контроля бодрствования для различных физиологических типов водителей. Дополнительный технический результат - повышение надежности устройства за счет резервирования телеметрических датчиков.
Технический результат достигается тем, что телеметрическая система контроля бодрствования водителя транспортного средства содержит связанные по радиоканалу приемник и телеметрический датчик, имеющий электроды для обеспечения электрического контакта с кожей водителя, подключенные к аналого-цифровому преобразователю, выход которого подключен к передатчику с антенной, блок обработки сигналов и управления, связанный с блоком индикации.
В систему введен второй аналогичный телеметрический датчик, причем один из датчиков выполнен с возможностью установки на запястье, а другой - на пальце руки водителя, передатчики обоих телеметрических датчиков и приемник выполнены с возможностью передачи и приема индивидуальных сигналов от каждого из телеметрических датчиков, а блок обработки сигналов и управления выполнен с возможностью суммирования сигналов от обоих датчиков в режиме реального времени.
Система может характеризоваться тем, что радиоканал связи приемника и телеметрических датчиков выполнен с возможностью двустороннего обмена данными.
Введение второго датчика не сводится к увеличению однотипных признаков, приводящему лишь к усилению технического результата, поскольку реализуется новый принцип - одновременная регистрация сигналов и на запястье и на пальце водителя. Необходимость такой регистрации установлена самим заявителем. Следует отметить, что приемный блок в прототипе [9] реализует другой принцип: он принимает сигналы КГР только либо с запястья, только либо с пальца. Два канала в блоке приема (приемнике) обеспечивают решение другой задачи - устойчивости приема радиосигнала в условиях движения радиопередатчика телеметрического датчика относительно приемной антенны.
Существо изобретения поясняется чертежами, где:
на фиг.1 показана блок-схема патентуемой системы контроля бодрствования водителя; на фиг.2 представлен алгоритм функционирования системы.
Система содержит (фиг.1) телеметрические датчики 10, 12, приемник 20 сигналов телеметрического датчика, контроллер 30 и устройство 40 индикации. Телеметрические датчики 10, 12 предназначены для получения информации об изменении кожного сопротивления водителя, передачи этой информации по радиоканалу. Телеметрические датчики 10, 12 располагаются на запястье и на пальце водителя и могут быть выполнены в виде браслета (или наручных часов) и перстня.
Телеметрические датчики характеризуются идентичной функциональной схемой и различаются только формой корпуса и электродов. Телеметрический датчик 10 имеет электроды 102, 104 для обеспечения электрического контакта с кожей водителя, соединенные с входом аналого-цифрового преобразователя (АЦП) 105, выход которого подключен к входу передатчика 106. Передатчик 106 имеет передающую антенну 108. Питание датчика осуществляется от встроенного сменного автономного элемента (не показан). Датчик 12 соответственно включает электроды 122 и 124, АЦП 125, передатчик 126 с передающей антенной 128.
Приемник 20 с антенной 201 предназначен для приема высокочастотных радиосигналов от телеметрических датчиков 10, 12. Приемник 20, так же как и датчики 10, 12, выполняется таким образом, чтобы обеспечить прием телеметрической информации по радиоканалу с последующим разделением сигналов. Принципы и средства построения таких решений являются известными для специалиста (выбор разных частот передатчиков, различных типов модуляции и т.п. - см., например, http://www.cdma.aaanet.ru/cdma8006.html). Телеметрическая система может быть выполнена в соответствии с международным стандартом - протоколом беспроводной связи IEEE.802.15.4 (т.н. «ZigBee») (http://www.wireless.ru/wireless/1276). Этот протокол предусматривает небольшую дальность действия (около 10 метров) и пропускную способность канала - до 250 кбит/с. Передача на этой скорости ведется в диапазоне 2,4 ГГц. Небольшая мощность и скорость обусловлены малыми энергоресурсами связываемых устройств. Выход приемника 20 связан с контроллером 30.
Контроллер 30 имеет интерфейс 302, связанный с блоком 304 управления и цифровой обработки сигналов. Блок 304 подключен к блоку 306 формирования управляющих воздействий, имеющему ряд соответствующих выходных клемм 308 для подключения к различным системам транспортного средства. К одному из входов блока 304 подключен блок 310 входных сигналов с транспортного средства, имеющий группу входов 312 для подключения к соответствующим электрическим цепям транспортного средства, например указателям торможения, поворота и другим. К блоку 310 также подключена кнопка 314 подтверждения бодрствования. Для подключения блока 304 к бортовому компьютеру транспортного средства введен блок 316 сопряжения, вход которого соединен с блоком 304, а выход имеет соответствующий разъем 318. Блок 304 связан с интерфейсом 320 для связи с устройством 40 индикации.
Устройство 40 индикации связано с контроллером 30 через интерфейс 402, подключенный к блоку 404 управления индикацией, связанному с блоком 406 звуковой сигнализации и индикатором 408 уровня бодрствования, показывающему уровень бодрствования водителя по условной шкале, наличие радиосигналов от обоих телеметрических датчиков, а также световой сигнал тревоги.
Интерфейсы 302, 320 и 402 могут быть организованы по стандарту RS-232С или другому, используемому на транспортном средстве.
Устройство работает следующим образом.
Телеметрический датчик 10 крепится на палец, а датчик 12 - на запястье водителя. При контакте пар электродов 102, 104 и 122, 124 с кожей водителя обеспечивается возможность измерения электрического сопротивления кожи, характеризующего физиологическое состояние. Посредством АЦП 105 и 125 текущее значение сопротивления преобразуется в цифровой вид. Сигналы с выхода АЦП 105, 125 поступают на передатчики 106, 126. Кроме того, на эти передатчики поступает служебная информация о наличии гальванического контакта обоих пар электродов с телом водителя, о напряжении батареи питания датчиков, начале и окончании режима тестирования.
По запросу контроллера 30 информационный код вместе с признаками тестирования и ошибки подается на выход приемника 20. Блок 304 управления и цифровой обработки анализирует полученные с приемника 20 сигналы, соответствующие измеренному значению сопротивления кожи. На основе этого анализа, с учетом известных критериев состояния бодрствования по кожно-гальванической реакции [8], блок 304 определяет уровень бодрствования водителя. Кроме того, блок 304 управления и цифровой обработки анализирует полученные с приемника 20 сигналы об ошибках. К числу таких ошибок относятся:
а) отсутствие контакта электродов 102, 104 и 122, 124 с кожей водителя,
б) замыкание электродов 102, 104 и 122, 124 между собой,
в) отсутствие радиосигнала от обоих датчиков 10 и 12,
г) сбои в работе приемника 20.
Алгоритм работы блока 304 предусматривает, при наличии упомянутых ошибок, подачу определенного сигнала на блок 404 управления индикацией, который переводит индикатор 408 в особый режим работы (например, мигание), либо выдает звуковой сигнал посредством блока 406.
В соответствии с уровнем бодрствования через интерфейс 320 на вход устройства 40 индикации поступает код состояния индикатора 408. Блок 404 управления индикацией подключает необходимое число элементов индикатора (например, светодиодов) и при критическом снижении уровня бодрствования подает сигнал на блок 406 звуковой сигнализации. Звуковой сигнал тревоги требует от водителя нажатия кнопки 314 подтверждения бодрствования. Если водитель нажал кнопку 314 или блок 310 входных сигналов с транспортного средства, зарегистрировал сигнал по любому из входов 312, работа всей системы продолжается в прежнем режиме. В том случае, если с выхода блока 310 на блок 304 не поступило никакого сигнала, подтверждающего бодрствование, блок 304 выдает сигналы на блок 306 формирования управляющих воздействий, выходные клеммы 308 которого подключены к функциональным системам транспортного средства. При использовании патентуемой телеметрической системы на автодорожном транспорте и речных судах это - системы световой и звуковой сигнализации, управления впрыском топлива, управления пневматической подвеской. На железнодорожном транспорте управляющее воздействие подается на систему аварийного торможения.
При наличии в транспортном средстве бортовой сети стандарта CAN BUS патентуемая телеметрическая система может быть подключена к бортовому компьютеру транспортного средства посредством блока 316 сопряжения через разъем 318, которые выполнены также в стандарте CAN BUS. В бортовую сеть транспортного средства в этом случае может передаваться информация о текущем уровне бодрствования водителя, включении звукового сигнала тревоги, активизации водителем кнопки 314 подтверждения бодрствования, информации о выдаче сигналов на блок 306 формирования управляющих воздействий. Кроме того, в бортовую сеть может выдаваться информация и о состоянии самой системы контроля бодрствования (например, о возникновении сбоев, потере контакта телеметрического датчика с кожей руки водителя, разряде элемента питания датчика и о прочих нерегламентных ситуациях в работе системы).
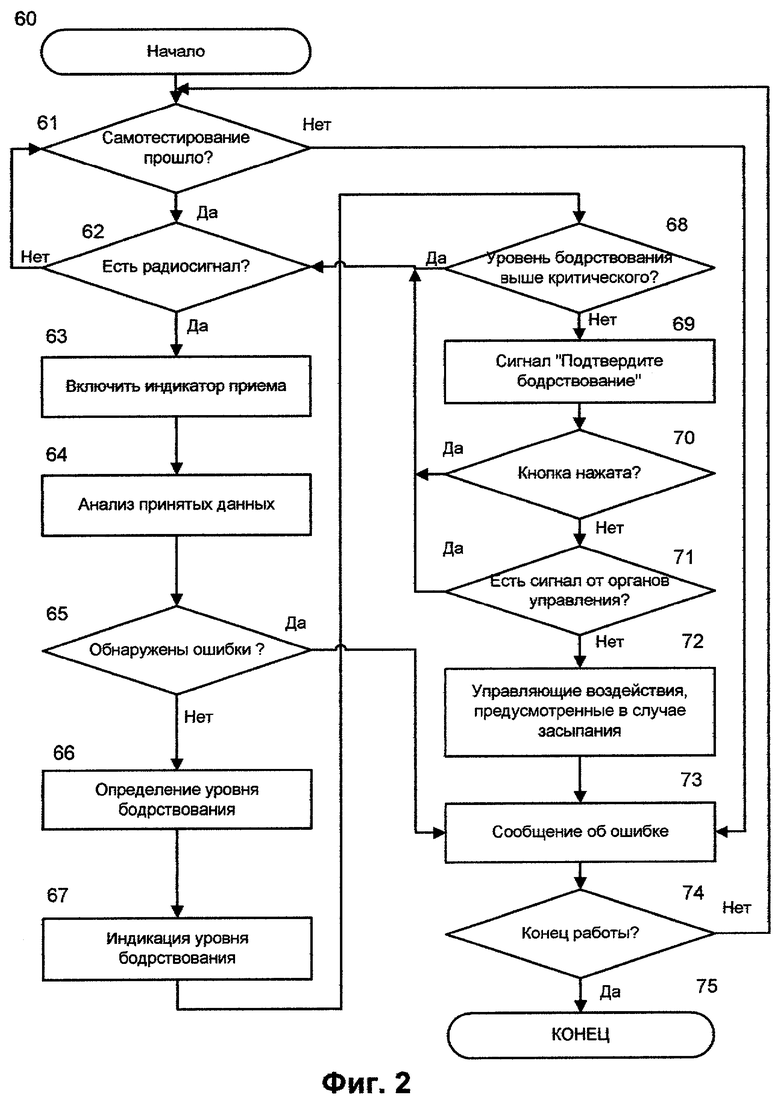
Алгоритм функционирования системы показан на фиг.2.
При включении питания (п.60) проходит самотестирование стационарной части системы - блоков 20, 30 и 40 (п.61), в процессе которого проверяется правильность функционирования ее блоков. При обнаружении ошибок выдается сообщение (п.73), после чего водитель принимает решение (п.74) относительно дальнейшего использования системы: продолжить работу системы (п.61) или отключить ее (п.75).
Если самотестирование прошло успешно, проводится проверка наличия сигналов от датчиков 10, 12 (п.62). В том случае, если сигнал от обоих датчиков 10, 12 отсутствует, система возвращается в цикл самотестирования (п.61). При наличии хотя бы одного из сигналов включается индикатор 408 приема сигнала от соответствующего датчика (п.63) и производится анализ принимаемых данных (п.64). В случае обнаружения ошибок (п.65), сообщение о которых передал датчик 10 или 12 или приемник 20 (см. выше позиции в перечне ошибок за исключением п.«в»), выдается сообщение (п.73). После этого водитель принимает решение (п.74) относительно дальнейшего использования системы: устранить причину ошибки и продолжить работу системы (п.61) или отключить систему (п.75).
При отсутствии ошибок проводится арифметическое суммирование цифровых сигналов датчиков 10, 12 в режиме реального времени и определение уровня бодрствования (п.66) и его индикация (п.67). Далее проводится проверка уровня бодрствования (п.68) по известным критериям [8]. Если уровень бодрствования выше критического, система возвращается в п.62 по циклу. Если уровень бодрствования ниже критического, выдается звуковой сигнал «Подтвердите бодрствование», а также включается световой индикатор тревоги (п.69). Проверяется ответная реакция водителя (п.70): нажата ли в течение заданного времени кнопка 314.
Если кнопка 314 нажата, система возвращается на шаг (п.62). Одновременно проверяется наличие сигналов от органов управления транспортным средством (п.71) с группы входов 312, например, указателей торможения, поворота и другим. Если хотя бы один из этих сигналов присутствует, то система возвращается на шаг п.62. При отсутствии таких сигналов подается управляющее воздействие на выходы 308 и соответствующее сообщение об ошибке (п.73). После этого водитель принимает решение (п.74) относительно дальнейшего использования системы: продолжить работу системы, устранив причину ошибки (п.61), или отключить систему (п.75).
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ОПЕРАТОРА ПО УРОВНЮ БОДРСТВОВАНИЯ И ПРЕДВЕСТНИКАМ ГИПОГЛИКЕМИИ | 2003 |
|
RU2251156C1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ БОДРСТВОВАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2200095C1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ БОДРСТВОВАНИЯ МАШИНИСТА ЛОКОМОТИВА | 2008 |
|
RU2376159C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ПЕРЧАТКА ДЛЯ ВОДИТЕЛЯ ТРАНСПОРТА, ПРЕПЯТСТВУЮЩАЯ ДРЕМОТЕ ЗА РУЛЕМ | 2011 |
|
RU2455694C1 |
| НАРУЧНЫЙ БИОМЕТРИЧЕСКИЙ ПРИБОР СИСТЕМЫ АВАРИЙНОЙ СИГНАЛИЗАЦИИ ДЛЯ ХОДОВОЙ НАВИГАЦИОННОЙ ВАХТЫ НА МОСТИКЕ | 2022 |
|
RU2791965C1 |
| ТЕЛЕМЕТРИЧЕСКИЙ ДАТЧИК ДЛЯ КОНТРОЛЯ БОДРСТВОВАНИЯ ПО СИГНАЛАМ ЭЛЕКТРОДЕРМАЛЬНОЙ АКТИВНОСТИ | 2016 |
|
RU2631364C1 |
| УСТРОЙСТВО ТЕЛЕМЕТРИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ БОДРСТВОВАНИЯ РУЛЕВОГО ВАХТОВОЙ СМЕНЫ ЭКИПАЖА КОРАБЛЯ | 2017 |
|
RU2683914C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ БОДРСТВОВАНИЯ ЧЕЛОВЕКА | 2016 |
|
RU2734329C2 |
| СИСТЕМА АВАРИЙНОЙ СИГНАЛИЗАЦИИ ДЛЯ ХОДОВОЙ НАВИГАЦИОННОЙ ВАХТЫ НА МОСТИКЕ | 2022 |
|
RU2793961C1 |
| СПОСОБ КОНТРОЛЯ УРОВНЯ БОДРСТВОВАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА В РЕЙСЕ | 2021 |
|
RU2771082C1 |
Изобретение относится к технике диагностики психофизиологического состояния человека в процессе профессиональной деятельности. Система содержит связанные по радиоканалу приемник и два телеметрических датчика, а также блок обработки сигналов и управления, связанный с блоком индикации. Каждый датчик имеет электроды для обеспечения электрического контакта с кожей водителя, подключенные к аналого-цифровому преобразователю, выход которого подключен к передатчику с антенной. Один из датчиков выполнен с возможностью установки на запястье, а другой - на пальце руки водителя. Передатчики обоих телеметрических датчиков и приемник выполнены с возможностью передачи и приема индивидуальных сигналов от каждого из телеметрических датчиков. Блок обработки сигналов и управления выполнен с возможностью суммирования сигналов от обоих датчиков в режиме реального времени. Изобретение позволяет повысить достоверность контроля бодрствования для различных физиологических типов водителей. 1 з.п. ф-лы, 2 ил.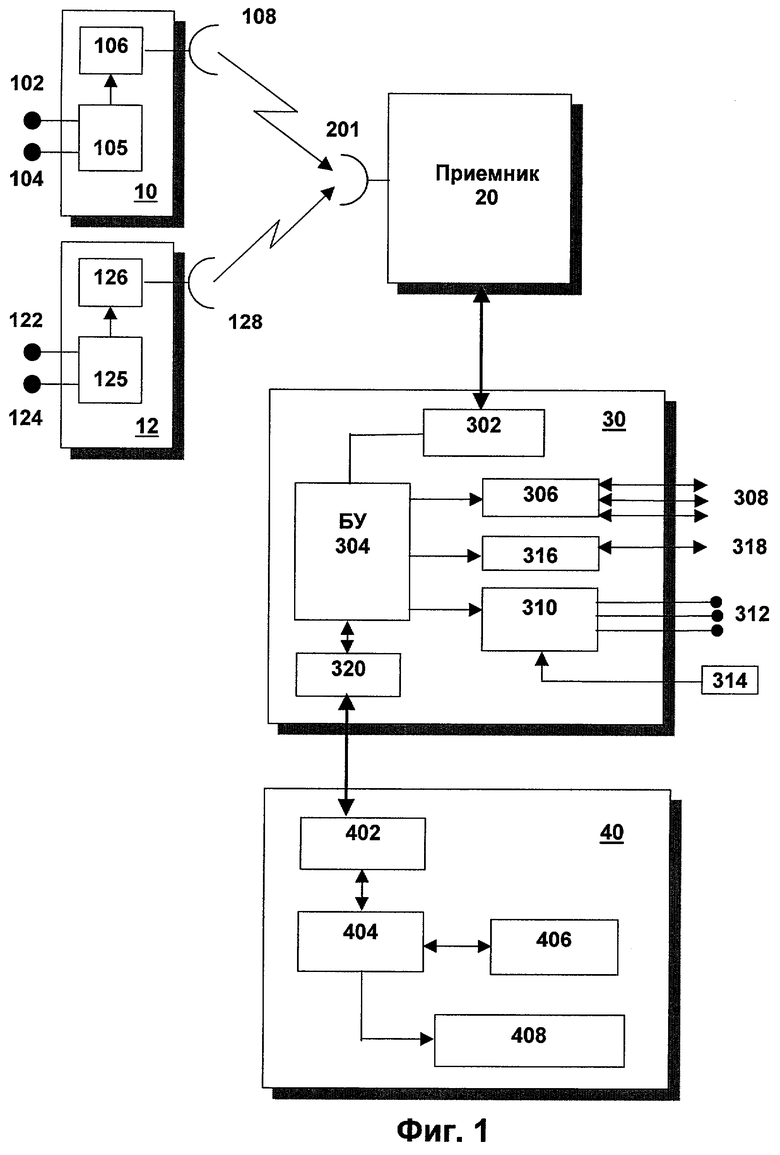
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ БОДРСТВОВАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2200095C1 |
| Приспособление к лесопильной раме для установки, закрепления и натяжения пил | 1927 |
|
SU33662A1 |
| Устройство для провертывания зерна в силосах | 1934 |
|
SU40261A1 |
| СПОСОБ ПОДДЕРЖАНИЯ РАБОТОСПОСОБНОСТИ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2111134C1 |

