Изобретение относится к устройствам предотвращения дремоты водителя транспорта по причине монотонии и может быть использовано как актуальное решение для повышения бдительности дорожного движения, а также как средство контроля работоспособности операторов опасных профессий.
Проблема поддержания работоспособности водителя транспортного средства является чрезвычайно актуальной в связи с улучшением качества как самих средств, так и дорожного покрытия.
Описано большое число приспособлений, которые позволяют по косвенным признакам, например положению головы и тела, расслаблению рук, открытию/закрытию глаз, отклонениям в параметрах физиологических сигналов (ЭКГ, ЭЭГ), натяжению ремня, стилю руления и траектории движения, автоматическими подключать различные пробуждающие сигналы. К последним относятся, например, звуковые, вибрационные или световые воздействия, разбрызгивание жидкости на лицо, одорирование и пр. При этом диагностика может быть осуществлена как рутинными психофизиологическими средствами исследования (нательными электродами), так миниатюрными средствами, например, встроенными в офтальмологические линзы.
Многолетними исследованиями установлено, что одним из наиболее информативных критериев перехода в состояние потери работоспособности водителя - засыпания - является изменение кожно-гальванической реакции (КГР) электродермальной активности (ЭДА) (RU 2107460, НЕЙРОКОМ, 27.03.1998; US 6167299, Galchenkov et al., NEUROCOM, 26.12.2000; EP 0925758 B1, Galchenkov et al., NEUROCOM, 14.01.2004). Система регистрации КГР содержит электроды со средствами их крепления, подключенные к входному устройству, средства для подавления импульсных помех, средства для выделения сигнала в полосе фазических составляющих электродермальной активности, средства для детектирования импульсов фазической составляющей, блок регистрации.
Технические аспекты реализации устройства на транспорте, обеспечение устойчивой телеметрии и поддержание бодрствования без создания дополнительных неудобств водителю приведены в описаниях телеметрических систем контроля бодрствования водителя транспортного средства (RU 2200095, 09.08.2001; RU 2251156, 27.04.2005 - НЕЙРОКОМ). Так, система по патенту RU 2251156 включает телеметрический датчик, блоки приема, обработки сигнала и управления, блок индикации, включающий блок управления индикацией, к выходам которого подключены блок звуковой сигнализации и индикаторы уровня бодрствования. Средство крепления блока телеметрического датчика на руке оператора выполнено в форме перчатки или ее части, а электроды установлены на внутренней поверхности перчатки с возможностью гальванической связи с кожным покровом руки.
Большое число приспособлений относится именно к перчаткам, снабженным сигнализатором. Так, описана перчатка (US 7688213, Power, 30.03.2010), которая содержат четыре датчика давления, связанные с контрольным устройством, причем сравнение сигналов проводится между одним из них и тремя другими, что, по мнению изобретателя, оказывается более информативным. В изобретении (US 6172610, Prus, 09.01.2001) сила сжатия руля определяется между перчаткой и рулевым колесом, причем перчатка имеет датчик кожного сопротивления (skin resistance) руки, по которому судят о степени сжатия руля. Кожное сопротивление, как отмечается, более достоверно для определения усилия сжатия руля, поскольку учитывает перспирацию и температуру руки под перчаткой. Описана перчатка для водителя (СА 2605998, BELLEHUMEUR, 07.12.2006), использующая измерения электропроводности кожи водителя для выявления содержания алкоголя или наркотиков по величине пота и значению температуры и выработки сигнала для отключения зажигания автомобиля, однако это изобретение не оценивается с точки зрения управления монотонней.
В изобретении (JP 60139539, OOSHIMA KENJI et al., 24.07.1985 - ближайший аналог) описана перчатка для предотвращения дремоты у водителя по ЭДА: один электрод размещен на большом пальце перчатки, другой - на запястье. Перчатка выполнена двухслойной: между слоями размещены проводники, связывающие электроды с микроконтроллером и сигнализатором.
Однако анализ показывает, что указанная перчатка недостаточно физиологична, а кроме того, не учитываются реальные условия (освещенность, шумовой фон при движении транспортного средства, его вибрации и т.п.), в которых происходит управление и снижающие надежность системы в целом.
Настоящее изобретение направлено на преодоление указанных недостатков ближайшего аналога, а именно повышение физиологичности, учета большего числа факторов, определяющих безопасность системы «человек - транспорт», а также информативности при противодействии опасности.
Патентуемая интеллектуальная перчатка для водителя транспорта, препятствующая дремоте за рулем, содержит размещенные в корпусе микроконтроллер, связанные с ним орган управления, звуковой сигнализатор и аккумуляторную батарею источника питания, оболочку перчатки из тканого материала с тыльной и пальцево-ладонной стенками, датчик электродермальной активности, содержащий электроды, установленные на внутренней поверхности пальцево-ладонной стенки оболочки с возможностью гальванической связи с кожным покровом руки водителя и подключенные к сигнальным входам микроконтроллера, управляющий выход которого подключен к звуковому сигнализатору.
Интеллектуальная перчатка дополнительно содержит связанные с микроконтроллером датчик освещенности, микрофон шумовой обстановки, трехкоординатный акселерометр, сигнальный RGB-светодиод, USB-порт для подключения к зарядному устройству или персональному компьютеру. Звуковой сигнализатор содержит генератор звуковой информации с динамиком, блок памяти, тактильный вибрационный сигнализатор. Орган управления включает кнопку подтверждения бдительности, сенсорный регулятор индивидуальной чувствительности, сенсорный регулятор громкости звуковой информации динамика.
Тактильный вибрационный сигнализатор выполнен в виде вибромотора и прикреплен к внутренней поверхности пальцево-ладонной стенки оболочки с возможностью контакта с боковой поверхностью основной фаланги второго пальца со стороны первого межпальцевого промежутка. Кнопка подтверждения бдительности прикреплена на той же боковой поверхности со стороны средней фаланги второго пальца дистальнее вибрационного сигнализатора с возможностью нажатия кнопки первым пальцем той же руки.
Устройство может характеризоваться тем, что внешняя оболочка перчатки дублирована профилированной накладкой из неэластичного антифрикционного материала таким образом, что накладка охватывает ладонную часть пальцево-ладонной стенки, первый межпальцевый промежуток со стороны оболочки для второго пальца и тыльную пястную часть стенки. При этом вибромотор, кнопка и электрические соединительные проводники размещены между оболочкой и накладкой, а корпус прикреплен к накладке.
Устройство может характеризоваться и тем, что корпус выполнен в форме диска, одним основанием прикрепленным к тыльной стенке оболочки. При этом на другом его основании размещены сенсорные регуляторы индивидуальной чувствительности и громкости звуковой информации, установленные с возможностью управления другой рукой, сигнальный RGB-светодиод, датчик освещенности и микрофон. В полости диска размещены микроконтроллер, акселерометр, аккумуляторная батарея источника питания, генератор звуковой информации и динамик. При этом разъем USB-порта размещен на боковой поверхности корпуса.
Устройство может характеризоваться также тем, что электроды выполнены из тканого электропроводного волокна и размещены на внутренней поверхности пальцево-ладонной стенки оболочки в зоне покрытия проксимальных фаланг третьего и четвертого пальцев, имеют форму двух протяженных полосок, размещенных с зазором параллельно одна другой по длине каждой оболочки.
Устройство может характеризоваться также и тем, что тканый материал представляет собой эластичный паропроницаемый материал, а кроме того, тем, что накладка из неэластичного антифрикционного материала представляет собой искусственную кожу.
Устройство может характеризоваться, кроме того, тем, что микроконтроллер выполнен с возможностью регистрации сигналов КГР, подавления импульсных помех, выделения сигнала в полосе фазических составляющих электродермальной активности и детектирования импульсов фазических составляющих, а также тем, что комплект включает интеллектуальную перчатку и одну оболочку перчатки или две интеллектуальных перчатки на каждую из рук.
Устройство может характеризоваться тем, что генератор звуковой информации представляет цифровой аудиопроигрыватель по типу mp3-плеера.
Технический результат настоящего изобретения состоит в повышении надежности и интеллектуальных свойств системы за счет одновременного учета как психофизиологического состояния водителя, так и его моторики его действий (подруливания) при управлении транспортом, а также оперативного учета внешних факторов, в которых находится водитель.
Существо изобретения поясняется на чертежах, где на:
фиг.1 показана блок-схема интеллектуальной перчатки;
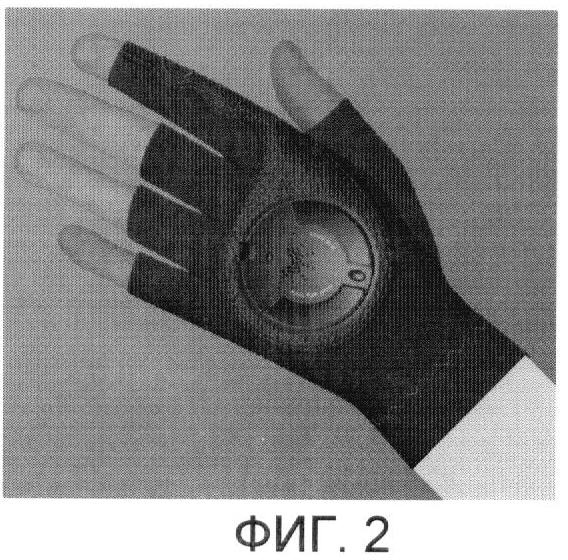
фиг.2 - внешний вид интеллектуальной перчатки на примере левой руки;
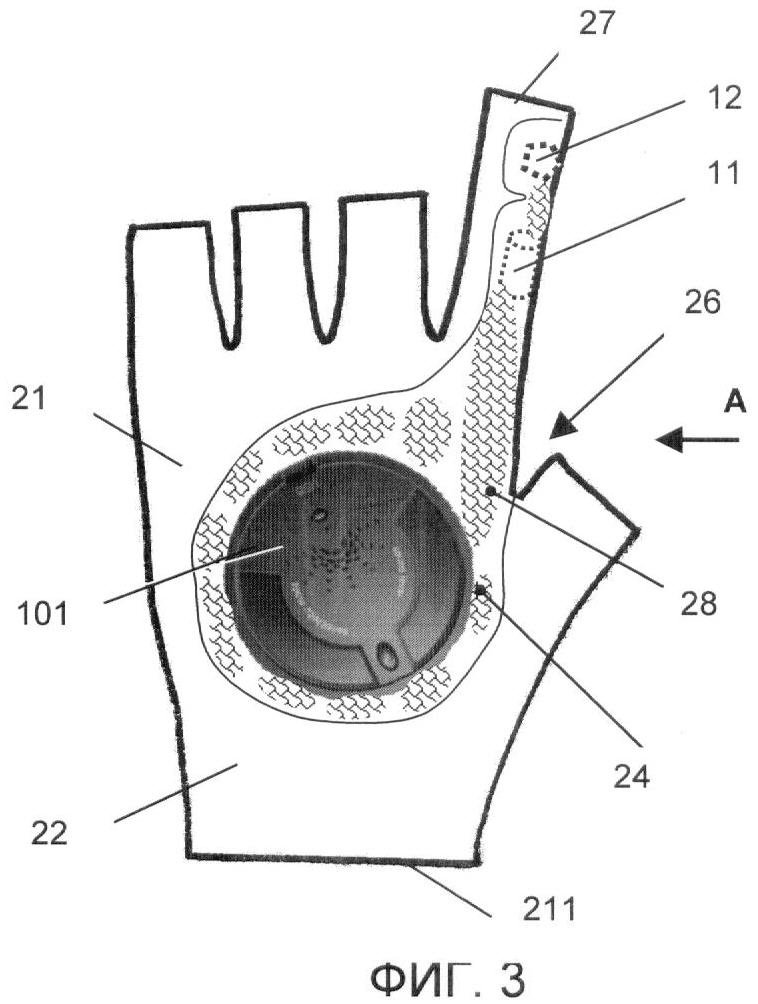
фиг.3 - конструкция оболочки перчатки и микроконтроллера;
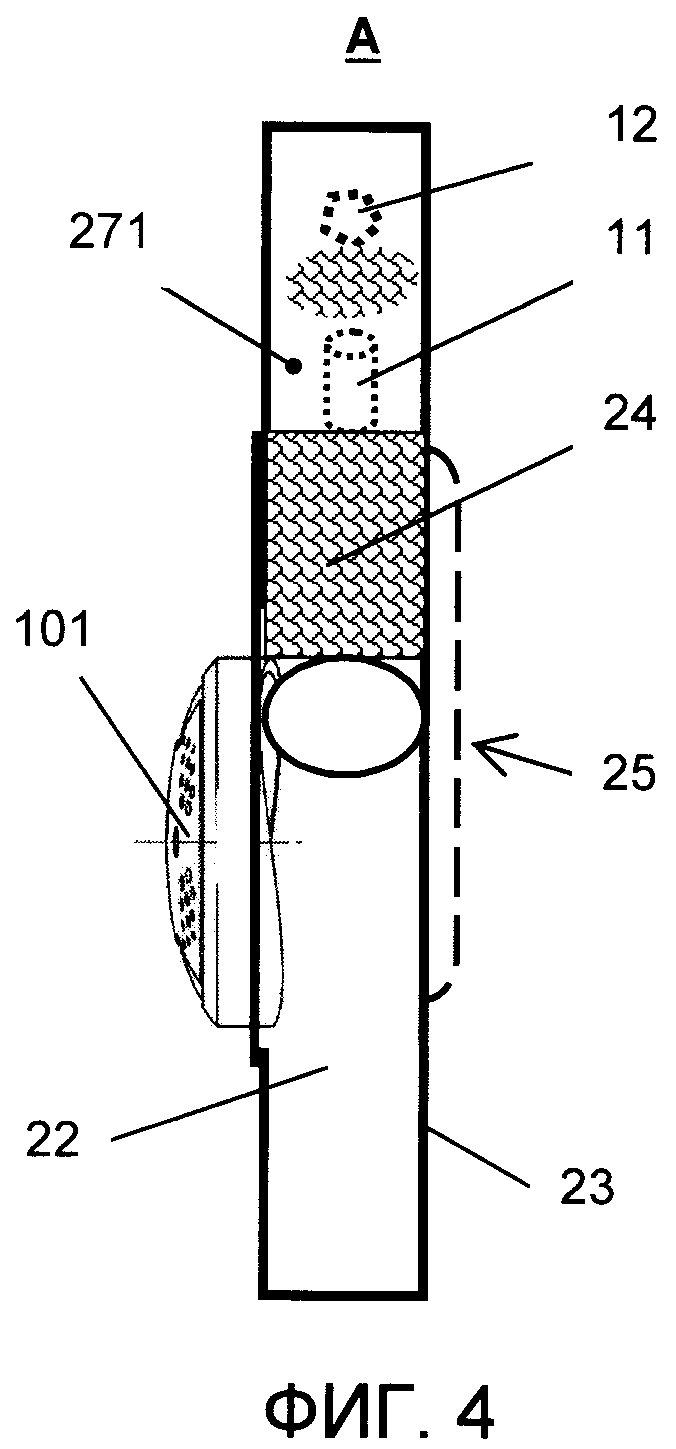
фиг.4 - то же, что на фиг. 3, вид сбоку;
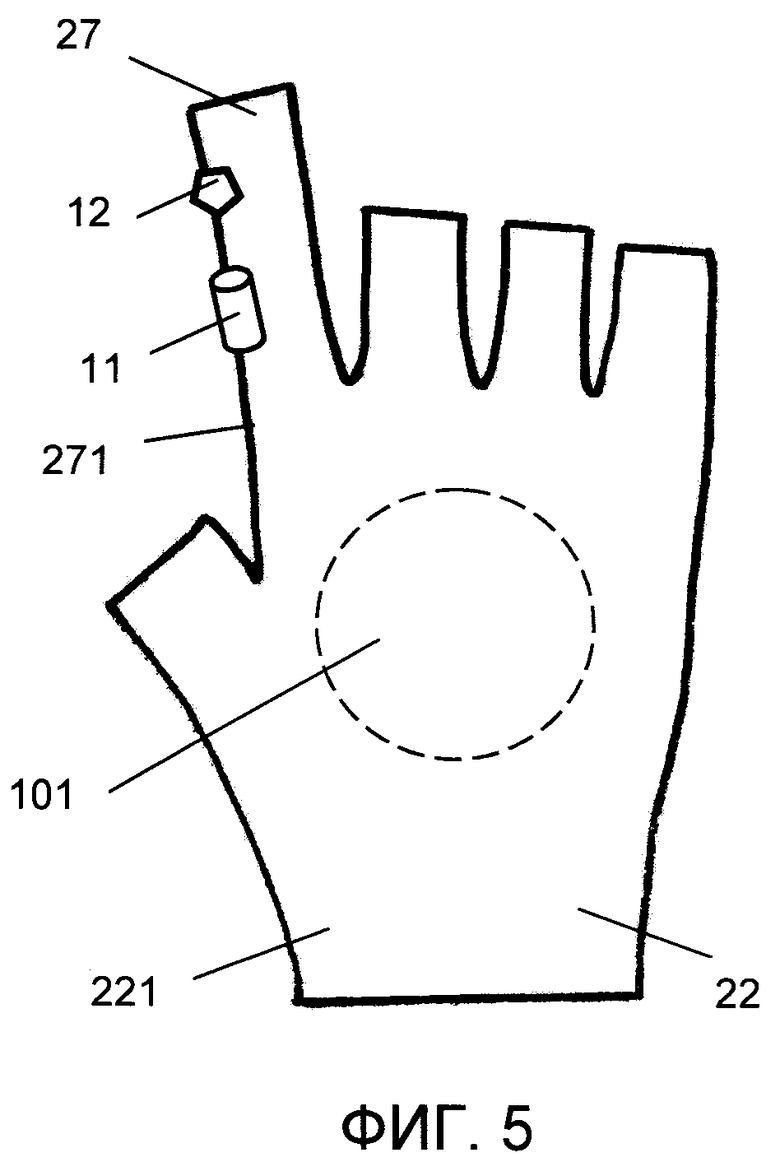
фиг.5 - вид на внутреннюю поверхность тыльной стенки;
фиг.6 - вид на внутреннюю поверхность пальцево-ладонной стенки;
фиг.7 - органы управления и индикации микроконтроллера, общий вид;
фиг.8 - корпус микроконтроллера, вид сбоку;
фиг.9 - диаграмма состояний контроллера в процессе функционирования перчатки;
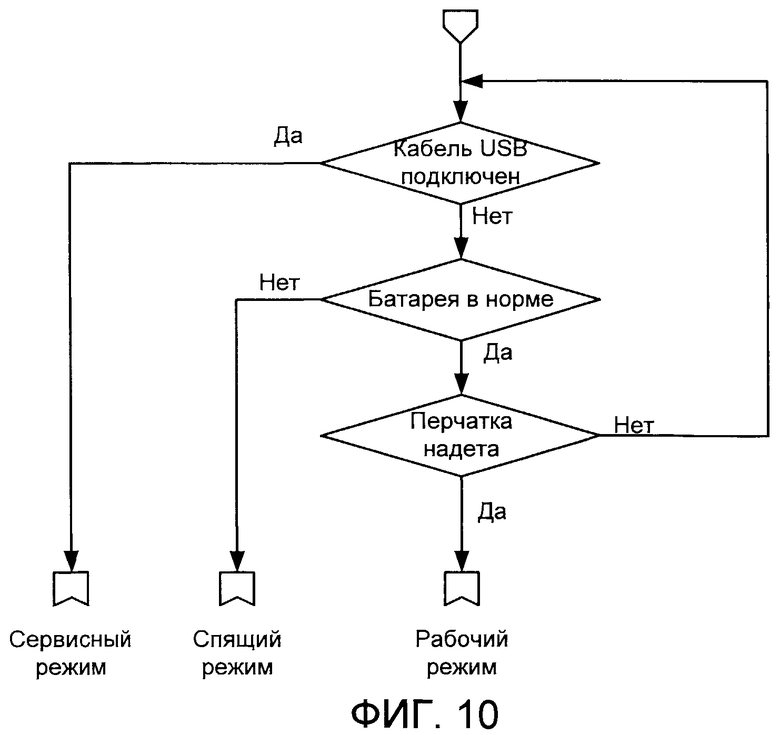
фиг.10 - алгоритм функционирования микроконтроллера в режиме ожидания;
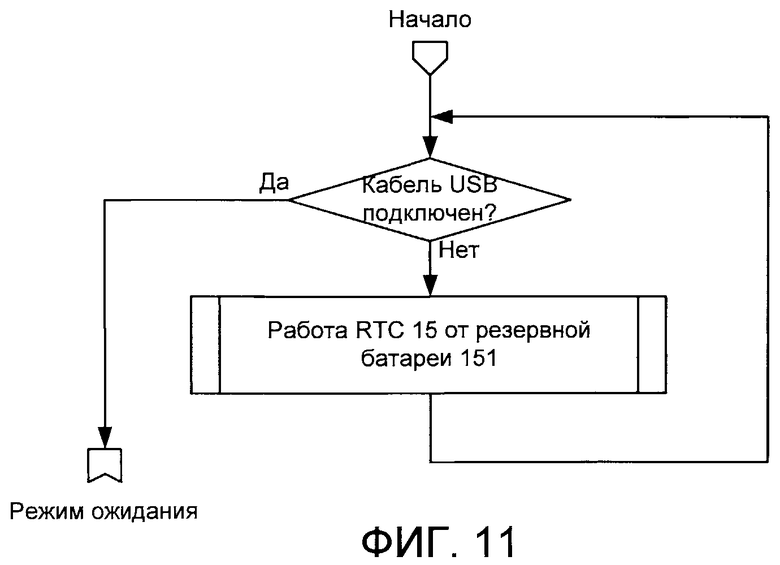
фиг.11 - алгоритм функционирования микроконтроллера в спящем режиме;
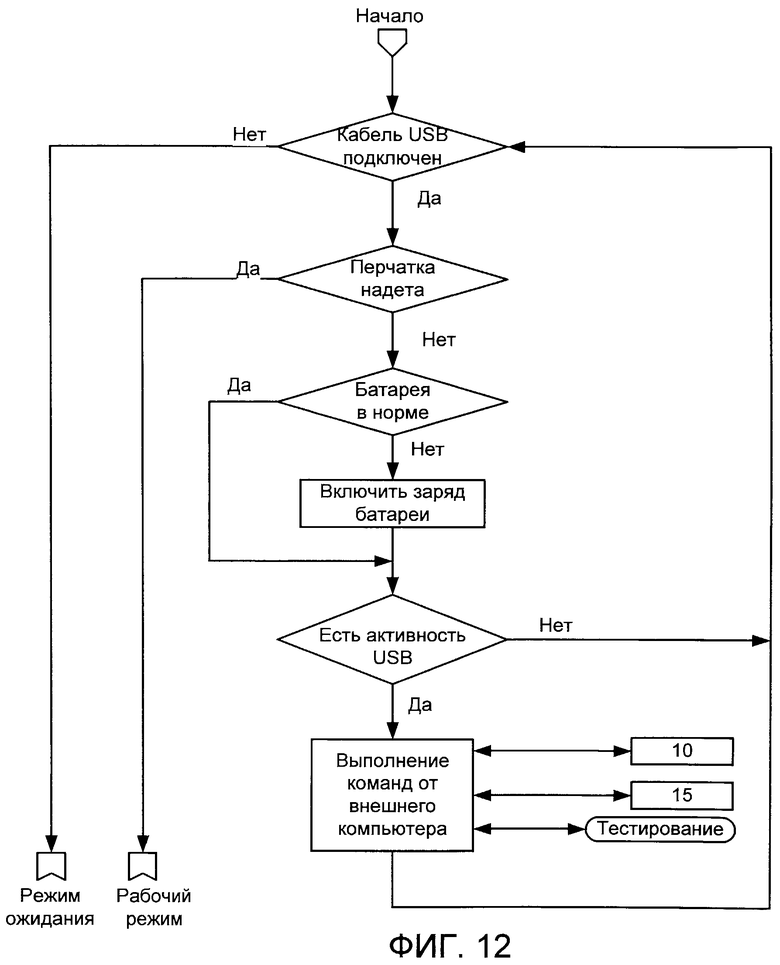
фиг.12 - алгоритм функционирования микроконтроллера в сервисном режиме;
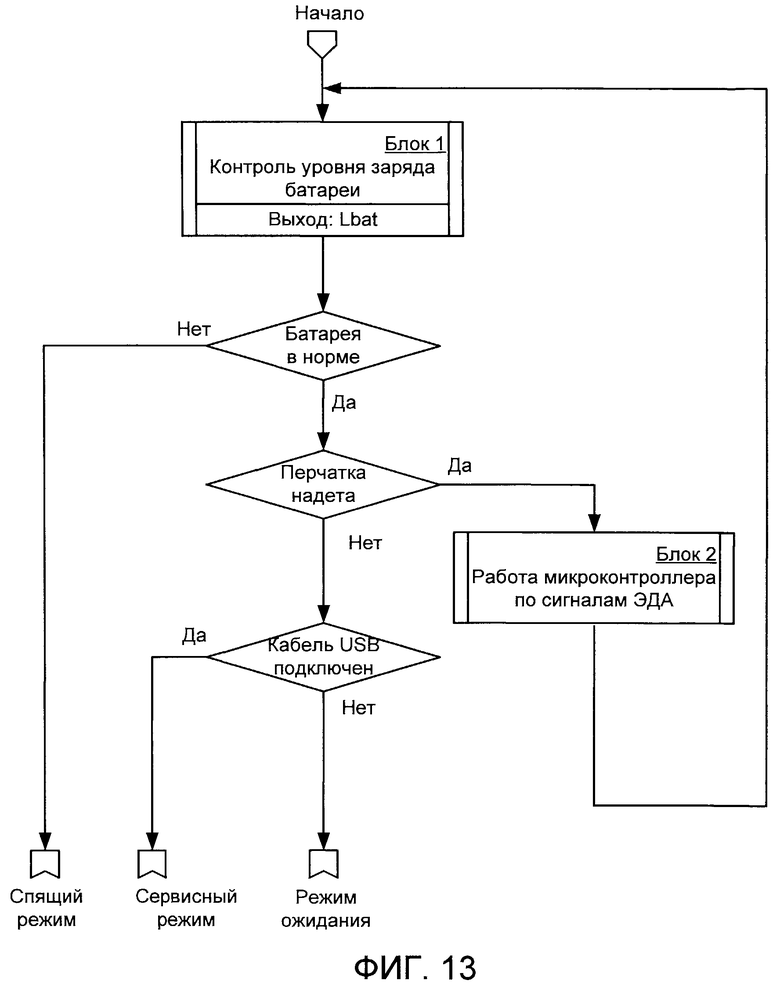
фиг.13 - алгоритм функционирования микроконтроллера в рабочем режиме;
фиг.14 - алгоритм функционирования микроконтроллера в рабочем режиме - контроль уровня заряда батареи;
фиг.15, 16 - алгоритм функционирования микроконтроллера по сигналам ЭДА.
Блок-схема интеллектуальной перчатки представлена на фиг.1. Устройство содержит микроконтроллер 1, выполненный на основе микросхемы PIC24FJ256 фирмы Microchip, с которым связан датчик 2 ЭДА, имеющий электроды с возможностью гальванической связи с кожным покровом руки водителя, размещенные в перчатке. Устройство содержит датчик 3 освещенности, микрофон 4 шумовой обстановки, трехкоординатный акселерометр 5, аккумуляторную батарею 6, сигнальный RGB-индикатор 7. Устройство также включает генератор 8 звуковой информации в виде, например, mp3-плеера, динамик 9, блок 10 памяти, тактильный вибрационный сигнализатор 11, кнопку 12 подтверждения бдительности водителя, сенсорный регулятор 13 индивидуальной чувствительности, сенсорный регулятор 14 громкости звуковой информации из динамика 9, USB-порт 15 для подключения к бортовой сети автомобиля или к персональному компьютеру, часы точного времени RTC 16, которые питаются от собственной батареи 161.
На фиг. 2 показан общий вид патентуемой перчатки, а на фиг.3-5 - конструкция устройства.
Датчик 2 ЭДА включает оболочку 21 из эластичного тканого материала с тыльной 22, пальцево-ладонной 23 стенками и запястной частью 211. На внешней поверхности тыльной стенки 22 укреплен корпус 101 микроконтроллера, установленный на профилированной накладке 24 из неэластичного антифрикционного материала таким образом, что накладка 24 охватывает ладонную часть 25 пальцево-ладонной стенки 23, первый межпальцевый промежуток 26 со стороны оболочки 27 для второго пальца и тыльную пястную часть 28 стенки. Вибромотор 11, кнопка 12 и электрические соединительные проводники (не показаны) размещены между оболочкой 21 и накладкой 24, а корпус 101 прикреплен к накладке 24. Накладка 24 выполняется из неэластичного антифрикционного материала, представляющего собой, например, искусственную кожу толщиной 1-2 мм, которая пришита к оболочке 21.
Внутренняя оболочка тыльной стенки 22 обозначена поз. 221 (фиг.5), внутренняя оболочка пальцево-ладонной 23 стенки обозначена поз. 231 (фиг.6). В качестве тканого материала для изготовления оболочки 21 перчатки применен эластичный паропроницаемый материал из смеси синтетических и натуральных волокон. Такой материал, известный из уровня техники, обычно используется для пошива спортивной одежды; он остается сухим и комфортным при интенсивном потоотделении.
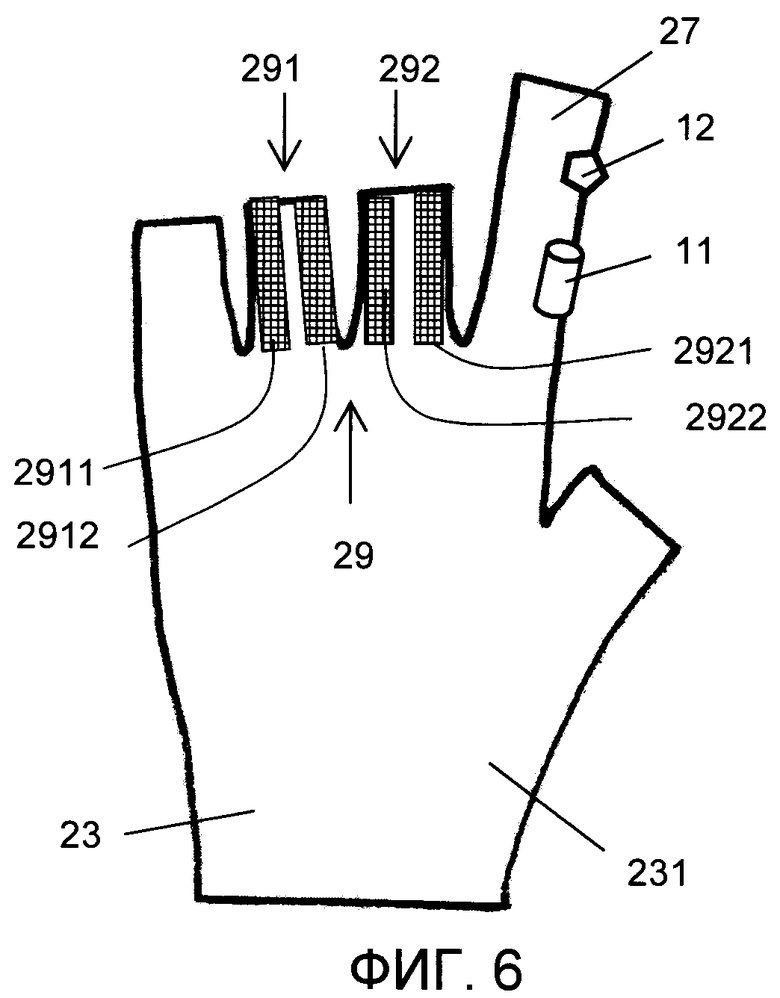
Электроды 29 выполнены из тканого электропроводного волокна и размещены на внутренней поверхности 231 пальцево-ладонной стенки 23 оболочки в зоне покрытия проксимальных фаланг любых пальцев. Например, как показано на фиг. 6, электроды 29 могут быть размещены в зоне покрытия 291, 292 проксимальных фаланг четвертого и третьего пальцев соответственно. Электроды 29 имеют форму двух пар протяженных полосок 2911, 2912 и 2921, 2922, размещенных с зазором параллельно одна другой по длине покрытий 291 и 292 каждой фаланги. Электроды 29 могут быть выполнены из электроактивного текстильного материала, например, ElekTex, который используется для изготовления гибких клавиатур и различных электроконтактных элементов.
Тактильный вибрационный сигнализатор выполнен в виде вибромотора 11 и прикреплен к внутренней поверхности 221 пальцево-ладонной стенки 22 оболочки с возможностью контакта с боковой поверхностью основной фаланги второго пальца 27 со стороны первого межпальцевого промежутка 26, а кнопка 12 подтверждения бдительности прикреплена на той же боковой поверхности 271 оболочки 27 со стороны средней фаланги второго пальца дистальнее вибромотора 11 с возможностью нажатия кнопки первым пальцем той же руки.
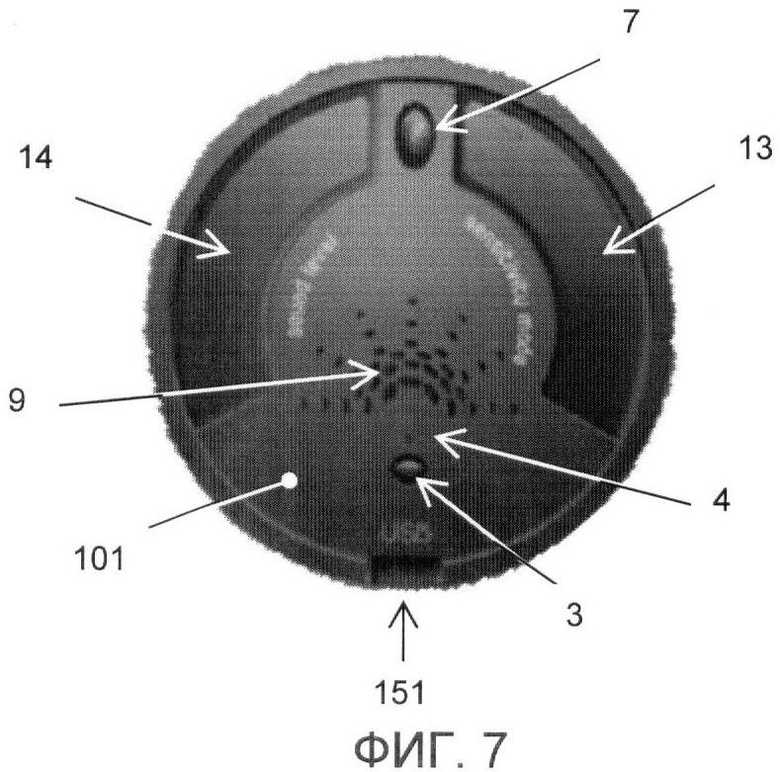
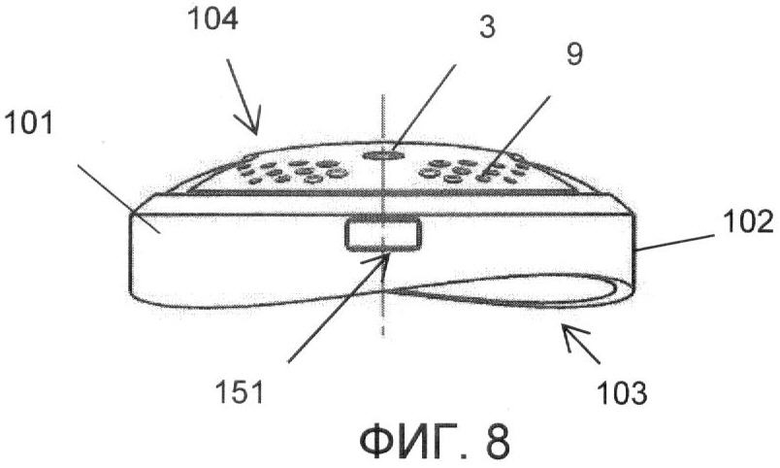
На фиг.7-8 показаны размещение органы управления и индикации микроконтроллера. Корпус 101 может быть выполнен, например, в форме диска 102, основанием 103 прикрепляемым к профилированной накладке 24, подшитой к тыльной стенке 22 оболочки. На другом основании 104 диска 102 размещены сенсорные регуляторы индивидуальной чувствительности 13 и громкости 14 звуковой информации, установленные с возможностью управления другой рукой. На лицевой стороне корпуса 101, обращенной к запястной части 211 перчатки, размещен сигнальный RGB-светодиод 7, датчик 3 освещенности и микрофон 4. В полости диска - микропроцессор 1, акселерометр 5, батарея 6, генератор 8 звуковой информации и динамик 9. Разъем 151 USB-порта 15 размещен на боковой поверхности корпуса 101 со стороны оболочек для пальцев.
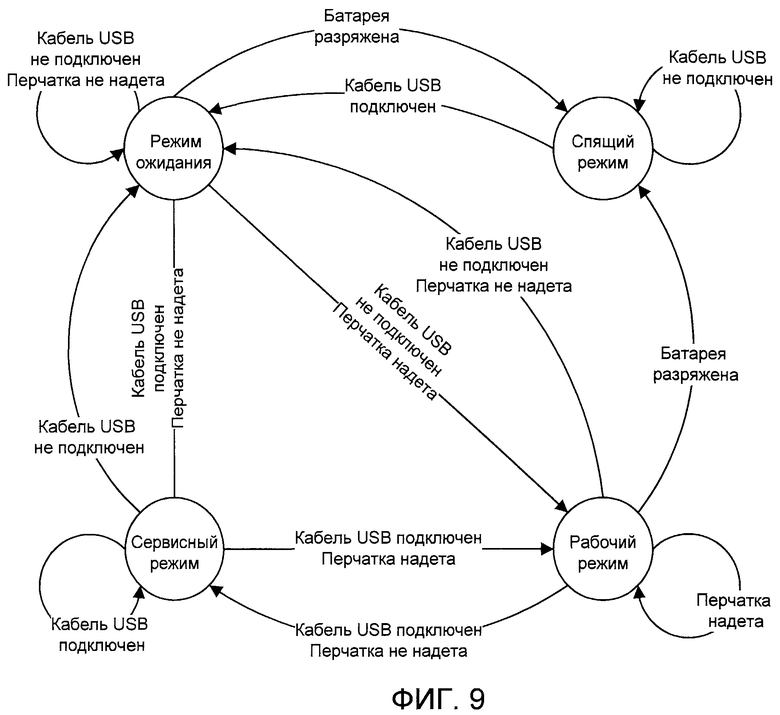
Интеллектуальная перчатка функционирует в четырех режимах, взаимоотношение между которыми схематично изображено на фиг.9: в режиме ожидания, в спящем и сервисном режимах и рабочем режиме, когда перчатка одета на руку водителя. На нижеследующих блок-схемах алгоритмов цифровые обозначения приведены в соответствии с номерами позиций блоков, приведенными в описании и на фиг.1.
Режим ожидания (фиг.10)
В режиме ожидания микроконтроллер находится при выполнении следующих условий:
- перчатка не надета;
- кабель USB-порта не подключен;
- батарея 6 в норме.
Каждые 16 секунд контролируется модуль полного электрического сопротивления между парами электродов 2911, 2912 и 2921, 2922 (фиг.6) на частоте 2 кГц. Если модуль полного сопротивления меньше или равен 40 кОм, то принимается решение, что перчатка надета на руку и микроконтроллер 1 переходит в рабочий режим работы.
Одновременно с контролем модуля полного сопротивления проверяется текущий заряд батареи 6, если он меньше 1%, то микроконтроллер 1 переходит в спящий режим работы.
В любой момент времени при подключении кабеля к разъему 151 USB-порта 15 микроконтроллер переходит в сервисный режим работы.
Спящий режим работы (фиг.11)
В спящем режиме микроконтроллер находится при полностью разряженной батарее 6. При этом функционируют только часы реального времени RTC 16, которые питаются от собственной батареи 161. Выход из этого режима возможен только при подключении кабеля USB-порта или при замене батареи 6.
Сервисный режим работы (фиг.12)
В сервисном режиме работы микроконтроллер находится при выполнении следующих условий:
- перчатка не надета;
- кабель USB-порта подключен.
В сервисном режиме производится заряд батареи 6, чтение содержимого блока 10 памяти, модификация программного обеспечения и тестирование микроконтроллера в условиях сервисного центра.
При надевании перчатки микроконтроллер 1 переходит в рабочий режим работы. При этом возможна нормальная работа интеллектуальной перчатки от зарядного устройства. Факт надевания перчатки фиксируется по алгоритму, как в режиме ожидания (фиг.10).
Рабочий режим работы (фиг.13)
В рабочем режиме микроконтроллер находится всегда, когда перчатка надета и батарея 6 в норме, и при этом выполняет следующие задачи:
- анализирует уровень заряда батареи 6 и при необходимости информирует об этом водителя (эта процедура «Блок 1» отдельно приведена на фиг.14 и описана ниже).
- анализирует сигналы электродермальной активности (ЭДА) и принимает решение о текущем состоянии водителя (эта процедура «Блок 2» отдельно приведена на фиг.15 и описана ниже).
Если батарея 6 разряжена до критического уровня, микроконтроллер предупреждает об этом водителя и переходит в спящий режим.
Если перчатка снята, то микроконтроллер переходит в режим ожидания или в сервисный режим в зависимости от того, подключен или нет кабель к USB-порту 15. Контроль снятия перчатки с руки осуществляется следующим образом:
- если текущее активное электрическое сопротивление между электродами 2911, 2912 и 2921, 2922 превышает 15 МОм, то производится измерение модуля полного сопротивления на частоте 2 кГц, и если модуль полного сопротивления больше 40 кОм, то принимается решение, что перчатка снята с руки.
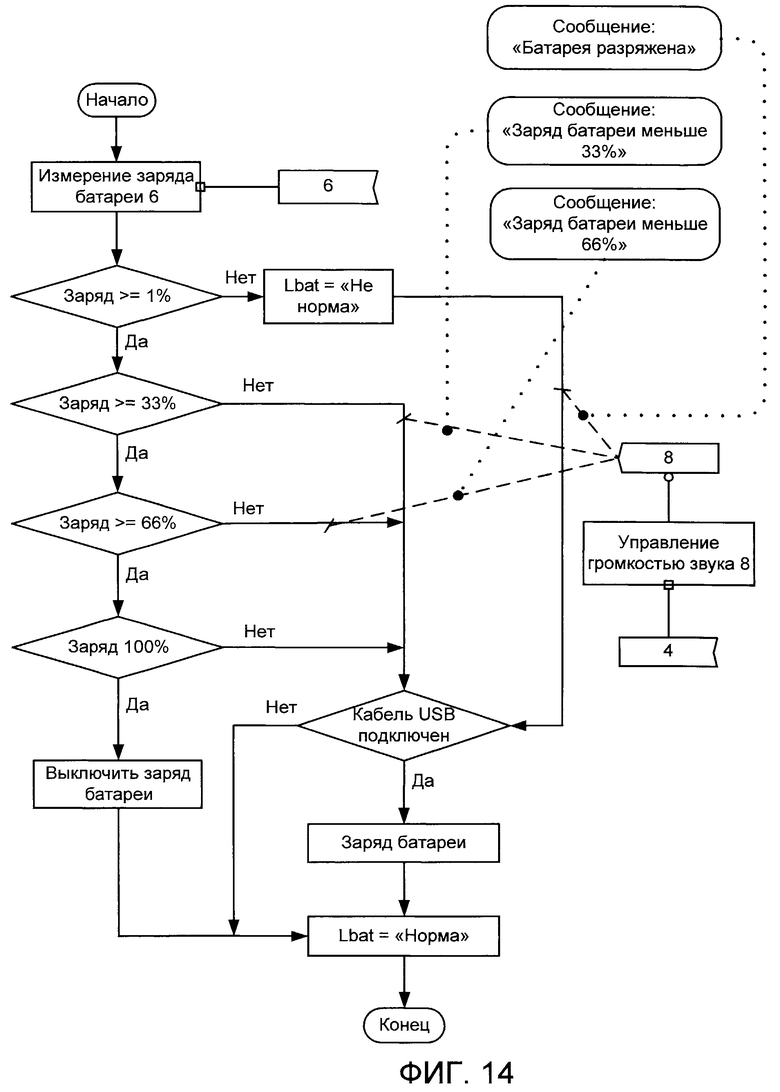
Алгоритм функционирования микроконтроллера в рабочем режиме при контроле уровня заряда батареи («Блок 1») показан на фиг.14. Выполняется периодический контроль уровня заряда батареи 6 и вычисляется текущий уровень ее заряда с учетом всех факторов, включая старение батареи. Информация о состоянии батареи выдается водителю в виде голосового сообщения через генератор 8 звуковой информации и динамик 9 при разряде батареи до 66% и 33% от своего максимального уровня. При полном разряде батареи выдается сообщение об аварийном выключении системы.
Если в рабочем режиме подсоединяется кабель USB-порта 15, то включается схема заряда батареи, которая работает вплоть до полного заряда батареи.
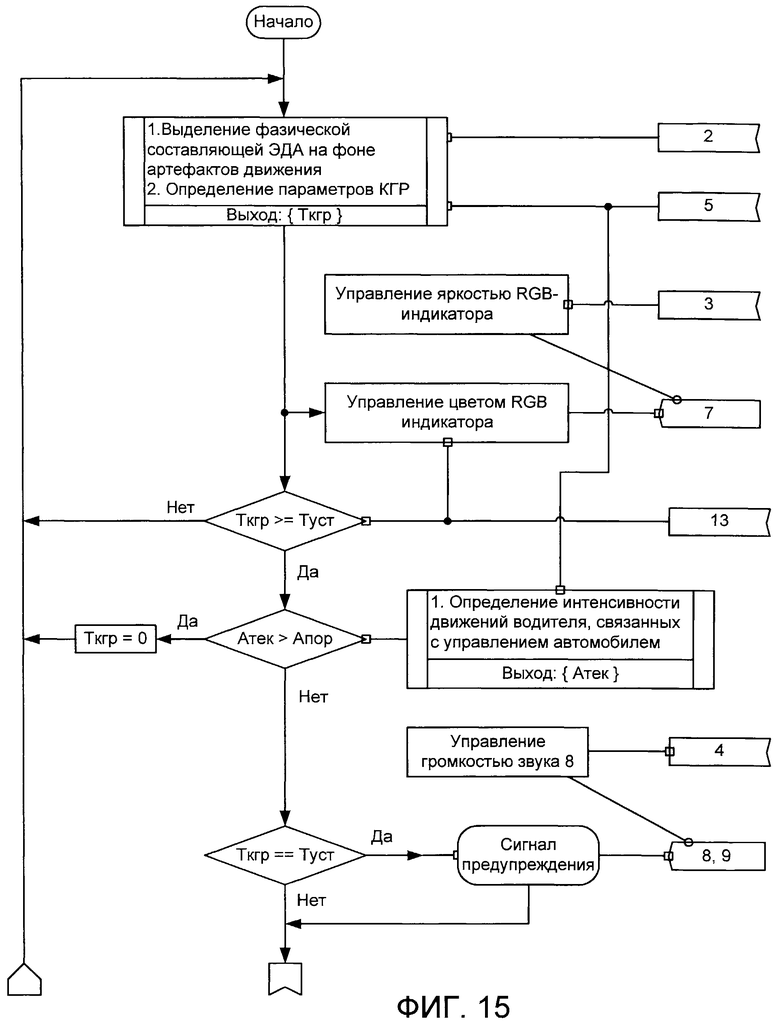
На фиг.15 представлена блок-схема алгоритма работы микроконтроллера по сигналам ЭДА, при этом использованы следующие обозначения: Ткгр - текущее время после фиксации последнего импульса КГР; Туст - установленный уровень предварительной сигнализации; Атек, Апор - текущий и пороговый уровни интенсивности движений рук водителя, связанных с управлением транспортом, соответственно.
В модуле обработки сигналов ЭДА проводится совместная обработка сигналов с датчика 2 и составляющих сигнала с частотой до 100 Гц, поступающих с трехкоординатного акселерометра 5. Цель - выделение фазических составляющих ЭДА на фоне артефактов движения транспортного средства, регистрируемых акселерометром 5 и определение параметров КГР. Выходным параметром является текущее время Ткгр после фиксации последнего импульса КГР.
Проверяется соответствие Ткгр установленному уровню Туст предварительной сигнализации.
В зависимости от текущего значения Ткгр и установленного уровня Туст предварительной сигнализации изменяется цвет свечения RGB-индикатора 7 от зеленого к красному цвету по линии G-R цветового треугольника. Яркость индикатора 7 устанавливается автоматически в зависимости от уровня освещенности салона автомобиля вблизи индикатора. Уровень освещенности измеряется с помощью датчика 3 освещенности.
При достижении параметром Ткгр значения, большего или равного Туст, посредством акселерометра 5 анализируется текущий уровень Атек интенсивности движений (моторики) рук водителя, связанных с управлением транспортным средством. Выявляются низкочастотные составляющие сигнала акселерометра с частотой меньше 100 Гц, которые сравниваются с пороговым уровнем Апор. Если Атек больше Апор, то принимается решение о том, что неопределение КГР обусловлено интенсивными движениями по управлению транспортным средством и параметр Ткгр обнуляется. В противном случае генератором 8 звуковой информации (mp3-плеер) через динамик 9 выдается звуковой предупреждающий сигнал. Начиная с этого момента, водитель может подтвердить свою бдительность "ОК" нажатием на кнопку 12, при этом параметр Ткгр обнуляется.
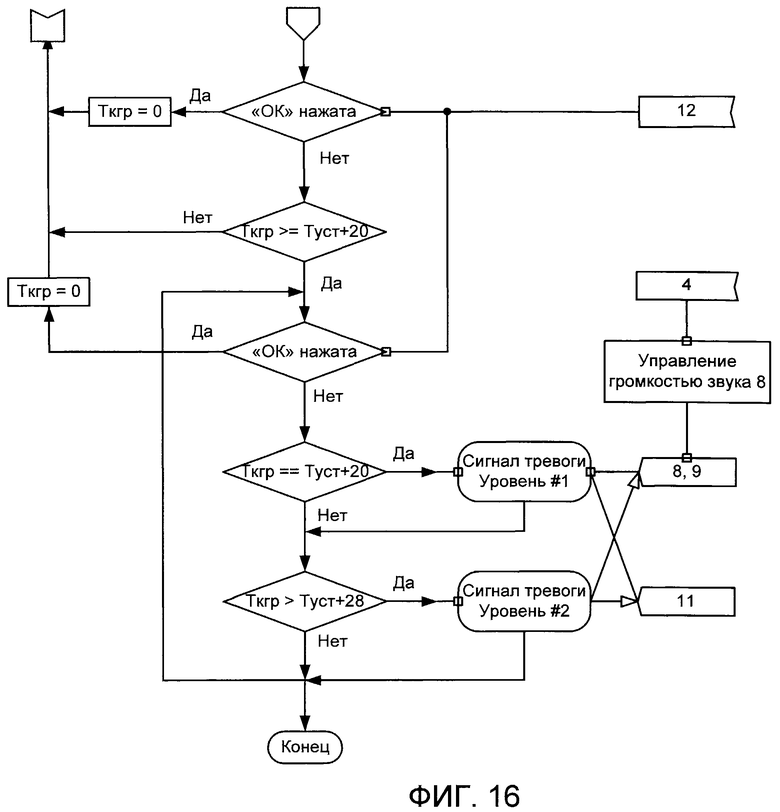
При достижении параметром Ткгр значения Туст + 20 сек, выдается звуковой сигнал тревоги «Уровень I» через генератор 8 и динамик 9. Одновременно выдается тактильный сигнал с помощью вибрационного сигнализатора 11 в виде серии коротких вибрационных импульсов. Начиная с этого момента, параметр Ткгр не анализируется, и водитель обязан подтвердить свою бдительность "ОК" нажатием на кнопку 12. После подтверждения бдительности параметр Ткгр обнуляется и анализ параметра Ткгр возобновляется.
При достижении параметром Ткгр значения Туст + 28сек, выдается звуковой сигнал тревоги «Уровень 2» через генератор 8 и динамик 9. Одновременно выдается тактильный сигнал с помощью вибрационного сигнализатора 11 в виде непрерывной последовательности коротких вибрационных импульсов.
После подтверждения бдительности «ОК» кнопкой 12, значение Ткгр обнуляется и анализ параметра Ткгр возобновляется.
Уровень Туст предварительной сигнализации может изменяться водителем с помощью емкостного сенсорного регулятора 13 индивидуальной чувствительности «Установка чувствительности», выполненного в виде слайдера. Информация о текущем уровне чувствительности выдается водителю в виде голосового сообщения после каждого изменения чувствительности.
Относительный уровень громкости всех звуковых сигналов может изменяться водителем с помощью емкостного сенсорного регулятора 14 громкости звуковой информации «Регулировка громкости», также выполненного в виде слайдера. В дальнейшем этот относительный уровень громкости поддерживается автоматически в зависимости от уровня шума в кабине транспортного средства. Измерение уровня шума производится с помощью микрофона 4.
Все значимые события алгоритма записываются во встроенную энергонезависимую память - блок памяти 10 в сопровождении меток времени, которые считываются из RTC 16.
Комплект может включать одну интеллектуальную перчатку и одну оболочку перчатки для другой руки. В последнем случае оболочка перчатки используется по своему прямому назначению. Сущность изобретения не изменяется, если обе руки водителя имеют интеллектуальные перчатки, однако такой вариант является избыточным.
При надевании перчаток, например, на левую руку интеллектуальной перчатки, а на правую - оболочки перчатки (митенки) перчатка включается автоматически, и микроконтроллер 1 начинает процедуру самотестирования функциональных узлов перчатки. После завершения самотестирования микроконтроллер выдает голосовое сообщение о начале работы и начинает анализировать сигнал ЭДА с электродов 29.
Устройство работает следующим образом.
1.1. Включение прибора
- Включение прибора происходит не более, чем через 16 сек после надевания интеллектуальной перчатки на руку или при удержании в нажатом состоянии кнопки 12 подтверждения бодрствования водителя в течение 5 сек.
Микроконтроллер проводит самотестирование. Если обнаружена неисправность, то выдается голосовое сообщение от генератора 8 характере неисправности. Следующее включение прибора возможно только по нажатию и удержанию кнопки 12 подтверждения бодрствования водителя в течение 5 сек.
- Микроконтроллер выдает голосовое сообщение о начале работы прибора и о текущем уровне заряда батареи.
- Индикация включенного состояния - непрерывное свечение RGB-индикатора 7 зеленого цвета. Яркость индикатора 7 - в зависимости от уровня освещенности салона транспортного средства вблизи индикатора, получаемого с датчика 3.
- Устройство всегда включается в режим «чувствительности» - «загородный».
- После включения отменяется проверка бодрствования водителя на 5 мин.
1.2. Контроль состояния бодрствования водителя
Микроконтроллер анализирует сигнал ЭДА с электродов 29 совместно с сигналом трехкоординатного акселерометра 5. Уровень бодрствования определяется по условной шкале в зависимости от параметра Ткгр (см. фиг.15).
а. Нормальный уровень бодрствования - Ткгр меньше установленной чувствительности Туст.
- Индикация нормального уровня бодрствования - зеленый цвет RGB-индикатора 7.
- Яркость индикатора - в зависимости от уровня освещенности салона транспортного средства вблизи индикатора, получаемого с датчика 3.
б. Пониженный уровень бодрствования - Ткгр больше Туст, но меньше Туст + 20 сек и текущая интенсивность движений водителя, связанных с управлением транспортного средства, Атек меньше порогового значения Апор.
- Индикация перехода к пониженному уровню бодрствования - звуковой сигнал предупреждения от генератора 8.
- Уровень громкости - средний, зависит от среднего уровня шума в кабине транспортного средства, получаемого с микрофона шумовой обстановки 4.
- Индикация текущего уровня бодрствования - изменение цвета RGB-индикатора 7 от зеленого к красному цвету по линии G-R цветового треугольника за время 20 сек.
- Яркость индикатора - в зависимости от уровня освещенности салона транспортного средства вблизи индикатора 7, получаемого с датчика 3.
в. Подкритический уровень бодрствования - Ткгр больше Туст + 20 сек, но меньше Туст + 28 сек.
- Индикация перехода к подкритическому уровню бодрствования сигнал тревоги «Уровень 1» - звуковой сигнал совместно с тактильный вибрационным сигналом от вибромотора 11. Вид сигнала:
- одна серия из трех последовательных импульсов вибрации вибромотора 11 (0,5 сек вибрация, 0,5 сек - пауза);
- звуковой сигнал от генератора 8 через динамик 9 синхронно с импульсами вибрации от вибромотора 11;
- уровень громкости - средний, зависит от среднего уровня шума в кабине транспортного средства, получаемого с микрофона 4 шумовой обстановки.
- Индикация подкритического уровня бодрствования - красный цвет RGB-индикатора 7.
- Выход из этого режима возможен только по нажатию и отпусканию кнопки 12 подтверждения бодрствования.
г. Критический уровень бодрствования - Ткгр больше Туст + 28 сек.
- Индикация критического уровня бодрствования - сигнал тревоги «Уровень 2». Вид сигнала:
- красный цвет RGB-индикатора 7 с максимальной яркостью, мигающий с частотой 1 Гц;
- непрерывная последовательность импульсов вибрации вибромотора 11 (0,5 сек - вибрация, 0,5 сек - пауза);
- звуковой сигнал из динамика 9 с постепенно нарастающей громкостью от среднего уровня до максимального.
- Выход из этого режима возможен только по нажатию и отпусканию кнопки 12 подтверждения бодрствования.
1.3. Управление чувствительностью устройства
«Чувствительность» - это параметр алгоритма, позволяющий управлять значением критического уровня бодрствования интеллектуальной перчатки. Всего имеется три уровня чувствительности: «загородный», «смешанный» и «городской».
После включения устройства уровень чувствительности - «загородный».
Через 30 минут работы устройства с любым уровнем чувствительности, кроме «загородный», происходит автоматическое изменение уровня чувствительности на более жесткий уровень, при этом водителю выдается сервисное сообщение.
В любой момент времени водитель может изменить чувствительность с помощью сенсорного регулятора 13, выполненного в виде слайдера.
После изменения чувствительности сенсорной кнопкой отменяется проверка бодрствования водителя на время от 5 до 10 минут, в зависимости от вновь установленного уровня чувствительности (5 мин - «загородный» режим, 7,5 мин - «смешанный», 10 мин - «городской»).
1.4. Управление громкостью звуковых сообщений
В любой момент времени можно изменить относительный уровень громкости звуковых сообщений с помощью сенсорного регулятора 14. Выбранный уровень громкости поддерживается автоматически в зависимости от уровня шума в салоне транспортного средства.
1.5. Сервисные сообщения (в режиме контроля состояния бодрствования водителя):
- превышение допустимого времени непрерывной работы водителя (4 часа);
- критическое значение емкости батареи питания (менее 66%, менее 33%, батарея разряжена);
- индикация об отключении устройства по причине снятия его с руки;
- индикация о переходе на следующий, более жесткий уровень «чувствительности».
Патентуемая интеллектуальная перчатка для водителей транспорта способствует безопасности дорожного движения, обеспечивает надежность в противодействии наступлению дремоты за счет одновременного определения как психофизиологического состояния водителя, так и моторики действий его рук при рулении, также автоматического учета внешних факторов, в которых находится водитель.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство коммуникации слепоглухого человека | 2017 |
|
RU2675032C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2017 |
|
RU2673406C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ (ВАРИАНТЫ) | 2017 |
|
RU2670649C9 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ БОДРСТВОВАНИЯ МАШИНИСТА ЛОКОМОТИВА | 2008 |
|
RU2376159C1 |
| ИНДИВИДУАЛЬНОЕ РАДИОКАНАЛЬНОЕ УСТРОЙСТВО ОПОВЕЩЕНИЯ | 2009 |
|
RU2406156C1 |
| УСТРОЙСТВО И СПОСОБ ИМИТАЦИИ И ПЕРЕДАЧИ КОНТАКТНЫХ ЭКСТЕРОЦЕПТИВНЫХ ОЩУЩЕНИЙ | 2017 |
|
RU2708949C2 |
| МАНИПУЛЯТОР УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2009 |
|
RU2536422C2 |
| УСТРОЙСТВО И СПОСОБ ПРИЁМА И ПЕРЕДАЧИ ИНФОРМАЦИИ ПОСРЕДСТВОМ ШРИФТА БРАЙЛЯ | 2016 |
|
RU2651444C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ОБЩЕЙ ЧУВСТВИТЕЛЬНОСТИ В ВИРТУАЛЬНОЙ СРЕДЕ | 2021 |
|
RU2762857C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА СОСТОЯНИЕМ БОДРСТВОВАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2214931C2 |
Изобретение относится к устройствам предотвращения дремоты водителя транспорта. Технический результат заключается в повышении надежности и интеллектуальных свойств системы за счет одновременного учета психофизиологического состояния водителя, моторики его действий при управлении транспортом, а также оперативного учета внешних факторов, в которых находится водитель. Результат достигается за счет того, что перчатка дополнительно содержит датчик освещенности, микрофон шумовой обстановки, трехкоординатный акселерометр, сигнальный RGB-индикатор, USB-порт. Звуковой сигнализатор содержит генератор звуковой информации с динамиком, блок памяти, тактильный вибрационный сигнализатор. Орган управления включает кнопку подтверждения бдительности, сенсорный регулятор индивидуальной чувствительности, сенсорный регулятор громкости звуковой информации динамика. Тактильный вибрационный сигнализатор выполнен в виде вибромотора и прикреплен к внутренней поверхности пальцево-ладонной стенки оболочки с возможностью контакта с боковой поверхностью основной фаланги второго пальца со стороны первого межпальцевого промежутка. Кнопка подтверждения бдительности прикреплена на той же боковой поверхности со стороны средней фаланги второго пальца дистальнее вибрационного сигнализатора с возможностью нажатия кнопки первым пальцем той же руки. 8 з.п. ф-лы, 16 ил.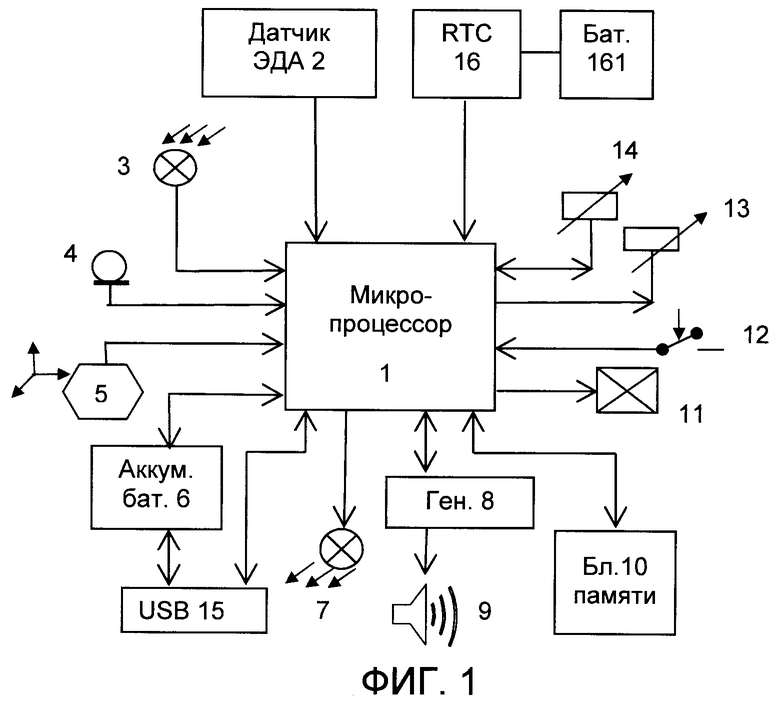
1. Интеллектуальная перчатка для водителя транспорта, препятствующая дремоте за рулем, содержащая
размещенные в корпусе микроконтроллер, связанные с ним орган управления, звуковой сигнализатор и аккумуляторная батарея источника питания,
оболочку перчатки из тканого материала с тыльной и пальцево-ладонной стенками,
датчик электродермальной активности, имеющий электроды, установленные на внутренней поверхности пальцево-ладонной стенки оболочки с возможностью гальванической связи с кожным покровом руки водителя и подключенные к сигнальным входам микроконтроллера, управляющий выход которого подключен к звуковому сигнализатору, отличающаяся тем, что
дополнительно содержит связанный с микроконтроллером датчик освещенности, микрофон шумовой обстановки, трехкоординатный акселерометр, сигнальный RGB-светодиод, блок памяти, USB-порт для подключения к зарядному устройству или персональному компьютеру, звуковой сигнализатор содержит генератор звуковой информации с динамиком, тактильный вибрационный сигнализатор, орган управления включает кнопку подтверждения бдительности, сенсорный регулятор индивидуальной чувствительности, сенсорный регулятор громкости звуковой информации динамика, при этом тактильный вибрационный сигнализатор выполнен в виде вибромотора и прикреплен к внутренней поверхности пальцево-ладонной стенки оболочки с возможностью контакта с боковой поверхностью основной фаланги второго пальца со стороны первого межпальцевого промежутка, а кнопка подтверждения бдительности прикреплена на той же боковой поверхности со стороны средней фаланги второго пальца дистальнее вибрационного сигнализатора с возможностью нажатия кнопки первым пальцем той же руки.
2. Устройство по п.1, отличающееся тем, что внешняя оболочка перчатки дублирована профилированной накладкой из неэластичного антифрикционного материала таким образом, что накладка охватывает ладонную часть пальцево-ладонной стенки, первый межпальцевый промежуток со стороны оболочки для второго пальца и тыльную пястную часть стенки, при этом вибромотор, кнопка и электрические соединительные проводники размещены между оболочкой и накладкой, а корпус прикреплен к накладке.
3. Устройство по п.1, отличающееся тем, что корпус выполнен в форме полого диска, одним основанием прикрепленным к тыльной стенке оболочки, при этом на другом его основании размещены сенсорные регуляторы индивидуальной чувствительности и громкости звуковой информации, установленные с возможностью управления другой рукой, сигнальный RGB-индикатор, датчик освещенности и микрофон, а в полости диска - микроконтроллер, акселерометр, аккумуляторная батарея, генератор звуковой информации и динамик, при этом разъем USB-порта размещен на боковой поверхности корпуса.
4. Устройство по п.1, отличающееся тем, что электроды выполнены из тканого электропроводного волокна и размещены на внутренней поверхности пальцево-ладонной стенки оболочки в зоне покрытия проксимальных фаланг пальцев, имеют форму двух протяженных полосок, размещенных с зазором параллельно одна другой по длине каждой оболочки.
5. Устройство по п.1, отличающееся тем, что тканый материал представляет собой эластичный паропроницаемый материал.
6. Устройство по п.2, отличающееся тем, что накладка из неэластичного антифрикционного материала представляет собой искусственную кожу.
7. Устройство по п.1, отличающееся тем, что микроконтроллер выполнен с возможностью регистрации сигналов КГР, подавления импульсных помех, выделения сигнала в полосе фазических составляющих электродермальной активности и детектирования импульсов фазических составляющих.
8. Устройство по п.1, отличающееся тем, что комплект включает две интеллектуальных перчатки или одну интеллектуальную перчатку и одну оболочку перчатки для другой руки.
9. Устройство по п.1, отличающееся тем, что генератор звуковой информации представляет цифровой аудиопроигрыватель по типу mp3-плеера.
| СПОСОБ РЕГИСТРАЦИИ КОЖНО-ГАЛЬВАНИЧЕСКИХ РЕАКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2107460C1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ БОДРСТВОВАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2200095C1 |
| JP 60139539 А, 24.07.1985 | |||
| US 7688213 В2, 30.03.2010 | |||
| US 6172610 В1, 09.01.2001 | |||
| ОДНОВРЕМЕННАЯ ОПТИМИЗАЦИЯ МУЛЬТИМОДАЛЬНОЙ ИНВЕРСИИ ДЛЯ ПЛАНИРОВАНИЯ РАДИОТЕРАПЕВТИЧЕСКОГО ЛЕЧЕНИЯ | 2011 |
|
RU2605998C2 |

