Изобретение относится к области полимерного машиностроения и предназначено для использования в двухшнековых экструдерах с однонаправленным вращением шнеков.
Известен привод двухшнекового экструдера, см. а.с. СССР №720242, кл. F 16 H 1/20, заявл. 13.06.75 г., опубл. 10.03.80 г.
Известный привод для каждого шнекового вала содержит ведущий вал с зубчатым колесом, которое сцеплено с двумя паразитными зубчатыми колесами, расположенными диаметрально противоположно друг другу, а эти колеса сцеплены с другой парой паразитных зубчатых колес, которые приводят во вращение ведомое колесо, сидящее на приводном валу шнекового вала.
Таким образом, создаются два потока передачи момента (верхний и нижний) от ведущего вала к ведомому через две пары паразитных зубчатых колес.
С целью выравнивания нагрузок в этих двух потоках каждая верхняя и нижняя пары паразитных колес сидят в двух кассетах. Каждая из кассет шарнирно закреплена на оси, которая крепится в корпусе и одновременно является осью одного из колес, при этом если ось верхней кассеты проходит через правое паразитное колесо, то ось нижней - через левое. Обе кассеты соединены регулируемой тягой, проходящей через середину кассет.
Такое исполнение, являясь статически определимой системой, обеспечивает идеальное выравнивание моментов, передаваемых через верхнюю и нижнюю ветви.
Недостатком известной конструкции является то, что при таком исполнении недопустимо наличие осевых нагрузок на кассету, так как они приводят к перекосу кассеты и соответственно осей паразитных зубчатых колес относительно осей ведущего и ведомого валов. Поэтому все зубчатые колеса должны выполняться с прямыми зубьями, что снижает нагрузочную способность по сравнению с колесами с косыми зубьями.
Другим недостатком этого решения является сложность конструкции. Помимо двух кассет с восемью зубчатыми колесами (по четыре на каждую кассету) необходим привод ведущих валов, располагающийся в другой плоскости.
Из известных приводов двухшнекового экструдера наиболее близким по технической сущности является привод, описанный в патенте РСТ № WO 93/24767, кл. F 16 H 1/22, заявл. 19.05.93 г., опубл. 9.12.93 г.
Этот привод двухшнекового экструдера содержит входной вал, установленные в опорных подшипниках скольжения два выходных вала с приводными косозубыми колесами, по два паразитных косозубых зубчатых колеса на каждый выходной вал, расположенных параллельно выходным валам и противолежащих друг другу по 120°, и по одному приводному зубчатому колесу, сцепленному с каждой парой паразитных колес. Каждая пара паразитных зубчатых колес сцеплена с приводными зубчатыми колесами выходных валов. Привод двухшнекового экструдера осуществляется посредством пары двигателей, распределяющих крутящий момент от каждого входного вала на каждый выходной вал.
Недостатком известной конструкции привода двухшнекового экструдера является наличие значительного радиального усилия на подшипники выходных валов. При угле в 120° между осями промежуточных зубчатых колес, как это следует из патента, радиальное усилие на подшипники равно 2Мв/dв, где Мв - крутящий момент на выходном валу, dв - диаметр зубчатого колеса на этом валу. Учитывая, что эти подшипники крайне ограничены габаритами, наличие большого радиального усилия снижает их надежность, долговечность и нагрузочную способность всего привода в целом.
Другим недостатком известной конструкции является высокая стоимость привода, поскольку два двигателя с половинной мощностью каждый и с системой регулирования дороже одного.
Задача настоящего изобретения состоит в создании привода двухшнекового экструдера, позволяющего повысить надежность, долговечность и нагрузочную способность за счет обеспечения равномерной двухсторонней передачи момента на шнековые валы, а также позволяющего снизить стоимость его изготовления.
Поставленная задача достигается тем, что в приводе двухшнекового экструдера, содержащего входной вал, установленные в опорных подшипниках скольжения два выходных вала с приводными ведомыми косозубыми колесами, по два паразитных косозубых зубчатых колеса на каждый выходной вал, сцепленных с зубчатыми колесами этих валов, и по одному приводному ведущему зубчатому колесу, сцепленному с каждой парой паразитных колес, согласно изобретению, каждый выходной вал выполнен самоустанавливающимся и его опорные подшипники скольжения выполнены с радиальным зазором, меньшим, чем минимальный гарантированный боковой зазор в зацеплении, но большим, чем суммарная упругая деформация паразитных зубчатых колес, приведенная к боковому зазору:
δΣ<Δr<jmin/sin2αt,
при этом δΣ=2Рλ·sinϕп·sin2αt,
где Δr - радиальный зазор в подшипнике,
δΣ - суммарная упругая деформация паразитных зубчатых колес, приведенная к боковому зазору,
jmin - минимальный гарантированный боковой зазор в зацеплении,
αt - угол профиля в торцевом сечении,
М - момент, передаваемый зубчатым паразитным колесом,
D - диаметр зубчатого паразитного колеса,
ϕп - угол между отрезками прямых, соединяющих центр паразитного колеса с центрами ведомого и приводного колес,
λ - суммарная податливость зубчатого паразитного колеса.
Кроме того, одно из паразитных косозубых зубчатых колес в каждой паре расположено симметрично относительно выходных валов, а другое диаметрально противоположно упомянутому, причем ось ведомого колеса установлена на прямой, соединяющей центры паразитных колес, а то паразитное колесо, у которого при заданном направлении вращения ведущий и ведомый профили зубьев обращены навстречу друг другу, установлено на своей оси с эксцентриситетом е=0,5-1,5 мм. Число зубьев ведомого колеса выполнено четным и связано с числами зубьев паразитных колес и приводного ведущего колеса соотношениями:
2(z5+zп)ϕ5=(zп+2n)π,
(z5+zп+2у5пcosβ)sinϕ5=zп+z2+2уп2cosβ,
(z5+zп+2у5пcosβ)cosϕ5>z2+z5+2(2h*a+у5п+уп2-2хп)cosβ,
где z2 - число зубьев ведомого колеса,
zп - число зубьев паразитных колес,
z5 - число зубьев ведущего колеса,
ϕ5 - угол между отрезками прямых, соединяющих центр приводного ведущего колеса с центрами паразитных колес,
n - произвольное целое число,
у5п и уп2 - коэффициенты воспринимаемого смещения в зацеплении приводного ведущего и паразитного колес и паразитного и приводного ведомого колес соответственно, которые должны удовлетворять условиям 0≤y5п≤yп2≤1,
хп - коэффициент смещения исходного контура для паразитного колеса,
h*a - коэффициент высоты головки зубьев (h*а=0,8-1,0),
β - делительный угол наклона зубьев.
Такое конструктивное выполнение привода двухшнекового экструдера позволит повысить его надежность, долговечность и нагрузочную способность. Это достигается за счет равномерной передачи крутящего момента на каждый выходной вал и выполнения выходного вала самоустанавливающимся. Кроме того, в предложенном приводе используется один двигатель, что снижает его стоимость.
Для пояснения изобретения ниже приводится конкретный пример выполнения изобретения со ссылкой на прилагаемые чертежи, на которых:
на фиг.1 изображена кинематическая схема привода двухшнекового экструдера;
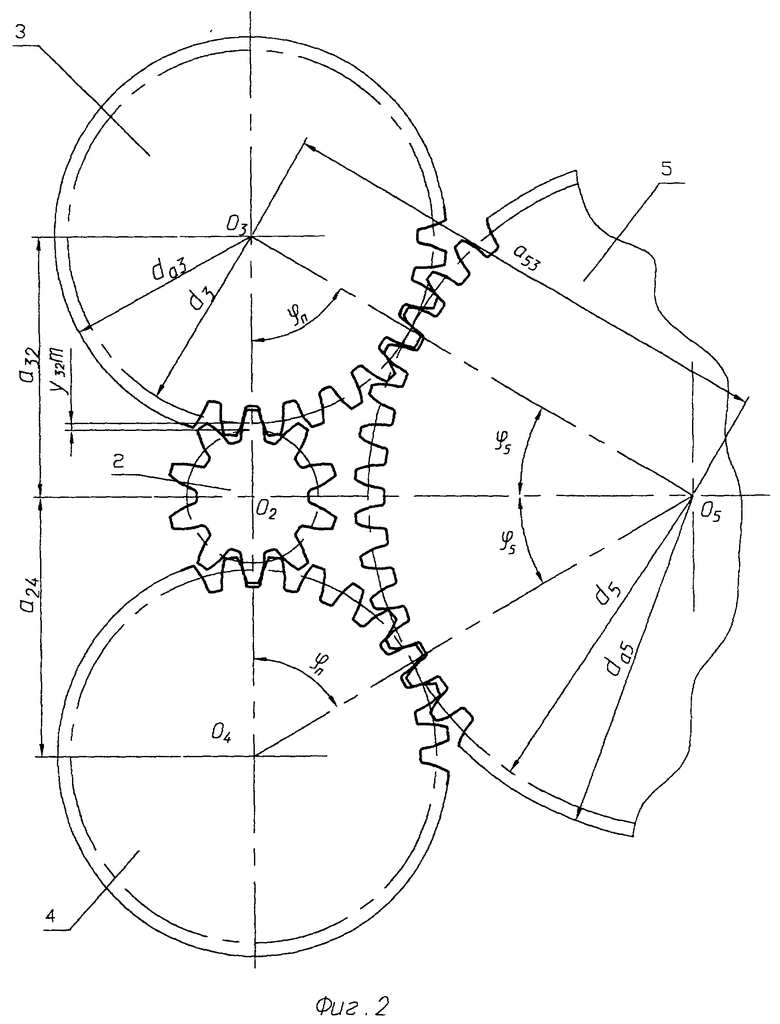
на фиг.2 изображена схема, поясняющая расчет параметров зацеплений пары паразитных колес ведомого колеса и приводного;
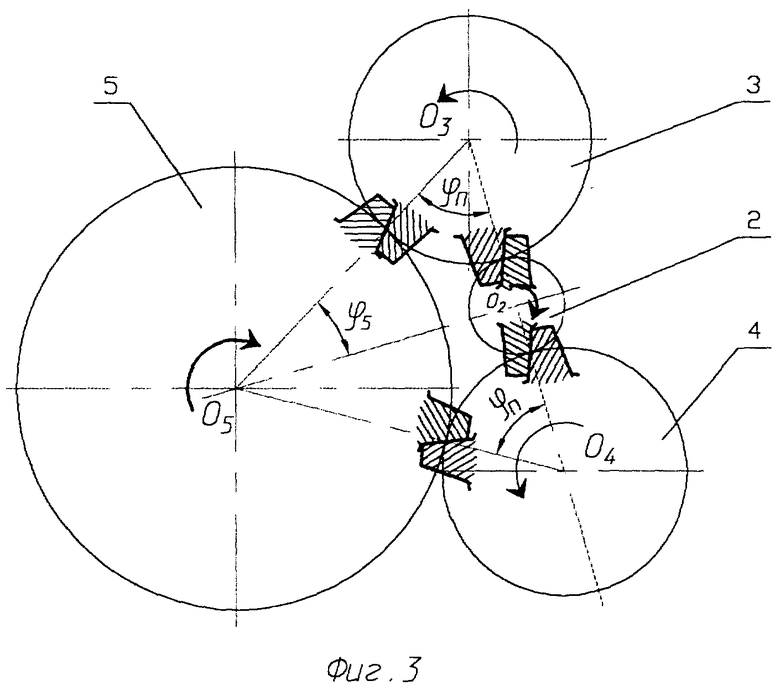
на фиг.3 изображена схема зацеплений колес 2, 3, 4, 5 для левой стороны привода;
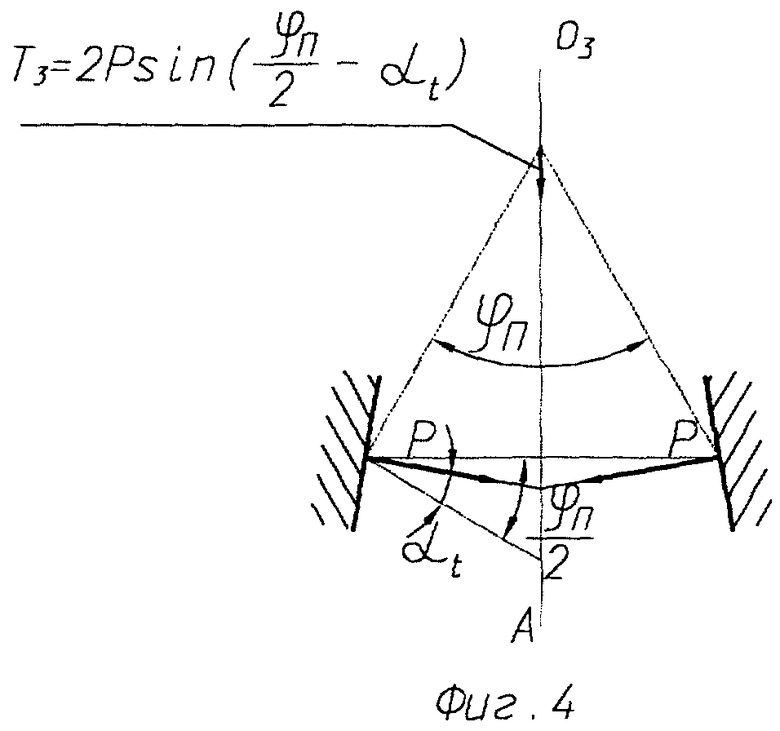
на фиг.4 - схема сил, действующих на паразитное колесо 3 по схеме на фиг.3;
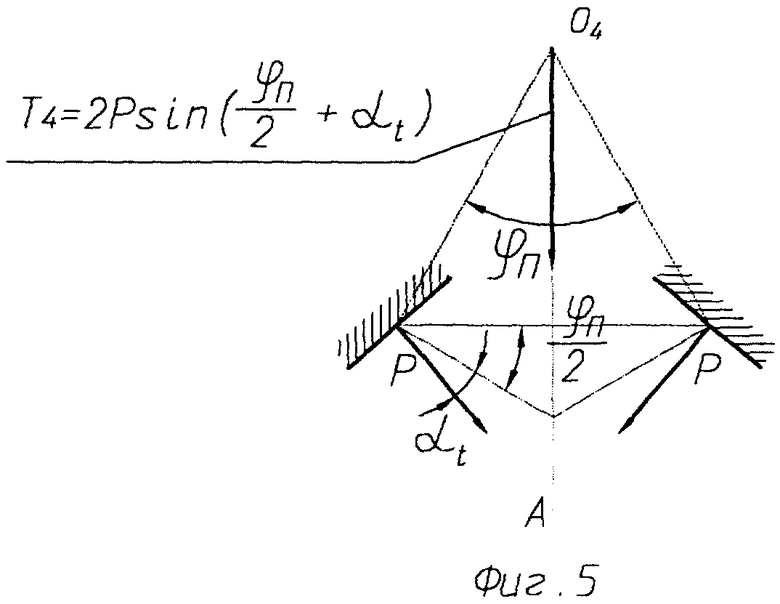
на фиг.5 - схема сил, действующих на паразитное колесо 4 по схеме на фиг.3;
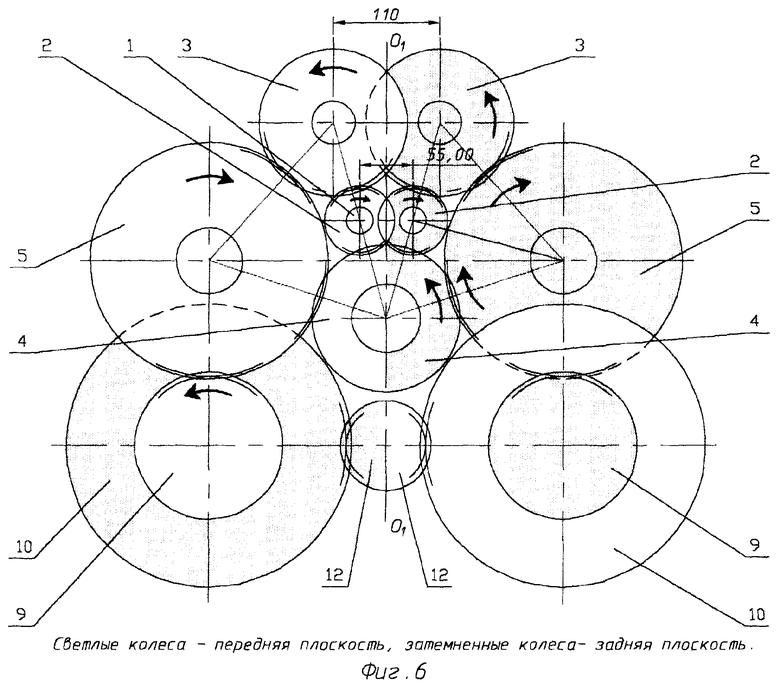
на фиг.6 - конкретное исполнение привода для расстояния между валами а=55 мм и максимальным крутящим моментом на каждом выходном валу по 1000 Нм.
Привод двухшнекового экструдера содержит два выходных вала 1 с приводными ведомыми косозубыми колесами 2, расположенными в разных плоскостях по два паразитных косозубых зубчатых колеса 3, 4 на каждый выходной вал, сцепленных с зубчатыми колесами 2 этих валов, и по одному приводному ведущему зубчатому колесу 5, сцепленному с каждой парой паразитных колес 3, 4. Колесо 4 расположено на вертикальной оси O-O симметрии привода, то есть на равных расстояниях от осей валов 1, а колесо 3 расположено диаметрально противоположно колесу 4, то есть на линии, соединяющей оси колес 2, 4. Колеса 3, 4 имеют равное количество зубьев. Ось приводного ведомого косозубого колеса 2 установлена на прямой, соединяющей центры паразитных колес 3, 4. Каждый выходной вал 1 установлен на опорных подшипниках скольжения 6. Одно из каждой пары паразитных колес 3, 4, а именно то, у которого при заданном направлении вращения ведущий и ведомый профили зубьев обращены друг к другу, установлено на своей оси 7 с эксцентриситетом e=0,5-1,5 мм, а другое - на оси 8. Каждое колесо 5 через промежуточную пару зубчатых колес 9, 10 приводится от ведущего вала 11 с зубчатыми колесами 12. Валы 1 через муфты 13 связаны со шнековыми валами экструдера 14. Все зубчатые колеса выполнены косозубыми эвольвентными корригированными.
Привод двухшнекового экструдера работает следующим образом.
От каждого зубчатого колеса 12 входного вала 11 через промежуточную пару зубчатых колес 9, 10 вращающийся момент передается на приводное зубчатое колесо 5, находящееся в зацеплении с парой паразитных зубчатых колес 3, 4, которые приводят во вращение ведомое зубчатое колесо 2 и выходной вал 1. Валы 1 через муфты 13 приводят во вращение шнековые валы экструдера 14.
Как видно из схемы фиг.1, для обеспечения одновременного зацепления колес 2, 3, 4 и 5 требуется выполнение определенных условий, которые рассмотрены ниже (см. фиг.2).
Во-первых, в замкнутой цепи зубчатых колес 2-3-5-4-2 должно соблюдаться условие сцепляемости. Если число зубьев зубчатого колеса 2 четное, то в силу симметрии верхней и нижней ветвей привода это условие сводится к следующему. Угол ϕп, заключенный между межосевыми линиями O2O3 и О3O5, а также между O2O4 и O4O5, содержит nп=zп·ϕп/2π угловых шагов колеса 3 или 4, а угол ϕ5 между линиями O2O5 и О3O5 n5=z5·ϕ5/2π угловых шагов колеса 5,
где nп - количество угловых шагов колеса 3 или 4,
n5 - количество угловых шагов колеса 5,
zп - число зубьев колеса 3 или 4,
z5 - число зубьев колеса 5. Сами по себе числа nп и n5 могут быть дробными, но либо они должны быть равны между собой, либо их удвоенная разность должна быть целым числом n, то есть

В то же время угол ϕп=π/2-ϕ5.
Подставляя это значение ϕп в выражение (1), после преобразований получаем

Во-вторых, в прямоугольных треугольниках O2O3O5 и O2O4O5 межосевые расстояния а32=О3O2 и а53=О5О3, а также а42=O4O2 и а54=О5O4 связаны между собой зависимостью

Далее для простоты рассматриваем зависимости для треугольника О2О3О5, которые для треугольника O2O4O5 будут аналогичны.
Межосевые расстояния в косозубых эвольвентных корригированных передачах определяются известными выражениями


где z2 - число зубьев ведомого колеса,
zп - число зубьев паразитных колес,
z5 - число зубьев ведущего колеса,
mn - нормальный модуль,
β - делительный угол наклона зубьев,
yп2 и y5п - коэффициенты воспринимаемого смещения в зацеплениях паразитного и приводного ведомого колес 3-2 и приводного ведущего и паразитного колес 5-3 соответственно, причем во избежание подрезания или заострения, а также учитывая, что зубчатое колесо 5 заведомо больше зубчатого колеса 2, коэффициенты должны выбираться в пределах 0≤y5п≤yп2≤1.
Подставляя выражения (4), (5) в условие (3) и сокращая обе части выражения на величину mn, получаем окончательно

В-третьих, между вершинами зубьев колес 2 и 5 должен сохраняться некоторый минимальный зазор, то есть расстояние между центрами O2O5=а53·cosϕ5 должно быть больше полусуммы диаметров вершин зубьев:

где 

h*a - коэффициент высоты головки зубьев исходного контура (h*a=0,8-1,0);
xп - коэффициент смещения исходного контура для паразитных колес 3 или 4.
Подставляя (5), (8) и (9) в условие (7), получаем:

В том случае, если валы 1 устанавливаются в жестких подшипниках качения, блок колес 2, 3, 4, 5 также оказывается системой статически неопределимой со всеми присущими ей недостатками, а именно: возможные отклонения в изготовлении расточек корпуса привода и зубчатых колес, даже в пределах допусков, неизбежно влекут за собой неравномерное распределение передаваемых моментов по цепям 5-3-2 и 5-4-2.
Кроме того, как можно видеть из схемы на фиг.3, где показана левая сторона привода из колес 5, 3, 4, 2, силы, действующие на колеса 3 и 4, отличаются одна от другой. На верхнее колесо 3 (фиг.4) результирующая радиальная сила от передаваемого момента определяется выражением
а на колесо 4 (фиг.5)
соответственно оказываются различными и деформации на этих колесах,
где 
М - момент, передаваемый зубчатыми колесами 3, 4;
D - их диаметр;
αt - угол зацепления в торцевом сечении;
ϕп - угол, заключенный между межосевыми линиями О2О3 и О3O5 или O2O4 и O4O5 (см. фиг.2).
Для устранения статической неопределимости и обеспечения равного распределения общего крутящего момента по обоим зацеплениям 3-2 и 4-2 валы 1 устанавливаются в подшипниках скольжения 6 с гарантированным зазором больше разности упругих деформаций обоих колес 3 и 4, которая включает упругие деформации осей этих колес, зубьев и подшипников качения на осях 7 и 8. Эта величина результирующей упругой деформации должна быть приведена к изменению бокового зазора. Если податливость колес 3 и 4 от деформации осей и подшипников λ, то перемещение колес по биссектрисам О3А и О4А углов ϕп будет соответственно
а изменения в боковом зазоре
После преобразований получаем
δΣ=2Рλsinϕп·sin2αt, где δΣ - суммарная упругая деформация паразитных зубчатых колес, приведенная к боковому зазору.
Таким образом, радиальный зазор в подшипниках 6 должен отвечать условию
δΣ<Δr<jmin/sin2αt, при этом δΣ=2Рλ·sinϕп·sin2αt.
На фиг.6 показан конкретный пример исполнения привода двухшнекового экструдера.
Расстояние между выходными валами а=55 мм, момент на каждый вал М1=103 Нм.
Усилие на зуб

где M1=106 Нмм, z2=18 - число зубьев колеса 2, m=3,5 - модуль.
Зубчатые колеса установлены на осях диаметром 50 мм с подшипниками 3610.
Податливость оси λо=1,36·10-6 мм/Н, средняя податливость подшипника (см. Бейзельман Р.Д., Ципкин Б.В. "Подшипники качения") λп=0,8·10-6 мм/Н, податливость зубьев (изгиб, сдвиг, контактная деформация) λ35=0,3·10-6 мм/Н.
Суммарная податливость λ=2,46·10-6 мм/Н.
Изменение зазоров от деформации
δΣ=2·16,6·103·2,46·10-6·sin56,6°·sin40°=0,044 мм.
Здесь угол профиля в торцевом сечении αt условно принят в 20°. Таким образом, радиальный зазор в подшипниках валов 1 должен быть больше, чем 0,05 мм.
Другой стороной проблемы при таком конструктивном исполнении является необходимость ограничить возможность смещения зубчатого колеса 2 вдоль профилей зубьев колес 3 и 4 до полной выборки минимального бокового зазора jmin.
При гарантированном минимальном боковом зазоре jmin допустимое радиальное перемещение колеса должно быть меньше, чем
Например, для конкретного примера, показанного на фиг.6, согласно нормам точности для зубчатых передач по ГОСТ 1643-83 при сопряжении С минимальный гарантированный боковой зазор для межцентровых расстояний А=80-125 мм составляет jmin=0,087 мм. Таким образом, максимальное допустимое радиальное смещение колеса 2 составит
а для сопряжения D jmin=0,054 мм и допустимое максимальное смещение колеса будет
Таким образом, радиальный зазор в подшипниках должен находиться в пределах 0,04 мм<Δr<0,25÷0,16 мм в зависимости от типа сопряжения.
В конкретном случае он выбран
Δr=0,08÷0,1 мм.
Для исключения влияния ошибок при изготовлении, например при выполнении расточек корпуса привода, одна из осей в паре колес 3 и 4 выполнена с эксцентриком, причем, как можно видеть из схемы на фиг.3, наиболее эффективна ее установка на том колесе, где движение зубьев колеса происходит от ведомого колеса 2 к ведущему колесу 5, то есть там, где при заданном направлении вращения ведущий и ведомый профили зубьев обращены друг к другу. При заданном направлении вращения на фиг.1 на левой стороне привода это нижнее колесо 4, а на правой - это верхнее колесо 3.
Регулируя положения эксцентрика, достигают точного расположения ведомого вала 1 по теоретической оси привода. Его смещение во время работы будет происходить в пределах упругих деформаций колес 3 и 4 и подшипников.
Так, например, для конкретного примера предельное отклонение межосевого расстояния согласно ГОСТ 1643-83 составит для сопряжения С fa=±0,05 мм, сопряжения D fa=±0,03 мм. Таким образом, при эксцентриситете e=0,8 мм угол поворота эксцентрика будет в пределах
Предложенный согласно изобретению привод двухшнекового экструдера позволяет обеспечить равномерную передачу момента от двух паразитных зубчатых колес на ведомое колесо, то есть по половине с каждого зубчатого колеса при минимальном числе зацеплений в целом по приводу, что снижает потери мощности и повышает нагрузочную способность привода.
Кроме того, предлагаемое исполнение привода удешевляет стоимость его изготовления.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛИТЕЛЬНАЯ КОРОБКА ДВУХШНЕКОВОГО ЭКСТРУДЕРА, ПРИВОД ДВУХШНЕКОВОГО ЭКСТРУДЕРА И ДВУХШНЕКОВЫЙ ЭКСТРУДЕР | 2006 |
|
RU2328638C1 |
| Привод двухшнекового экструдера | 1984 |
|
SU1196067A1 |
| РЕДУКТОР ВЕРТОЛЕТА СООСНОЙ СХЕМЫ | 2006 |
|
RU2309874C1 |
| РАСПРЕДЕЛИТЕЛЬНАЯ КОРОБКА ДВУХШНЕКОВОГО ЭКСТРУДЕРА, ПРИВОД ДВУХШНЕКОВОГО ЭКСТРУДЕРА И ДВУХШНЕКОВЫЙ ЭКСТРУДЕР | 2004 |
|
RU2286493C2 |
| ДВУХКОНТУРНЫЙ ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2349784C2 |
| УСТРОЙСТВО К ТОКАРНОМУ СТАНКУ ДЛЯ НАРЕЗАНИЯ ГЛОБОИДНЫХ ЧЕРВЯКОВ | 1996 |
|
RU2101139C1 |
| РЕДУКТОР | 1990 |
|
RU2018743C1 |
| РЕДУКТОР ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2106508C1 |
| МУЛЬТИПЛИКАТОР ДЛЯ ТУРБОМАШИНЫ | 2002 |
|
RU2228454C2 |
| Двухступенчатый редуктор верхнего силового привода буровой установки | 2016 |
|
RU2646289C1 |
Изобретение относится к области полимерного машиностроения и предназначено для использования в двухшнековых экструдерах с однонаправленным вращением шнеков. Отличительной частью привода двухшнекового экструдера является то, что каждый выходной вал выполнен самоустанавливающимся и то, что опорные подшипники скольжения выходных валов выполнены с радиальным зазором (Δr) меньшим, чем минимальный гарантированный боковой зазор в зацеплении (jmin), но большем, чем суммарная упругая деформация паразитных колес (δΣ), приведенная к боковому зазору: δΣ<Δr<jmin/sin2αt, при этом
δΣ=2Pλ·sinϕп·sin2αt,
где αt - угол профиля в торцевом сечении, М - момент, передаваемый паразитным колесом, D - диаметр паразитного колеса, ϕп - угол между отрезками прямых, соединяющих центр паразитного колеса с центрами ведомого и ведущего зубчатых колес, λ - суммарная податливость паразитного колеса. Одно из паразитных колес в каждой паре расположено симметрично относительно выходных валов, а другое - диаметрально противоположно упомянутому. Причем ось ведомого колеса установлена на прямой, соединяющей центры паразитных колес. То паразитное колесо, у которого при заданном направлении вращения ведущий и ведомый профили зубьев обращены навстречу друг другу, установлено на своей оси с эксцентриситетом е=0,5-1,5 мм. В результате достигается создание привода двухшнекового экструдера, позволяющего повысить надежность, долговечность и нагрузочную способность за счет обеспечения равномерной двухсторонней передачи момента на шнековые валы, а также позволяющего снизить стоимость его изготовления. 1 з.п. ф-лы, 6 ил.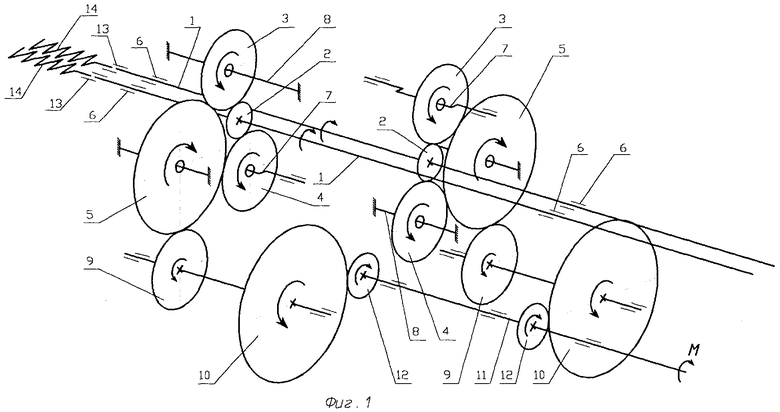
δΣ<Δr<jmin/sin2αt, при этом δΣ=2Pλ·sinϕп·sin2αt,
 ,
,
где Δr - радиальный зазор в опорном подшипнике скольжения;
δΣ - суммарная упругая деформация паразитных косозубых зубчатых колес, приведенная к боковому зазору;
jmin - минимальный гарантированный боковой зазор в зацеплении;
αt - угол профиля в торцевом сечении;
М - момент, передаваемый паразитным косозубым зубчатым колесом;
D - диаметр паразитного косозубого зубчатого колеса;
ϕп - угол между отрезками прямых, соединяющих центр паразитного косозубого зубчатого колеса с центрами приводного ведомого косозубого и приводного ведущего зубчатых колес;
λ - суммарная податливость паразитного косозубого зубчатого колеса, кроме того, одно из паразитных косозубых зубчатых колес в каждой паре расположено симметрично относительно выходных валов, а другое диаметрально противоположно упомянутому, причем ось приводного ведомого косозубого зубчатого колеса установлена на прямой, соединяющей центры паразитных косозубых зубчатых колес, а то паразитное косозубое зубчатое колесо, у которого при заданном направлении вращения ведущий и ведомый профили зубьев обращены навстречу друг другу, установлено на своей оси с эксцентриситетом е=0,5-1,5 мм.
2(z5+zп)ϕ5=(zп+2n)π,
(z5+zп+2y5пcosβ)sinϕ5=zп+z2+2yп2cosβ,
(z5+zп+2y5пcosβ)cosϕ5>z2+z5+2(2h*a+y5п+yп2-2xп)cosβ,
где z2 - число зубьев приводного ведомого косозубого зубчатого колеса;
zп - число зубьев паразитных косозубых зубчатых колес;
z5 - число зубьев приводного ведущего зубчатого колеса;
ϕ5 - угол между отрезками прямых, соединяющих центр приводного ведущего зубчатого колеса с центрами паразитных косозубых зубчатых колес;
n - произвольное целое число;
y5п и yп2 - коэффициенты воспринимаемого смещения в зацеплении приводного ведущего и паразитного косозубого зубчатых колес и паразитного и приводного ведомого косозубых зубчатых колес соответственно, которые должны удовлетворять условиям
0≤y5п≤yп2≤1,
xп - коэффициент смещения исходного контура для паразитного косозубого зубчатого колеса;
h*a - коэффициент высоты головки зубьев (h*a=0,8-1,0);
β - делительный угол наклона зубьев.
| WO 9324767 A1, 09.12.1993 | |||
| GB 1374543 A, 20.11.1974 | |||
| GB 1431330 A, 07.04.1976 | |||
| Многопоточная зубчатая передача | 1986 |
|
SU1555568A1 |
| Экструдер для переработки полимерных материалов | 1990 |
|
SU1775305A1 |

