Предложение относится к машиностроению, в частности к редукторам вертолетов.
Известен главный редуктор Р-26 вертолета соосной схемы, содержащий ведущий вал с ведущим колесом, внутренний ведомый вал с малым колесом, наружный ведомый вал с большим колесом и переборную ступень с паразитными валами, каждый из которых содержит большое паразитное колесо, сцепленное с большим колесом наружного ведомого вала, и малое паразитное колесо, сцепленное с малым колесом внутреннего ведомого вала [1].
Недостатком известного устройства является его малый ресурс из-за передачи всего потока мощности через одно ведущее колесо.
Известен также главный редуктор вертолета соосной схемы, содержащий входной вал с ведущим колесом, два соосных выходных вала с ведомыми колесами, промежуточные соосные валы, на каждом из которых закреплены колеса, сцепленные с ведомыми колесами выходных валов, и колеса, сцепленные с ведущим колесом входного вала [2].
Недостатком данного устройства является то, что он применим для силовых установок вертолетов малой мощности (один двигатель в 600 л. с.). Его невозможно выполнить с малыми габаритами из-за однопоточной передачи мощности к каждому ведомому валу.
Наиболее близким по технической сущности и достигаемому результату к заявляемому решению является главный редуктор РВ-3Ф вертолета Ка-25 с соосными валами винтов [3].
Редуктор содержит ведущий вал, два ведомых вала, внутренний и наружный, кинематически связанные между собой переборный и планетарный механизмы. Каждый из механизмов включает солнечное колесо на ведущем валу и эпицикл на наружном ведомом валу. При этом переборный механизм содержит паразитные блоки, установленные в неподвижном корпусе, а планетарный механизм имеет сателлиты, помещенные в водило, жестко закрепленное на внутреннем ведомом валу.
Недостатками известного устройства являются сложность изготовления и трудность сборки и разборки корпуса переборного механизма и входящих в него паразитных блоков. Непосредственно корпус паразитных блоков состоит из трех труднособираемых узлов и не имеет жесткого крепления.
При сборке введение в зацепление колес паразитных блоков с соответствующими колесами ведущего и ведомого валов возможно только при строгой ориентации друг относительно друга. Колеса ведущего и наружного ведомого валов выполнены с числами зубьев (57 и 107 зубьев), которые некратны количеству паразитных блоков (6 штук). Это вынуждает при сборке редуктора маркировать зубья колес паразитных блоков. При этом помимо зубьев колес в данной конструкции нужно совмещать еще и многочисленные расточки корпусов, поэтому собрать такой механизм достаточно сложно.
Сложность изготовления состоит в получении одинаковой угловой ориентации колес всех паразитных блоков из-за выполнения их с прямыми зубьями.
Технический результат заявляемого решения заключается в создании редуктора для мощных вертолетов простого по конструкции и удобного при сборке, позволяющего при этом получить равные встречные обороты соосных валов.
Для достижения указанного технического результата в редукторе вертолета соосной схемы, содержащем ведущий вал, два коаксиально расположенных ведомых вала, внутренний и наружный, кинематически связанные между собой переборный и планетарный механизмы, каждый из которых включает солнечное колесо на ведущем валу и эпицикл на наружном ведомом валу, при этом переборный механизм содержит паразитные блоки, установленные в неподвижном корпусе, а планетарный механизм имеет сателлиты, помещенные в водило, жестко закрепленное на внутреннем ведомом валу, согласно предложению количество сателлитов больше на единицу количества паразитных блоков, при этом число зубьев солнечного колеса и эпицикла переборного механизма кратно количеству паразитных блоков, в то же время сумма чисел зубьев этих же элементов в планетарном механизме кратна количеству сателлитов, а передаточные отношения механизмов связаны выражением:
iпереб=2iпланет+1, где
iпереб - передаточное отношение переборного механизма;
iпланет - передаточное отношение планетарного механизма.
Также согласно предложению каждый паразитный блок включает косозубое колесо, жестко соединенное с прямозубым колесом посредством шлиц, которые выполнены как продолжение зубьев прямозубого колеса, срезанных по высоте, причем число зубьев косозубого колеса кратно числу зубьев прямозубого колеса. При этом каждый паразитный блок выполнен с возможностью фиксации в осевом положении и с опорой на корпус посредством подшипников, шарикового радиально-упорного и роликового, внутренняя обойма которого выполнена заодно с прямозубым колесом этого блока.
Наличие отличительных признаков, а именно выполнение устройства с количеством сателлитов, превышающим на единицу количество паразитных блоков, кратность числа зубьев солнечного колеса и эпицикла переборного механизма количеству паразитных блоков, кратность суммы чисел зубьев солнечного колеса и эпицикла планетарного механизма количеству сателлитов, выбор передаточных отношений механизмов в соответствии с выражением:
iпереб=2iпланет+1, где
iпереб - передаточное отношение переборного механизма,
iпланет - передаточное отношение планетарного механизма,
свидетельствует о соответствии заявляемого технического решения критерию патентоспособности «новизна».
Задача подбора кинематической схемы понижающей передачи (редуктора) для получения встречного вращения винтов вертолета с равным числом оборотов достаточно сложна, так как при этом необходимо учитывать множество предъявляемых к такой конструкции математических, конструктивных и производственных требований. В связи с этими жесткими требованиями понижающие передачи, например редуктор, представленный в прототипе, выполняют с одинаковым числом сателлитов и паразитных блоков (в прототипе - 6).
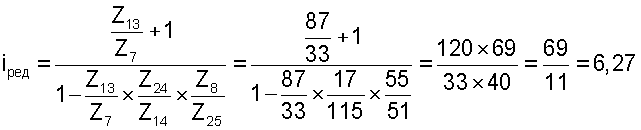
Известно, что общий вес многоступенчатой передачи обратно пропорционален передаточному отношению замыкающей планетарной ступени. Передаточное отношение предлагаемого редуктора выше, чем у прототипа (6,273 против 5,632). При этом за счет определенного рационального сочетания числа зубьев, количества сателлитов и паразитных блоков удалось не только снизить вес редуктора, но и значительно упростить конструкцию. Оптимально подобранное сочетание передаточных отношений переборного и планетарного механизмов позволило убрать один из паразитных блоков, как следствие появилась возможность изготовления корпуса из двух жестких узлов, стянутых мощными призонными болтами, расположенными на окружности центров паразитных блоков. Таким образом, значительно снизилась трудоемкость сборки и разборки редуктора.
При сборке переборного и планетарного механизмов редуктора кратность чисел зубьев солнечного колеса и эпицикла числу паразитных блоков и кратность суммы чисел зубьев солнечного колоса и эпицикла числу сателлитов позволяет устанавливать их в произвольном положении без предварительной маркировки.
Одно из колес паразитного блока выполнено косозубым, значит, появилась возможность при сборке, передвигая каждый паразитный блок вдоль прямого зацепления одного из его колес, получить одновременный контакт всех пяти косозубых паразитных колес с косозубым колесом ведущего вала. Наличие регулировочных элементов между корпусом и подшипниками позволило жестко зафиксировать подобранное осевое положение паразитного блока.
Кратность чисел зубьев колес паразитного блока обеспечила одинаковое угловое положение этих колес относительно друг друга. Указанные признаки позволяют существенно снизить требования к точности ориентации одного колеса паразитного блока относительно другого и уменьшить трудоемкость изготовления редуктора.
Следует отметить, что известны устройства, например вышеуказанный редуктор Р-26, в котором достигнута полная кратность зубьев в зацеплении [1]. Это вызывает повышенную виброактивность передачи и, как следствие, быстрый выход ее из строя. Поэтому в заявляемом устройстве подбор чисел зубьев переборного и планетарного механизмов был выполнен при строгом соответствии передаточных отношений: iпереб=2iпланет+1.
В переборном механизме: солнечное колесо имеет 55 (пятьдесят пять) зубьев, эпицикл - 115 (сто пятнадцать) зубьев, 5 (пять) паразитных блоков с 17 (семнадцатью) зубьями на одном колесе, на срезанное продолжение которых для образования шлицевого соединения жестко насажено второе колесо с 51 (пятьюдесятью одним) зубом. Следовательно, передаточное отношение переборного механизма:
Из представленного выражения видно: число зубьев солнечного колеса и эпицикла переборного механизма кратно количеству паразитных блоков, а также число зубьев одного колеса паразитного блока кратно числу зубьев второго его колеса.
В планетарном механизме: солнечное колесо имеет 33 (тридцать три) зуба, эпицикл - 87 (восемьдесят семь) зубьев, 6 (шесть) сателлитов с 28 (двадцатью восьмью) зубьями на каждом. Следовательно, передаточное отношение планетарного механизма:
Из представленного выражения видно: сумма чисел зубьев солнечного колеса и эпицикла планетарного механизма кратна количеству сателлитов. Сопоставим передаточные отношения обоих механизмов и получим:
то есть 2iпланет+1=iпереб.
Оптимально найденные соотношения позволили создать конструктивно простой редуктор, удобный при сборке и обеспечивающий при вышеуказанных преимуществах равные встречные обороты соосных валов.
Из вышесказанного следует, что технический результат изобретения достигается новой совокупностью существенных признаков, как вновь введенных, так и известных, следовательно, заявляемое техническое решение соответствует критерию патентоспособности «изобретательский уровень».
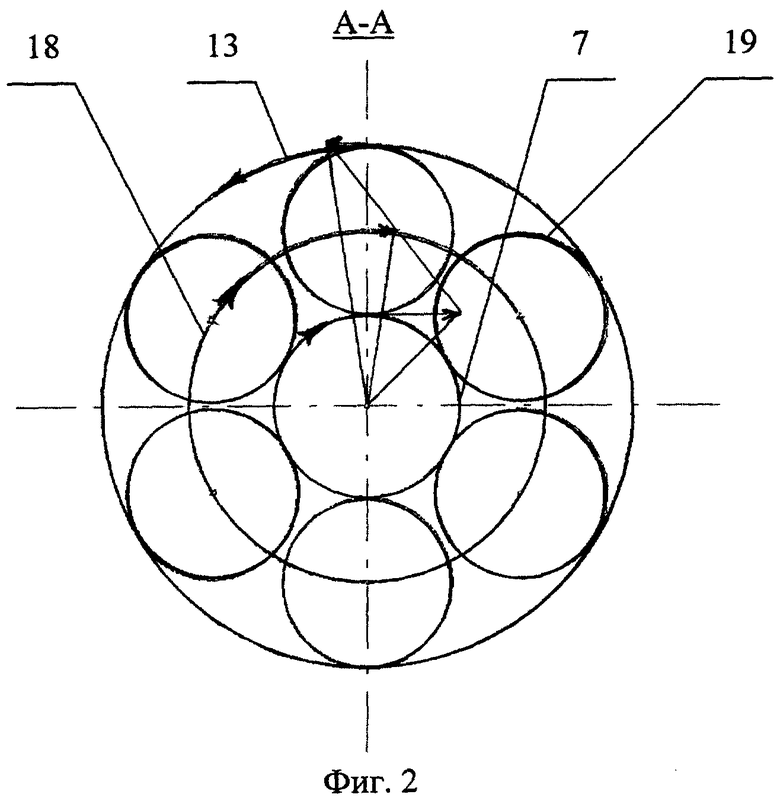
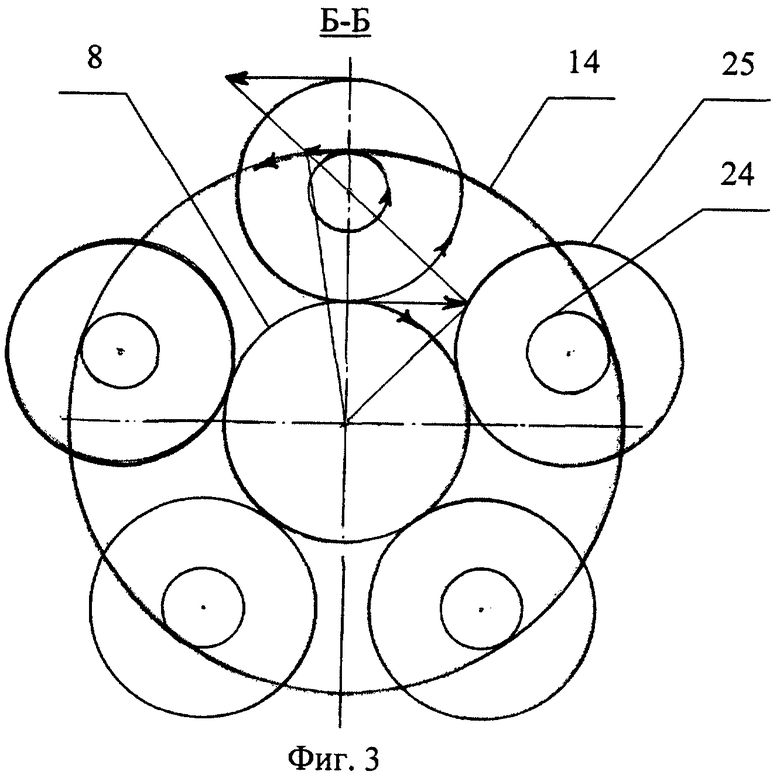
Сущность предложения поясняется чертежами, где на фиг.1 схематично изображен продольный разрез редуктора; на фиг.2 представлен поперечный разрез редуктора А-А с видом на планетарный механизм с планом угловых скоростей вращающихся элементов; на фиг.3 представлен поперечный разрез редуктора Б-Б с видом на переборный механизм с планом угловых скоростей вращающихся элементов.
Следует учесть, что на чертежах для большей ясности представлены только те детали, которые необходимы для понимания существа технического решения, а сопутствующие элементы, хорошо известные специалистам в данной области, на чертежах не представлены.
В приведенном примере конкретного выполнения редуктор представляет собой самостоятельный агрегат, установленный на вертолете для совместной работы с двумя двигателями, и вместе с ними составляет единую силовую установку вертолета.
Редуктор состоит из скрепленных между собой корпусов, внутри которых размещены: основной механизм редуктора, приводы агрегатов и масляная система.
Заявляемое устройство касается только части узлов и систем редуктора, эта часть включает верхний корпус с валами несущих винтов, корпус переборного механизма и сам переборный механизм, планетарный механизм редуктора.
Редуктор вертолета соосной схемы содержит ведущий вал 1, размещенный по продольной оси устройства на подшипниках 2 и 3, установленных соответственно в неподвижном корпусе переборного механизма 4 и крышке 5, стянутых между собой призонными болтами 6.
На ведущем валу 1 закреплены два цилиндрических солнечных колеса 7 и 8. Верхнее солнечное колесо 7 выполнено как прямозубое колесо внешнего зацепления с 33-мя прямыми корригированными зубьями. Нижнее солнечное колесо 8 выполнено как косозубое колесо внешнего зацепления с 55-ю косыми корригированными зубьями.
К корпусу переборного механизма 4 прикреплен верхний корпус 9, в котором на подшипниках 10 и 11 установлен наружный ведомый вал 12. На наружном ведомом валу 12 закреплены два эпицикла 13 и 14. Верхний эпицикл 13 выполнен как прямозубое колесо внутреннего зацепления с 87-ю прямыми корригированными зубьями. Нижний эпицикл 14 выполнен как прямозубое колесо внутреннего зацепления с 115-ю прямыми корригированными зубьями.
Внутри наружного ведомого вала 12 на подшипниках 15 и 16 установлен внутренний ведомый вал 17. К внутреннему ведомому валу 17 жестко закреплено водило 18, в котором на равных расстояниях по окружности расположены шесть сателлитов 19, а именно прямозубые шестерни внешнего зацепления с 28-ю прямыми корригированными зубьями. Сателлиты 19 установлены с опорой на водило 18 через подшипники 20. Каждый сателлит 19 находится в зацеплении с солнечным колесом 7 и эпициклом 13, образуя планетарный механизм.
В корпусе переборного механизма 4 и крышке 5 выполнены пять равноудаленных гнезд, в которых установлены роликовые подшипники 21 и шариковые радиально-упорные подшипники 22, являющиеся опорами паразитного блока 23. Паразитный блок 23 включает прямозубое колесо 24 внешнего зацепления с 17-ю прямыми корригированными зубьями, срезанными по высоте для образования 17-и наружных шлиц. На продолжение этих зубьев с натягом насажено косозубое колесо 25 внешнего зацепления с 51-м косым наружным зубом и 17-ю внутренними шлицами, одинаковым для всех пяти паразитных блоков угловым расположением наружных зубьев и внутренних шлиц. Каждое колесо 24 сцеплено с эпициклом 14, а каждое колесо 25 находится в зацеплении с солнечным колесом 8, образуя, таким образом, переборный механизм.
Под торцами шарикового радиально-упорного подшипника 22 расположены элементы 26, например регулировочные кольца, для осевой фиксации паразитного блока.
Внутренняя обойма роликового подшипника 21 выполнена заодно с прямозубым колесом 24 паразитного блока 23 для повышения жесткости блока и снижения виброактивности редуктора.
Устройство работает следующим образом.
Редуктор предназначен для передачи крутящего момента от двигателей к валам несущих винтов и другим узлам потребления на вертолете.
При вращении ведущего вала 1 солнечное колесо 8, сцепленное с пятью шестернями 25 приводит во вращение колеса 24, эпицикл 14 и соединенный с ним наружный ведомый вал 12, который получает вращение с пониженными оборотами и в направлении, обратном вращению ведущего вала 1 с передаточным отношением:

Одновременно при вращении ведущего вала 1 солнечное колесо 7 приводит во вращение сателлиты 19, которые, обкатываясь по вращающемуся эпициклу 13 и совершая, таким образом, планетарное движение, сообщают водилу 18 и соединенному с ним внутреннему ведомому валу 17 вращение в сторону ведущего вала 1 с пониженными оборотами.
При этом внутреннее передаточное отношение планетарного ряда составляет:

а передаточное отношение к внутреннему ведомому валу 17 составляет:
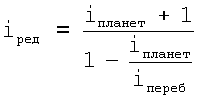
или
Таким образом, редуктор суммирует мощность обоих двигателей и передает ее на валы несущих винтов в соответствии с заданным режимом работы двигателей и обеспечивает привод вертолетных агрегатов.
Устройство было разработано и изготовлено на заводе имени В.Я.Климова и успешно использовано на предприятии заказчика.
Из вышесказанного следует, что изготовление данного устройства промышленным способом не вызывает затруднений, предполагает использование освоенных материалов и стандартного оборудования, что свидетельствует о соответствии заявляемого технического решения критерию патентоспособности «промышленная применимость».
Источники информации
1. Механические передачи вертолетов. / Под редакцией В.Н.Кестельмана. М.: Машиностроение, 1983, с.104, рис.3.34, 3.35.
2. Патент RU №2059535, B64C 27/00, 1996.
3. Механические передачи вертолетов. / Под редакцией В.Н.Кестельмана. М.: Машиностроение, 1983, с.106-109, рис.3.39, 3.40.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕДУКТОР ВОЗДУШНОГО ВИНТА ДЛЯ ТУРБОВИНТОВОГО АВИАЦИОННОГО ДВИГАТЕЛЯ | 2004 |
|
RU2272195C1 |
| ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2023 |
|
RU2813377C1 |
| Многопоточный двухступенчатый редуктор опорно-трансмиссионного узла ветроэнергетической установки | 1989 |
|
SU1796044A3 |
| Планетарный редуктор | 1978 |
|
SU775475A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| ПРИВОД РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ ТКАЦКОГО СТАНКА | 1990 |
|
RU2009282C1 |
| ШИРОКОДИАПАЗОННАЯ РЕВЕРСИВНАЯ ТРАНСМИССИЯ | 2020 |
|
RU2729847C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРИВОДА КОЛЕС ИЛИ МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520224C1 |
| ПЛАНЕТАРНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕДУКТОР | 2013 |
|
RU2528236C1 |
| Планетарный редуктор | 1981 |
|
SU983350A1 |
Изобретение относится к машиностроению, в частности к редукторам вертолетов. Редуктор вертолета соосной схемы содержит ведущий вал, два коаксиально расположенных ведомых вала, внутренний и наружный, кинематически связанные между собой переборный и планетарный механизмы, каждый их которых включает солнечное колесо на ведущем валу и эпицикл на наружном ведомом валу. Переборный механизм содержит паразитные блоки, установленные в неподвижном корпусе. Планетарный механизм имеет сателлиты, помещенные в водило, жестко закрепленное на внутреннем ведомом валу, причем количество сателлитов больше на единицу количества паразитных блоков, число зубьев солнечного колеса и эпицикла переборного механизма кратно количеству паразитных блоков, сумма чисел зубьев этих же элементов в планетарном механизме кратна количеству сателлитов. Техническим результатом заявленного изобретения является создание редуктора, простого по конструкции и удобного при сборке, обеспечивающего при этом равные встречные обороты соосных валов. 5 з.п. ф-лы, 3 ил.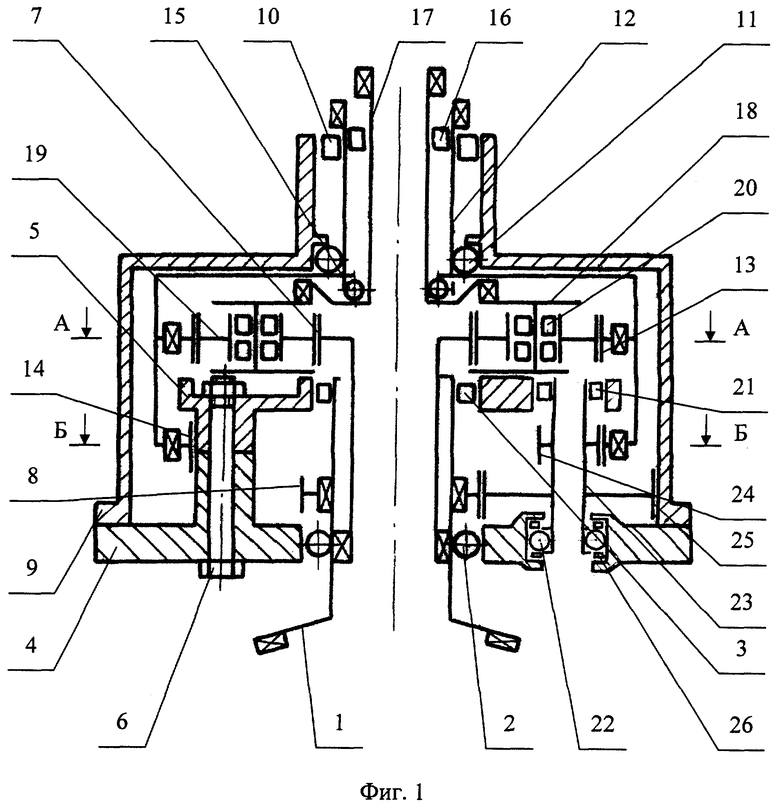
iпереб=2iпланет+1,
где iпереб - передаточное отношение переборного механизма;
iпланет - передаточное отношение планетарного механизма.
| КЕСТЕЛЬМАН В.Н | |||
| МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ ВЕРТОЛЕТОВ | |||
| - М., 1983, с.103-106, 113-115 | |||
| RU 2059535 C1, 10.05.1996 | |||
| RU 2073147 C1, 10.02.1997 | |||
| US 5421656 А, 06.06.1995. |

