Изобретение относится к области регулируемых гидромашин, а именно к аксиально-поршневым машинам с переменным рабочим объемом.
Известна аксиально-поршневая машина (патент DE №10119236, F 04 B 1/30), выбранная за прототип, с наклонным блоком, вращающимся вокруг оси центральной цапфы. В наклонный блок входят поршни, шарнирно опирающиеся на фланец вала, который установлен в корпусе на подшипниках. С противоположной стороны подшипников наклонный блок опирается на распределитель с каналами подвода и отвода жидкости к цилиндрам. Распределитель поворачивается по поверхности вращения корпуса механизма регулирования посредством пальца, кинематически связывающего распределитель и поршень управления, размещенный в корпусе механизма регулирования. Палец установлен в поршне управления поперечно и связан с одной стороны с распределителем, а с противоположной стороны - с поворотной тягой, связанной с датчиком угла поворота.
Недостатком известной машины являются значительные габаритные размеры; неточность и ненадежность измерения датчика угла поворота вследствие возможных люфтов механизма привода датчика, являющихся следствием, в свою очередь, наличия двойного преобразования движения распределителя машины. Кроме того, датчик угла поворота, расположенный на торце машины, ограничивает возможность размещения каналов подвода и отвода к машине рабочей среды.
Известен насос переменной производительности (патент РФ №2155275), выбранный за прототип, содержащий качающий блок, поршень управления положением качающего блока, расположенный в корпусе цилиндра. При этом насос снабжен датчиком положения поршня, выполненным виде линейного трансформатора, причем в поршне управления выполнена выточка, в которой размещена катушка датчика положения, прикрепленная к крышке корпуса цилиндра, а подвижный сердечник датчика соединен с поршнем.
Недостатком прототипа является значительная величина хода датчика положения поршня, обусловливающая значительные габариты известной машины (т.к. данный датчик занимает значительное место в корпусе машины).
Недостатком является также то обстоятельство, что обмотка датчика находится в рабочей полости под давлением рабочей среды. Вследствие этого давление в рабочей полости снижено относительно рабочего давления. Для компенсации снижения давления в рабочей полости увеличивают диаметр поршня управления, что также обусловливает значительные габариты машины в целом.
Нахождение обмотки датчика под давлением рабочей среды обусловливает повышенные требования к изоляции обмотки и к обустройству выводов обмотки наружу к измерительной технике.
Задача, решаемая изобретением, - снижение габаритов аксиально-поршневой машины и повышение надежности ее работы.
Поставленная задача решается тем, что в аксиально-поршневой машине с преобразователем хода поршня управления, содержащей качающий узел и механизм регулирования с поршнем управления положением качающего узла, согласно изобретению преобразователь хода поршня управления содержит датчик Холла, установленный над поршнем управления; между поршнем управления и корпусом механизма регулирования или иным упором, жестко связанным с корпусом механизма управления, установлены две пружины: первая пружина большей жесткости и вторая пружина меньшей жесткости, установленная между первой пружиной и поршнем управления; преобразователь хода поршня управления содержит также постоянный магнит, связанный с первой пружиной с возможностью обеспечения согласованного перемещения первой пружины и постоянного магнита.
Наличие постоянного магнита в преобразователе хода поршня управления необходимо для того, чтобы датчик Холла реагировал на изменение магнитного поля, создаваемого этим магнитом.
Особенностью датчика Холла является то, что он реагирует на изменение магнитного поля только в ограниченном пространстве вокруг себя. Ход поршня управления несоизмеримо больше по размерам датчика Холла, поэтому датчик Холла будет реагировать на изменение магнитного поля только в пределах части возможного перемещения поршня управления. Для того чтобы измерять и реагировать на весь диапазон хода поршня управления, необходимо полный ход поршня управления преобразовывать в иной изменяющийся параметр, на который будет реагировать датчик Холла. Таким изменяющимся параметром будет являться ход первой пружины, более жесткой по сравнению со второй пружиной.
Постоянный магнит необходимо установить таким образом, чтобы он был связан с первой пружиной меньшей жесткости с возможностью обеспечения согласованного перемещения первой пружины и постоянного магнита. При перемещении первой пружины будет соответственно перемещаться и постоянный магнит. При перемещении постоянного магнита будет происходить изменение магнитного поля, создаваемое этим магнитом, вокруг датчика Холла.
При изменении хода поршня управления происходит изменение состояния пружин (они или сжимаются, или разжимаются в зависимости от направления хода поршня). При этом, поскольку первая пружина имеет большую жесткость по сравнению со второй пружиной, при изменении хода поршня большему ходу второй пружины будет соответствовать меньший ход (соответственно ее жесткости) первой пружины. Таким образом, определенному ходу поршня управления будет соответствовать определенный ход второй пружины и соответствующий ход первой пружины, меньший по сравнению с ходом второй пружины.
Таким образом осуществляется преобразование хода поршня управления в ход первой пружины. Жесткость первой пружины выбирается таким образом, чтобы ее ход соответствовал чувствительности датчика Холла, который имеет возможность реагировать на изменение магнитного поля вокруг себя только в небольшом пространстве.
Изменение хода первой пружины вызывает изменение магнитного поля вокруг датчика Холла, который реагирует на это изменение, преобразуя величину данного изменения магнитного поля в электрический сигнал на своем выходе. Определенному положению первой пружины (а соответственно, положению поршня управления) будет соответствовать вполне определенный сигнал на выходе датчика Холла.
Датчик Холла устанавливается в корпусе механизма управления, и имеется возможность размещения датчика Холла в герметичном корпусе. Поэтому исключается негативное воздействие рабочей среды на параметры датчика Холла, т.е. на качество и надежность измерения.
Возможность размещения датчика Холла в герметичном корпусе позволяет в полость над поршнем подавать рабочую среду под рабочим давлением. Наличие в полости над поршнем рабочего давления позволяет минимизировать габариты поршня управления. Размещение постоянного магнита и обеих пружин в полости, находящейся под рабочим давлением, никаким образом не влияет на надежность их работы, т.к. это не токоведущие элементы.
Датчик Холла имеет небольшие размеры и размещается в корпусе механизма регулирования над поршнем управления. Введение датчика Холла никаким образом не влечет увеличение габаритов машины. Установленные над поршнем управления две пружины - большей и меньшей жесткости также не влекут увеличения габаритных размеров машины, т.к. датчик Холла, пружины и постоянный магнит размещены в имеющемся рабочем пространстве машины.
Преобразователь хода поршня управления, содержащий датчик Холла, две пружины и магнит, прост по конструкции и по изготовлению, не требует специальной оснастки.
Простота конструкции преобразователя хода поршня предопределяет надежность его работы, точность измерений.
Установить постоянный магнит таким образом, чтобы он был связан с первой пружиной с возможностью обеспечения согласованного перемещения первой пружины и постоянного магнита, можно, например, следующим образом. В месте стыка первой и второй пружины разместить несущий элемент (кольцо или пластину), на котором будет установлен постоянный магнит, несущий элемент можно прикрепить также непосредственно к первой пружине.
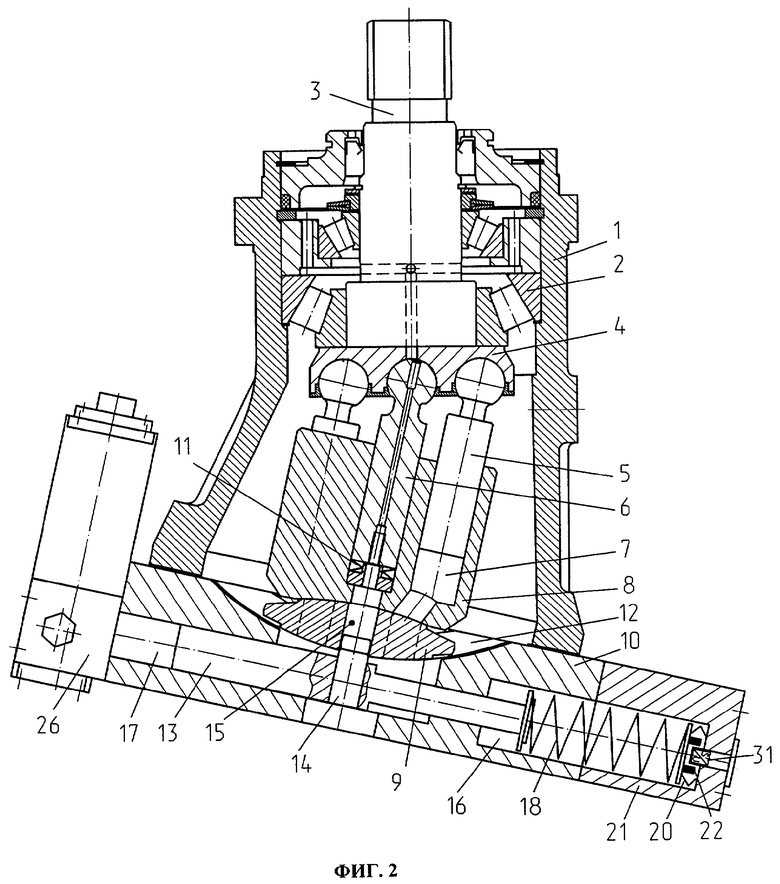
На фиг.1 представлена электрогидрокинематическая схема заявляемой машины.
На фиг.2 представлена заявляемая аксиально-поршневая машина
Аксиально-поршневя машина с преобразователем хода поршня управления содержит корпус 1, в котором на подшипниках 2 установлен вал 3 с фланцем 4. Фланец 4 шарнирно соединен с поршнями 5 и центральной цапфой 6, поршни 5 расположены в цилиндрах 7 вращающегося вокруг оси центральной цапфы 6 блока 8, который приводится во вращение фланцем 4 вала 3 и поршнями 5. Ход поршней 5 определяется углом поворота, образованным осью вращения блока 8 и осью вращения вала 3. Блок 8 опирается на распределитель 9, прилегающий по поверхности вращения к корпусу 10 механизма регулирования. Распределитель 9 прижимается к корпусу 10 под действием усилия пружины 11 и гидравлического давления в цилиндрах 7 блока 8.
Регулирование рабочего объема машины обеспечивается скольжением распределителя 9 по опорной поверхности вращения корпуса 10 вдоль направляющих 12. Перемещение распределителя 9 по опорной поверхности корпуса 10 осуществляется дифференциальным (ступенчатым) поршнем 13 посредством пальца 14, входящего в отверстие 15 распределителя 9. Поршень 13 размещен в цилиндрических полостях 16 и 17 (цилиндры 16 и 17). Цилиндры 16 и 17 расположены в противоположных сторонах по отношению к пальцу 14, при этом в цилиндре 16 размещена часть поршня, имеющая меньший диаметр, а в цилиндре 17 размещена часть поршня 13, имеющая больший диаметр. В цилиндре 16 установлена пружина 18, упирающаяся в поршень 13, последовательно опирающаяся через шайбу 19 на пружину 20, опирающуюся, в свою очередь, в крышку 21 корпуса 10, закрывающую цилиндр 16. Пружина 18 имеет жесткость, меньшую по сравнению с жесткостью пружины 20. Жесткость пружины 20 выбирается исходя из условия, чтобы на всем ходу поршня 13 пружина 20 меняла свое положение (сжималась или разжималась), при этом оба крайних положения пружины 20 (в максимально сжатом и максимально разжатом положении) должны находиться в пределах зоны реагирования датчика Холла 31.
На шайбе 19 закреплен постоянный магнит 22. Цилиндр 16 каналом 23 соединен с каналом 24 рабочего давления машины, который каналом 25 соединен с гидравлическим распределителем 26, управляемый электромагнитом 27. Гидравлический распределитель 26, соединенный каналом 28 со сливом в бак 29, в зависимости от величины и потенциала управляющей электрической мощности на электромагните 27 регулирует давление в цилиндре 17 большего диаметра поршня 13. Для управления электромагнитом 27 имеется усилитель 30, имеющий схему сравнения электрического потенциала датчика Холла 31, зависимое от положения поршня 13 и задающего электрического устройства 32. При передвижении поршня 13 сжимается пружина 18, сжимая при этом пружину 20, которая сжимается на величину, пропорциональную ходу поршня 13 с коэффициентом преобразования, равным соотношению жесткостей пружин 18 и 20. На эту же величину перемещается постоянный магнит 22, закрепленный на шайбе 19, и соответственно меняется электрический потенциал датчика Холла 31.
Аксиально-поршневая машина по заявленному решению имеет меньшие габаритные размеры. Т.к. на датчик Холла 31 не воздействует рабочая среда и давление, он более надежен в работе, а также отсутствует проблема герметизации контактных элементов электрических соединений. Кроме того, пружины 18 и 20 могут использоваться для выведения качающего узла с нулевого рабочего объема, а также они одновременно выполняют функцию слежения и бесконтактного преобразования хода поршня в электрический сигнал.
Выполнение пружинами 18 и 20 одновременно нескольких функций позволяет упростить конструкцию машины, т.к. не требуется введения в машину дополнительных конструктивных элементов, выполняющих вышеуказанные функции.
Заявляемая машина работает следующим образом.
Машина функционально состоит из двух узлов: качающего узла и механизма регулирования.
Качающий узел состоит из вала 3 с подшипниками 2 и вращающегося на центральной цапфе 6 наклонного блока 8 с поршнями 5, распределителя 9, кинематически связанного с поршнем 13.
Механизм регулирования предназначен для изменения рабочего объема аксиально-поршневой машины за счет изменения угла наклона блока 8 к оси вала 3.
Механизм регулирования включает поршень 13, палец 14, входящий в отверстие 15 распределителя 9 и установленный поперечно в поршне 13. Поршень 13 установлен в цилиндрах 16 и 17 корпуса 10 механизма регулирования. Цилиндры 16 и 17 расположены по разные стороны от пальца 14.
В нейтральном положении гидравлического распределителя 26 обеспечивается равенство сил давления, действующих на поршень 13. В процессе работы изменение положения гидравлического распределителя 26 приводит к изменению давления в цилиндре 17 большего диаметра, меняется соотношение сил на поршень 13, что вызывает перемещение последнего. При перемещении поршня 13, связанного с распределителем 9 пальцем 14, происходит изменение угла наклона блока 8 к оси вала 3 и изменение рабочего объема машины.
В процессе перемещения поршня 13 происходит изменение напряженного состояния пружины 18 и 20. При изменении состояния пружины 20 изменяется магнитное поле около датчика Холла 31, который, реагируя на это изменение магнитного поля, соответственно изменяет свой выходной электрический сигнал.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСИАЛЬНО-ПОРШНЕВАЯ МАШИНА С ДАТЧИКОМ ПОЛОЖЕНИЯ ПОРШНЯ РЕГУЛИРОВАНИЯ | 2005 |
|
RU2293878C1 |
| АКСИАЛЬНО-ПОРШНЕВАЯ МАШИНА С ПРЕОБРАЗОВАТЕЛЕМ ХОДА ПОРШНЯ РЕГУЛЯТОРА | 2005 |
|
RU2338090C2 |
| РЕГУЛИРУЕМАЯ АКСИАЛЬНО-ПОРШНЕВАЯ МАШИНА С ДАТЧИКОМ ПОЛОЖЕНИЯ РАСПРЕДЕЛИТЕЛЯ | 2005 |
|
RU2293879C1 |
| РЕГУЛИРУЕМАЯ АКСИАЛЬНО-ПОРШНЕВАЯ МАШИНА С НАКЛОННОЙ ШАЙБОЙ | 2005 |
|
RU2300016C1 |
| АКСИАЛЬНО-ПОРШНЕВАЯ РЕГУЛИРУЕМАЯ МАШИНА | 2005 |
|
RU2284422C1 |
| АКСИАЛЬНО-ПОРШНЕВАЯ ГИДРОМАШИНА С ДАТЧИКОМ ПОЛОЖЕНИЯ ПОРШНЯ УПРАВЛЕНИЯ | 2005 |
|
RU2286479C1 |
| РЕГУЛИРУЕМАЯ АКСИАЛЬНО-ПОРШНЕВАЯ МАШИНА | 2005 |
|
RU2293877C1 |
| РЕГУЛИРУЕМАЯ АКСИАЛЬНО-ПОРШНЕВАЯ МАШИНА | 2005 |
|
RU2300017C2 |
| АКСИАЛЬНО-ПОРШНЕВОЙ РЕГУЛИРУЕМЫЙ МОТОР | 2005 |
|
RU2293875C2 |
| АКСИАЛЬНО-ПОРШНЕВАЯ ГИДРОМАШИНА С РЕГУЛИРУЕМЫМ РАБОЧИМ ОБЪЕМОМ | 2004 |
|
RU2275531C1 |
Изобретение относится к области регулируемых гидромашин, а именно к аксиально-поршневым машинам с переменным рабочим объемом. Аксиально-поршневая машина с преобразователем хода поршня управления содержит качающий узел и механизм регулирования с поршнем управления положением качающего узла. Преобразователь хода поршня управления содержит датчик Холла, установленный над поршнем управления. Между корпусом механизма регулирования или иным упором, жестко связанным с корпусом механизма управления и поршнем управления, последовательно установлены две пружины: первая пружина большей жесткости и вторая пружина меньшей жесткости, установленная между первой пружиной и поршнем управления. Преобразователь хода поршня управления содержит также постоянный магнит, связанный с первой пружиной с возможностью обеспечения согласованного перемещения первой пружины и постоянного магнита. Снижаются габариты аксиально-поршневой машины и повышается надежность ее работы. 2 ил.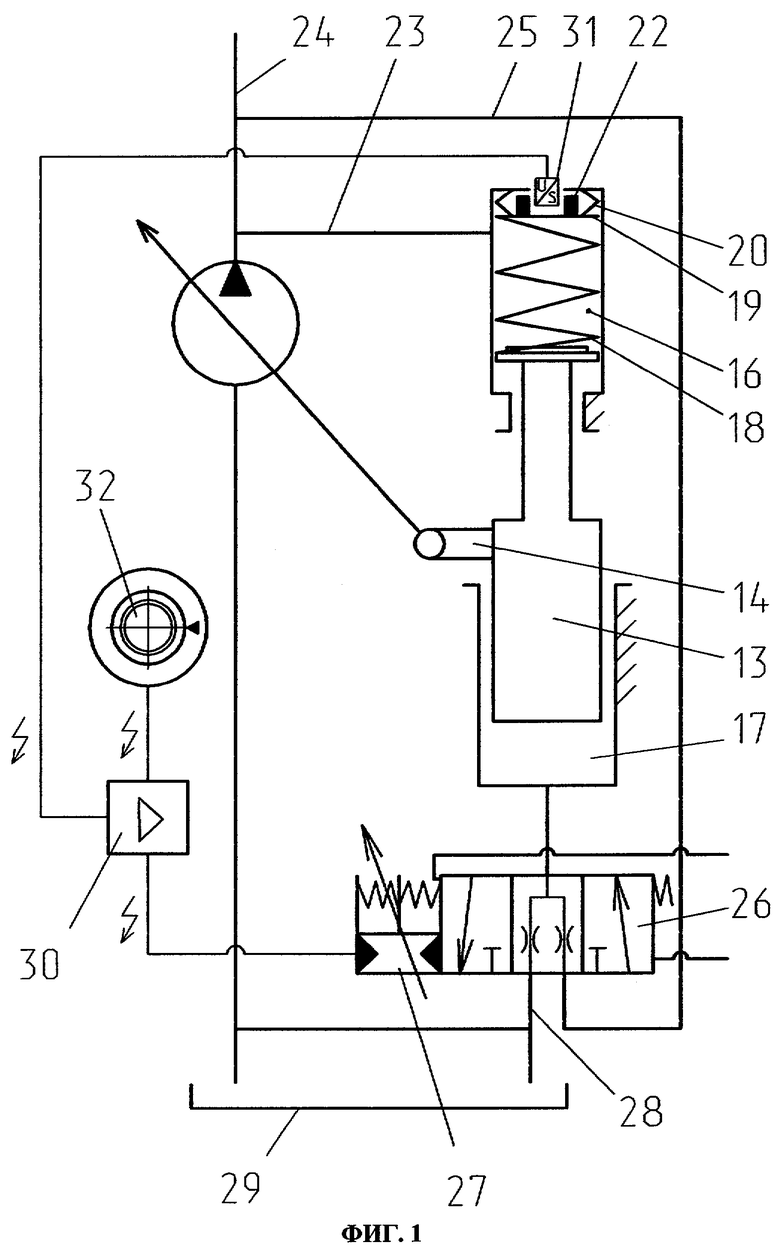
Аксиально-поршневая машина с преобразователем хода поршня управления, содержащая качающий узел и механизм регулирования с поршнем управления положением качающего узла, отличающаяся тем, что преобразователь хода поршня управления содержит датчик Холла, установленный над поршнем управления, между поршнем управления и корпусом механизма регулирования или иным упором, жестко связанным с корпусом механизма управления, последовательно установлены две пружины: первая пружина большей жесткости и вторая пружина меньшей жесткости, установленная между первой пружиной и поршнем управления, преобразователь хода поршня управления содержит также постоянный магнит, связанный с первой пружиной с возможностью обеспечения согласованного перемещения первой пружины и постоянного магнита.
| НАСОС ПЕРЕМЕННОЙ ПРОИЗВОДИТЕЛЬНОСТИ | 1999 |
|
RU2155275C1 |

