Предлагаемое изобретение относится к гидромеханизации, в частности к техническим средствам добычи полезных ископаемых из-под воды.
Известны конструкции земснарядов, включающие плавучий корпус, раму с грунтозаборным устройством, шарнирно установленную в прорези корпуса земснаряда, рамоподъемное устройство, размещенное на корпусе земснаряда (Лобанов В.А. Справочник по технике освоения шельфа. - Л.: Судостроение, 1983, рис.2.41, с.86-87). Недостатком известной конструкции является то, что при увеличении паспортной глубины грунтозабора необходимо изменять длину и массу рамы, рамоподъемное устройство и корпус, т.е. создавать новый типоразмер земснаряда. Это приводит к значительному удорожанию земснаряда. Поэтому такая конструкция является громоздкой и дорогостоящей при создании земснарядов для грунтозабора с больших глубин.
Известна конструкция земснаряда для работы преимущественно на больших глубинах, включающая раму с грунтозаборным устройством и несущую ферму с рамоподъемным механизмом, которая снабжена дополнительной фермой и соединена посредством шарниров с корпусом земснаряда и с поддерживающими поплавками (авторское свидетельство СССР №526694, кл. Е 02 F 3/90, 1973). В данной конструкции в отличие от предыдущей снижается масса корпуса земснаряда, так как рамоподъемное устройство выносится вперед земснаряда за счет специальной фермы, а не за счет удлинения корпуса. Это снижает стоимость глубоководного земснаряда по сравнению с предыдущим случаем. Однако в данной конструкции при увеличении глубины грунтозабора увеличивается длина фермы и расстояние от корпуса земснаряда до поддерживающих поплавков, а также длина рамы. Это снижает надежность работы земснаряда, так как неизбежны перекосы фермы относительно корпуса вследствие зазоров в связывающих их шарнирах, а также перекосы рамы грунтозаборного устройства относительно корпуса, фермы и поплавков. Поэтому при подъеме грунтозаборного устройства рама может быть смещена относительно прорези между поплавками, что исключает возможность подъема и может привести к поломке. С увеличением глубины грунтозабора снижается надежность работы земснаряда, а при боковых течениях или ветре эксплуатация становится невозможной.
Известна также конструкция земснаряда, включающая корпус с шарнирно прикрепленным к нему грунтозаборным устройством, понтоны, размещенные по обе стороны грунтозаборного устройства и связанные между собой порталом, стрелу, связанную с корпусом при помощи шарниров и опирающуюся на понтоны, при этом стрела снабжена упорами, сопрягаемыми с ложементом портала, и дополнительно связана с корпусом оттяжкой регулируемой длины (авторское свидетельство СССР №1342982, кл. Е 02 F 3/88, 1985). Данный земснаряд отличается от предыдущего более простой конструкцией: вместо громоздкой фермы, соединяющей корпус с понтонами, применена стрела с оттяжкой, что снижает стоимость земснаряда. Однако надежность работы земснаряда ниже, чем у предыдущей конструкции, так как связь понтонов со стрелой осуществляется только за счет трения стрелы о ложемент, что неизбежно приведет к отклонению положения грунтозаборного устройства от прорези между понтонами. Поэтому при подъеме грунтозаборное устройство будет смещено относительно прорези между понтонами, что исключает возможность подъема и приведет к поломке. Работа земснаряда при боковых течениях или ветре невозможна.
Известен и принят за прототип земснаряд, включающий корпус, раму с грунтозаборным устройством, одним концом шарнирно соединенную с корпусом, а другим подвешенную на понтонах, соединенных с корпусом связующими элементами, размещенными по обе стороны рамы (Огурцов А.И. Намыв земляных сооружений. - М.: Стройиздат, 1974, рис.II.25, с.65-68). Известный земснаряд отличается от предыдущего более простой конструкцией: понтоны соединены с корпусом не фермой, а плавучими соединительными элементами, выполненными в виде труб. Однако надежность его работы при больших глубинах грунтозабора очень низка из-за отклонения положения рамы грунтозаборного устройства от прорези между понтонами и связующими элементами при папильонировании, а также при течении и ветре.
Решаемая предлагаемым изобретением задача - повышение надежности работы земснаряда.
Технический результат, который может быть получен при использовании заявляемого технического решения - увеличение глубины грунтозабора земснаряда с минимальными материальными затратами.
Для решения поставленной задачи с достижением указанного технического результата в известном земснаряде, включающем корпус, раму с грунтозаборным устройством, одним концом шарнирно соединенную с корпусом, а другим подвешенную на понтонах, соединенных с корпусом связующими элементами, размещенными по обе стороны рамы, согласно предлагаемому изобретению связующие элементы и рама снабжаются направляющими устройствами, установленными по мере подъема рамы с возможностью поочередного вхождения направляющих устройств рамы в направляющие устройства связующих элементов, а в конце подъема рамы с возможностью размещения направляющих устройств рамы в прорези между понтонами для их центрирования относительно рамы.
Возможны дополнительные варианты конструкции земснаряда, в которых целесообразно, чтобы:
- связующие элементы были выполнены в виде соединенных друг с другом поплавков;
- связующие элементы были выполнены в виде ферм, шарнирно соединенных с плавучими элементами, с корпусом и с понтонами, а плавучие элементы имели направляющие для рамы устройства;
- фермы были соединены с плавучими элементами ниже их центров величины;
- плавучие элементы, расположенные по противоположным сторонам рамы, были попарно соединены друг с другом порталами;
- рама была выполнена из последовательно соединенных секций;
- секции были снабжены элементами плавучести и балластировки;
- корпус и понтоны были дополнительно соединены гибкими связями, установленными с возможностью их натяга;
- понтоны были размещены по обе стороны рамы, связаны друг с другом порталом, снабжены направляющими для рамы устройствами, и на портале было размещено рамоподъемное устройство;
- длины секций рамы были кратны длинам поплавков;
- длины секций рамы были кратны суммарной длине отрезка фермы и соединенного с ней плавучего элемента;
- направляющее для рамы устройство в прорези понтонов было выполнено в виде двух рядов роликов противоположного вращения, объединенных в одной кассете, установленной с возможностью поворота вокруг оси, перпендикулярной оси прорези, и продольного вдоль прорези перемещения, при этом ролики служили опорами ветвей каната рамоподъемного устройства;
- направляющие для рамы устройства были выполнены в виде поверхностей клина с углом от 30 до 120°, при этом угол клина устройства рамы не превышал угла клина устройства связующего элемента;
- поверхности направляющих устройств были снабжены роликами;
- поверхности направляющих устройств были выполнены подвижными.
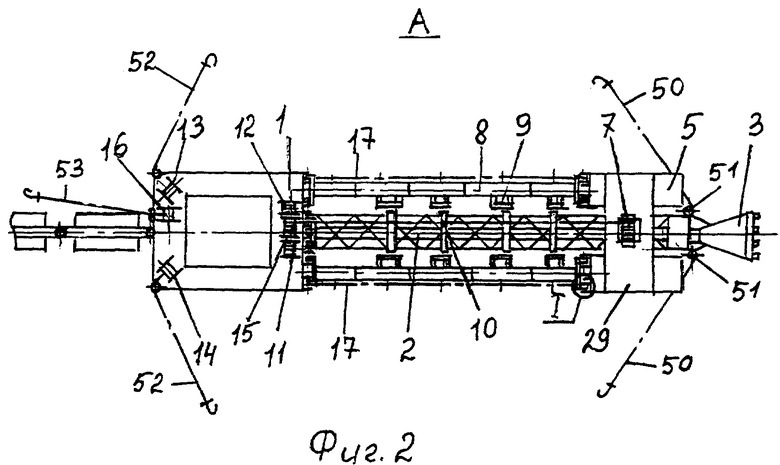
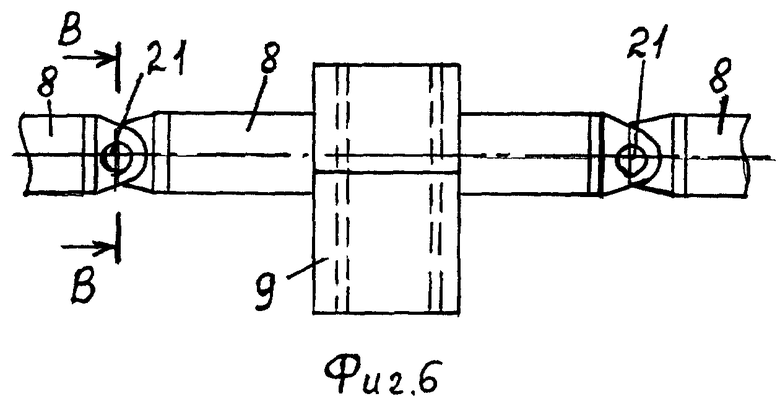
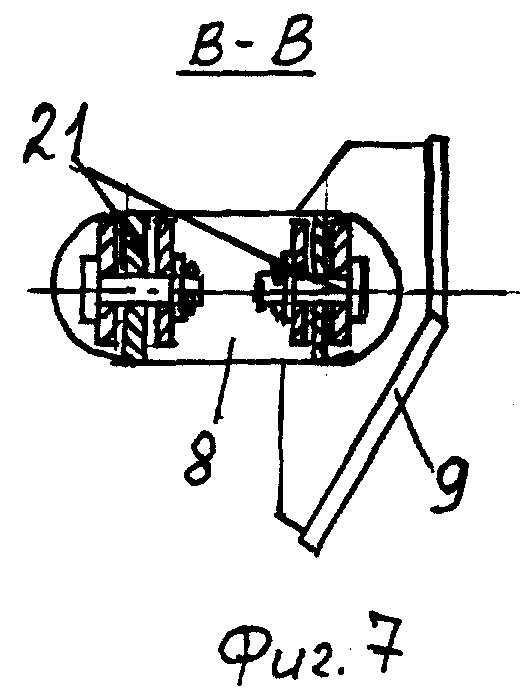
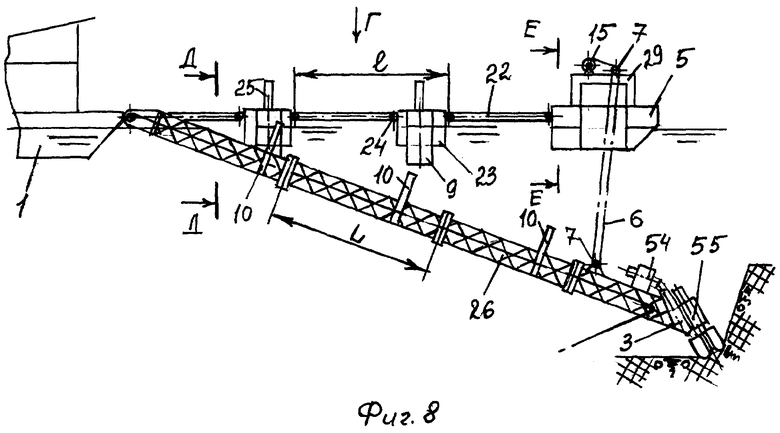
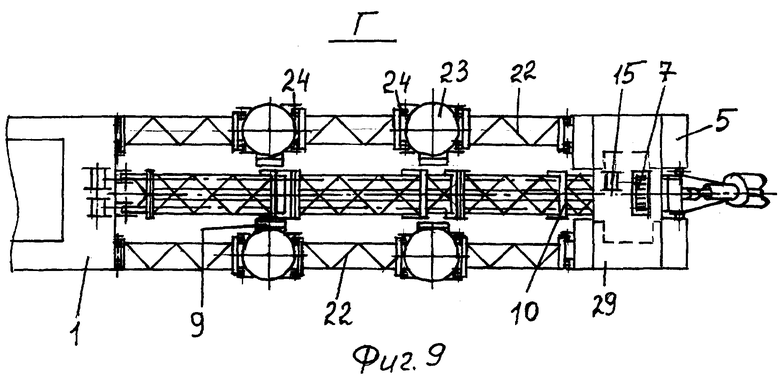
Указанные преимущества, а также особенности предлагаемого изобретения поясняются вариантами его осуществления со ссылками на чертежи: на фиг.1 изображена схема земснаряда в рабочем положении; на фиг.2 - вид А на фиг.1; на фиг.3 - разрез Б-Б на фиг.1; на фиг.4 - вариант устройства натяга гибкой связи; на фиг.5 - вариант фланцевого соединения поплавков; на фиг.6 - вариант шарнирного соединения поплавков; на фиг.7 - разрез В-В на фиг.6; на фиг.8 - вариант схемы земснаряда в рабочем положении; на фиг.9 - вид Г на фиг.8; на фиг.10 - разрез Д-Д на фиг.8; на фиг.11 - вариант соединения ферм с плавучими элементами; на фиг.12 - вариант соединения секций рамы с плавучими и балластирующими элементами; на фиг.13 - разрез Е-Е на фиг.8; на фиг.14 - вариант выполнения направляющего устройства в рабочем положении; на фиг.15 - вариант направляющего устройства в походном положении; на фиг.16 - разрез Ж-Ж на фиг.13; на фиг.17 - разрез И-И на фиг.16; на фиг.18 - вариант выполнения подвески рамы грунтозаборного устройства; на фиг.19 - схема силового взаимодействия рамы и понтонов.
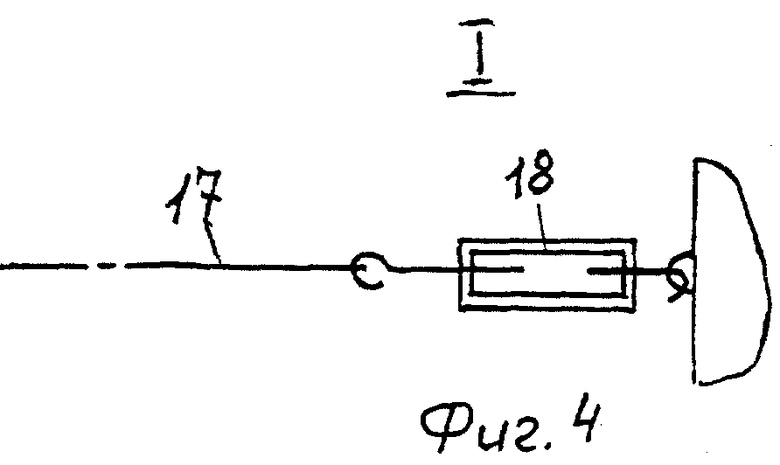
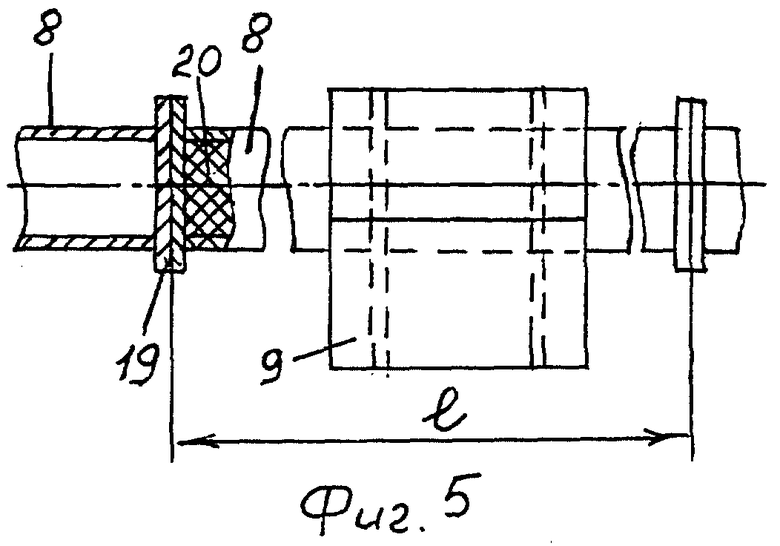
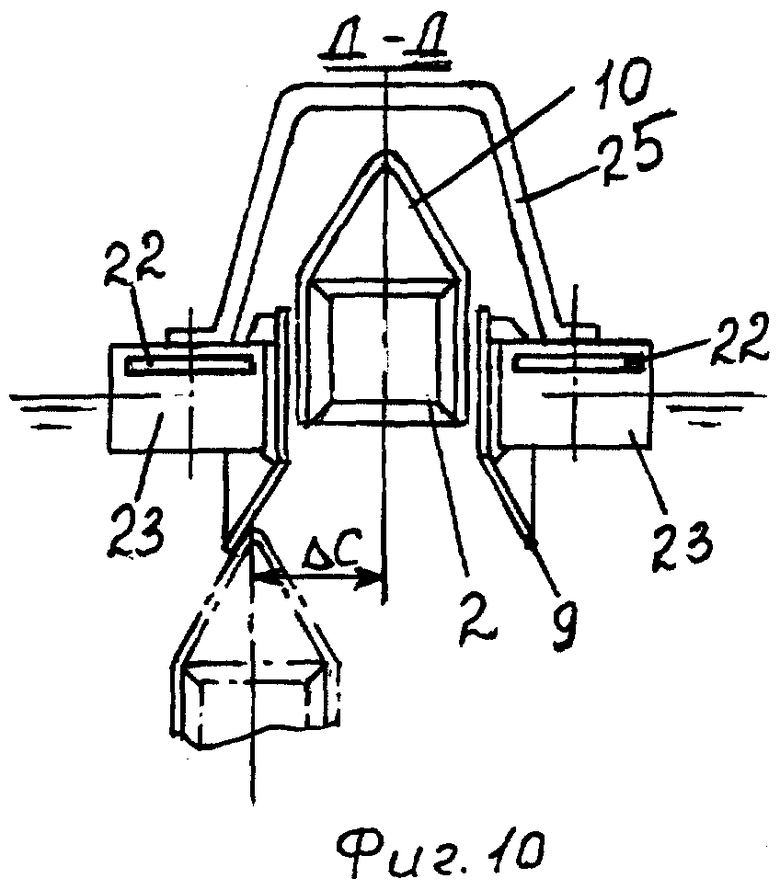
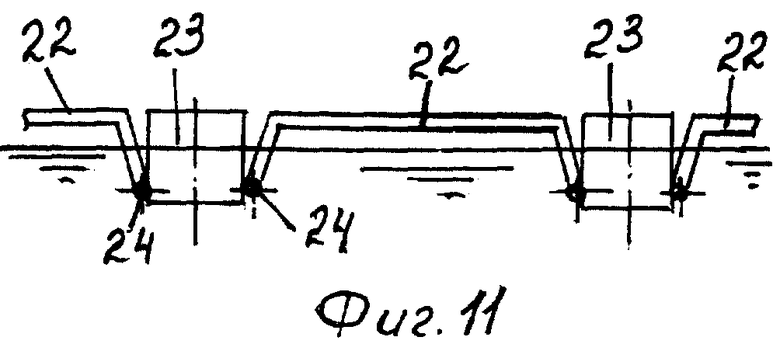
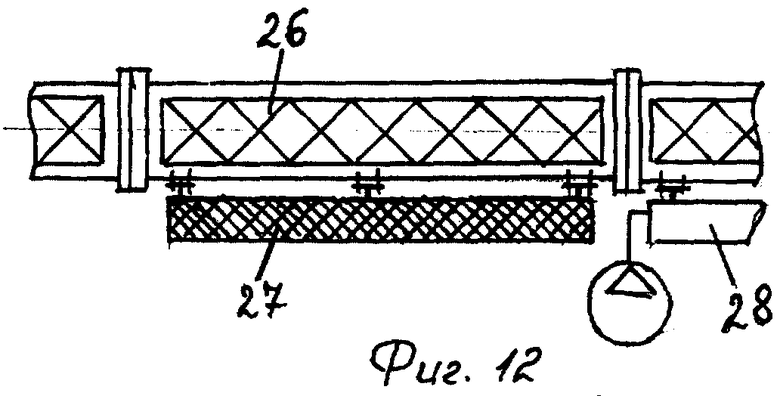
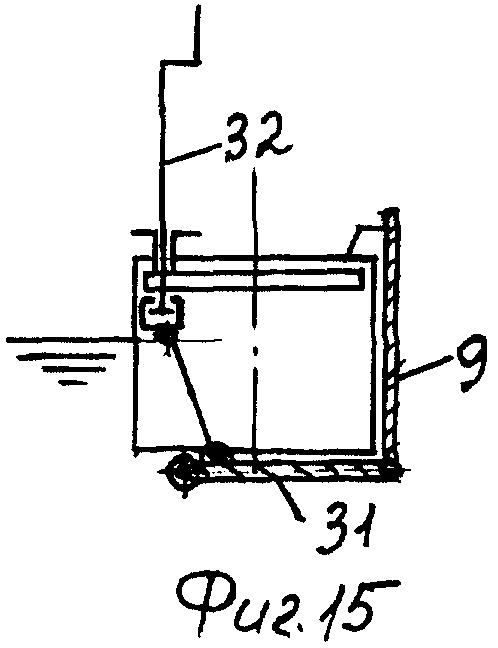
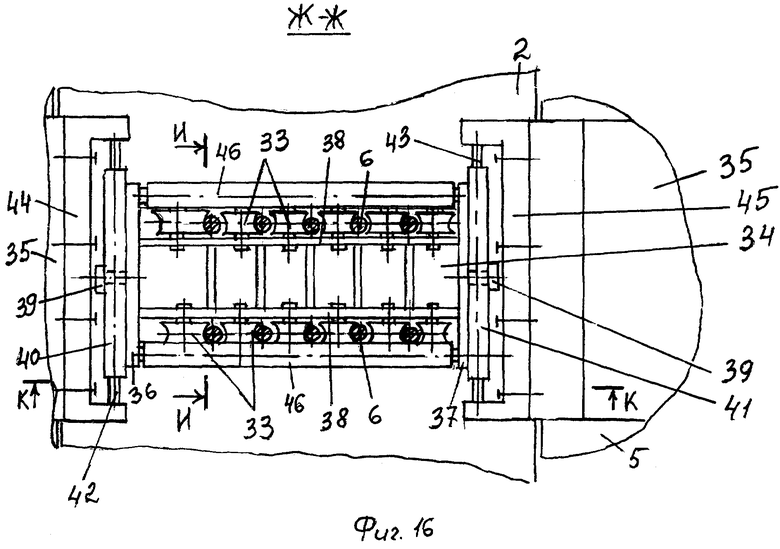
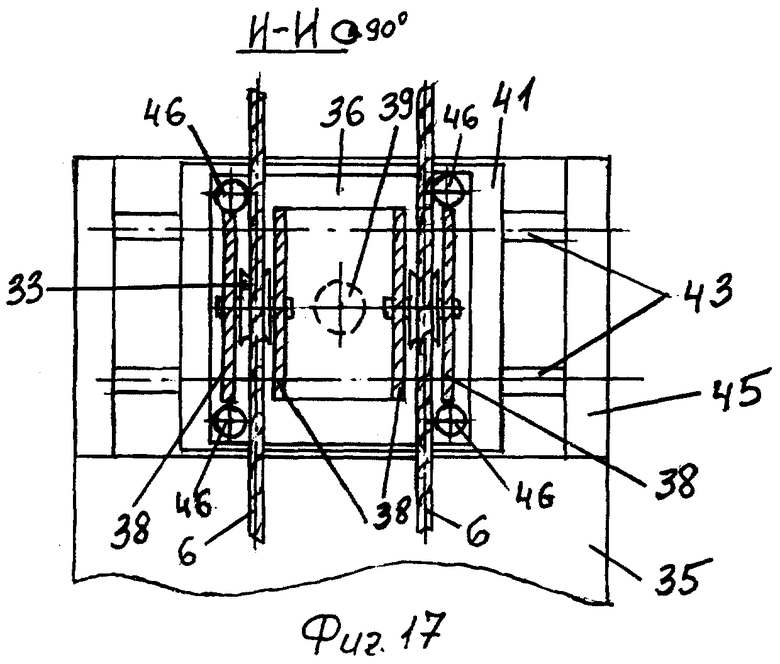
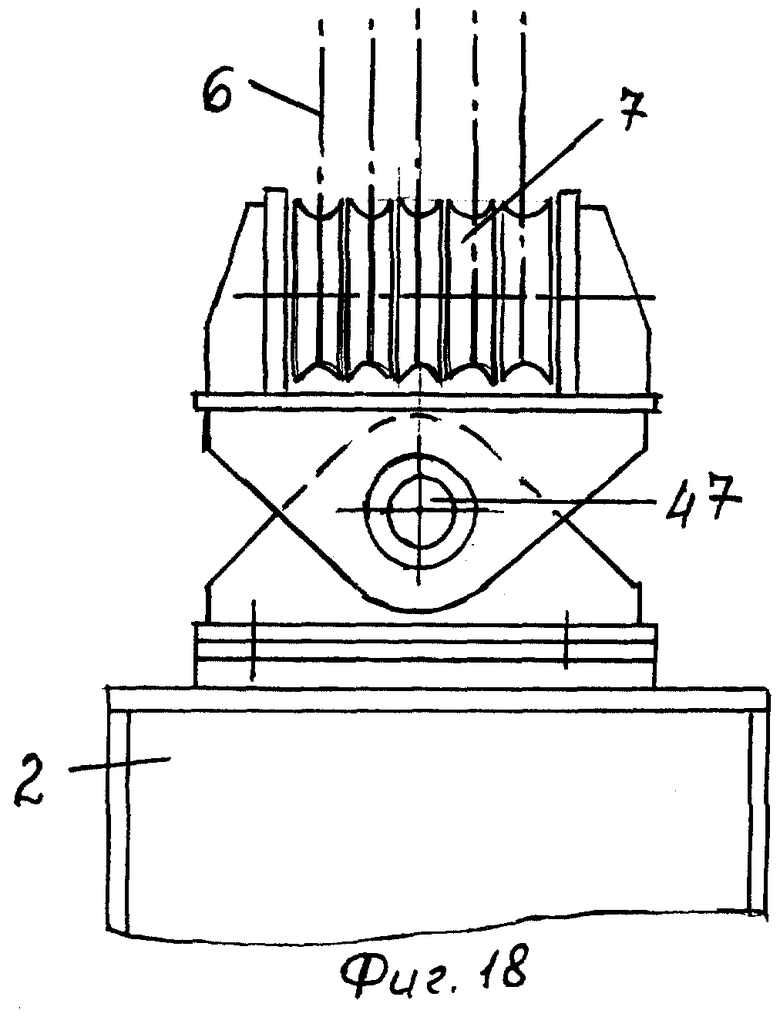
Земснаряд включает корпус 1, раму 2 с грунтозаборным устройством 3. Рама 2 соединена с корпусом 1 шарниром 4, а с понтонами 5 - канатами 6, намотанными на блоки полиспаста 7. Понтоны 5 соединены с корпусом 1 связующими элементами 8. Связующие элементы 8 снабжены направляющими устройствами 9, а рама 2 - 10. На корпусе 1 установлены лебедки: носовые папильонажные 11 и 12, кормовые папильонажные 13 и 14, рамоподъемная 15, кормовая становая 16 (фиг.2). Корпус 1 и понтоны 5 дополнительно соединены гибкими связями, например канатами 17 (фиг.2) с устройством их натяжения, например талрепом 18 (фиг.4). Связующие элементы 8 выполнены в виде поплавков, имеют цилиндрическую форму и между собой сварены (фиг.1) или соединены фланцами 19 (фиг.5); могут быть пустотелыми или заполненными пенопластом 20; имеют овальную форму и соединены шарнирами 21 (фиг.6 и 7). Связующие элементы 8 также могут быть выполнены в виде ферм 22, соединенных с плавучими элементами 23 шарнирами 24 (фиг.8, 9). Плавучие элементы 23, расположенные с противоположных сторон рамы 2, соединены порталами 25 (фиг.10). Шарниры 24 могут находиться ниже центра величины плавучих элементов 23 (фиг.11). Рама 2 выполнена из последовательно соединенных секций 26, соединенных, например, фланцами (фиг.8, 9). Секции 26 снабжены элементами плавучести 27, которые могут быть заполнены пенопластом, и элементами балластировки 28 (фиг.12). Понтоны 5 соединены друг с другом порталом 29 и снабжены направляющим для рамы устройством 30, выполненным в виде клинового выреза в понтонах (фиг.13). Направляющие для рамы устройства 9 могут быть выполнены с подвижной частью 31, которая устанавливается в рабочее (фиг.14) или в походное (фиг.15) положения, например винтовым механизмом 32. Направляющее для рамы устройство в понтонах 5 может быть выполнено также с применением канатонаправляющих роликов 33, установленных в кассете 34 на упорах 35 (фиг.13, 16, 17). Кассета 34 состоит из двух торцевых стенок 36 и 37, жестко соединенных друг с другом четырьмя ребрами 38, между которыми установлены ролики 33. Стенки 36 и 37 установлены с возможностью вращения относительно осей 39 в плитах 40 и 41. Плиты 40 и 41 установлены с возможностью перемещения вдоль попарно расположенных цилиндрических направляющих 42 и 43, жестко смонтированных в корпусах 44 и 45, которые крепятся к упорам 35. Кассета 34 снабжена цилиндрическими роликами 46, установленными в местах входа каната 6 в кассету. Нижние блоки полиспаста 7 закреплены на раме 2 с помощью шарнира 47 (фиг.18, 19). Направляющие для рамы устройства снабжены роликами 48 и 49 (фиг.14). Для позиционирования земснаряда на месте грунтозабора служат носовые папильонажные канаты 50 с якорями, которые проходят по раме и сходят с нее через ролики 51, а также кормовые папильонажные 52 и становой 53 канаты с якорями (фиг.1, 2). Грунтозаборное устройство 3 включает в себя насос 54 с приводом (фиг.1), а также механический рыхлитель 55 с приводом (фиг.8).
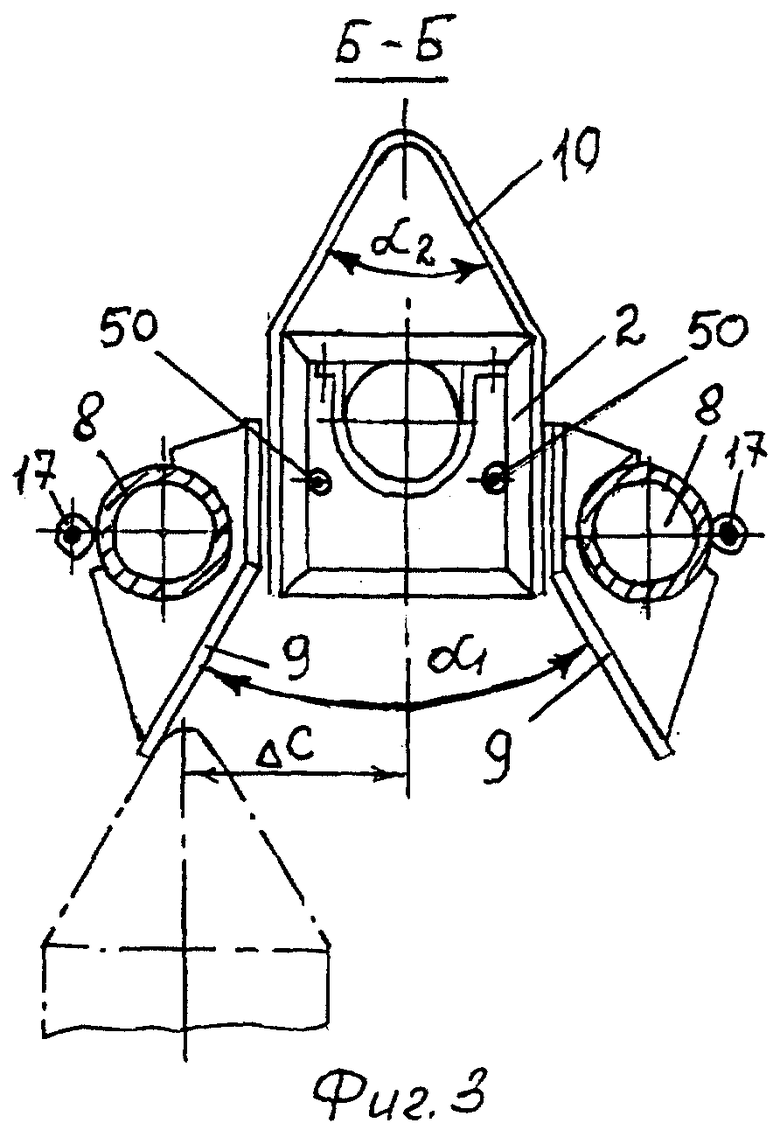
Земснаряд работает следующим образом. При выбирании лебедкой 15 каната 6 осуществляется подъем рамы 2 с грунтозаборным устройством 3. При этом первое от корпуса 1 устройство рамы 10 входит в прорезь первого от корпуса 1 направляющего устройства 9 (см. фиг.3). Устройство 10 оказывает силовое воздействие на одну из стенок устройства 9 и перемещает его вместе со связующим элементом 8 в положение, когда рама 2 находится между ними. По мере подъема рамы 2 следующие от корпуса 1 устройства рамы 10 входят в направляющие устройства 9 и обеспечивают положение связующих элементов 8 по обе стороны рамы. В конце подъема рамы 2 устройства рамы 10 входят в прорезь между понтонами 5 и центрируют их относительно рамы (см. фиг.13).
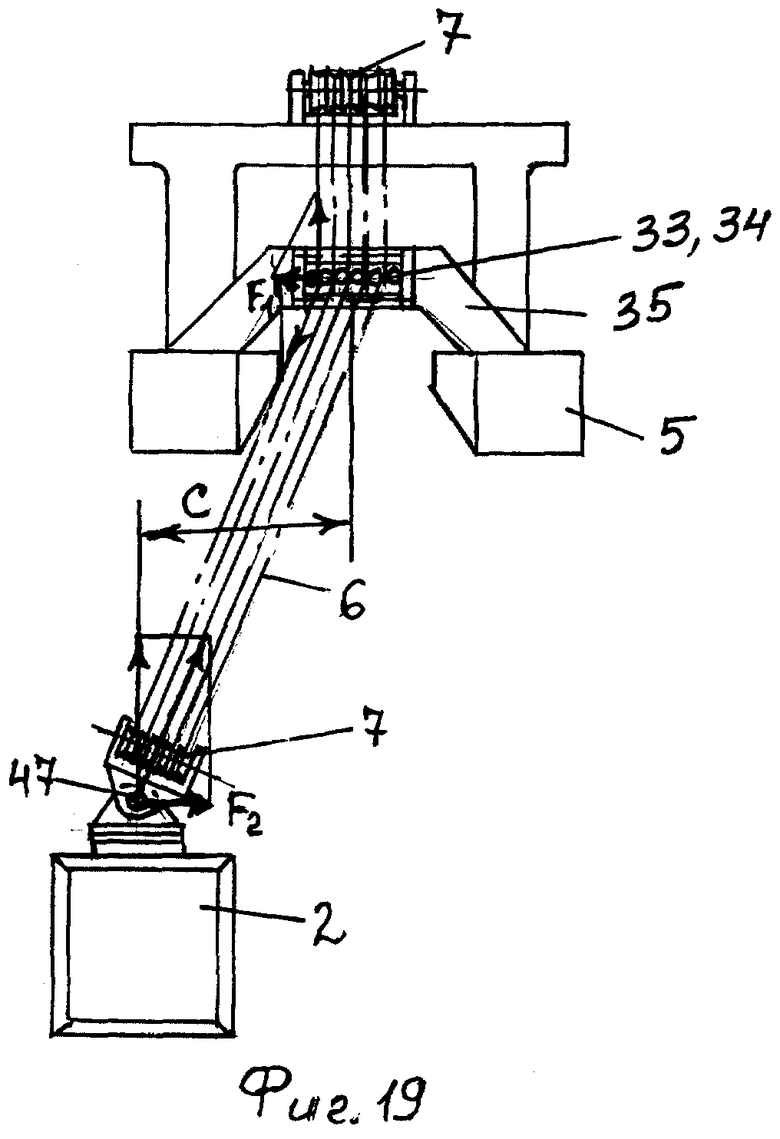
Причины смещения рамы 2 относительно понтонов 5 и связующих элементов 8 заключаются в следующем. После опускания на дно водоема рама 2 оказывается зафиксированной в определенном положении относительно дна, а связующие элементы 8 с понтонами 5 могут быть смещены при наличии боковых течений или ветра от этого положения вследствие гибкости связки 6 между рамой и понтонами. Чем длиннее связка 6 (чем больше глубина грунтозабора), тем больше может быть отклонение «С» рамы 2 от понтонов 5 (см. фиг.19). Рама 2 и понтоны 5 крепятся к корпусу 1 шарнирно. Из-за наличия зазоров в шарнирах также осуществляется смещение рамы 2 от понтонов 5: чем больше длина рамы и дальность отстояния понтонов от корпуса 1, тем на большую величину увеличится отклонение «С». Понтоны 5 соединяются с корпусом 1 связующими элементами 8, которые имеют определенную гибкость, которая позволяет дополнительно отклониться понтонам 5 от рамы 2: чем больше гибкость (чем длиннее связующие элементы 8, а длина их увеличивается с увеличением максимальной паспортной глубины грунтозабора), тем больше увеличение отклонения «С». Если же связующие элементы 8 выполнены из отдельных звеньев 22 и 23, соединенных между собой шарнирами 24, которые имеют зазоры, то отклонение «С» понтонов 5 от рамы 2 увеличивается дополнительно: чем больше звеньев, тем больше зазоров (количество звеньев увеличивается при увеличении максимальной паспортной глубины грунтозабора), тем больше отклонение «С». Таким образом, отклонение «С» понтонов 5 от рамы 2 увеличивается с ростом паспортной глубины грунтозабора, Для земснарядов, забирающих грунт с глубин более 50 м, оно может достигать больших значений. Вместе с понтонами 5 от положения рамы 2 отклоняются также и связующие элементы 8. Чем ближе к корпусу 1, тем меньше это отклонение. Поэтому в предлагаемом техническом решении направляющие устройства 9 устанавливаются по всей длине элементов 8, и смещение первого от корпуса устройства от рамы составит значение ΔС (см. фиг.3). Устройства рамы 10 выравнивают положение рамы и участка связей 8 до корпуса 1 до ΔС=0. Следующее от корпуса 1 устройство 9 будет также смещено от рамы на величину ΔС, и также очередным устройством рамы 10 сводится до значения ΔС=0. По мере подъема рамы 2 происходит последовательное выравнивание ее положения относительно связей 8, благодаря чему в конце подъема отклонение понтонов 5 от рамы 2 также уменьшается до значения ΔС (фиг.13), а затем устройством рамы 10 оно сводится до ΔС=0. Таким образом обеспечивается надежная работоспособность земснаряда при сколь угодно больших глубинах грунтозабора. Это достигается только установкой направляющих для рамы устройств 9 и 10, то есть с минимальными материальными затратами.
Выполнение связующих элементов 8 в виде соединенных друг с другом поплавков также увеличивает надежность работы земснаряда, так как при поломке поплавки могут быть заменены на исправные с минимальными материальными затратами. Установка на каждом поплавке 8 устройства 9 позволит уменьшить значение ΔС и обеспечит взаимозаменяемость поплавков. Также для повышения надежности поплавки 8 могут быть заполнены пенопластом, так как при появлении пробоины они останутся на плаву. Соединение поплавков 8 шарнирами 21 (фиг.6) повышает надежность их работы при волнении.
Выполнение связующих элементов в виде ферм 22, соединенных с плавучими элементами 23 шарнирами 24 (фиг.8 и 9), позволит при сохранении высокой надежности работы снизить материальные затраты на изготовление связующих элементов. Кроме того, такое исполнение обеспечивает надежную работу земснаряда на высокой волне.
Соединение плавучих элементов 23 с фермами 22 шарнирами 24 ниже центра величины плавучих элементов (фиг.11) обеспечит их плавучесть и непотопляемость при сильном волнении, что повышает надежность работы.
Соединение плавучих элементов 23, расположенных на противоположных сторонах рамы 2, порталами 25 (фиг.10) упрощает центровку соединительных элементов относительно рамы при ее подъеме, уменьшает вероятность опрокидывания, что повышает надежность работы.
Выполнение рамы 2 из последовательно соединенных фланцами секций 26 дает возможность изменять длину рамы набором необходимого количества секций: при увеличении глубины грунтозабора длина рамы 2 увеличивается за счет установки дополнительных секций, а также ферм 22 и элементов 23. Следовательно, в начале разработки карьера, когда глубина грунтозабора небольшая, можно работать рамой с минимальной длиной, а по мере углубления длину рамы 2 и соединительных элементов 8 постепенно наращивать, обеспечивая максимальную надежность работы. Необходимо учесть, что рамоподъемная лебедка 15 рассчитана на массу рамы, которая обеспечивает эффективную работу грунтозаборного устройства 3. Чтобы не изменять грузоподъемность лебедки 15, дополнительные секции необходимо снабжать элементами плавучести 27 и балластировки 28. Это обеспечит постоянство габаритов понтонов 5 и надежную работу земснаряда для высокого диапазона изменения глубины грунтозабора. Преобразование земснарядов для различных глубин грунтозабора потребует минимальных материальных затрат.
Для повышения надежности работы земснаряда на течении устанавливаются гибкие связи 17 (фиг.2), при натягивании которых увеличивается жесткость соединения корпуса 1 с понтонами 5, что снижает отклонение положения рамы 2 от понтонов 5. Это увеличивает надежность работы. Кроме того, вводя стягивающие элементы 17, можно устанавливать фермы 22 меньшей прочности, что снизит материальные затраты на изготовление земснаряда.
Объединение понтонов 5 порталом 29 дает возможность выполнить в них направляющее устройство для рамы в виде выреза 30 (фиг.13), так как понтоны становятся цельным плавучим средством, что повышает надежность работы. Размещение на портале рамоподъемной лебедки 15 (фиг.8, 9) исключает усилие каната от лебедки, размещенной на корпусе 1, которое создает опрокидывающий момент на понтоны 5 (фиг.1, 2), что повышает надежность работы.
Выполнение длин секций 26 рамы 2 длиной L=n·l, где l - длина поплавка 8 (фиг.5) или суммарная длина фермы 22 и плавучего элемента 23 (фиг.8); n - 1, 2,... - целое число (т.е. L кратно l), обеспечивает дополнительную установку секций при удлинении рамы (или изъятие секций из рамы 2 при уменьшении ее длины) совместно со связующими элементами 8. Это повышает надежность работы при изменении глубин грунтозабора и снижает материальные затраты на модификацию земснаряда.
Направляющее для рамы 2 устройство в прорези понтонов, выполненное в виде кассеты 34 с роликами 33, обеспечивает ускорение центровки рамы 2 относительно прорези понтонов 5. Через ролики 33 передается усилие F1 от натяжения ветвей каната 6 полиспаста на корпус понтонов 5, а со стороны подвески 47 усилие F2 (фиг.19) действует на раму 2. Усилия F1 и F2 стремятся сцентрировать раму 2 и прорезь понтонов 5, что повышает надежность работы при работе с механическим рыхлителем грунта, когда работа ведется папильонажным способом. Конструкция направляющего устройства включает ролики 46, которые взаимодействуют с канатами 6 при их отклонении от первоначального положения. При изменении глубины грунтозабора (при подъеме или опускании рамы 2) изменяется угол наклона канатов 6 к горизонту, при этом они оказывают силовое воздействие на ролики 46. Ролики 46 поворачивают кассету 34 вокруг осей 39, устанавливая ее вдоль канатов 6, что обеспечивает надежность работы роликов 33 при передаче нагрузки канатов на понтоны 5. При изменении глубины грунтозабора изменяется не только угол наклона канатов 6, но и их положение вдоль прорези между понтонами 5. При этом силовое воздействие канатов 6 на ролики 46 передается через стенки 36, 37 и оси 39 на плиты 40 и 41, которые перемещаются вдоль направляющих 42 и 43 вместе с канатами. Это также повышает надежность работы земснаряда.
Для увеличения значения допустимого отклонения положения рамы 2 от положения связующих элементов 8 (т.е. увеличения допустимого значения ΔС, что повышает надежность работы земснаряда) направляющие для рамы устройства 9 и 10 выполнены в виде поверхностей клина с углами при вершине  и
и  (фиг.3). Для надежной работы должно выполняться соотношение
(фиг.3). Для надежной работы должно выполняться соотношение  . Так как при силовом взаимодействии устройств 9 и 10 имеется трение скольжения их поверхностей, то значение этих углов должно составлять 30-120°. При меньших значениях затрудняется попадание устройства 10 в раствор устройства 9, а при больших значениях - увеличивается сила трения, что также снизит надежность работы.
. Так как при силовом взаимодействии устройств 9 и 10 имеется трение скольжения их поверхностей, то значение этих углов должно составлять 30-120°. При меньших значениях затрудняется попадание устройства 10 в раствор устройства 9, а при больших значениях - увеличивается сила трения, что также снизит надежность работы.
Для уменьшения силы трения при силовом взаимодействии направляющих для рамы устройств 9 и 10 они могут быть снабжены роликами 48 и 49 (фиг.14), что позволит заменить силу трения скольжения на силу трения качения и повысить надежность работы, так как в этом случае углы клина и могут превышать 120°. Это позволит работать с увеличенными значениями допустимого отклонения положения рамы 2 от связующих элементов 8 (с большими значениями ΔС).
Выполнение в направляющих для рамы устройствах 9 подвижной поверхности 31 (фиг.14, 15) обеспечивает возможность регулирования угла клина в зависимости от условий эксплуатации, а также убирать эту поверхность под днище поплавков в походном положении при транспортировании земснаряда по мелководью. Для этой цели устройства 9 могут быть выполнены съемными. Это также увеличивает надежность работы земснаряда при различных условиях эксплуатации и транспортировки.
Предлагаемый земснаряд обеспечивает эффективную надежную разработку карьеров слоями: вначале ведется разработка по толщине первого слоя короткой рамой 2 при соответствующей длине связующих элементов 8. Для разработки последующих слоев рама 2 наращивается за счет установки определенного количества секций 26 рамы, а связующие элементы 8 удлиняют в соответствии с длиной рамы путем установки дополнительных поплавков или ферм с плавучими элементами. Необходимое количество секций 26 рамы определяется толщиной разрабатываемого слоя и углом наклона рамы. Такое наращивание рамы 2 и связующих элементов 8 осуществляется для каждого слоя до полной выработки карьера. Толщины разрабатываемых слоев определяются грунтовыми условиями (угол естественного откоса, степень связанности грунта, условия первоначального заглубления, наличие связных прослоек и др.) и рассчитываются исходя из получения максимальной эффективности разработки.
В качестве грунтовых насосов 54 могут быть применены насосы динамического типа (центробежные, осевые, диагональные), объемного типа (поршневые, плунжерные, винтовые, пластинчатые), эжекторные, эрлифтные, а также их комбинации с применением бустерных насосов. Привод насосов в зависимости от глубины грунтозабора может быть подводного расположения, или надводного с валовой линией.
В качестве рыхлительных устройств 55 могут быть использованы гидравлические рыхлители, механические рыхлители, вибрационные и другие типы.
Для снижения материальных затрат при модификации земснаряда для различных паспортных глубин грунтозабора секцию рамы с насосной установкой и полиспастом рамоподъемного устройства необходимо оставлять при всех вариантах длин рамы, а добавлять секции с элементами плавучести (при удлинении рамы) или изымать их (при уменьшении длины рамы), следует между этой секцией и корпусом земснаряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический земснаряд | 1982 |
|
SU1062353A1 |
| ГРУНТОЗАБОРНОЕ УСТРОЙСТВО ЗЕМЛЕСОСНОГО СНАРЯДА | 2004 |
|
RU2289656C2 |
| Земснаряд | 1973 |
|
SU526694A1 |
| Пневмогидравлический земснаряд | 1980 |
|
SU910945A1 |
| ГРУНТОЗАБОРНОЕ УСТРОЙСТВО ЗЕМЛЕСОСНОГО СНАРЯДА | 2008 |
|
RU2390612C2 |
| РОТОРНО-КОВШОВОЕ ГРУНТОЗАБОРНОЕ УСТРОЙСТВО | 1992 |
|
RU2012732C1 |
| РОТОРНО-КОВШОВОЕ ГРУНТОЗАБОРНОЕ УСТРОЙСТВО | 1992 |
|
RU2012722C1 |
| ЧЕРПАКОВОЕ УСТРОЙСТВО ЗЕМСНАРЯДА | 2007 |
|
RU2434997C2 |
| Землесосный снаряд | 1989 |
|
SU1751270A1 |
| Землесосный снаряд | 1985 |
|
SU1416616A1 |


Предлагаемое изобретение относится к гидромеханизации, в частности к техническим средствам добычи полезных ископаемых из-под воды. Техническая задача - увеличение глубины грунтозабора земснаряда с минимальными материальными затратами. Земснаряд включает корпус, раму с грунтозаборным устройством, одним концом шарнирно соединенную с корпусом, а другим подвешенную на понтонах, соединенных с корпусом связующими элементами, размещенными по обе стороны рамы. Связующие элементы и рама снабжены направляющими устройствами, установленными по мере подъема рамы с возможностью поочередного вхождения направляющих устройств рамы в направляющие устройства связующих элементов, а в конце подъема рамы с возможностью размещения направляющих устройств рамы в прорези между понтонами для их центрирования относительно рамы. 14 з.п. ф-лы, 19 ил.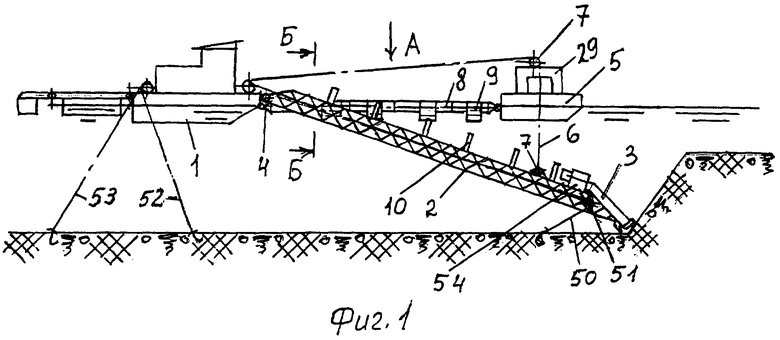
| ОГУРЦОВ А.И | |||
| Намыв земляных сооружений | |||
| - М.: Стройиздат, 3-е изд., 1974, с.65-68, (рис.11.25) | |||
| Земснаряд | 1973 |
|
SU526694A1 |
| Земснаряд | 1980 |
|
SU926171A1 |
| Землесосный снаряд | 1985 |
|
SU1342982A1 |
| GB 1159336 A, 03.04.1967 | |||
| US 3919791 A, 18.11.1975. | |||

