1
Изобретение относится к горно-до- бычным работам, в частности их гидромеханизации, и предназначено для разработки грунтов в подводных забоях.
Известно устройство, включающее корпус, раму грунтозаборного устройстёа и всасывающий пульпопровод с рабочим органом, которые с пЪмощ|ью гидроцилиндров телескопически выдвигаются в сторону . Папильонирование земснаряда осуществляется за счет двух лебедок, установленных в носовой части корпуса Г11.
Однако данное устройство не может обеспечить высокую производительность земснаряда, так как не обеспечивает постоянного и заданного контакта рабочего органа с откосом подводного забоя. Кроме того, управление выдвижением рабочего органа и папильонированием земснаряда усложнено, так как выполняется с помощью гидррцилиндров и двух пап.ияьонажных лебедок.
Известен также земснаряд, включающий плавучий корпус, грунтозаборное устройство и понтоны, расположенные по обе стороны корпуса Г2.
Недостатком этого земснаряда являются его большие габаритные размеры вследствие жестко закрепленных понтонов.
Цель изобретения - повышение производительности земснаряда.
10
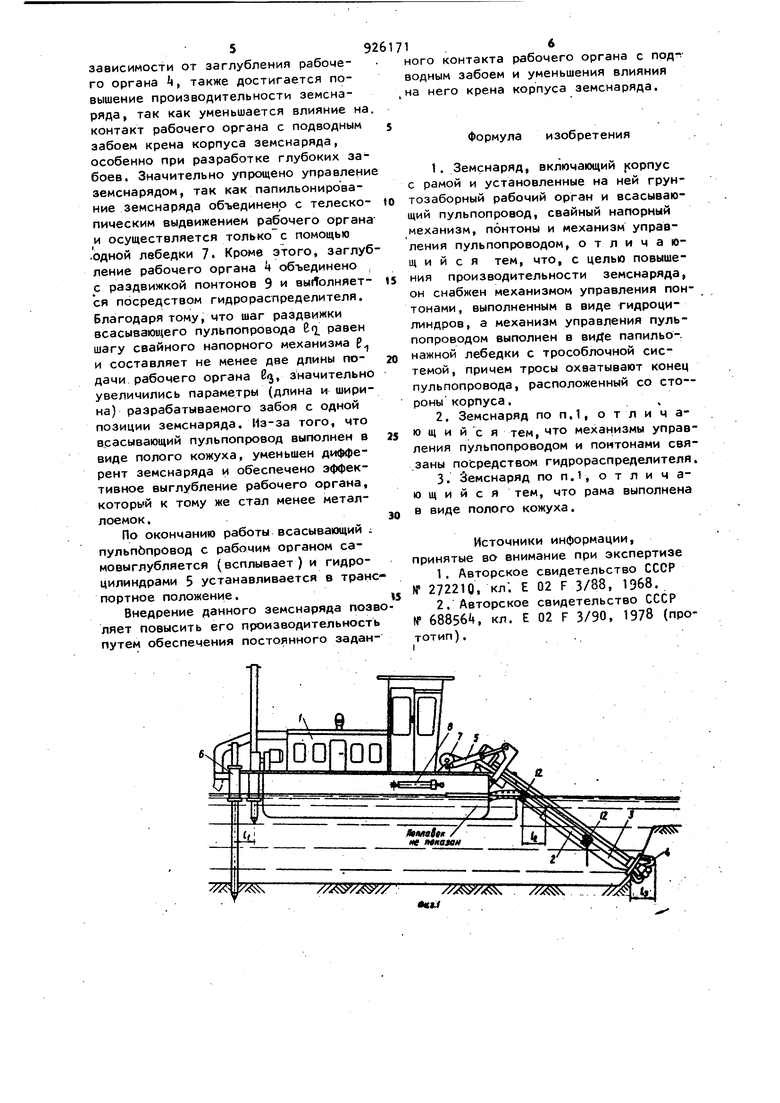
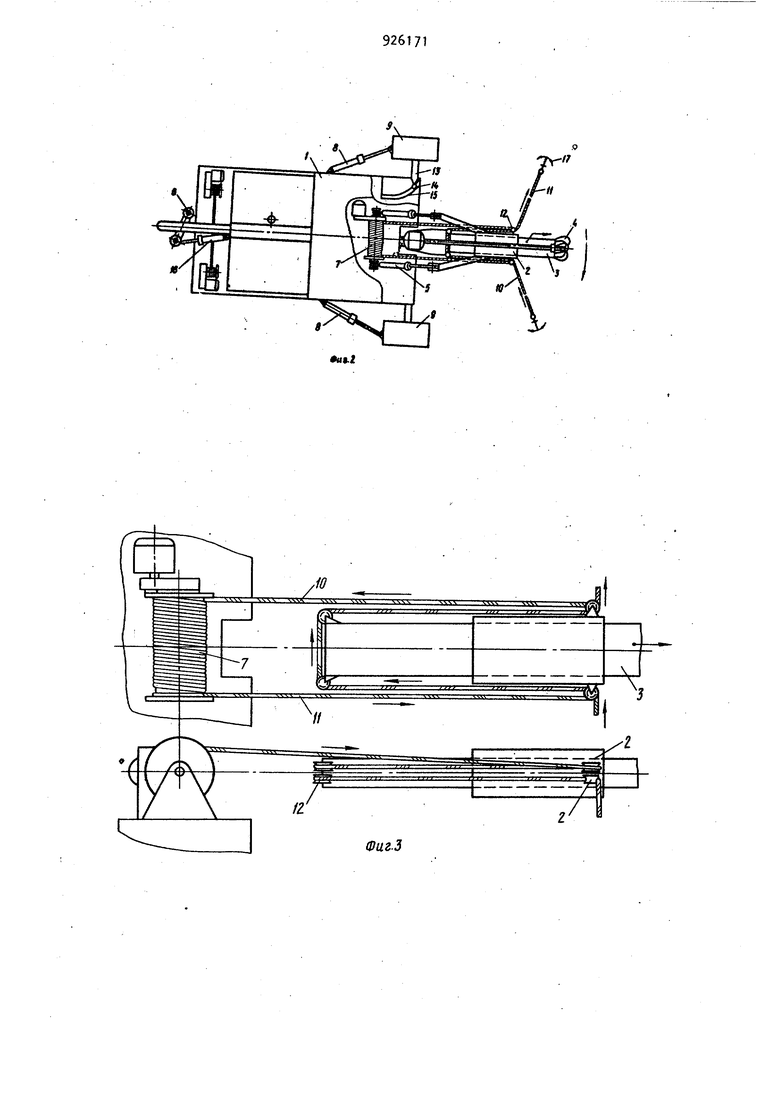
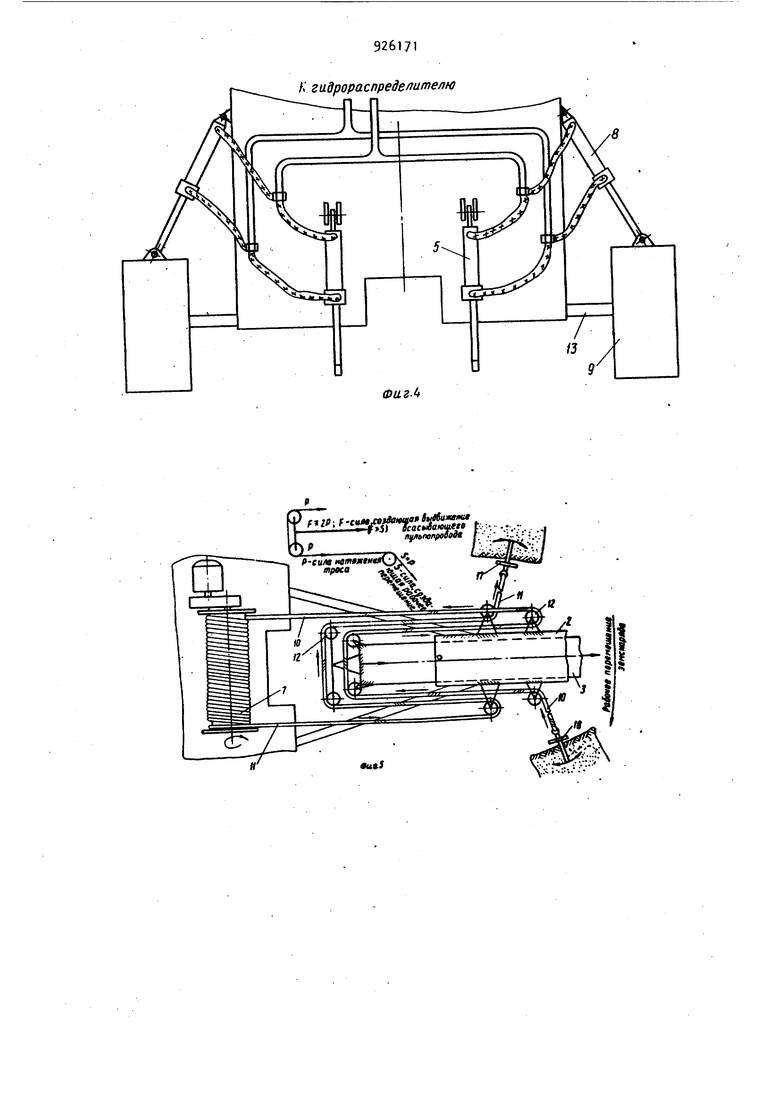
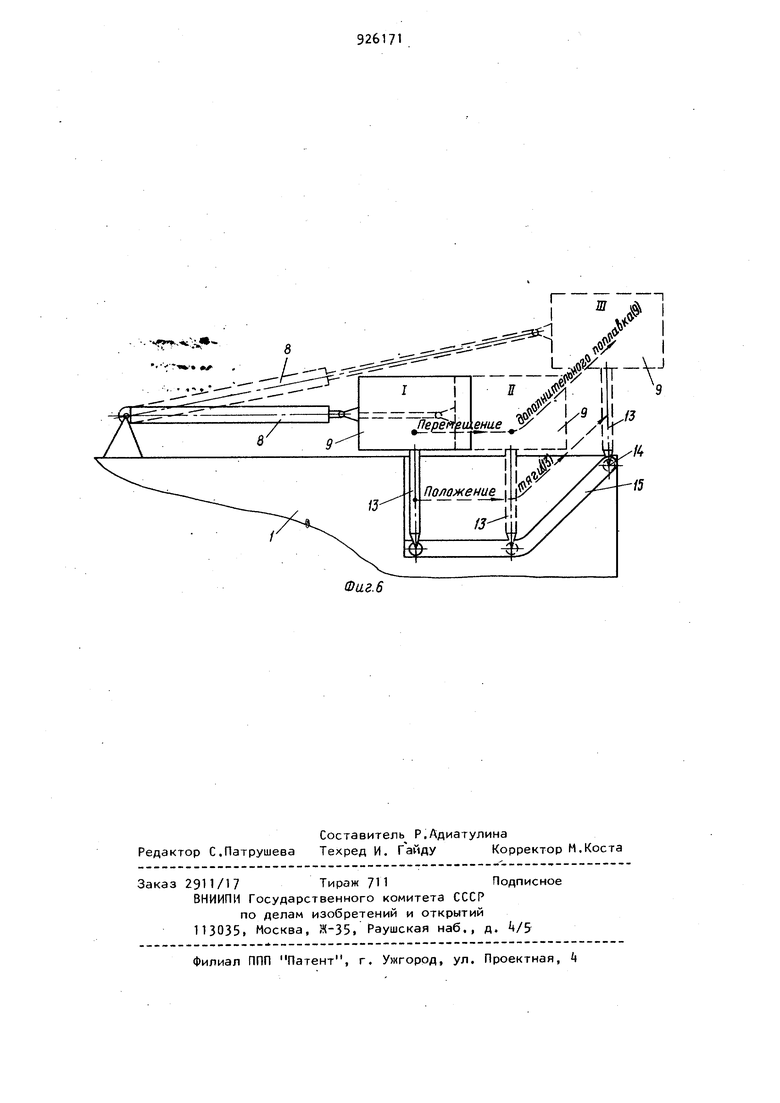
Поставленная цель достигается тем, что земснаряд, включающий корпус с рамой и установленные на ней грунтозаборный орган и всасывающий пульпопровод, свайный напорный меISханизм понтоны и механизм управления пульпопроводом, снабжен механизмом управления понтонами, выполненным в виде гидроцилиндров, а механизм управления пульпопроводом выXполнен в виде папильонажной лебедкис трособлочной системой, причем тросы охватывают конец пульпопровода, расположенный со стороны корпуса. Кроме того, механизмы управления пульпопроводом и понтонами связаны посредством гидрораспределителя. В земснаряде рама выполнена в виде полого кожуха. На фиг. 1 изображен земснаряд,общий вид;на фиг.2 - в плане; на фиг.З - трособлочная система; на фиг. - гидропривод; на фиг.5 схема выдвижения всасывающего пульпопровода и схема усилий в трособлоч ной системе; на фиг.6 - схема управления понтонами. Земснаряд включает корпус 1, раму 2, всасывающий пульпопровод 3i грунтозаборный рабочий орган Л, рамоподъ емные гидроцилиндры 5 свайный напор ный механизм 6, папильонажную лебедк 7, гидроцилиндры 8и понтоны 9. Рама 2 связана с выдвижным всасывающим пульпопроводом 3 общей трособлочной системой так, что конец каждого из тросов 10 и 11 папильонажной лебедки 7 охватывает через блоки 12 всасывающий пульпопровод 3 со стороны хорпу са 1 с возможностью самовыдвижения его в сторону забоя при папильонировании земснаряда. Носовая часть корпуса 1 посредством гидроцилиндров 8 соединена с двумя понтонами поплавками 9, установленными с зможностью раздвижки в диаметральной и мидельшпангоутной плоскости земснар да в зависимости от заглубления рабочего органа f. Понтоны 9 имеют жесткие тяги 13с роликами 1Ц, которые передвигаются по направляющим 15. На корпусе 1 земснаряда перпендикулярно его диаметральной плоскости, смонтирована папильонажная лебед ка 7, а гидропривод рамы 2 и понтонов поплавков 9 объединен на гидрораспределителе. Шаг раздвижки всасывающего пульпопровода ч равен шагу свайного напорного механизма Е-, и составляет не менее две длины подачи рабочего органа Б. Свайный напорный механизм связан с гидроцилиндром 16. Всасывающий пульпопровод 3 выполнен в виде полого кожуха, заполненного воздухом. Земснаряд работает следующим обра зом . Устанавливают земснаряд в Забой, опускают сваю напорного механизма 6. Затем концы тросов 10 и 11 папильонажной лебедки 7 жестко закрепляются по обе стороны забоя к якорям 17. После этого с помощью гидроцилиндров 5 заглубляют грунтозаборный рабочий орган k. Так как гидропривод рабочего органа k и понтонов 9 связан посредством гидрораспределителя, то одновременно гидроцилиндры 8 раздвигают понтоны 9 причем сначала в диаметральной плоскости до полного погружения в воду рабочего органа, затем в мидельшпангоутной плоскости в зависимости от заглубления рабочего органа. Включают земснаряд в работу и одновременно папильонажную лебедку 7, один конец троса 11 которой сМатывается, другой 10 наматывается, при этом рабочий орган начинает переметаться по подводному забою и разрабатыаает грунт.1осле первой проходки рабочего органа вдоль забоя вращение папильонажной лебедки переключают на противоположное, трос 10 начинает наматываться, а трос 11 сматываться, П(эи этом от натяжения троса 10 происходит самовыдвижение рабочего органа в сторону забоя на длину подачи равную EIJ. Перемещение рабочего органавдоль забоя прекращают когда полностью выбирают шаг раздвижки вЪа.сывающего пульпопоовода 3. то есть .когда (i- 0. После чего с помощью гидроцилиндра 16 подают корпус 1 земснаряда вперед на расстояние, равное шагу сбайного напорного механизма 2-. При этом от упора в забой рабочий орган 4 со всасывающим пульпопроводом 3 телескопически выглубляется на длину шага раздвижки Ir . Далее технологический процесс разработки подводного забоя повторяется. В процессе работы обеспечивается повышенная производительность земснаряда . Достигается это следующим образом. Благодаря тому, что рама 2 связана с выдвижным всасывающим пульпопроводом 3 общей трособлочной системой так, что конец каждого из тросов 10 и И папильонажной лебедки 7 охватывает всасывающий пульпопровод с возможностью самовыдвижения его в ч сторону забоя при папильонировании земснаряда, обеспечивается надежный постоянно заданный контакт рабочего органа с подводным забоем. Благодаря тому, что носовая часть корпуса 1 посредством гидроцилиндров соединена с двумя понтонами 9 установленными с возможностью раздвижки в диаметральной и мидель- i шпангоутной плоскости земснаряда в
59
зависимости от заглубления рабочего органа Ц, также достигается повышение производительности земснаряда, так как уменьшается влияние на. контакт рабочего органа с подводным забоем крена корпуса земснаряда, особенно при разработке глубоких забоев. Значительно упрощено управление земснарядом, так как папильонирование земснаряда об-ьединенр с телескопическим выдвижением рабочего органаи осуществляется только с помощью .одной лебедки 7. Кроме этого, заглубление рабочего органа объединено с раздвижкой понтонов 9 и выполняется посредством гидрораспределителя. Благодаря тому, что шаг раздвижки всасывающего пульпопровода f равен шагу свайного напорного механизма 2 и составляет не менее две длины подачи рабочего органа 8«j, значительно увеличились параметры (длина и ширина) разрабатываемого забоя с одной позиции земснаряда. Из-за того, что высасывающий пульпопровод выполнен в виде полого кожуха, уменьшен дифферент земснаряда и обеспечено эффективное выглубление рабочего органа, который к тому же стал менее металлоемок,
По окончанию работы всасывающий пульпбпрОвод с рабочим органом самовыглубляется (всплывает ) и гиДроцилиндрами 5 устанавливается в транспортное положение.
Внедрение данного земснаряда позволяет повысить его производительность путем обеспечения постоянного задан71 . 6 него контакта рабочего органа с подводным забоем и уменьшения влияния на него крена корпуса земснаряда.
Формула изобретения
1 . Земснаряд, включающий (сорпус с рамой и установленные на ней грунтозаборный рабочий орган и всасывающий пульпопровод, свайный напорный механизм, понтоны и механизм управления пульпопроводом, отличающийся тем, что, с целью повышения производительности земснаряда, он снабжен механизмом управления понтонами , выполненным в виде гидроцилиндров, а механизм управления пульпопроводом выполнен в виде папильо-. нежной лебедки с трособлочной системой, причем тросы охватывают конец пульпопровода, расположенный со стороны корпуса.
2.Земснаряд по п.1, отличающийся тем, что механизмы управления пульпопроводом и понтонами связаны посредством гидрораспределителя
3.Земснаряд по п.1, о т л и ч аю 1Д и и с я тем, что рама выполнена в виде полого кожуха.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 272210. кл; Е 02 F 3/88, 1968.
2.Авторское свидетельство СССР
Ч 68856it, кл. Е 02 F 3/90, 1978 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Землесосный снаряд | 1984 |
|
SU1145094A1 |
| УСТАНОВКА ДЛЯ ПОДВОДНОЙ ГИДРОДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2005 |
|
RU2272146C1 |
| УСТРОЙСТВО ДЛЯ ЗАБОРА ШЛАМА ИЗ ОТСТОЙНИКОВ | 1994 |
|
RU2117730C1 |
| Способ разработки грунта при строительстве каналов | 1983 |
|
SU1161630A1 |
| Землесосный снаряд | 1972 |
|
SU574506A1 |
| ТРОСОВОЕ УСТРОЙСТВО ДЛЯ РАБОЧИХ ПЕРЕМЕЩЕНИЙ ЗЕМСНАРЯДА ПРИ СТРОИТЕЛЬСТВЕ И ОЧИСТКЕ КАНАЛА ОТ НАНОСОВ | 2011 |
|
RU2473733C1 |
| Земснаряд с безьякорным папильонажем | 1978 |
|
SU688564A1 |
| Землесосный снаряд | 1985 |
|
SU1350269A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПАПИЛЬОНИРОВАНИЯ ЗЕМЛЕСОСНОГО СНАРЯДА С НАПОРНЫМ СВАЙНЫМ ХОДОМ | 1969 |
|
SU242761A1 |
| Безъякорный землесосный снаряд | 1989 |
|
SU1735504A1 |
/. гидрораспреде/tume/iw
