Область, к которой относится изобретение
Настоящее изобретение относится к способу и устройству, использующим устройство мобильной связи, включающее матричный датчик. В частности, настоящее изобретение относится к устройству мобильной связи, включающему два корпуса и матричный датчик.
Уровень техники
В настоящее время растет популярность расширенных приложений на устройствах мобильной связи. Например, мобильные телефоны могут включать приложения персонального органайзера, приложения доступа к Интернет, приложения сообщений и т.п. К сожалению, расширенные приложения могут потребовать вводов намного больше, чем имеется в наличии в устройстве. Например, обычная цифровая клавишная приставка не позволяет легко вводить буквенные знаки. Также ограниченная область поверхности устройства мобильной связи ограничивает число вводов, которые могут быть добавлены в устройство мобильной связи. Например, полная клавиатура персонального компьютера не может быть добавлена к устройству мобильной связи без ограничения его портативности. Таким образом, устройства мобильной связи не могут обеспечивать адекватных вводов для расширенных приложений.
Также, некоторые устройства мобильной связи используют закрывающий корпус, связанный с основным корпусом, где закрывающий корпус закрывает часть номеронабирателя или другой части основного корпуса. Например, закрывающий корпус, соединенный с основным корпусом, может вращаться или перемещаться относительно основного корпуса. К сожалению, пользователь теряет доступ ко многим функциям устройства мобильной связи, когда закрывающий корпус находится в закрытом положении поверх основного корпуса. Соответственно, эти устройства мобильной связи также не обеспечивают адекватных признаков пользовательского ввода.
Емкостные контактные площадки раскрываются в патенте США № 5565658, выданном 15 октября 1996 на имя Gerpheide et al., в патенте США № 5861875, выданном 19 января 1999 на имя Gerpheide, и в патенте США № 6222528 В1, выданном 24 апреля 2001 на имя Gerpheide et al. Эти контактные площадки раскрыты как замена мыши на портативных и настольных компьютерах. В частности, эти контактные площадки раскрыты как особенно полезные в качестве замены координатным устройствам на компьютерах, использующих полные клавиатуры и дисплеи, такие как мониторы или большие ЖКД (жидкокристаллические дисплеи) (LCD). К сожалению, такие компьютеры не пригодны для использования в качестве устройств мобильной связи из-за их ограниченной портативности. В частности, полные клавиатуры, мониторы и даже портативные компьютеры являются громоздкими для удобного ношения пользователем. Другая проблема состоит в том, что контактные площадки занимают относительно большую область пространства в добавление к клавиатурам и дисплеям. Таким образом, контактная площадка может добавить неудобство в ношении устройства, к которому эта контактная площадка прикрепляется, когда контактная площадка располагается вместе с полной клавиатурой и дисплеем.
Таким образом, есть необходимость в средстве для удобного ввода данных для расширенных приложений на устройстве мобильной связи.
Раскрытие изобретения
Изобретение обеспечивает устройство и способ, использующие устройство мобильной связи, включающее матричный датчик. Устройство может включать первый корпус, второй корпус и матричный датчик. Устройство может дополнительно включать контроллер, подключенный к матричному датчику. Контроллер может включать модуль определения изменения поля, компонуемого для определения изменения в поле через матричный датчик, и модуль регулирования параметра работы, компонуемого для регулирования параметра работы устройства на основе положения второго корпуса. Способ может включать шаги определения положения второго корпуса и регулирования чувствительности матричного датчика на основе положения второго корпуса. Матричный датчик может располагаться ниже цифрового номеронабирателя. Таким образом, изобретение обеспечивает удобный ввод данных на устройстве мобильной связи.
Краткое описание чертежей
Предпочтительные варианты настоящего изобретения будут описаны со ссылкой на нижеследующие фигуры, в которых соответствующими цифрами обозначены соответствующие элементы, при этом:
Фиг.1 является примерной иллюстрацией устройства мобильной связи согласно первому варианту выполнения;
Фиг.2 является примером, иллюстрирующим устройство мобильной связи согласно второму варианту;
Фиг.3 является примером, иллюстрирующим устройство мобильной связи согласно третьему варианту;
Фиг.4 является примером блок-схемы устройства мобильной связи согласно другому варианту;
Фиг.5 является примером, иллюстрирующим емкостный матричный датчик согласно одному варианту; и
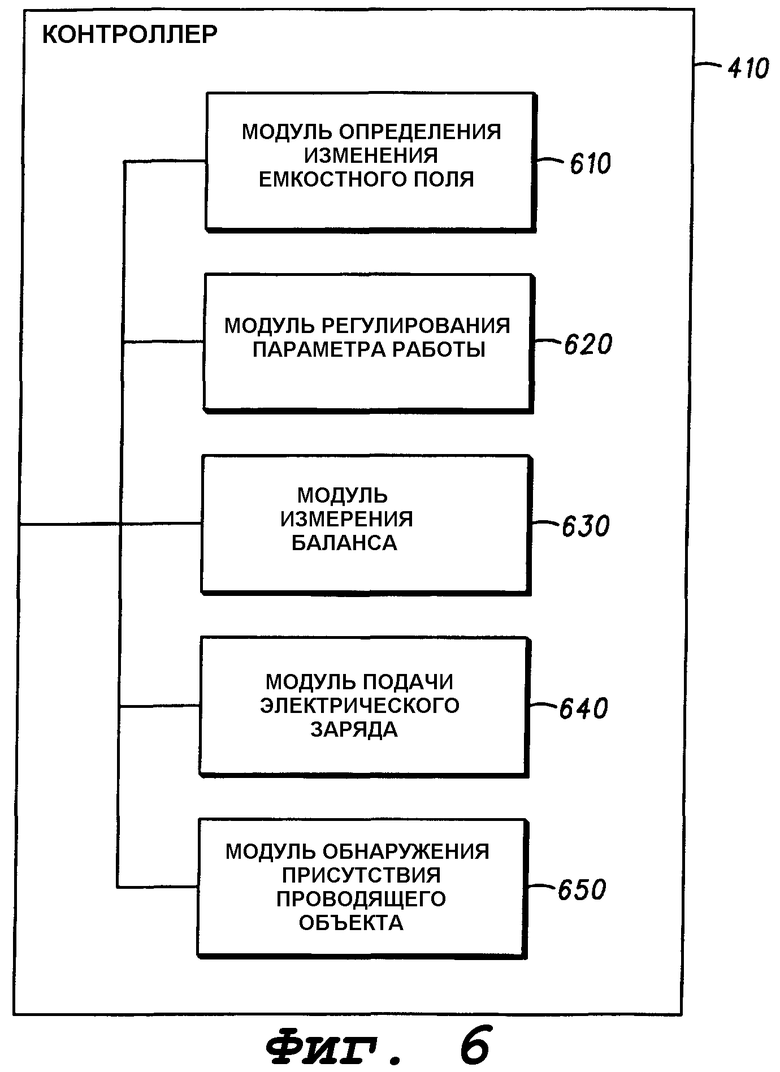
Фиг.6 является примером блок-схемы контроллера согласно одному варианту.
Осуществление изобретения
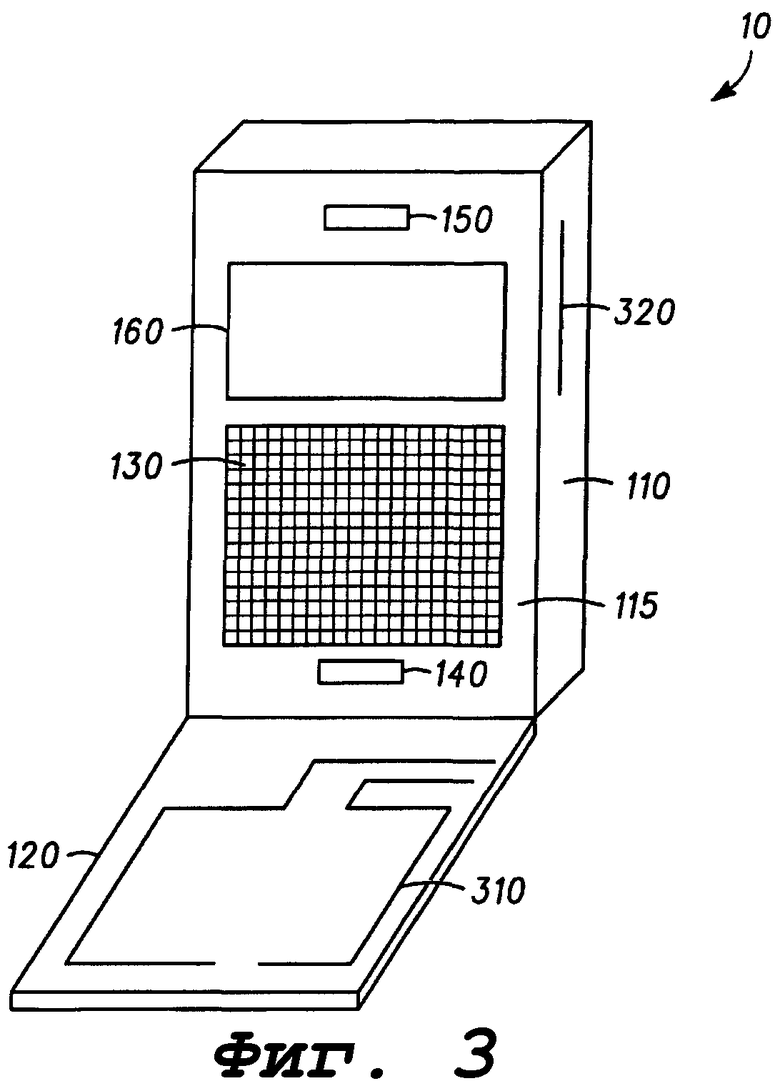
Фиг.1 является примерной иллюстрацией устройства 10 мобильной связи согласно первому варианту выполнения изобретения. Этот чертеж иллюстрирует один пример устройства 10 мобильной связи в открытом положении. Устройство 10 мобильной связи может включать первый корпус 110, включающий лицевую поверхность 115, второй корпус 120, контактную площадку или матричный датчик 130, номеронабиратель 135, аудио входное устройство 140, аудио выходное устройство 150 и визуально выходное устройство 160. Первый корпус 110 или второй корпус 120 могут включать различные комбинации матричного датчика 130, номеронабирателя 135, аудио входного устройства 140, аудио выходного устройства 150 и визуального выходного устройства 160. Номеронабиратель 135 может быть цифровой клавиатурой, а матричный датчик 130 может быть расположен ниже номеронабирателя 135. Устройство 10 мобильной связи не требует обязательно множества входных и выходных устройств. Например, в устройстве мобильной связи может использоваться только матричный датчик 130 для ввода и дисплей 160 для вывода.
Второй корпус 120 может быть соединен с первым корпусом 110 посредством вращательного соединительного средства, скользящего соединительного средства, съемного соединительного средства или какого-либо другого средства для соединения первого корпуса со вторым корпусом. Например, второй корпус 120 может вращаться вокруг или скользить вдоль лицевой поверхности первого корпуса 115 или может вращаться вдоль края первого корпуса 110. Аудио входное устройство 140 может быть микрофоном. Аудио выходным устройством 150 может быть громкоговоритель. Дисплей может быть ЖКД (жидкокристаллическим дисплеем) (LCD), СДД (светоизлучающим диодным дисплеем) (LED) или каким-либо другим дисплеем, используемым для отображения визуальной информации. В дисплей 160 может встраиваться подсветка для легкого просмотра отображаемой информации. Матричный датчик 130 может быть расположен ниже номеронабирателя 135 или тому подобного, расположенного на лицевой поверхности первого корпуса 115. Матричный датчик 130 может быть емкостным матричным датчиком, индуктивным матричным датчиком или любым другим датчиком, используемым для определения тесной близости объекта с матричным датчиком 130. Например, матричный датчик 130 может включать электроды, расположенные по х-оси и у-оси, которые печатаются на пластиковой подложке. Эти электроды могут заряжаться, и их зарядка может контролироваться, как описано ниже.
При работе устройство 10 мобильной связи может связываться с другими устройствами мобильной связи, базовыми станциями или с подобными устройствами. Аудио входное устройство 140 может получать аудиосигналы для передачи, а аудио выходное устройство 150 может получать сигналы связи в аудиоформате. Дисплей 160 может отображать визуальную информацию для пользователя устройства 10 мобильной связи, такую как набираемые телефонные номера, индикатор интенсивности сигнала, вводы телефонной книги, текстовые сообщения, изображения и другую полезную визуальную информацию. Второй корпус 120 может открываться с целью обеспечения доступа к по меньшей мере части или ко всей лицевой поверхности первого корпуса 115 или закрываться с целью закрытия лицевой поверхности первого корпуса 115. Матричный датчик 130 может быть настроен для обнаружения положения проводящего тела, такого как палец, на основе, например, изменения емкости в электродах. Чувствительность и диапазон, в котором тело изменяет емкость электрода, достаточные для того, чтобы быть обнаруженными, могут быть настроены от десятых долей миллиметра и до более 12 миллиметров. Например, когда второй корпус находится в открытом положении, матричный датчик 130 может изначально быть настроен на диапазон, при котором палец пользователя на внешней стороне лицевой поверхности корпуса 115 будет активировать его. Согласно другому примеру, матричный датчик 130 может сканироваться на наличие пальца, чтобы перейти в другой диапазон, который изменяет емкость для активации. Таким образом, изобретение может обеспечивать дополнительно вводную функцию для устройства 10 мобильной связи.
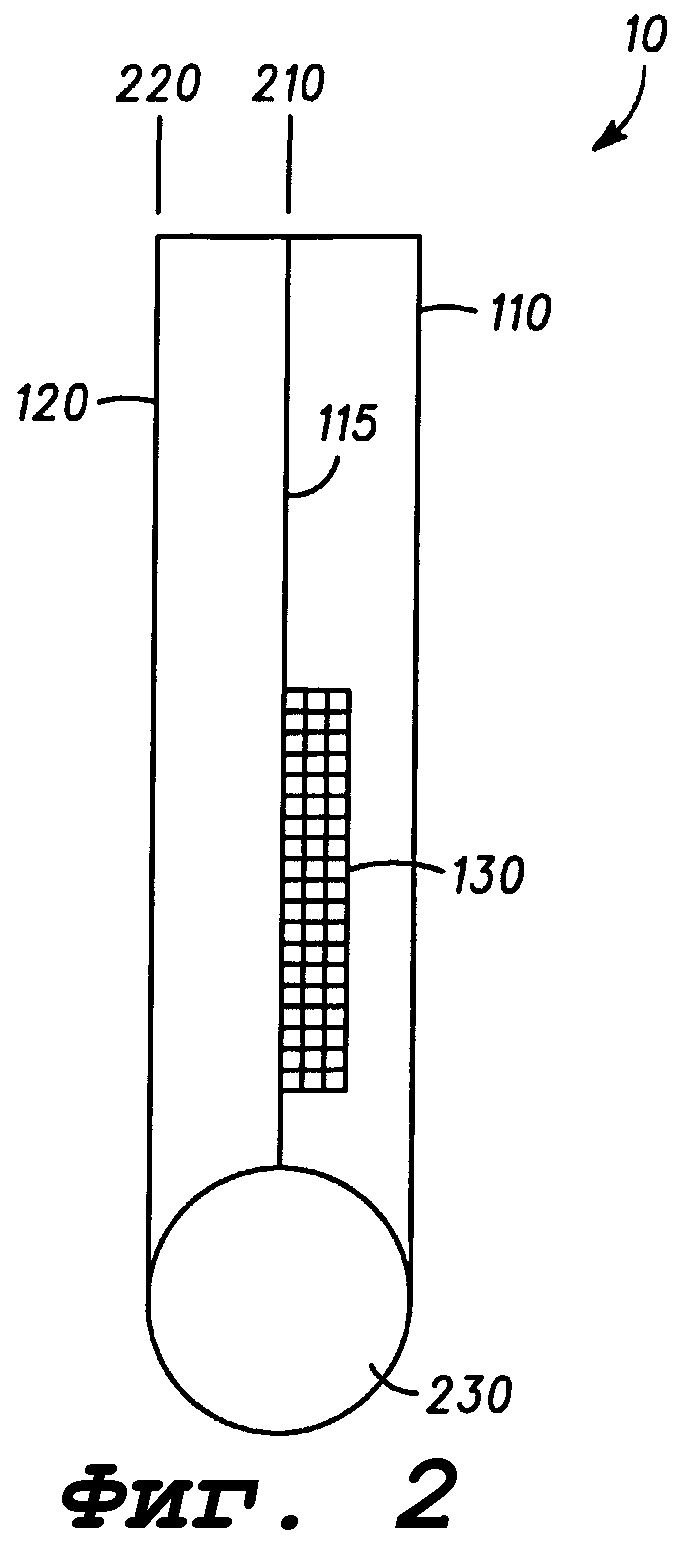
Фиг.2 является примерной иллюстрацией устройства 10 мобильной связи согласно второму варианту. Этот чертеж иллюстрирует один пример устройства 10 мобильной связи со вторым корпусом 120 в закрытом положении. Устройство 10 мобильной связи может включать ось 230 вращения для вращательного соединения второго корпуса 120 с первым корпусом 110. При работе, когда второй корпус 120 находится в закрытом положении, матричный датчик 130 может регулировать или увеличивать его чувствительность с первой чувствительности 210, соответствующей лицевой поверхности первого корпуса 115, до второй чувствительности 220, соответствующей внешней поверхности второго корпуса 240. Таким образом, изобретение может обеспечивать дополнительную вводную функцию, даже когда номеронабиратель 135 закрыт вторым корпусом 120, находящимся в закрытом положении. Например, второй корпус может включать маркировку для функции ввода. Дополнительно изобретение может обеспечивать распознавание ручной записи на внешней поверхности второго корпуса 120.
Матричный датчик 130 может также обнаруживать открытое или закрытое положение второго корпуса 120 с помощью проводящего элемента, расположенного во втором корпусе. Например, проводящий элемент может быть заранее заданной схемой, такой как антенна 310, как проиллюстрировано на фиг. 3. Альтернативно проводящий элемент может быть любой другой схемой, соединенной со вторым корпусом 120. Кроме того, ключ или другое устройство, пригодное для определения открытого или закрытого положения второго корпуса, может использоваться для определения открытого или закрытого положения. Также, когда обнаруживается открытое или закрытое положение, устройство 10 мобильной связи может перенастраивать схему сопряжения антенны, перенастраивать равновесие, переключать на другую антенну 320 или осуществлять какие-либо другие функции для улучшения действий, основанных на положении антенны.
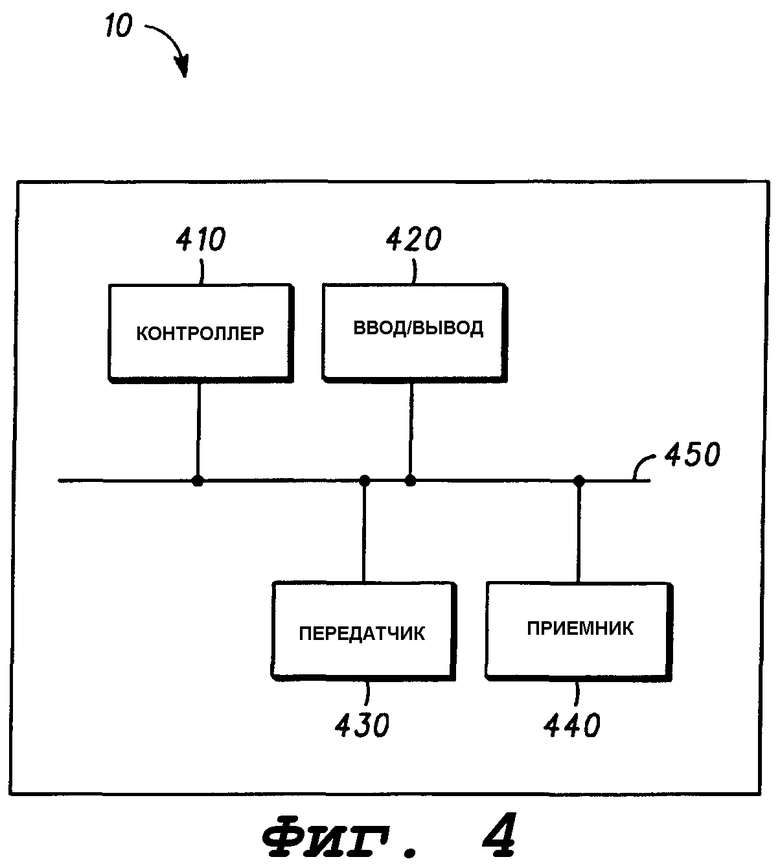
Фиг.4 является типичной блок-схемой устройства 10 мобильной связи согласно другому варианту. Устройство 10 мобильной связи может включать контроллер 410, схему 420 ввода/вывода, передающую схему 430, приемную схему 440 и шину 450. При работе шина 450 обеспечивает связь друг с другом различных схем и компонентов устройства 10 мобильной связи. Схема ввода/вывода обеспечивает интерфейс для устройств ввода/вывода, таких как матричный датчик 130, номеронабиратель 135, аудио входное устройство 140, дисплей 160 и аудио выходное устройство 150. Передающая схема 430 обеспечивает передачу сигналов связи к другим устройствам мобильной связи, базовым станциям или им подобным. Приемная схема 440 обеспечивает прием сигналов связи от других устройств мобильной связи, базовых станций или им подобных. Контроллер 410 управляет работой устройства 10 мобильной связи.
Согласно одному варианту, контроллер 410 определяет положение второго корпуса 120 и регулирует чувствительность матричного датчика на основе положения второго корпуса 120. Определяемое положение может быть закрытым положением, а матричный датчик 130 может быть емкостным матричным датчиком. Контроллер 410 может увеличивать чувствительность матричного датчика 130 для области вне второго корпуса 120 на основе закрытого положения второго корпуса 120. Контроллер также может перекалибровывать матричный датчик 130 с целью исключить воздействия любого металла, который может быть расположен на втором корпусе 120. Контроллер 410 может также определять открытое положение второго корпуса 120 и перерегулировать чувствительность матричного датчика 130 на основе открытого положения второго корпуса 120. Например, контроллер 410 может уменьшать чувствительность матричного датчика 130 к лицевой поверхности первого корпуса 115 на основе открытого положения второго корпуса 120. Контроллер 410 может определять положение второго корпуса 120 с помощью матричного датчика 130.
Согласно другому варианту, контроллер 410 может быть скомпонован для включения функции ввода данных, которая может разрешаться или не разрешаться. Например, пользователь может заблокировать функцию ввода данных, когда устройство 10 мобильной связи находится в кармане пользователя или в отсутствие активного использования устройства 10 мобильной связи. Таким образом, матричный датчик 130 не будет обнаруживать случайные проводящие объекты для целей ввода данных, когда такое восприятие не желательно. Разрешение и неразрешение функции ввода данных может осуществляться путем отжатия предназначенной клавиши, расположенной на первом корпусе 110 или втором корпусе 120 устройства 10 мобильной связи. Кроме того, так как на действие антенны могут влиять большие объекты, находящиеся поблизости, то контроллер 410 может быть скомпонован для обнаружения присутствия проводящего объекта, когда функция ввода данных заблокирована. Контроллер 410 может затем формировать слышимый тревожный сигнал или отображать сообщение на дисплее 160, когда обнаруживается проводящий объект. Таким образом, пользователь может быть информирован, например, когда устройство 10 мобильной связи находится в плохом положении для приема входящих вызовов. Например, когда устройство 10 мобильной связи расположено в кармане с антенной в перевернутом положении рядом с телом пользователя, может быть сформирован тревожный сигнал и отобразиться сообщение, объясняющее как обеспечить оптимальное действие устройства 10 мобильной связи. Другие объекты, которые могут вызывать тревожный сигнал, могут включать в себя кошельки, портфели, столы или любой другой объект, которые могут влиять на действие устройства 10 мобильной связи.
Согласно другому варианту, контроллер 410 может быть дополнительно скомпонован для активации экранной подсветки, расположенной внутри дисплея 160, когда обнаруживается проводящий объект. Например, подсветка может быть активирована для освещения дисплея, когда пользователь берет устройство 10 мобильной связи.
Согласно другому варианту выполнения матричный датчик 130 является емкостным матричным датчиком. Контроллер 410 воспринимает изменение емкостного поля через матричный датчик 130 на основе положения второго корпуса 120 путем использования заданного проводящего образца, расположенного во втором корпусе 120, и регулирует параметр работы устройства 10 мобильной связи на основе положения второго корпуса 120. Параметром работы может быть чувствительность работы емкостного матричного датчика 130. Также заранее заданным проводящим образцом может быть антенна 310, встроенная во второй корпус 120. Контроллер 410 может увеличивать чувствительность емкостного датчика 130 к области вне второго корпуса 120 на основе закрытого положения второго корпуса 120. Дополнительно контроллер 410 может перенастраивать устройство сопряжения антенны, расположенное в передающей схеме 430 или приемной схеме 440, на основе положения второго корпуса 120. Контроллер 410 может переключать работу с одной антенны 310 на другую антенну 320 на основе положения второго корпуса 120.
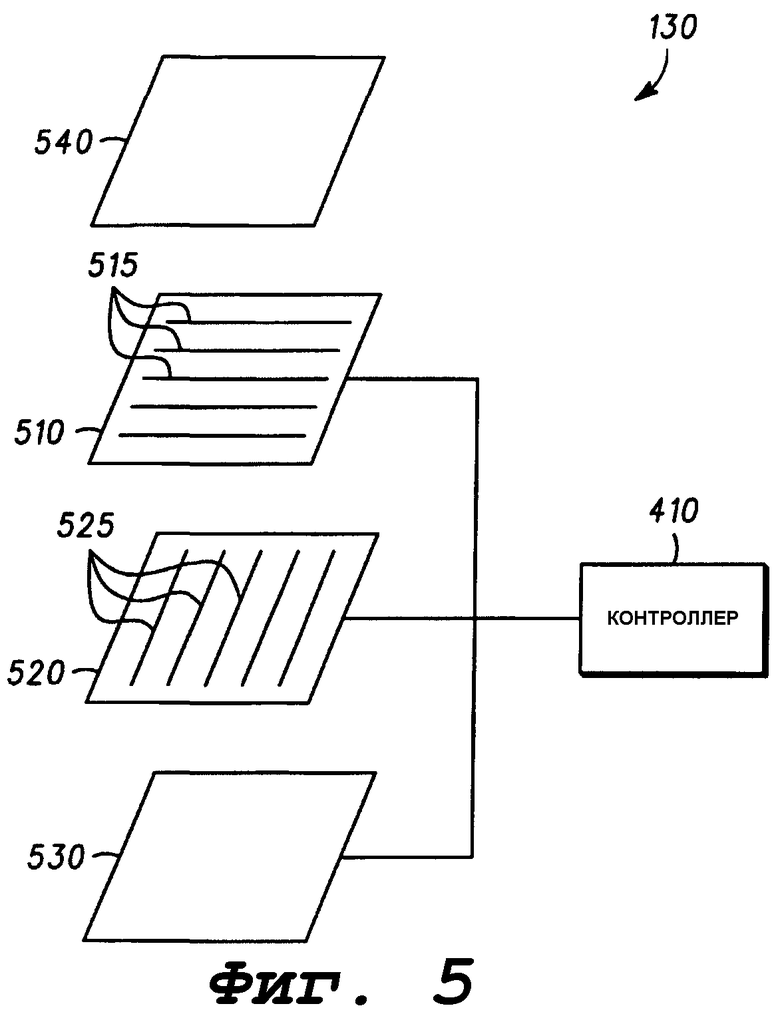
Фиг.5 является типичной иллюстрацией примера матричного датчика 130 в качестве емкостного матричного датчика 130, согласно одному варианту. Емкостный матричный датчик 130 может содержать первую электродную матрицу, включающую электроды 515, вторую электродную матрицу 520, включающую электроды 525, поверхность 540 контактной площадки и чувствительный электрод 530. Первая электродная матрица 510 может пересекать вторую электродную матрицу 520 электродами 515 первой матрицы перпендикулярно электродам 525 второй матрицы для определения области пересечения. Разделитель, такой как диэлектрик, изолятор, воздушный зазор или тому подобное, может отделять электродные матрицы 510 и 520.
При работе первая электродная матрица 510 может устанавливать электрическое поле совместно со второй электродной матрицей 520. Электрическое поле может также быть определено по отношению к чувствительному электроду 530. Чувствительный электрод 530 не является необходимым для работы электродных матриц 510 и 520. В частности, электрическое поле или емкость могут быть сформированы между электродными матрицами 510 и 520 без использования чувствительного электрода 530. Контроллер 410 может снабжать электрическими зарядами первую электродную матрицу 510 и вторую электродную матрицу 520 для образования электрического поля, при котором присутствует емкость между электродными матрицами 510 и 520 или между каждой электродной матрицей 510 и 520 и чувствительным электродом 530. Контроллер 410 может обнаруживать присутствие проводящего объекта в тесной близости к поверхности контактной площадки 540 на основе влияния проводящего объекта на емкость. Например, проводящий объект, такой как палец, в непосредственной близости к емкостному матричному датчику 130 может уменьшать емкость. Контроллер 410 может затем обнаруживать присутствие проводящего объекта путем измерения уменьшения емкости. Контроллер 410 может затем находить положение проводящего объекта на основе изменения в емкости, относящейся к рассматриваемым электродам 515 и 525.
Фиг.6 является примерной блок-схемой контроллера 410 согласно другому варианту. Контроллер 410 может включать в себя модуль 610 определения изменения емкостного поля, модуль 620 регулирования параметра работы, модуль 630 измерения баланса, модуль 640 снабжения электрическим зарядом и модуль 650 определения присутствия объекта. Эти модули могут быть схемой, программными алгоритмами, программируемыми логическими устройствами или тому подобным, расположенным в контроллере 410.
При работе модуль 610 определения изменения емкостного поля воспринимает изменение в емкостном поле через емкостный матричный датчик 130, а модуль 620 регулирования параметра работы регулирует параметр работы устройства 10 мобильной связи на основе положения второго корпуса 120. Модуль 620 регулирования параметра работы может регулировать чувствительность емкостного матричного датчика 130 на основе открытого или закрытого положения второго корпуса 120. Емкостный матричный датчик 130 может включать первую электродную матрицу 510 и вторую электродную матрицу 520, расположенную перпендикулярно к первой электродной матрице 510, для установления электромагнитного поля, соответствующего электродным матрицам. Модуль 630 измерения баланса может определять положение проводящего объекта на основе измеренного баланса между первой электродной матрицей 510 и второй электродной матрицей 520 емкостного матричного датчика 130. Модуль 640 подачи электрического заряда может снабжать электрическим зарядом первую электродную матрицу 510 и вторую электродную матрицу 520 для создания взаимной емкости между матрицами емкостного матричного датчика 130.
Модуль 650 определения присутствия проводящего объекта может воспринимать проводящий объект путем определения изменения в емкостном поле. Это изменение в емкостном поле может быть обнаружено путем измерения уменьшения общей емкости между первой электродной матрицей 510 и второй электродной матрицей 520. Модуль 620 регулирования параметра работы может также увеличивать чувствительность емкостного матричного датчика 130 к области вне второго корпуса 120 на основе положения второго корпуса 120. Модуль 610 определения изменения емкостного поля также может определять изменение в емкостном поле через емкостный матричный датчик 130 на основе закрытого положения второго корпуса 120, используя заданный проводящий образец.
Способ этого изобретения предпочтительно воплощается на программируемом процессоре. Однако работа контроллера 410 может также быть реализована на универсальном или специализированном компьютере, программируемом микропроцессоре или микроконтроллере и элементах периферийной интегральной схемы, ASIC (СИС - специализированной интегральной схемы) или другой интегральной схемы, аппаратной электронной или логической схемы, такой как схема дискретных элементов, на программируемом логическом устройстве, таком как ПЛУ (программируемое логическое устройство) (PLD - programmable logic device), ПЛМ (программируемая логическая матрица)(PLA - programmable logic array), ППВМ (программируемая пользователем вентильная матрица) (FPGA - field programmable logic array) или ПМЛ (программируемая матричная логика) (PAL - programmable array logic), или тому подобное. В общем случае какое-либо устройство, на котором находится конечный автомат, способный выполнять работу контроллера 410, может быть использовано для реализации функций процессора этого изобретения.
Хотя это изобретение описано его определенными вариантами осуществления, очевидно, что множество альтернатив, модификаций и вариантов будут ясны для специалиста. Например, различные составляющие вариантов могут взаимно заменяться, добавляться или сменяться другими составляющими других вариантов. Соответственно, предпочтительные варианты изобретения, как изложено здесь, предназначены для иллюстрации, но не для ограничения. Различные изменения могут быть сделаны без отклонения от сущности и объема изобретения.
Изобретение относится к устройствам мобильной связи, включающим матричный датчик. Устройство включает первый корпус, второй корпус, матричный датчик и контроллер, подключенный к матричному датчику. Контроллер включает модуль определения изменения поля, конфигурируемый для определения изменения поля через матричный датчик, и модуль регулирования характеристики работы, конфигурируемый для регулирования параметра работы устройства на основе положения второго корпуса. Способ включает этапы определения положения второго корпуса и регулирования чувствительности матричного датчика на основе положения второго корпуса. Техническим результатом является обеспечение удобного ввода данных для расширенных приложений на устройстве мобильной связи. 4 н. и 36 з.п. ф-лы, 6 ил.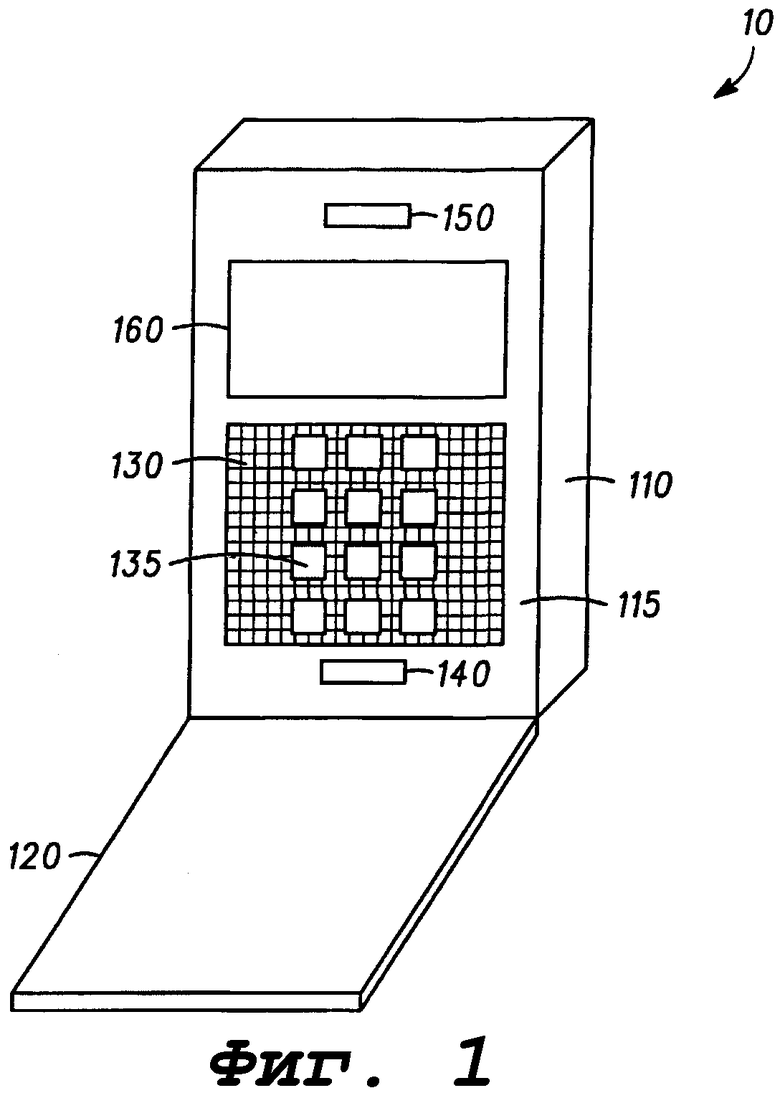
| US 5565658 А, 15.10.1996 | |||
| СКЛАДНОЙ ТЕЛЕФОННЫЙ АППАРАТ | 1989 |
|
RU2085049C1 |
| Способ очистки сточных вод производства фенопластов | 1960 |
|
SU131694A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

