Изобретение относится к области измерения неэлектрических величин электрическим методом и может быть использовано в авиационной технике, в частности в экспериментальной аэрогидродинамике, например, при исследованиях пограничного слоя на различных элементах летательных аппаратов и их моделей.
Известен визуальный способ определения расстояния «у» чувствительного элемента нити от поверхности тела с помощью оптических приборов (Wills J.A.B. The correction of hot-wire readings for proximity to a solid boundary. 1962, J.Fluid Mech., v.12, pp.388-396; Van Think N. On some measurements made by means of hot-wire in a turbulent flow near a wall. 1969, DISA Info., №7, pp.13-18).
Недостатками данного способа являются:
а) необходимость прозрачности пространства от прибора до тела (модели);
б) сложность (невозможность) размещения прибора возле тела (модели) и ограниченность его фокусного расстояния;
в) трудность проведения непрерывного контроля расстояния «у» в ходе плавного перемещения датчика по модели.
Наиболее близким из известных технических решений определения и контроля расстояния «у» в настоящее время можно считать тепловой способ, который имеет широкое применение в течение нескольких десятков лет (Zaric Z. Wall turbulence studies. 1972. Adv.Heat Transfer, vol.8, pp.285-350; Bhatia J.C., Durst F., Jovanovic J. Corrections of hot-wire anemometer measurements near walls. 1982. J.Fluid Mech. V.122, pp.411-413; Durst F. and others. In situ calibration of hot-wires close to highly heat conducting walls. 2001. Experiments in Fluids, v.31, pp.103-110).
При осуществлении этого способа проводят специальную калибровку, в ходе которой чувствительный элемент - нить датчика термоанемометра устанавливают параллельно поверхности тела, определяют реперную точку «yо»=0, т.е. нулевое расстояние между нитью и поверхностью тела, электрически нагревают нить до заданной температуры, т.е. сопротивления Rwo, измеряют соответствующие величины сигналов при нескольких расстояниях «у» чувствительного элемента в зоне отсутствия Ео=Rwo Jwo и наличия Е=Rwo Jw (у)=f(y) теплообмена между чувствительным элементом и телом, получая калибровочную зависимость в виде Е-Ео=Rwo [Jw(y)-Jwo]=f(lgy). При этом расстояние «у» измеряют микроскопом.
В ходе работы значение «у» определяют по соответствующим измеренным величинам Е и Ео.
Калибровка и работа проводятся в спокойной среде при неизменных ее параметрах: температуре нити и теплопроводности материалов тел. Так, в упомянутом выше прототипе опыты проводились в воздушной среде, температура которой сохранялась неизменной в пределах ±0,2°С, при перегреве нитей  где Rwo, Re сопротивления нагретой и холодной нити соответственно. Постоянство сопротивления Rwo=const, т.е. фактически температуры достигалось посредством специальной электронной схемы (аппаратуры).
где Rwo, Re сопротивления нагретой и холодной нити соответственно. Постоянство сопротивления Rwo=const, т.е. фактически температуры достигалось посредством специальной электронной схемы (аппаратуры).
Недостатками способа являются:
а) требование сохранения неизменными окружающих условий в течение калибровки, а затем и при работе, что особенно трудно выполнить относительно температурного режима;
б) необходимость поддержания постоянного сопротивления чувствительного элемента (Rwo=const) требует применения специальной уникальной аппаратуры;
в) используемая в способе зависимость сигналов в виде Е - Ео=f(lgy) имеет (для металлических тел) нелинейный характер: темп возрастания значений Е-Ео непрерывно повышается с приближением к поверхности. Представление реальной нелинейной зависимости Е-Ео=f(lgy) для некоторого диапазона «у» линейной в виде Е-Ео=А+Blgy, где А и В - соответствующие постоянные, снижает точность способа и исключает возможность экстраполяции калибровки за пределы диапазона: 0,03 мм ≤ y ≤ 0,150 мм.
Задачей предлагаемого изобретения является повышение точности измерения расстояния между телами и расширение области измерений при использовании более простых вседоступных технических средств.
Техническим результатом является обеспечение независимости калибровки и измерений от температурных условий, получение и использование линейной зависимости комбинации величин измеряемых сигналов Е(y), Ео от lgy в более широкой области «y» (y≤0,5 мм).
Этот технический результат достигается тем, что в тепловом способе измерения и контроля расстояния «y» между телами, заключающемся в том, что чувствительный элемент датчика, выполненный, например, в виде тонкой проволоки - резистивной нити, устанавливают параллельно поверхности тела, определяют реперную точку «yо»=0, размещают чувствительный элемент в зоне отсутствия теплового взаимодействия с телом, нагревают до заданной температуры tw, т.е. сопротивления Rwo посредством электрического тока Jw, измеряют соответствующие величины сигналов при нескольких расстояниях «у» от поверхности в зоне отсутствия Ео=Rwo Jwo и наличия E=Rwo Jw(y)=f(y) теплового взаимодействия между чувствительным элементом и телом с последующей подачей этих сигналов в измерительно-вычислительный блок, в рабочую схему включают последовательно, по крайней мере, не менее двух чувствительных элементов датчиков так, что постоянно обеспечивается равенство их токов нагрева Jwo, затем один из чувствительных элементов устанавливают в разные точки «у» ближе к телу, измеряют соответствующие величины сигналов Еo и Е=Jwo Rw(y)=f(y), получают зависимость вида  по которой затем осуществляют контроль и определяют расстояние «у», а реперную точку уо=0 находят посредством полученной зависимости
по которой затем осуществляют контроль и определяют расстояние «у», а реперную точку уо=0 находят посредством полученной зависимости
где А и В соответствующие постоянные.
На фиг.1 приведен пример принципиальной электрической схемы, иллюстрирующей технические возможности осуществления способа в случае применения двух одинаковых чувствительных элементов, где показано:
1 - источник питания;
2 - амперметр;
3 - регулируемое омическое сопротивление;
4 - чувствительный элемент №1;
5 - чувствительный элемент №2;
6 - электропереключатель;
7 - вольтметр;
8 - измерительно-вычислительный блок.
При осуществлении способа один из чувствительных элементов, например №1-(4), устанавливают параллельно поверхности тела. Его нагревают и выводят из зоны теплового взаимодействия с телом, что отмечается наступающим постоянством напряжения на нем и в обычных условиях имеет место при расстоянии у≥1,5-2,0 мм.
Регулируют величину тока нагрева нити Jw посредством буферного сопротивления 3 и устанавливают заданную температуру tw, т.е. сопротивление Rwo. При отсутствии теплообмена напряжения (сигналы) 7 на обоих чувствительных элементах 4 и 5 будут одинаковыми: E4=Jwo Rwo4=E5=Jwo·Rwo5. Последующее перемещение чувствительного элемента №1-(4) в зону теплового взаимодействия с телом приведет к падению его сопротивления. При достаточно большой величине сопротивления 3 величина тока Jwo остается практически неизменной и всегда равной для обоих чувствительных элементов: Е5=Ео5, Е4=Jwo·Rw4(у)=f(y). Соответствующие значения Ео5, Е4(y) измеряют вольтметром 7.
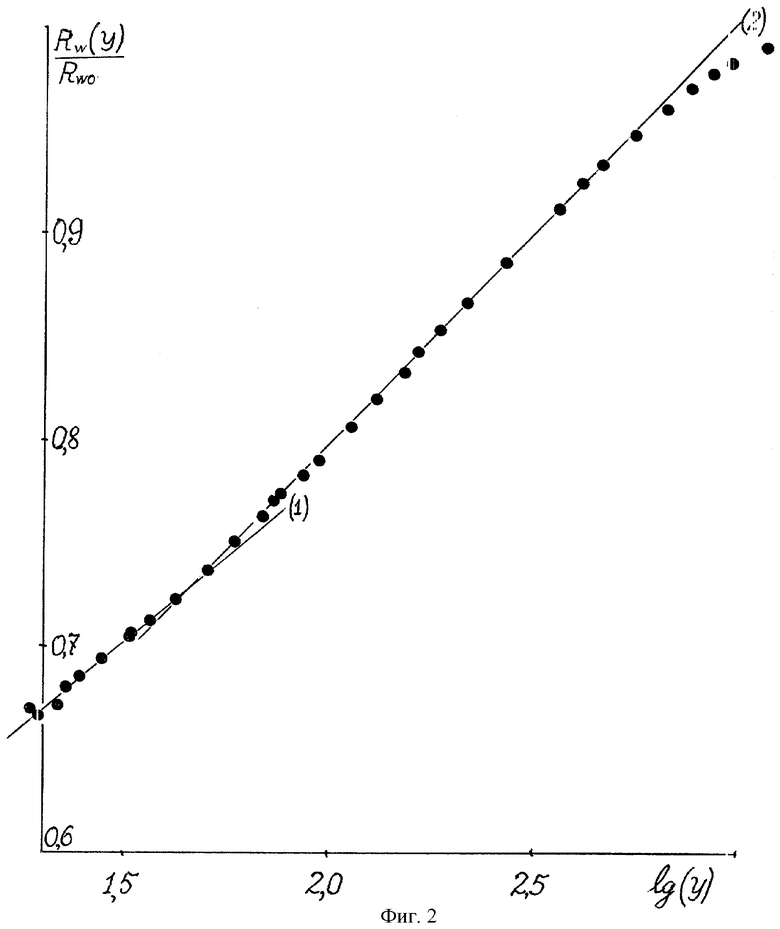
На фиг.2 приведен пример предлагаемой калибровки в виде графической зависимости

Калибровка была проведена у алюминиевой пластины с чувствительным элементом из платиновой нити-проволоки диаметром 22 мкм, длиной около 250 калибров и током Jwo=190,45 мА, Row=2,84 Ом, Re=1.33 Ом. Видно, что зависимость  имела вид
имела вид  с различными величинами коэффициентов А и В для двух диапазонов «у»:
с различными величинами коэффициентов А и В для двух диапазонов «у»:
(1) при у≤50мкм А=0,4587, В=0,1629 и
(2) 50 мкм ≤ y ≤ 500 мкм А=0,387, В=0,205.
В зоне у≥500мкм зависимость нелинейная.
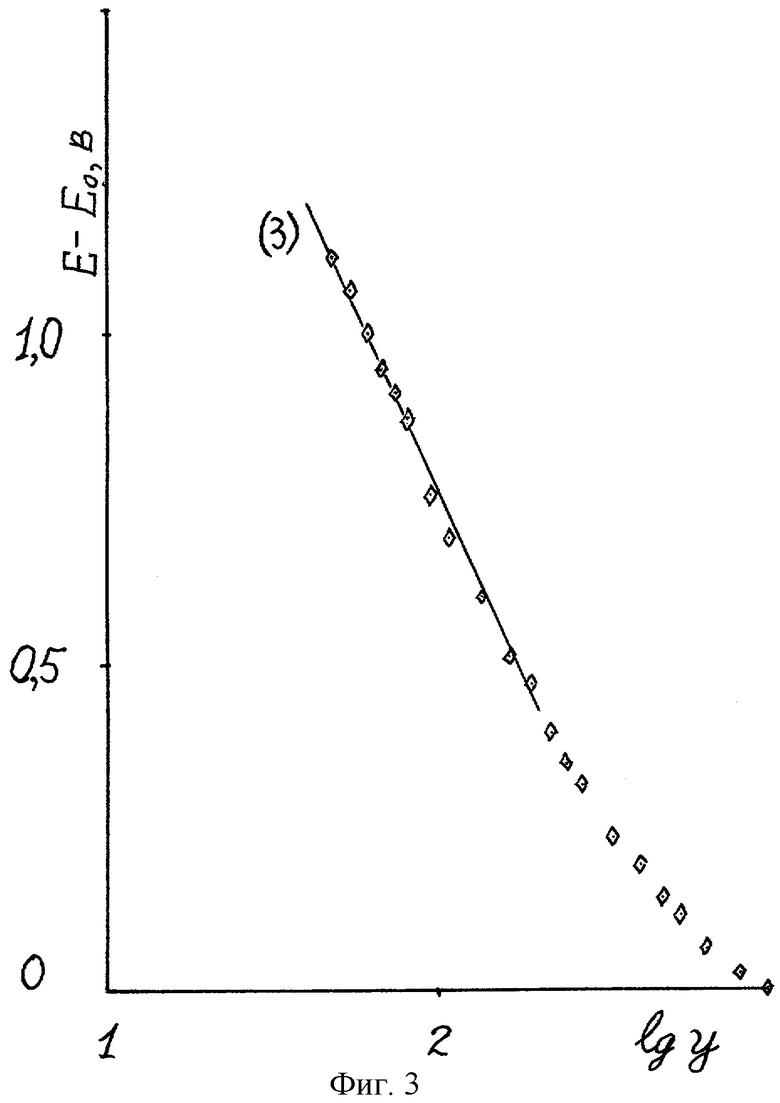
На фиг.3 приведены результаты калибровки в известном - традиционном виде Е-Ео=f(lgy), (Durst F. and others. 2001. Exp. Fluids. V.31, pp.103-110).
Для работы использовалась часть калибровочной зависимости 1,68 ≤ lg (y) ≤ 2,3, интерпретируемой линейной зависимостью:
(3) Е-Ео=2,9748-1,10241g (y), где Е и Ео - сигнал датчика в В., у - расстояние в мкм.
(4) проведенные специальные исследования показали, что зависимость вида Е-Ео=f(lgy) не имеет линейного диапазона; темп возрастания величины ΔЕ непрерывно увеличивается с уменьшением расстояния чувствительного элемента до поверхности тела - «у».
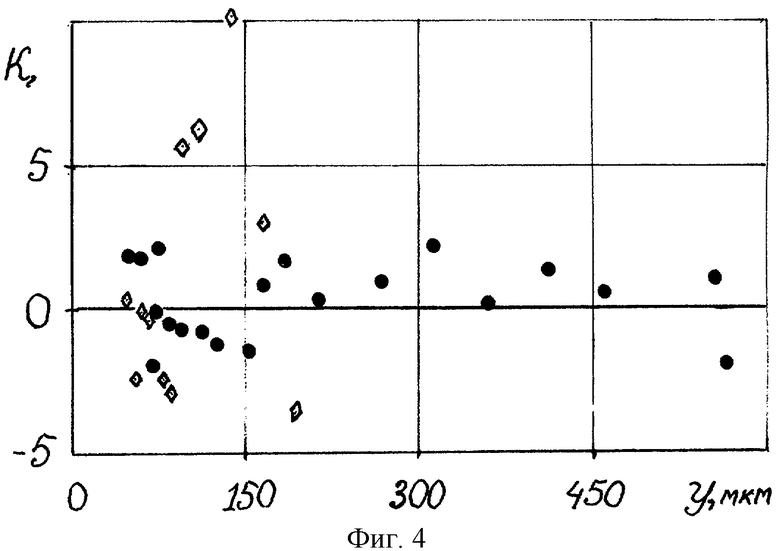
На фиг.4 приведена зависимость коэффициента «К» (в%), характеризующего точность измерения расстояния «у»: для прототипа - ромбовидные символы ( ) и для предлагаемого способа - темные кружки (•):
) и для предлагаемого способа - темные кружки (•):
где yр - расчетные, yu - измеренные значения расстояния.
Из графиков фиг.4 видно, что для прототипа () разброс ΔК=Kmax-Кmin≈14%, а в случае предлагаемого способа (•) - ΔК≤4%, то есть предлагаемый способ обеспечивает 3-4-кратное повышение точности при более чем трехкратном расширении диапазона - области измерений и без применения какой-либо специальной аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕПЛОВОЙ СПОСОБ ИЗМЕРЕНИЯ И КОНТРОЛЯ РАССТОЯНИЯ МЕЖДУ ТЕЛАМИ | 2004 |
|
RU2279037C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ТЕЧЕНИЯ В ПОГРАНИЧНОМ СЛОЕ И СПОСОБ ЕГО РАБОТЫ | 2008 |
|
RU2382367C1 |
| ОПТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ СИЛЫ | 1996 |
|
RU2115100C1 |
| СПОСОБ ГРАДУИРОВКИ ПРИБОРОВ ТЕПЛОВИЗИОННЫХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2755093C1 |
| Устройство измерения углов поворота глаза | 1985 |
|
SU1438691A1 |
| Способ определения давления газа и устройство для его осуществления | 1986 |
|
SU1364934A1 |
| Способ измерения объемного расхода в вихревых расходомерах | 2019 |
|
RU2717701C1 |
| Способ поверки устройства для калибровки термопреобразователей | 1984 |
|
SU1290101A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОГО ДАВЛЕНИЯ В НЕКАЛИБРОВАННОЙ КАМЕРЕ ВЫСОКОГО ДАВЛЕНИЯ | 2015 |
|
RU2614197C2 |
| СПОСОБ ИСПЫТАНИЙ СИСТЕМ, СОДЕРЖАЩИХ ЭЛЕКТРОВЗРЫВНЫЕ УСТРОЙСТВА, НА СТОЙКОСТЬ К ВОЗДЕЙСТВИЮ ВНЕШНИХ ЭЛЕКТРОМАГНИТНЫХ ПОЛЕЙ В СОСТАВЕ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2593521C1 |
Изобретение относится к области измерения неэлектрических величин электрическими методами и может быть использовано, например, при исследованиях пограничного слоя на элементах летательных аппаратов и их моделей. Способ основан на зависимости тепловых потерь нагретой нити от ее расстояния «у» до холодного тела. Мерой тепловых потерь нити служит величина сигнала электрического напряжения E=f(y) вблизи тела. Вдали от тела (у>2 мм) величина сигнала Е=Ео сохраняется постоянной. В процессе калибровки и работы используют два чувствительных элемента, включенных в измерительную схему последовательно. Контроль ведут по полученной зависимости вида 
где Rw(y) - сопротивление чувствительного элемента при расстоянии «у» от тела, Rwo - сопротивление чувствительного элемента в зоне отсутствия теплового взаимодействия с телом. Технический результат: обеспечение независимости калибровки и измерений от температурных условий, получение и использование линейной зависимости в более широкой области «y» (y≤0,5 мм). 4 ил.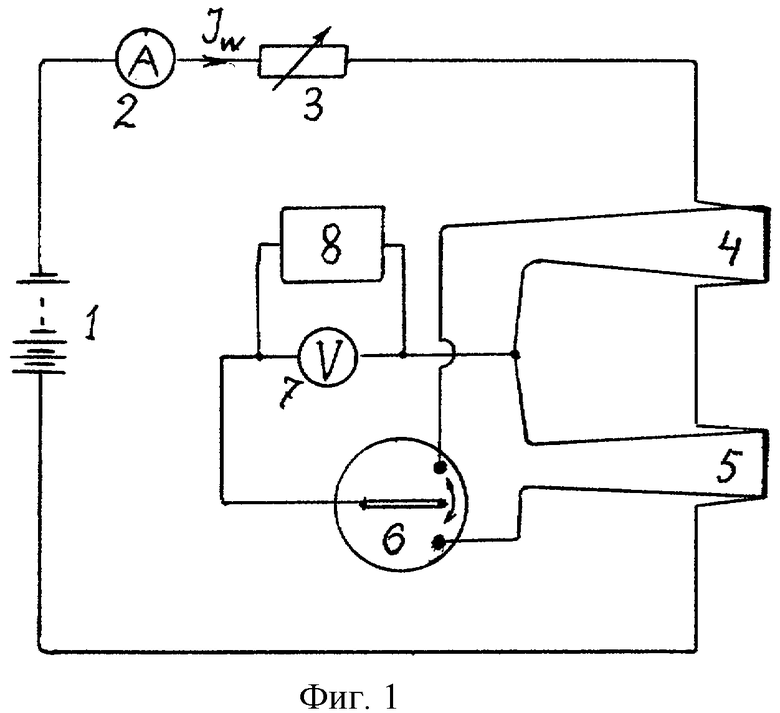
Тепловой способ измерения и контроля расстояния между телами, заключающийся в том, что чувствительный элемент датчика, выполненный в виде тонкой проволоки - резистивной нити, устанавливают параллельно поверхности тела, определяют реперную точку «yо»=0, размещают чувствительный элемент в зоне отсутствия теплового взаимодействия с телом, нагревают до заданной температуры tw, т.е. сопротивления Rwo, посредством электрического тока, измеряют соответствующие величины сигналов чувствительного элемента при нескольких расстояниях «у» от поверхности в зоне отсутствия Eo=Rwo Jwo и наличия E=f(y) теплового взаимодействия между чувствительным элементом и телом с последующей подачей этих сигналов в измерительно-вычислительный блок, отличающийся тем, что дополнительно используют второй чувствительный элемент, последовательно включенный с первым так, что постоянно обеспечивается равенство их токов нагрева Jwo, затем один из чувствительных элементов устанавливают в разные точки «у» в зоне теплового взаимодействия с телом, измеряют соответствующие величины сигналов чувствительных элементов Eо и E=Jwo Rw (y)=f(у), получают зависимость вида 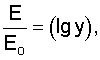 по которой затем осуществляют контроль и определяют расстояние «y».
по которой затем осуществляют контроль и определяют расстояние «y».
| Устройство для измерения расстояния между двумя элементами | 1975 |
|
SU529361A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 1991 |
|
RU2023978C1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| DURST F | |||
| and others | |||
| In situ calibration of hot-wires close to highly heat conducting walls, Experiments in Fluids, 2001, v.31, pp.103-110. | |||

