Изобретение относится к летательным аппаратам, транспортируемым другими летательными аппаратами.
Известна многоступенчатая ракета, содержащая первую ступень, имеющую первое средство создания тяги и систему терминального управления первым средством создания тяги при движении по траектории, вторую ступень, имеющую средство создания тяги и систему терминального управления вторым средством создания тяги при движении по траектории, средство крепления первой ступени к самолету, предназначенное для отделения ракеты от самолета в полете, и космический аппарат /Патент США № 4901949/.
Устройство управления первым средством создания тяги при движении по траектории на высоте 12-23 км использует аэродинамические поверхности и предназначено для реализации траектории полета ракеты с горизонтальным пуском с самолета в атмосфере с использованием терминальной системы управления, учитывающей величину максимально допустимой нагрузки на конструкцию, а также максимально допустимый аэродинамический нагрев конструкции под воздействием скоростного напора.
Устройство управления вторым средством создания тяги при движении по траектории не использует аэродинамические поверхности и предназначено для реализации траектории полета ракеты, где плотность атмосферы меньше, с использованием терминальной системы управления, позволяющей получить минимальное отклонение от заданной траектории полета в момент выключения двигателя.
Однако в устройстве управления первым средством создания тяги при движении по траектории используется система управления, не учитывающая фактическую величину скоростного напора, что не позволяет полностью использовать прочностные характеристики конструкции.
Известен многорежимный самолет авиационного ракетно-космического комплекса, предназначенный для запуска ракеты с космическим аппаратом и включающий планер, выполненный по интегральной схеме с плавным сопряжением фюзеляжа и крыла, цельноповоротное горизонтальное и вертикальное оперения, силовую установку /RU 2175934 С2/.
Известна авиационно-космическая система, содержащая самолет и многоступенчатую ракету, имеющую две ступени с терминальным управлением и предназначенную для реализации способа запуска космического аппарата /RU 2160215 С1/.
При запуске космических аппаратов посредством известных многоступенчатых ракет, запускаемых в полете с самолета, возникают значительные потери энергии как двигателей ступеней ракеты, так и двигателей самолета.
Задачей изобретения является уменьшение неблагоприятных последствий от потерь, связанных с аэродинамическим сопротивлением, потерями энергии из-за действия гравитационных сил и снижения тяги при работе ракетных двигателей первой и второй ступеней многоступенчатой ракеты на нерасчетных режимах.
Другой задачей изобретения является использование энергетического вклада самолета для предварительного разгона многоступенчатой ракеты.
Кроме того, задачей изобретения является создание комплекса для оперативного вывода на орбиту малого наклонения космического аппарата, для которого не требуются наземные средства обеспечения старта, которые ограничивают в географическом плане место базирования самолета, а, следовательно, место, азимут и наклонение орбиты.
Для решения указанных задач предлагается компромисс между потерями тяги при изменении направления вектора тяги и аэродинамическими потерями. Поскольку конечное положение в полете по тангажу для круговых и эллиптических орбит является горизонтальным, то носители ракет должны совершать программируемый разворот от своего начального направления полета к полету, близкому к горизонтальному, чтобы достичь конечного орбитального положения в полете.
Выполнение разворота с минимальными потерями необходимо проводить на относительно малой скорости.
Нагрузки на конструкцию и аэродинамический нагрев конструкции мешают осуществлению идеальной траектории полета при выполнении задач при запуске ракеты в атмосфере.
Соображения, связанные с аэродинамическими нагрузками, указывают на целесообразность вертикального старта. При этом большая часть поворота ракеты от вертикального к конечному горизонтальному положению происходит после того, как величина аэродинамической нагрузки достигнет максимальной величины.
Эффективность ракетного двигателя повышается с увеличением степени расширения сопла. Потери тяги, обусловленные изменением давления атмосферы по высоте, заставляют проектировать ракетные двигатели со степенью расширения сопла, обеспечивающей эффективность меньше максимальной, чтобы повысить располагаемую тягу в более плотных (более низких) слоях атмосферы.
Для решения указанных задач предложена многоступенчатая ракета, предназначенная для пуска с самолета в полете, содержащая при последовательном соединении первую ступень, имеющую первое средство создания тяги, расположенное в хвостовой части ракеты, и систему управления первым средством при движении по траектории, вторую ступень, имеющую второе средство создания тяги и систему управления вторым средством при движении по траектории, средство крепления первой ступени к самолету, предназначенное для отделения ракеты от самолета в полете, и космический аппарат, расположенный в головной части ракеты.
Средство создания тяги первой ступени выполнено с возможностью управления вектором тяги с ограничением по величине скоростного напора, действующего на головную часть, при этом средство создания тяги второй ступени выполнено с возможностью терминального управления направлением и величиной импульса тяги, позволяющего уменьшить величину отклонения космического аппарата от заданной траектории в момент выключения двигателя.
Последовательное использование первой ступени с возможностью управления с ограничением по величине скоростного напора и второй ступени с терминальным управлением позволяет уменьшить неблагоприятные последствия от потерь, связанных с аэродинамическим сопротивлением, потерями энергии из-за действия гравитационных сил и снижения тяги при работе ракетных двигателей первой и второй ступеней на нерасчетных режимах.
Средство создания тяги первой ступени выполнено в виде ракетного двигателя твердого топлива, имеющего сопло и привод отклонения сопла для управления вектором тяги.
Ракета снабжена сбрасываемым обтекателем, состоящим из двух частей, расположенных в головной части вокруг космического аппарата.
Ракета снабжена датчиками скоростного напора воздуха, расположенными на каждой из частей обтекателя.
Для управления вектором тяги с ограничением по величине скоростного напора может быть использована система датчиков давления по заявке ЕПВ № 1256812.
Средство создания тяги второй ступени выполнено в виде ракетного двигателя твердого топлива, имеющего сопло и привод отклонения сопла для терминального управления вектором тяги.
Для терминального управления вектором тяги ракетного двигателя второй ступени может быть использована известная система формирования терминального управления выведением разгонного блока ракеты на заданную орбиту по патенту РФ 2232894.
Космический аппарат может быть снабжен средством создания тяги, предназначенным для точной доводки параметров орбиты космического аппарата.
Ракета снабжена первыми элементами отделения первой ступени, вторыми элементами отделения второй ступени и третьими элементами отделения третьей ступени с космическим аппаратом.
Средство создания тяги третьей ступени выполнено в виде ракетного двигателя на жидком топливе с фиксированным направлением вектора тяги.
Средство крепления первой ступени к самолету имеет, по меньшей мере, один бугель.
Одновременно предлагается самолет, предназначенный для запуска по траектории ракеты с полезной нагрузкой в полете и содержащий фюзеляж, средство создания тяги для приведения в движение, аэродинамические поверхности для создания подъемной силы, средство для управления полетом, средство сопряжения фюзеляжа с ракетой, предназначенное для отделения ракеты от самолета в полете, навигационное и пилотажное оборудование.
Самолет выполнен с возможностью отделения в полете многоступенчатой ракеты от фюзеляжа самолета.
Аэродинамические поверхности, предназначенные для создания подъемной силы, выполнены в виде крыла трапециевидной формы в плане и горизонтального оперения из двух цельноповоротных консолей.
Самолет снабжен вертикальным оперением в виде двух килей с рулями направления.
Средство создания тяги выполнено в виде двух двухконтурных турбореактивных двигателей с форсажной камерой и регулируемым соплом, которые размещены в общей мотогондоле в хвостовой части фюзеляжа.
Самолет снабжен по бокам носовой части фюзеляжа двумя регулируемыми воздухозаборниками с горизонтальным расположением клина.
Самолет снабжен инерциально-спутниковой навигационной системой.
Самолет снабжен средствами предстартового контроля, пуска и управления полетом ракеты.
Средство сопряжения самолета с ракетой выполнено в виде авиационного пускового устройства, включающего три замковых устройства.
Два замковых устройства расположены в передней части симметрично плоскости симметрии самолета, а одно замковое устройство расположено в задней части фюзеляжа в плоскости симметрии фюзеляжа самолета.
Для решения поставленной задачи предлагается также авиационно-космический комплекс, предназначенный для запуска по траектории космического аппарата, содержащий многоступенчатую ракету, самолет и средство сопряжения фюзеляжа самолета с ракетой, предназначенное для отделения ракеты от самолета в полете.
Дополнительно для решения поставленной задачи предлагается способ запуска по траектории космического аппарата, включающий выведение многоступенчатой ракеты с космическим аппаратом в требуемую точку пуска, позволяющую достичь требуемой орбиты, определяемой наклонением и восходящим узлом первой орбиты, при выведении с боковым отклонением посредством самолета, имеющего средство создания тяги, в восходящий узел траектории ракеты; отделение ракеты от самолета, движение ракеты по траектории при управлении вектором тяги.
При реализации способа полет самолета в направлении траектории выведения космического аппарата осуществляют таким образом, что суммарная энергия самолета в момент старта ракеты вносит вклад в энергию космического аппарата на траектории выведения.
Управляют средством создания тяги первой ступени ракеты таким образом, чтобы выполнялось заданное ограничение на скоростной напор.
Управляют средством создания тяги второй ступени посредством системы терминального управления, позволяющей уменьшить отклонение от заданной траектории в момент выключения двигателя.
Ракету запускают с самолета на высоте 17-19 километров при скорости полета 640-660 м/сек в процессе выполнения предпускового маневра с углом наклона траектории 15-17 градусов.
После пуска ракеты самолет сохраняет курс для приема телеметрической информации с ракеты.
Носовой обтекатель ракеты сбрасывают на высоте 80-100 километров.
Изобретение поясняется чертежами.
Фиг.1 Общий вид многоступенчатой ракеты.
Фиг.2 Схема управления вектором тяги двигателя первой ступени.
Фиг.3 Схема управления вектором тяги двигателя второй ступени.
Фиг.4а Самолет. Вид сбоку.
Фиг.4б Самолет. Вид в плане.
Фиг.4в Самолет. Вид на носовую часть.
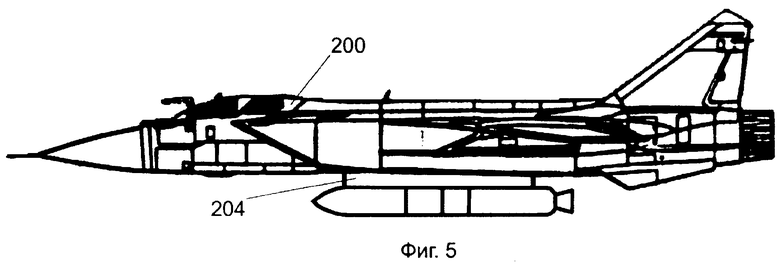
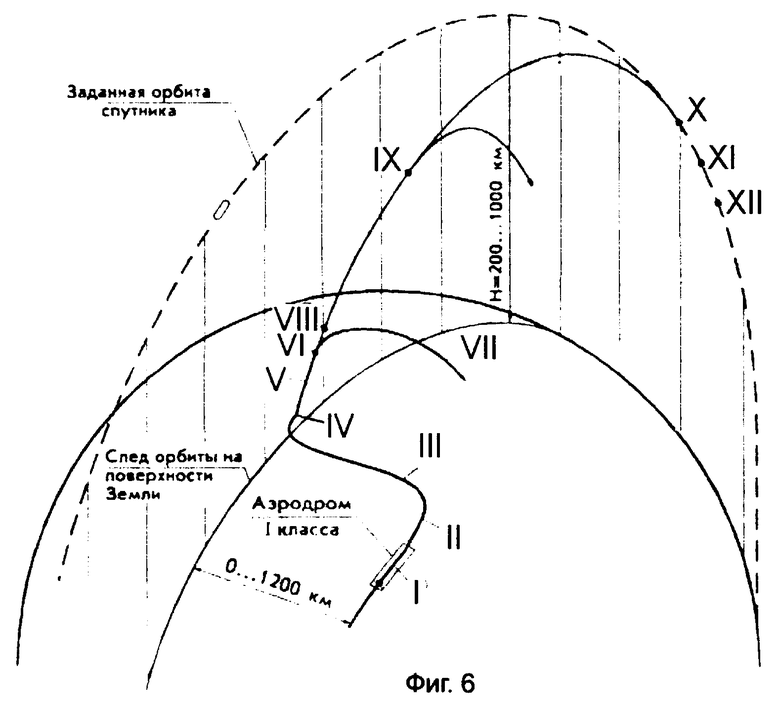
Фиг.5 Самолет с прикрепленной ракетой перед пуском. Фиг.6 Схема траектории запуска космического аппарата.
Многоступенчатая ракета (Фиг.1) содержит первую ступень 10, вторую ступень 20 и третью ступень 30, имеющие первый, второй и третий двигатели 19, 29 и 39, соответственно.
Первая и вторая ступени 10, 20 соединены смежными торцами посредством элементов первого переходного отсека 15, предназначенных для отделения первой ступени 10 после прекращения работы двигателя первой ступени в полете.
Вторая и третья ступени 20, 30 соединены смежными торцами посредством элементов второго переходного отсека 25, предназначенных для отделения второй ступени 20 после прекращения работы двигателя второй ступени в полете.
Первая и вторая ступени 10, 20 имеют ракетные двигатели 19, 29 твердого топлива.
Третья ступень 30, включающая космический аппарат 40 и жидкостный ракетный двигатель 39, соединена с торцом третьего переходного отсека 34.
Сопла 12, 22 и 32 расположены в хвостовой части первой, второй и третьей ступеней 10, 20 и 30 соответственно.
Сопло 12 первой ступени 10 имеет степень расширения 40 и шарнирно закреплено с возможностью поворота.
Сопло 22 второй ступени 20 имеет степень расширения 80 и шарнирно закреплено с возможностью поворота.
Нерегулируемое сопло 32 третьей ступени 30 имеет степень расширения 60 и неподвижно закреплено.
На первой ступени 10 установлен привод 13 поворота сопла 12 для изменения вектора тяги при управлении по тангажу и рысканию.
Скоростной напор является фактором, определяющим нагрузки, действующие на конструкцию ракеты. На начальном этапе автономного полета ракеты величина скоростного напора достаточно большая и есть опасность превышения заданного ограничения величины нагрузки от скоростного напора.
Система управления должна обеспечивать реализацию величины скоростного напора в пределах ограничения.
Предлагаемый способ управления полетом ракеты основан на формировании управляющего сигнала в функции отклонения текущего значения скоростного напора, измеряемого системой датчиков полного давления, от его программного значения, рассчитанного при формировании полетного задания.
Для реализации этого способа управления (фиг.2) на носовом обтекателе установлена система датчиков 36 полного давления. Информация с датчиков 36 полного давления обрабатывается микропроцессором 37 и сформированная величина скоростного напора передается в вычислитель системы управления 38. В вычислителе рассчитывается отклонение этой величины от текущего программного значения и определяется угол поворота сопла 12 двигателя первой ступени для компенсации этого отклонения. Величина угла поворота передается на вход привода сопла 13.
На второй ступени 20 установлен привод 23 поворота сопла 22 для изменения вектора тяги при управлении по тангажу и рысканию.
На основе данных о координатах и составляющих вектора скорости центра масс ракеты, измеряемых инерциально-спутниковой навигационной системой, в вычислителе системы управления 38 рассчитывается угол поворота сопла 22 двигателя второй ступени с использованием алгоритма терминального управления. Рассчитанная величина угла поворота сопла обеспечивает компенсацию прогнозируемого конечного промаха (промаха в момент выключения двигателя ступени) по координатам центра масс и составляющим вектора скорости. Величина угла поворота передается на вход привода сопла 23.
На третьей ступени 30 установлены струйные рули, использующие сжатый газ, для управления по тангажу и рысканию.
Бортовое радиоэлектронное оборудование наведения и инерциально-спутниковая навигационная система размещены в отсеке 34 третьей ступени 30.
Обтекатель 38 третьей ступени 30 включает части 38а, 38б, воспринимающие аэродинамическую нагрузку и тепловой поток.
На третьей ступени 30 установлен механизм (не показан) принудительного сброса обтекателя 38 после включения двигателя 29 второй ступени 20.
Ракета выполнена с возможностью крепления к самолету 200 с помощью авиационного пускового устройства 204 под фюзеляжем на расстоянии, выбранном с учетом аэродинамической интерференции, высоты над землей и отрыва колеса при разбеге.
В авиационное пусковое устройство включены механизм отделения для пуска ракеты в полете и средства для сброса ракеты даже в случае отказа.
Самолет 200 содержит фюзеляж 201, два двигателя 202 в качестве средств создания тяги для приведения в движение, крыло 203, аэродинамические поверхности консолей которого предназначены для создания подъемной силы, навигационное оборудование (не показано) в качестве средства для управления полетом, авиационное пусковое устройство 204 в качестве средства сопряжения с ракетой, предназначенное для отделения ракеты от самолета в полете.
Аэродинамические поверхности для создания подъемной силы крыла 203 выполнены трапециевидной формы в плане.
Горизонтальное оперение состоит из двух цельноповоротных консолей 205.
Вертикальное оперение состоит из двух килей 206 с рулями направления.
Каждое средство создания тяги выполнено в виде двух двухконтурных турбореактивных двигателей 202 с форсажной камерой и регулируемым соплом.
Двигатели 202 размещены в общей мотогондоле в хвостовой части фюзеляжа 201.
Самолет снабжен по бокам носовой части фюзеляжа 201 двумя регулируемыми воздухозаборниками 207 с горизонтальным расположением клина.
Самолет снабжен инерциально-спутниковой навигационной системой.
Самолет снабжен средствами предстартового контроля, пуска и управления полетом ракеты, средством крепления ракеты, предназначенным для отделения ракеты от самолета в полете, при запуске ракеты по траектории.
Типовая траектория выведения космического аппарата (фиг.6) включает следующие этапы.
I. Взлет самолета с ракетой.
II. Набор высоты.
III. Крейсерский полет на дозвуковой скорости с выходом в плоскость орбиты космического аппарата в расчетное время. При удалении плоскости орбиты от аэродрома старта свыше 1200 км после выхода в плоскость орбиты выполняется дозаправка самолета от самолета-заправщика типа Ил-78.
IV. Разгон до сверхзвуковой скорости М=2,65 на высоте 13000 м.
V. Предпусковой маневр, при котором выполняется в течении 15-20 секунд переход в набор высоты с углом наклона траектории 15-17 градусов.
VI. Отделение ракеты от самолета на высоте 18000 м при скорости 2340 км/час (650 м/сек). После старта ракеты самолет сохраняет курс для приема телеметрической информации с ракеты в течение времени работы двигателей первой и второй ступеней.
VII. Торможение и переход на дозвуковой режим полета на аэродром.
VIII. Выход на переходную баллистическую траекторию, высота апогея которой равна заданной высоте орбиты, при работе двигателей первой и второй ступеней.
IX. Отделение космического от второй ступени.
X. Запуск двигателя третьей ступени для обеспечения точного выхода космического аппарата так, что компенсируются отклонения от заданной траектории, накопленные во время работы двигателей твердого топлива первой и второй ступеней.
XI. Выход на орбиту третьей ступени. В апогее повторно включают жидкостной ракетный двигатель третьей ступени для разгона космического аппарата до орбитальной скорости.
XII. Отделение космического от третьей ступени.
Предложенная ракета при запуске с самолета типа МИГ-31 обеспечивает параметры траектории орбиты космического аппарата с отклонением:
- по наклонению орбиты - ±0,1 градус,
- по высоте и боковому отклонению от плоскости орбиты - ±5 км.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ СО СМЕШАННЫМ РЕЖИМОМ АЭРОДИНАМИЧЕСКОГО И КОСМИЧЕСКОГО ПОЛЕТА И СПОСОБ ЕГО ПИЛОТИРОВАНИЯ | 2007 |
|
RU2441815C2 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ ОБЪЕКТОВ НА ОКОЛОЗЕМНУЮ ОРБИТУ И МНОГОРАЗОВЫЙ СОСТАВНОЙ АЭРОКОСМИЧЕСКИЙ РАКЕТНЫЙ САМОЛЕТ-НОСИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (АЭРОКОСМИЧЕСКАЯ СИСТЕМА " НУР-САИД") | 2001 |
|
RU2232700C2 |
| СПОСОБ АВИАЦИОННО-КОСМИЧЕСКОГО ВЫВЕДЕНИЯ НА ОКОЛОЗЕМНУЮ ОРБИТУ МАЛЫХ ИСКУССТВЕННЫХ СПУТНИКОВ | 2001 |
|
RU2209744C2 |
| Многоразовая космическая система и способ ее управления | 2019 |
|
RU2717406C1 |
| РАКЕТА-НОСИТЕЛЬ, СБРАСЫВАЕМАЯ С САМОЛЕТА-НОСИТЕЛЯ, И СПОСОБ ЕЕ ЗАПУСКА В ВОЗДУХЕ И УПРАВЛЕНИЕ ПОЛЕТОМ | 1989 |
|
RU2026798C1 |
| МНОГОРАЗОВАЯ ПЕРВАЯ СТУПЕНЬ РАКЕТЫ-НОСИТЕЛЯ | 2022 |
|
RU2790569C1 |
| УСТРОЙСТВО КОРМОВОЙ ЧАСТИ КОРПУСА КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2516923C2 |
| МНОГОРЕЖИМНЫЙ САМОЛЕТ-РАЗГОНЩИК АВИАЦИОННОГО РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА | 1999 |
|
RU2175934C2 |
| РАКЕТА-НОСИТЕЛЬ | 2011 |
|
RU2482030C2 |
| СРЕДСТВА, СПОСОБ И СИСТЕМА ЗАПУСКА КОСМИЧЕСКИХ АППАРАТОВ НА ОСНОВЕ БУКСИРУЕМОГО ПЛАНЕРА (ИХ ВАРИАНТЫ) | 1995 |
|
RU2175933C2 |
Изобретения относятся к летательным аппаратам, транспортируемым другими летательными аппаратами. Ракета содержит первую ступень, имеющую первое средство создания тяги и устройство управления первым средством при движении по траектории, вторую ступень, имеющую средство создания тяги, средство крепления первой ступени к самолету, предназначенное для отделения ракеты от самолета в полете, и космический аппарат. Средство создания тяги первой ступени выполнено с возможностью управления вектором тяги с ограничением по величине скоростного напора. Средство создания тяги второй ступени выполнено с возможностью терминального управления величиной импульса тяги, позволяющей получить минимальное отклонение от заданной траектории в момент выключения двигателя. Средство создания тяги первой ступени выполнено в виде ракетного двигателя твердого топлива, имеющего сопло и привод отклонения сопла для управления вектором тяги. Самолет предназначен для запуска по траектории ракеты с космическим аппаратом в полете. Авиационно-космический комплекс предназначен для запуска по траектории полезной нагрузки и содержит ракету, самолет и средство крепления первой ступени ракеты к самолету, предназначенное для отделения ракеты от самолета в полете. Способ запуска по траектории космического аппарата включает выведение ракеты с космическим аппаратом посредством самолета в восходящий узел траектории ракеты; отделение ракеты от самолета, движение ракеты по траектории при управлении вектором тяги. Технический результат - уменьшение неблагоприятных последствий от потерь, связанных с аэродинамическим сопротивлением, потерями энергии из-за действия гравитационных сил. 4 н. и 22 з.п. ф-лы, 8 ил.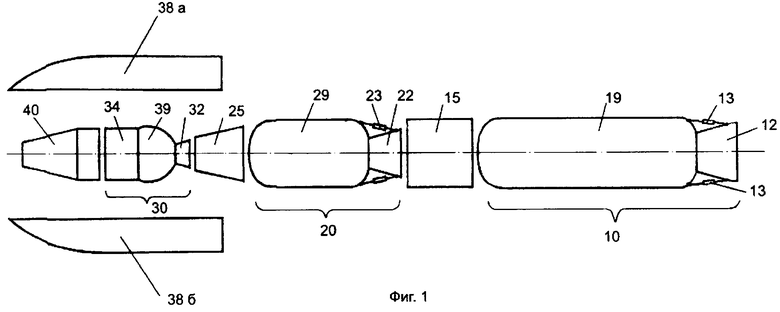
| US 4901949 A, 20.02.1990 | |||
| МНОГОРЕЖИМНЫЙ САМОЛЕТ-РАЗГОНЩИК АВИАЦИОННОГО РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА | 1999 |
|
RU2175934C2 |
| АВИАЦИОННО-КОСМИЧЕСКАЯ СИСТЕМА | 1999 |
|
RU2160215C1 |
| US 6068211 A, 30.05.2000 | |||
| СПОСОБ ЗАДАНИЯ МАРШРУТА ДВИЖЕНИЯ ПЛАНИРУЮЩЕГО ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕРМИНАЛЬНЫМ УПРАВЛЕНИЕМ | 2003 |
|
RU2251664C1 |
| СПОСОБ АВИАЦИОННО-КОСМИЧЕСКОГО ВЫВЕДЕНИЯ НА ОКОЛОЗЕМНУЮ ОРБИТУ МАЛЫХ ИСКУССТВЕННЫХ СПУТНИКОВ | 2001 |
|
RU2209744C2 |

