Изобретение относится к наведению летательных аппаратов (ЛА) и может быть использовано для решения задач выбора маршрутов движения беспилотных планирующих летательных аппаратов (БПЛА) или пилотируемых ЛА, совершающих полет в автоматическом режиме со скоростями, для которых числа Маха не превышают 8...10 единиц.
Известен способ задания типового маршрута БПЛА [1], управляемого по методу требуемых ускорений с построением терминальной географической системы координат (ТГСК) в точке прицеливания. Маршрут задается последовательно проходимым рядом узловых точек маршрута (ТМ), определяемых своими широтами и долготами, а также высотами над уровнем моря. В узловых ТМ задается требуемая ориентация вектора скорости. Перечисленные величины составляют параметры маршрута.
Рассматриваемые типовые маршруты содержат участок захода в район точки прицеливания (ТП) (с близким к горизонтальному движением) и участок пикирования в заданную ТП.
Недостаток известного способа заключается в том, что параметры маршрута задаются неформализованным образом только исходя из требуемого вертикального и горизонтального профиля траектории без строгого учета динамических свойств ЛА и скорости расходования запаса полной механической энергии, которым располагает ЛА в начальной точке маршрута. В результате маршрут зачастую оказывается нереализуемым.
Целью изобретения является разработка формализованного способа задания криволинейного в плане маршрута движения ЛА, применение которого гарантирует задание реализуемого маршрута и приведение ЛА в ТП с заданной точностью и с практически расчетной скоростью.
Указанная цель достигается тем, что выполняют задание маршрута в направлении, обратном движению ЛА от точки прицеливания к точке начала маршрута, задают расположение узловых ТМ с помощью двух шаблонов Ш1 и Ш2, изображающих след одной из стандартных попадающих траекторий, приводящих ЛА в ТП, совмещают точку 0 Ш1 с началом ТГСК и придают Ш1 необходимую ориентацию, переносят на плоскость ТГСК контур дуги Ш1, выполняют при необходимости наложение Ш2 на ТГСК в зеркальном положении относительно Ш1 с касанием Ш1 и Ш2 в одноименной произвольной точке, “прокатывают” Ш2 по дуге Ш1 с визуальной оценкой получения необходимого положения точки касания (ТК), переносят на плоскость ТГСК контур дуги Ш2 и помечают ТК как узловую ТМ, повторяют при необходимости две последние операции, меняя Ш2 на Ш1 и обратно до тех пор, пока маршрут движения ЛА не будет построен полностью, в узловых ТМ замерами определяют требуемые углы между направлениями векторов скорости и звеньями маршрута.
Анализ патентной литературы показал, что до даты подачи отсутствовали способы с указанной совокупностью существенных признаков, что говорит о новизне заявляемого технического решения.
Поиск технических решений в смежных областях техники не позволил выявить отличительные признаки заявляемого технического решения, что соответствует критерию “изобретательский уровень”.
Предложенный способ базируется на использовании заблаговременно подготовленного шаблона, изображающего след одной из принятых за стандартные траекторий переменной кривизны, приводящих БПЛА в ТП.
Стандартизация траекторий обеспечивается тем, что задаются стандартными при управлении БПЛА по методу требуемых ускорений:
скорость V0, высота траектории H0, угол наклона вектора скорости к плоскости местного горизонта θ0, угол упреждения ψ0 в точке начала захода (НЗ);
радиус окружности Rзхд начала участка захода, а также радиус окружности Rпик начала участка пикирования в заданную ТП, необходимый для определения момента переключения управления из режима захода в район точки прицеливания в режим пикирования в точку прицеливания;
требуемые высота траектории H
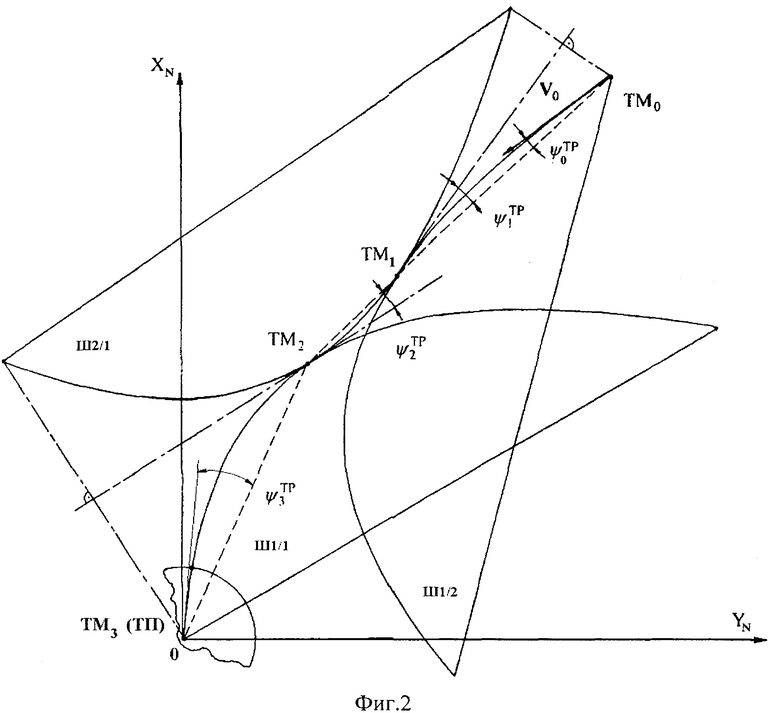
На фиг.1 представлен в системе прямоугольных координат ODB вид в плане некоторой траектории, в дальнейшем принимаемой в качестве стандартной, для которой заданы вышеперечисленные краевые условия из условия получения траектории, удовлетворяющей необходимым критериям.
След траектории в системе координат ODB представляет собой шаблон для задания криволинейного маршрута движения БПЛА.
Для реализации способа требуется:
1. Шаблон изготовить в требуемом масштабе и использовать совместно с картой того же масштаба.
2. Задание маршрута выполнять в направлении, обратном направлению движения БПЛА, то есть от точки прицеливания к точке начала участка захода.
3. Для прокладки сложного маршрута с точками перегиба одновременно использовать два шаблона, которые для краткости именуют Ш1 и Ш2. Второй шаблон является зеркальной копией первого. Второй шаблон “прокатывают” по дуге первого шаблона без проскальзываний. Точка касания дает точку перегиба маршрута, то есть точку перехода линии маршрута с дуги первого шаблона на дугу второго.
4. В точках перегиба маршрута назначить узловые ТМ. В узловых ТМ, кроме расположенной в начале маршрута, замерами определить требуемые величины углов поворота вектора скорости ψ
При реализации предлагаемого способа задания маршрута движения планирующего летательного аппарата с терминальным управлением предполагается следующая последовательность действий:
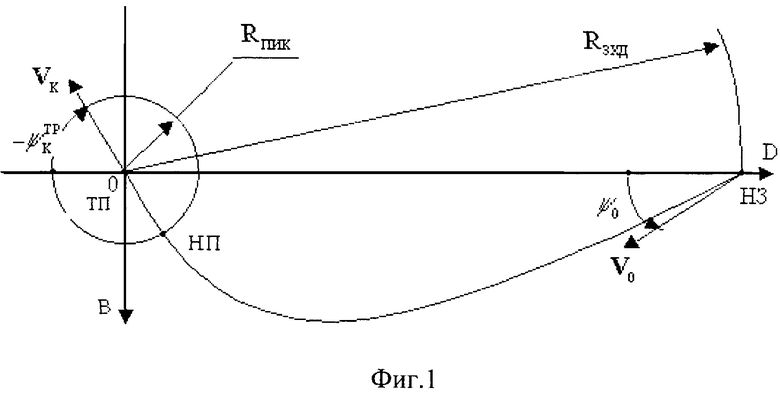
выполняют построение терминальной географической системы координат OXNYN в плоскости местного горизонта с началом в ТП, см. фиг.2;
помещают в ТП последнюю узловую ТМ;
совмещают точку 0 Ш1 с началом ТГСК и придают Ш1 необходимую ориентацию;
переносят на плоскость ТГСК контур дуги Ш1;
выполняют при необходимости наложение Ш2 на ТГСК в зеркальном положении относительно Ш1 с касанием Ш1 и Ш2 в одноименной произвольной точке;
“прокатывают” Ш2 по дуге Ш1 с визуальной оценкой достижения необходимого положения точки касания (ТК);
переносят на плоскость ТГСК контур дуги Ш2 и помечают ТК как узловую ТМ;
повторяют при необходимости две последние операции, меняя Ш2 на Ш1 и обратно до тех пор, пока маршрут движения БПЛА не будет построен полностью, то есть до точки НЗ любого из шаблонов;
выполняют расчет широт и долгот FТМi, LTMi точек маршрута для i=[0...NTM], где NTM - номер последней ТМ, помещаемой в точку прицеливания;
в узловых ТМ, кроме расположенной в начале маршрута, замерами определяют требуемые величины углов поворота вектора скорости ψ
Построенный в соответствии с вышеизложенным маршрут, задаваемый тремя узловыми ТМ, и положение шаблонов изображены на фиг.2 в терминальной географической системе координат.
Источники информации
1. Разоренов Г.Н. и др. Системы управления летательными аппаратами (баллистическими ракетами и их головными частями): Учебник для вузов /Г.Н.Разоренов, Э.А.Бахрамов, Ю.Ф.Титов; Под ред. Г.Н.Разоренова. М.: Машиностроение, 2003, 584 с., ил. (с.409, 420).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления беспилотным планирующим летательным аппаратом | 2017 |
|
RU2654238C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ ДИСТАНЦИОННОЙ КОРРЕКЦИИ ПОЛЕТНОГО ЗАДАНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2755411C1 |
| Способ сокращения потерь скорости и времени при осуществлении маневра заданной конфигурации беспилотным летательным аппаратом планирующего типа | 2016 |
|
RU2623361C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРЕМЕНЕМ ПРИЛЕТА СПУСКАЕМОГО АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА В ЗАДАННУЮ ТОЧКУ ЗЕМНОЙ ПОВЕРХНОСТИ | 2008 |
|
RU2388985C1 |
| Способ управления беспилотным планирующим летательным аппаратом на траекториях с изменениями направлений движения в заданных опорных точках | 2019 |
|
RU2708412C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2481558C2 |
| ИМИТАЦИОННАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ВОЗДУШНОЙ МИШЕНЬЮ НА ОСНОВЕ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ИЗ СОСТАВА МИШЕННОГО КОМПЛЕКСА | 2020 |
|
RU2782035C2 |
Способ задания маршрута движения планирующего летательного аппарата с терминальным управлением для повышения эффективности в эксплуатации заключается в том, что выполняют задание маршрута в направлении, обратном движению ЛА от точки прицеливания к точке начала маршрута. 2 ил.
Способ задания маршрута движения планирующего летательного аппарата (ЛА) с терминальным управлением, включающий построение терминальной географической системы координат (ТГСК) в точке прицеливания, формирование последовательности узловых точек маршрута (ТМ) с помещением последней узловой ТМ в ТП, расчет широт и долгот узловых ТМ и азимута вектора скорости в начале маршрута, отличающийся тем, что выполняют задание маршрута в направлении обратном движению ЛА от точки прицеливания к точке начала маршрута, задают расположение узловых ТМ с помощью двух шаблонов Ш1 и Ш2, изображающих след одной из стандартных попадающих траекторий, приводящих ЛА в ТП, совмещают точку 0 Ш1 с началом ТГСК и придают Ш1 необходимую ориентацию, переносят на плоскость ТГСК контур дуги Ш1, выполняют при необходимости наложение Ш2 на ТГСК в зеркальном положении относительно Ш1 с касанием Ш1 и Ш2 в одноименной произвольной точке, “прокатывают” Ш2 по дуге Ш1 с визуальной оценкой получения необходимого положения точки касания (ТК), переносят на плоскость ТГСК контур дуги Ш2 и помечают ТК как узловую ТМ, повторяют при необходимости две последние операции, меняя Ш2 на Ш1 и обратно до тех пор, пока маршрут движения ЛА не будет построен полностью, в узловых ТМ замерами определяют требуемые углы между направлениями векторов скорости и звеньями маршрута.
| РАЗОРЕНОВ Г.Н | |||
| И ДР | |||
| СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ (БАЛЛИСТИЧЕСКИМИ РАКЕТАМИ И ИХ ГОЛОВНЫМИ ЧАСТЯМИ): УЧЕБНИК ДЛЯ ВУЗОВ/ Г.Н.РАЗОРЕНОВ, Э.А.БАХРАМОВ, Ю.Ф.ТИТОВ, ПОД РЕД | |||
| Г.Н.РАЗОРЕНОВА | |||
| М.: МАШИНОСТРОЕНИЕ, 2003, 584 С.: (С.409, 420).GB 1041191 A, 01.09.1966 | |||
| US 5067901 A, 26.11.1991 | |||
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 2023 |
|
RU2814218C1 |

